微处理器和指令系统
第03-1章. 80868088微处理器及其系统

3.1.1、8086/8088CPU的内部结构
执行单元( Execute Unit ) 总线接口单元 ( Bus Interface Unit )
8088的内部结构
AH BH CH DH AL BL CL DL SP BP SI DI
16位
地址 加法 器
∑
20位
通用 寄存器
CS DS SS ES IP 内部暂存器
PA的书写方式:
段地址:段内偏移
如:1121H : 2200H=11210+2200=13410H
已知CS=1055H,DS=250AH,ES=2EF0H, SS=8FF0H,DS段有一操作数,其偏移地址=0204H, 1)画出各段在内存中的分布 2)指出各段首地址 10550H CS 3)该操作数的物理地址=?
2.地址加法器和段寄存器
BIU中的地址加法器用来实现逻辑地址到物理地址的变换 8086采用了 “段加偏移”的技术。
15 0 15 0
逻辑地址
段基值
3 0
偏移量
0000
各段寄存器分别来存放确定各段的 起始地址的16位段地址信息
寻址单元的16位偏移地址
Σ
19 0
物理地址
物理地址
左移4位后的段寄存器的内容同时 送到地址加法器进行相加
CH DH CL DL
地址 加法 器
∑
20位
CS DS SS ES IP 内部暂存器
16位
输入/输出 控制电路 外 部 总 线
1 2
8位
3 4
把EU的操作结果存储 标志寄存器 到指定的M或I/O口。
执行部件 (EU)
指令队列
总线接口部件 (BIU)
单片机课件第二章 ARM体系结构

2.5
ARM微处理器指令系统
2.5.1 基本寻址方式
寻址方式是根据指令中给出的地址码字段来实现寻找真实操作数地 址的方式,ARM处理器有9 种基本寻址方式。
1.寄存器寻址
操作数的值在寄存器中,指令中的地址码字段给出的是寄存器编 号,指令执行时直接取出寄存器值操作。
例如指令: MOV R1,R2 SUB R0,R1,R2
11111
系统模式
PC,R14~R0,CPSR(ARM v4及以上版本)
并非所有的模式位组合都能定义一种有效的处理器模式。其他组合的 结果不可预知。
2.2 ARM微处理器的寄存器结构
2.2.4 Thumb状态的寄存器集
2.2 ARM微处理器的寄存器结构
2.2.4 Thumb状态的寄存器集
Thumb 状态的寄存器在ARM 状态的寄存器上的映射
在Thumb状态下,程序计数器PC(Program Counter)使用位[1]选 择另一个半字。ARM处理器在两种工作状态之间可以切换。
Thumb状态:当操作数PSR控制位T为1时,执行BX指令进入Thumb 状态。如果处理器在Thumb状态进入异常,则当异常处理(IRQ、 FIQ、Undef、Abort和SWI)返回时,自动转换到Thumb状态。(异 常都是在ARM 状态中执行) ARM状态:当操作数PSR控制位T为0时,执行BX指令进入ARM状态 ;处理器发生异常(IRQ、FIQ、Reset、Undef、Abort和SWI)。在 此情况下,把PC内容复制到异常模式的链接寄存器中,并且异常处 理将从异常向量地址开始。
sys(系统模式):运行具有特权的操作系统任务。
und(未定义指令中止模式):当未定义的指令执行时进入该 模式,可用于支持硬件协处理器的软件仿真。
《微处理器系统结构与嵌入式系统设计》课程教案

《微处理器系统结构与嵌入式系统设计》课程教案第一章:微处理器概述1.1 微处理器的定义与发展历程1.2 微处理器的组成与工作原理1.3 微处理器的性能指标1.4 嵌入式系统与微处理器的关系第二章:微处理器指令系统2.1 指令系统的基本概念2.2 常见的指令类型及其功能2.3 指令的寻址方式2.4 指令执行过程第三章:微处理器存储系统3.1 存储器的分类与特点3.2 内存管理单元(MMU)3.3 存储器层次结构与缓存技术3.4 存储系统的性能优化第四章:微处理器输入/输出系统4.1 I/O 接口的基本概念与分类4.2 常见的I/O 接口技术4.3 直接内存访问(DMA)4.4 interrupt 与事件处理第五章:嵌入式系统设计概述5.1 嵌入式系统的设计流程5.2 嵌入式处理器选型与评估5.3 嵌入式系统硬件设计5.4 嵌入式系统软件设计第六章:嵌入式处理器架构与特性6.1 嵌入式处理器的基本架构6.2 嵌入式处理器的分类与特性6.3 嵌入式处理器的发展趋势6.4 嵌入式处理器选型considerations 第七章:数字逻辑设计基础7.1 数字逻辑电路的基本概念7.2 逻辑门与逻辑函数7.3 组合逻辑电路与触发器7.4 微处理器内部的数字逻辑设计第八章:微处理器系统设计与验证8.1 微处理器系统设计流程8.2 硬件描述语言(HDL)与数字逻辑设计8.3 微处理器系统仿真与验证8.4 设计实例与分析第九章:嵌入式系统软件开发9.1 嵌入式软件的基本概念9.2 嵌入式操作系统与中间件9.3 嵌入式软件开发工具与环境9.4 嵌入式软件编程实践第十章:嵌入式系统应用案例分析10.1 嵌入式系统在工业控制中的应用10.2 嵌入式系统在消费电子中的应用10.3 嵌入式系统在医疗设备中的应用10.4 嵌入式系统在其他领域的应用案例分析第十一章:嵌入式系统与物联网11.1 物联网基本概念与架构11.2 嵌入式系统在物联网中的应用11.3 物联网设备的硬件与软件设计11.4 物联网安全与隐私保护第十二章:实时操作系统(RTOS)12.1 实时操作系统的基本概念12.2 RTOS的核心组件与特性12.3 常见的实时操作系统及其比较12.4 实时操作系统在嵌入式系统中的应用第十三章:嵌入式系统功耗管理13.1 嵌入式系统功耗概述13.2 低功耗设计技术13.3 动态电压与频率调整(DVFS)13.4 嵌入式系统的电源管理方案第十四章:嵌入式系统可靠性设计14.1 嵌入式系统可靠性概述14.2 故障模型与故障分析14.3 冗余设计技术与容错策略14.4 嵌入式系统可靠性评估与测试第十五章:现代嵌入式系统设计实践15.1 现代嵌入式系统设计挑战15.2 多核处理器与并行处理15.3 系统级芯片(SoC)设计与集成15.4 嵌入式系统设计的未来趋势重点和难点解析第一章:微处理器概述重点:微处理器的定义、发展历程、组成、工作原理、性能指标。
微处理器的指令系统.
BR 指令 X 基址值 IR 变址
段寄存器 段首址 左移 4 位
+
EA
+
PA
操作数
说明:X表示位移量,其值是用8位或16位二进制补码表示的有符号 BR表示基址寄存器,只能选用BX、BP之一;IR表示变址寄存器,只能选用SI DI之一。BR的内容加上IR的内容,再加上X,所得之和是操作数的偏移地址EA 所以,在基址加变址寻址方式中,操作数的偏移地址EA按如下公式计算:
BR
指令 基址值
段寄存器 段首址 左移 4 位
+
IR 变址值
EA
+
PA 操作数
图2.9 基址变址寻址
说明:BR表示基址寄存器,只能选用BX、BP之一;IR表示变址寄存器, 只能选用SI、DI之一。BR的内容加上IR的内容是操作数的偏移地址EA,所以,在基址变址 [BX]+[SI],用BX作基址寄存器,SI作变址 寻址方式中,操作数的偏移地址EA按如下公式计算: 寄存器时 [BX]+[DI],用BX作基址寄存器,DI作变址 EA= 寄存器时 [BP]+[SI],用BP作基址寄存器,SI作变址 寄存器时 [BP]+[DI],用BP作基址寄存器,DI作变址 【例2.7】 MOV AX,[BX][DI]。 执行前:BX=2000H,DI=0002H寄存器时 ,DS=3000H,(32002H)=1AFEH 目的操作数地址是AX。源操作数采用基址变址寻址,基址寄存器选用了BX,变址寄存 器选用了DI。由于源操作数选用BX作基址寄存器,所以其物理地址PA由数据段寄存器DS 的内容左移4位与偏移地址EA相加形成,即源操作数的PA=(DS)左移4位+BX+DI=32002H, (32002H)=1AFEH,所以 执行后:AX=1AFEH,BX、DI、DS、(32002H)未变。 【例2.8】 MOV [BX+SI],CX。 执行前:DS=1000H,BX=300H,SI=50H,CX=1234H,(10350H)=0FFFFH 目的操作数采用基址变址寻址方式,基址寄存器选用了BP,段寄存器就是DS,变址寄 存器选用了SI。所以,其物理地址PA由堆栈段寄存器DS的内容左移4位与偏移地址EA相加 形成,即目的操作数的PA=(DS)左移4位+BX+SI =10350H,所以 执行后:(10350H)=1234H,BX、SI、CX的内容不变。 5. 相对基址加变址寻址 在相对基址加变址寻址方式中,操作数的偏移地址EA是指令中指定的基址寄存器内容
《微型计算机系统原理及应用》课后答案_(第3版)清华大学出版社__杨素行
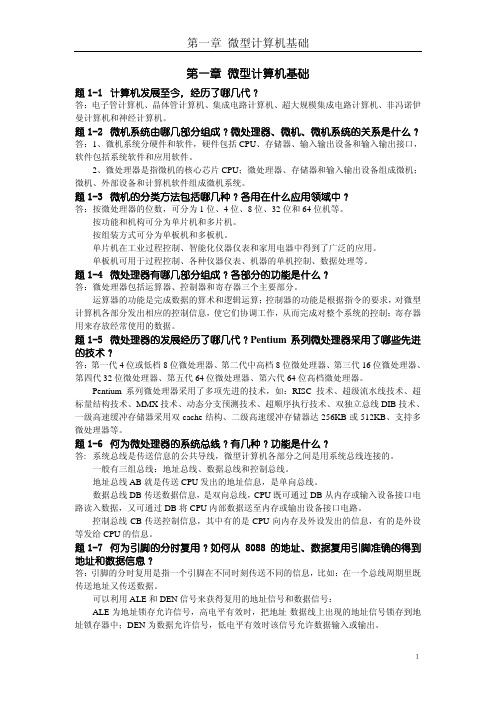
第一章 微型计算机基础题1-1 计算机发展至今,经历了哪几代?答:电子管计算机、晶体管计算机、集成电路计算机、超大规模集成电路计算机、非冯诺伊曼计算机和神经计算机。
题1-2 微机系统由哪几部分组成?微处理器、微机、微机系统的关系是什么? 答:1、微机系统分硬件和软件,硬件包括CPU、存储器、输入输出设备和输入输出接口,软件包括系统软件和应用软件。
2、微处理器是指微机的核心芯片CPU;微处理器、存储器和输入输出设备组成微机;微机、外部设备和计算机软件组成微机系统。
题1-3 微机的分类方法包括哪几种?各用在什么应用领域中?答:按微处理器的位数,可分为1位、4位、8位、32位和64位机等。
按功能和机构可分为单片机和多片机。
按组装方式可分为单板机和多板机。
单片机在工业过程控制、智能化仪器仪表和家用电器中得到了广泛的应用。
单板机可用于过程控制、各种仪器仪表、机器的单机控制、数据处理等。
题1-4 微处理器有哪几部分组成?各部分的功能是什么?答:微处理器包括运算器、控制器和寄存器三个主要部分。
运算器的功能是完成数据的算术和逻辑运算;控制器的功能是根据指令的要求,对微型计算机各部分发出相应的控制信息,使它们协调工作,从而完成对整个系统的控制;寄存器用来存放经常使用的数据。
题1-5 微处理器的发展经历了哪几代?Pentium系列微处理器采用了哪些先进的技术?答:第一代4位或低档8位微处理器、第二代中高档8位微处理器、第三代16位微处理器、第四代32位微处理器、第五代64位微处理器、第六代64位高档微处理器。
Pentium系列微处理器采用了多项先进的技术,如:RISC技术、超级流水线技术、超标量结构技术、MMX技术、动态分支预测技术、超顺序执行技术、双独立总线DIB技术、一级高速缓冲存储器采用双cache结构、二级高速缓冲存储器达256KB或512KB、支持多微处理器等。
题1-6 何为微处理器的系统总线?有几种?功能是什么?答: 系统总线是传送信息的公共导线,微型计算机各部分之间是用系统总线连接的。
微机原理第3章-指令系统
▲按给出偏移地址方式的不同,分为以下5种: 寄存器间接寻址 寄存器相对寻址 基址加变址寄存器 相对基址加变址寄存器 MOV AL, [ BX ] MOV AL, [ BX + 10H ] MOV AL, [ BX + SI ] MOV AL, [ BX + SI + 10H ]
(1)寄存器间接寻址
寄存器寻址方式的操作数是寄存器的值,指令中直接 使用寄存器名,包括8位或16位通用寄存器和段寄存器。可 使用的16位寄存器:AX、BX、CX、DX、SI、DI、SP、 BP;其中:AX、BX、CX、DX可分成两8位使用。
例: MOV AX,CX
;(AX)
(CX)
INC CX
;(CX)
(CX)+1
3.直接寻址(Direct Addressing)
0002
AH
AL
默认段寄存器的关系: ① 使用BX、SI、DI,默认段寄存器为DS
(BX)
PA = ( DS )×10H + (SI) (DI)
② 使用BP,默认段寄存器为SS PA = ( SS )×10H + ( BP )
使用BX、SI、DI的寄存器寻址,默认段寄存器为DS
寄存器组 AH AL BH BL CH CL DH DL SI DI BP SP AX BX CX DX DS ES SS CS IP 地 址 加 法 器
运 算 器
控制总线CB
码
器
PSW标志 寄存器
执行部件控制电路
CPU
总线
内存
例: MOV AX , [ BX + SI ]
若 ( DS ) = 4000H
( BX ) = 2000H ( SI ) = 100H 则内存操作数的物理地址为:
数控系统的组成

数控系统的组成
1 数控系统的组成
数控系统是由多种元件组成的控制系统,其中最主要的元件包括微处理器、数据输入设备、数据输出装置、存储器和算法程序等。
1.1 微处理器
微处理器是数控系统的核心部件,它主要用来处理计算、控制和调整系统中的信息和数据。
它被设计用来分析系统中输入信号形成的数据,根据程序发出控制信号,实现各种机械设备的控制。
1.2 数据输入设备
数据输入设备由不同的传感器组成,它们能够收集机器的实时状态,输入到处理器中,用于数据分析和控制操作。
1.3 数据输出装置
数据输出装置是将处理器处理后的数据重新输出到机器环境中,进行显示和控制,保证机器的正常运行。
1.4 存储器
存储器主要负责存储系统中的各种程序指令和数据,将微处理器分析的数据和程序码存储起来,以便后续使用。
1.5 算法程序
算法程序是数控系统的关键要素,它由计算机控制所需的数学公式和语句所组成,其目的是实现机器系统控制所需的标准和特性。
总之,数控系统由上述五个元件组成,它们起到协调系统不同部件之间的功能,实现数控系统的基本功能。
微机原理、汇编语言及接口技术教程课后习题答案

!《16/32位微机原理、汇编语言及接口技术教程》部分习题参考解答第1章微型计算机系统概述〔习题〕什么是通用微处理器、单片机(微控制器)、DSP芯片、嵌入式系统〔解答〕通用微处理器:适合较广的应用领域的微处理器,例如装在PC机、笔记本电脑、工作站、服务器上的微处理器。
单片机:是指通常用于控制领域的微处理器芯片,其内部除CPU外还集成了计算机的其他一些主要部件,只需配上少量的外部电路和设备,就可以构成具体的应用系统。
~DSP芯片:称数字信号处理器,也是一种微控制器,其更适合处理高速的数字信号,内部集成有高速乘法器,能够进行快速乘法和加法运算。
嵌入式系统:利用微控制器、数字信号处理器或通用微处理器,结合具体应用构成的控制系统,其典型的特点是把计算机直接嵌入到应用系统之中。
〔习题〕说明微型计算机系统的硬件组成及各部分作用。
〔解答〕CPU:CPU也称处理器,是微机的核心。
它采用大规模集成电路芯片,芯片内集成了控制器、运算器和若干高速存储单元(即寄存器)。
处理器及其支持电路构成了微机系统的控制中心,对系统的各个部件进行统一的协调和控制。
存储器:存储器是存放程序和数据的部件。
(外部设备:外部设备是指可与微机进行交互的输入(Input)设备和输出(Output)设备,也称I/O设备。
I/O设备通过I/O接口与主机连接。
总线:互连各个部件的共用通道,主要含数据总线、地址总线和控制总线信号。
〔习题〕什么是总线微机总线通常有哪3组信号各组信号的作用是什么〔解答〕总线:传递信息的共用通道,物理上是一组公用导线。
3组信号线:数据总线、地址总线和控制总线。
(1)地址总线:传输将要访问的主存单元或I/O端口的地址信息。
#(2)数据总线:传输读写操作的数据信息。
(3)控制总线:协调系统中各部件的操作。
〔习题〕简答如下概念:(1)计算机字长(2)取指-译码-执行周期(3)ROM-BIOS(4)中断((5)ISA总线〔解答〕(1)处理器每个单位时间可以处理的二进制数据位数称计算机字长。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
微处理器和指令系统一、选择题1、微型计算机中的运算器,将运算结果的一些特征标志寄存在(FR)中。
2、微处理器内部的控制器是由(ALU与寄存器)组成。
3. 8086微处理器内部能够计算出访问内存储器的20位物理地址的附加机构是(加法器)。
4. 若有两个带有符号数ABH和FFH相加,其结果使FR中CF和OF 位为(1和0)。
5. 逻辑地址是(允许在程序中编排的)地址。
6.字符串操作时目标串逻辑地址只能由(ES、DI)提供。
5. 8086微处理器中的ES是(附加段)寄存器。
6.8086处理器最小工作方式和最大工作方式的主要差别是(单处理器和多处理器的不同)。
7.8086微处理器内部通用寄存器中的指针类寄存器是(AX)。
8.8086/8088微处理器引脚中(B)信号线能够反映标志寄存器中断允许标志位下的当前值。
A. 7S B.5S C. 4S D. 6S 9.若进行加法运算的两个操作数为ABH和8BH,其结果使得CF和OF 为(1和l)。
10.欲使RESET有效, 只要(接通电源或按RESET键)即可。
11.8086微处理器内部具有自动增1功能的寄存器是(IP)。
12.最大方式下8086系统送8288总线控制器的状态信号为( A )。
A. 2S 、1S 、0SB. R /DT C .0SS D. DEN13.8086/8088微处理器状态信号共有( 5)条。
14.编程人员不能直接读写的寄存器是(IP )。
15. 16位带有符号数的补码数据范围为( +32767~-32768)。
16.8086/8088微处理器可访问内存储器地址为(00000H ~FFFFFH )。
17.当标志寄存器FR 中OF 位等于1时,表示带有符号的字运算超出数据(–32768~32767)范围。
18.8086/8088微处理器CLK 引脚输入时钟信号是由(8284)提供的。
19.8086微处理器引脚2S 1S 0S 处于(001)状态时,表明读I/O 端口。
20.8086/8088微处理器中的段寄存器中的CS 作为段基值,偏移量允许使用(IP )。
21.8086微处理器以BP 内容作为偏移量,则段基值是由(SS )寄存器提供。
22.8086/8088微处理器中的寄存器可以用做8 位或16位寄存器,如( D )。
A. SI B .SP C. IP D. CX23.在最小方式下,原8l86微处理器最大方式下2S 、1S 、0S 引脚应改为( C )。
A. M/IO 、DEN 、DT/R B .DT/R 、M/IO 、DEN C. M/IO 、DT/R 、DEN D. DEN 、M/IO 、DT/R24.访问I/O 端口可用地址线有(16)条.25.最大方式下引脚25号和24号分别为0QS 和1QS ,若工作于最小方式下则分别为(B )。
A. INTA 和ALE B .ALE 和 C. TEST 和INTA D.DEN 和ALE 26.8086/8088微处理器顺序执行程序时,当遇到(JCXZ )指令时,指令队列会自动复位,BIU 会接着往指令队列中装入新的程序段指令。
27. 8086/8088微处理器中的BX 是(基址寄存器)。
28.8086微处理器中堆栈段用作为段基值则偏移量由( SP)提供。
29.8086微处理在最大方式下,2S 1S 0S 为(000)时,表示中断响应。
30. 8086 微处理器中 BP 寄存器是(基址指针寄存器)。
31. 8086微处理器中的DI 是(目的变址寄存器)。
32.8086处理器中寄存器(CX )通常用做数据寄存器,且隐含用法为计数寄存器。
33. 与配合以决定访问存储器的数据是高字节还是低字节工作,其BHE 仅在总线周期开始的(1T )周期有效。
34. 8086微处理器读总线周期中地址信号15AD ~0AD 在(2T )期间处于高阻。
35. 8088微处理器工作于最小方式下,引脚IO /M 、DT/R 、0SS 为(110)时,表示写I/O 端口。
36. 访问I/O 端口的指令,常以寄存器间接寻址方式在DX 中存放(I/0端口地址)。
37. 8086写总线周期中(1T ~4T )期间DT/R 信号保持高电平有效。
38. 当8086微处理器引脚1QS 0QS 为 10时表示(队列空)。
39.8086微处理器要求RESET 有效维持时间至少要有(4T)状态。
40. 最大方式8086系统中,送74LS245的DIR 和G 信号由8288的(DT/R 、DEN )信号提供.41.当RESET 信号有效后,CS 内容为(FFFF0H )。
42. 8086/8088写总线周期中,微处理器完成写入过程是在(4T )。
43.最小方式下的8086输出总线控制信号有(M/IO )。
44. 8086读总线周期1T ~4T 期间,(RD )信号一直保持有效。
45. 8086 处理器可寻址访问的最大I/O 空间为(64K )。
46.最小方式下的8086命令输出信号有(INTA )。
47. 由8088处理器组成的PC 机的数据线是( 8条双向线)。
48.最大方式8086系统中74LS373的G 信号是由8288总线控制器的(ALE )信号提供的。
49. 8086读写总线周期,微处理器是在(3T 下降沿)时刻采样READY 信号,以便决定是否插入w T 。
50. 8086处理器的一个典型总线周期需要( 4)个T 状态。
51. 8086处理器的一个总线周期在(3T )之后插入w T 。
52.8086/8088读总线周期中,微处理器是在(4T 下降沿) 时刻采样数据总线,以便获取数据。
53.在读/写总线周期中,在(1T )期间利用地址锁存允许信号的下降沿锁存20位地址信号。
54.8086微处理器引脚2S 1S 0S 处于(110)状态时,表明写存储器。
55. 8086微处理器写总线周期中的地址/数据复用线15AD ~0AD 在(2T ~4T )期间为输出数据。
SS为56. 8088微处理器工作于最小方式下,引脚IO/M、DT/R、0(001)表示读存储器方式。
57.8086工作于最大方式时,系统的控制总线的信号来自(8288)。
58.在8086/8088系统中,内存中采用分段结构,段与段之间是( D)。
A. 分开的B. 连续的C. 重叠的D.都可以59.具有指令流水线功能的CPU的特点是(提高CPU运行速度)。
60.8086写I/O总线周期的控制信号,一直保持低电平有效的是( A )。
A. M/IOB. DT/RC. DEND. WR二、填空题1、 8086CPU具有20条地址线,可直接寻址 1MB容量的内存空间,在访问I/O端口时,使用地址线 16条,最多可寻址64K个I/O端口。
2、8086CPU中的指令队列的作用是预取指令,其长度是 6 字节3、 8086的标志寄存器分为6 个状态标志位和3 个控制标志位,它们各自的含义和作用是什么?4、8086的存储器采用奇偶存储体结构,数据在内存中的存放规定是低字节存放在低地址中,高字节存放在高地址中,以低地址为字的地址,规则字是指低字节地址为偶地址的字,非规则字是指低字节的地址为奇地址的字。
5、写出能够完成下列操作的8086CPU指令。
(1) 把4629H传送给AX寄存器;(2) 从AX寄存器中减去3218H;(3) 把BUF的偏移地址送入BX中。
【解答】(1) MOV AX,4629H(2) SUB AX,3218H(3) LEA BX,BUF三、判断题1. 当执行部件执行指令需要数据时,可直接向存储器读取。
(×)改为“可以通过BIU向”2. 当执行单元EU执行指令结束时, EU能将计算结果存入指定的内存单元或IO端口。
(×)“存入”改为“通过BIU存入”3. 若BIU正在取指时,执行部件EU发出总线请求,侧必须等BIU 取指完毕,该请求方能得到响应。
(√)4. 8086 CPU中的BIU部件内部有6个字节的指令队列。
(×)/8088删掉5.当指令队列不满,执行部件又没有向指令队列请求时,则总线接口部件进入空闲状态。
(×)“进入空闲状态”改为“仍进入空闲状态”。
6. 8086微处理器取指令与执行指命时,总线总是处于忙状态。
(√)7. 总线接口部件和执行部件相互独立,互相配合,并行同步工作,提高了整机的运行速度。
(×)“并行同步工作”改为“并行异步工作”。
8. 通用寄存器中的变址寄存器也可以分为高8位、低8位单独使用。
(×)改为“不可以”。
9. 通用寄存器中的SP和BP都可以用于堆栈操作。
(√)10. 溢出与进位具有相同概念。
(×)改为“是不相同的两个概念”。
11.运算结果为零时,FR 中的ZF 为0。
(×)改为“ZF 为1”。
12. 运算结果中的低8位含有l 的个数为奇数,则PF 等于0。
(√)13.辅助进位位AF 用于BCD 码算术与逻辑算术。
(×) “用于BCD 码算术与逻辑运算”改为“只用于BCD 算术运算”。
14.存储器中几个段可以完全重叠,或者部分重叠。
(√)15.存取操作数时所需要的段内偏移量可以是指令中提供的直接地址。
(√)16.存取操作数时所需要的段内偏移量可以是一个允许使用的16位寄存器之值。
(√)17.存取操作数时所需要的段内偏移量可以是指令中的位移量加上16位地址寄存器内容。
(√)18. 15AD ~0AD 为地址/数据复用总线,其传送信息的方向相同。
(×)改为“ 方向不同”。
地址总线是单向的,数据总线的方向是双向的。
19. 619S /A ~316S /A 是4条地址/状态复用线,在访问存储器和I/O 操作时,可作为存储器或I/O 操作高4位地址线。
(×) “访问存储器和I/O 操作时,可作为存储器或I/O 操作高4位地址线”改为“访问存储器时可作为存储器高4位地址线。
I/O 操作时,地址线19A ~16A 为0”。
20.8086/8088微处理器具有相同的引脚15AD ~0AD ,并且地址与数据线分时复用。
(×) “8086/8088微处理器具有相同的引脚15AD ~0AD ”改为“8086微处理器引脚为15AD ~0AD ,8088微处理器引脚为7AD ~0AD ,15A ~8A ”。
21. 分时复用的高字节允许/状态7S 信号,当DMA 操作时为7S 信号。
(×) “DMA 操作时为7S 信号”改为“当DMA 操作时该引脚悬空”。
22. 8086微处理器信号INTR 是 电平触发的。
(√)23.8086微处理器信号NMI 是上升沿触发的,不可以用软件加以屏蔽的中断请求信号。