雷达天线及伺服系统
伺服系统在军 事装备中的关键作用是什么
伺服系统在军事装备中的关键作用是什么在当今的军事领域,先进的技术装备层出不穷,而伺服系统作为其中的关键组成部分,发挥着至关重要的作用。
那么,它究竟有着怎样的关键作用呢?首先,我们来了解一下什么是伺服系统。
简单来说,伺服系统是一种能够精确控制机械运动的自动控制系统。
它由控制器、驱动器、电机和传感器等部件组成,可以实现对位置、速度和加速度等运动参数的高精度控制。
在军事装备中,伺服系统的第一个关键作用是提高武器装备的精度和准确性。
以导弹为例,导弹的制导和飞行控制离不开伺服系统的精确运作。
在导弹发射后,伺服系统能够根据预设的目标信息和实时的飞行数据,精确调整导弹的飞行姿态、方向和速度,确保导弹能够准确命中目标。
这种高精度的控制能力,使得军事打击的效果得到了极大的提升,减少了不必要的损失和浪费。
其次,伺服系统有助于增强军事装备的响应速度和机动性。
在现代战争中,速度和机动性往往决定着战斗的胜负。
例如,战斗机的飞行控制面,如舵面和副翼,就是通过伺服系统来快速响应飞行员的操作指令。
当飞行员进行机动动作时,伺服系统能够在极短的时间内调整控制面的角度,从而改变飞机的飞行姿态和方向,使战斗机能够迅速躲避敌方攻击或占据有利的攻击位置。
同样,在坦克、装甲车等地面装备中,伺服系统也能够快速调整炮塔的旋转和火炮的俯仰角度,提高武器系统的反应速度和作战效能。
再者,伺服系统对于提高军事装备的稳定性和可靠性也起着不可或缺的作用。
在复杂的战场环境下,军事装备需要经受各种恶劣条件的考验,如高温、低温、振动、冲击等。
伺服系统通过精确的控制和反馈机制,能够有效地减少外部干扰对装备性能的影响,确保装备在各种极端条件下仍能稳定运行。
例如,在舰艇的航行过程中,伺服系统可以控制舵机的动作,保持舰艇的航向稳定,避免因风浪等因素导致的偏离。
这种稳定性和可靠性的保障,对于军事行动的顺利进行具有重要意义。
此外,伺服系统还能够实现军事装备的自动化和智能化操作。
浅谈雷达伺服系统的设计
270理论研究浅谈雷达伺服系统的设计石小萍,刘兴兴,陈 丁(西安黄河机电有限公司设计研究所,西安 710043)摘 要:本文介绍了雷达伺服系统的主要作用,以及雷达中常用的传动机构、驱动元件、位置检测装置的工作原理、主要性能和设计及选用方法,最后介绍了雷达伺服系统装置的性能参数检测方法。
关键词:伺服系统;执行机构;位置检测;误差分析;驱动电机1 引言 伺服系统是控制雷达位置及各种运动参数的电子设备,是典型的机电自动控制技术。
“伺服系统”实际上是控制天线机械传动系统按设定的运动规律,去自动地转动天线去捕获、跟踪目标或使天线转动到某位置。
伺服系统也被称为“随动系统”。
伺服系统与其他控制系统的区别是被控制的输出量是机械位移(角位移)、速度(角速度)或加速度(角加速度)。
给定的输入量往往是小功率的信号。
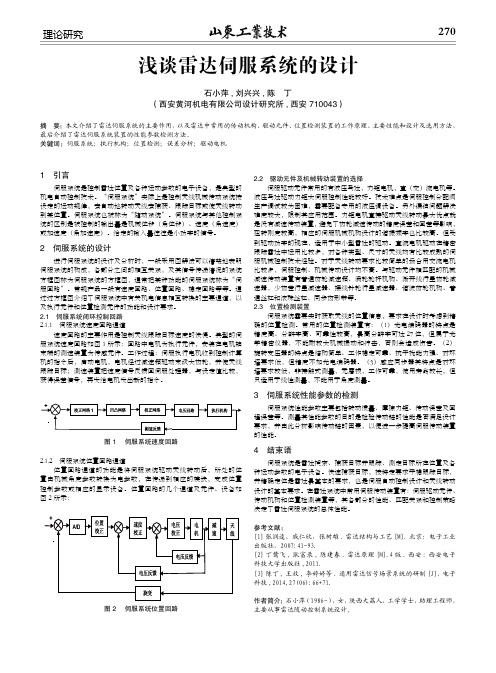
2 伺服系统的设计 进行伺服系统的设计及分析时,一般采用图解法可以清楚地表明伺服系统的构成,各部分之间的相互关系,及其信号传递情况的系统方框图称为伺服系统的方框图,通常把某种功能的伺服系统称为“伺服回路”。
常规产品一般有速度回路、位置回路、稳定回路等等。
通过过方框图介绍了伺服系统中有关机电信息相互转换的主要通道,以及执行元件和位置检测元件的功能和设计要求。
2.1 伺服系统闭环控制回路2.1.1 伺服系统速度回路通道 速度回路的主要作用是控制天线跟踪目标速度的快慢。
典型的伺服系统速度回路如图1所示:回路中电机为执行元件,安装在电机轴末端的测速装置为传感元件。
工作过程:伺服执行电机收到控制计算机的指令后,启动电机,电机经过减速箱驱动末级大齿轮,并使天线跟踪目标;测速装置把速度信号反馈回伺服处理器,与设定值比较,获得误差信号,再发给电机发出新的指令。
2.2 驱动元件及机械转动装置的选择 伺服驱动元件常用的有液压马达,力矩电机,直(交)流电机等。
液压马达驱动力矩大伺服控制性能较好。
技术难点是伺服控制分配阀生产调试较为困难,需要配备专用的液压调设备。
雷达天线伺服控制系统要点
概述用来精确地跟随或复现某个过程的反馈控制系统。
又称随动系统。
在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。
伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别。
它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统。
位置随动系统的输入和输出信号都是位置量,且指令位置是随机变化的,并要求输出位置能够朝着减小直至消除位置偏差的方向,及时准确地跟随指令位置的变化。
位置指令与被控量可以是直线位移或角位移。
随着工程技术的发展,出现了各种类型的位置随动系统。
由于发展了力矩电机及高灵敏度测速机,使伺服系统实现了直接驱动,革除或减小了齿隙和弹性变形等非线性因素,并成功应用在雷达天线。
伺服系统的精度主要决定于所用的测量元件的精度。
此外,也可采取附加措施来提高系统的精度,采用这种方案的伺服系统称为精测粗测系统或双通道系统。
通过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道。
因此可根据这个特征将它划分为两个类型,一类是模拟式随动系统,另一类是数字式随动系统。
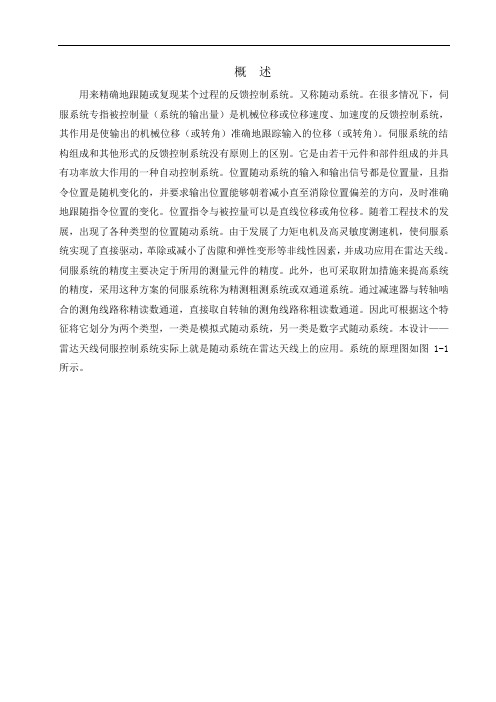
本设计——雷达天线伺服控制系统实际上就是随动系统在雷达天线上的应用。
系统的原理图如图1-1所示。
1 雷达天线伺服控制系统结构及工作原理图1-1 雷达天线伺服控制系统原理图系统的结构组成从图1-1可以看出本系统是一个电位器式位置随动系统,用来实现雷达天线的跟踪控制,由以下几个部分组成:位置检测器、电压比较放大器、可逆功率放大器、执行机构。
以上四部分是该系统的基本组成,在所采用的具体元件或装置上,可采用不同的位置检测器,直流或交流伺服机构等等。
现在对系统的组成进行分析:1、受控对象:雷达天线2、被控量:角位置m θ。
3、干扰:主要是负载变化(f 及L T )。
4、给定值:指令转角*m θ。
5、传感器:由电位器测量m θ、*m θ,并转化为U 、*U 。
雷达气象学之第一章(天气雷达系统及探测理论)

天气雷达产品的显示方式2
• RHI (距离高度显示):固定方位角,天线 做俯仰扫描,探测某方位上回波垂直结构 。坐标:R-最低仰角的斜距; H-按测高 公式计算(标准大气折射)。
天气雷达产品的显示方式3
• CAPPI (等高平面位置显示):雷达以多 个仰角(仰角逐渐抬高)做0-360 °扫描 ,得到三维空间回波资料(体扫描),利 用内插技术获得某高度的平面分布
• 基本径向速度:表示整个360度方位扫描径 向速度数据,径向速度即物体运动速度平 行与雷达径向的分量。径向速度有许多直 接的应用,可以导出大气结构,风暴结构, 可以帮助产生、调整和更新高空分析图等。 平均径向速度产品有两点局限性:一是垂 直于雷达波束的风的径向速度被表示为0; 二是距离折叠和不正确的速度退模糊。
• 散射开来的电磁波称 为散射波
入射波
散射波
• 雷达波束通过云、降水粒子时将被散射, 其中有一部分散射波要返回雷达方向,被 雷达天线接收,在雷达显示器上就反映有 回波信号。
二、散射成因
• 微粒——粒子在入射电磁波极化下作强迫 的多极振荡,从而发出次波(散射波)。
• 粒子对电磁波的散射只改变电磁波的传播 方向,没有改变能量大小。
• d≈λ的大球形质点的散射,称为米散射。
§3.2 球形水滴和冰粒的散射
• 雷达天线接收到的只是粒子散射中返回雷 达方向(即θ= 180º方向)的那一部分能量, 这部分能量称为后向散射能量。
在a 2 r 1时 的瑞利散射条件下
在a 2 r 复数1时模的平方
后(向) 散16射 44函r6数mm:22 12(2 代入 4 ( )中
• 产品生成:根据操作员的输入指令,RPG在 体积扫描的基础上产生所需产品。
雷达伺服系统设计与仿真
雷达伺服系统设计与仿真作者:陈静来源:《城市建设理论研究》2013年第29期摘要:雷达伺服系统是自动控制理论的典型应用,本文主要介绍了雷达伺服系统的论证、设计过程和方法,阐述了以传递函数为基础的经典控制理论和现代控制理论,基于对雷达伺服系统的设计研究,对伺服系统进行仿真和性能评估,总结了分析和提高伺服系统性能的方法。
关键词:伺服系统设计过程仿真和性能评估控制理论中图分类号:TN95 文献标识码:A伺服系统设计伺服系统的设计方法通常有时间响应分析方法、根轨迹法和频率响应分析法三种。
伺服系统设计的主要技术指标有:工作范围、稳定性、过渡过程品质、系统精度、动态响应能力等。
我们在实际应用过程中,可以分静态设计和动态设计两步进行,这里主要阐述动态设计。
伺服系统动态性能指标伺服系统的动态设计的目的是通过选择适当的控制算法,以使系统的闭环特性满足伺服系统的主要性能指标:稳定裕量。
伺服带宽和过渡过程品质、系统截至频率跟踪误差。
结构谐振特性。
机械传动间隙。
在实际雷达伺服系统中,采用最优控制尽可能的缩短伺服系统的过渡时间,由于最优控制基于的被控对象模型不准确,对框架角速度估计又存在误差,而PID控制对于稳态控制更占优势,因此,实际天线伺服控制中需要采用集成控制策略将最优控制器与经典PID控制器有机结合起来。
控制器交接策略:当小范围稳定时采用PID控制;大角度范围转移时采用了最优控制。
伺服系统固有环节伺服系统的固有环节主要是指执行元件及其负载,当执行元件及其负载的传递函数的输入是功率放大器的输入电压,输出是天线轴上的转角。
通常我们用动态分析仪来测试伺服系统固有环节的频率特性,通过Matlab对测得的数据进行频率特性分析。
得到系统固有环节传递函数:其中:为开环增益;为转折时间,为自然频率;为阻尼比经典PID控制设计系统模型建立伺服系统固有环节为“积分+一阶惯性+二阶振荡”形式,为保证系统的指令跟踪精度,控制器采用“一阶滞后超前+PI”形式。
雷达天线稳定平台伺服系统设计与仿真

及正 方 向。
( )甲板坐 标系 0一Xr c r,O 一 船艏 艉 1 YZ Xc 方 向,船艏 为正 ;0Y 一 垂直 甲板 平面 ,向上 为正 ; c O , 按 右手法 则 定义 。当无摇 摆时 ,目标 在 甲板 Z 一
差 ,常 采 用 机 械 稳 定 或 电气 稳 定 的方 法 来 隔离 船
De in a d S mu ain o d r tn aS a i z dP af r S r o S se sg n i lt nRa a e n tb l e lt m e v y tm o An i o
H UANG a g n Li n big
Ab t a t s r c :Th n u n e cu e y s n fs i n tem e srme tpe iin i a ay e n ti a e,te o eai g e if e c a sd b wig o hp o h aue n r cso s n lz d i hsp p r h p rt l n
} 1
● ●
量 驽
一
一
、
㈠_ _ ¨_ 『
●
,
一
一
_
_ _ I
1
0
一
f
f
●
l I _
一
~ 一
O 5
_
、
l I
l
l
_
、● _ _ _ l 一 _一 __二 _ _l . I __二 V f _ l 二 f= l = _ ● l _ ¨ .
21 0 2年
控制 方 式 的优 点 是使伺 服 电机 出于微 振状 态 ,可 以 减 小 电机 死 区 ,改 善 静 态 精 度 和 低 速 运 行 的平 稳
雷达伺服系统多电机速度同步和防滑设计探讨
雷达伺服系统多电机速度同步和防滑设计探讨摘要:雷达伺服系统是一种由电机驱动的位置控制系统,在雷达跟踪过程中,需要对伺服系统的跟踪精度、跟踪速度和稳定度等指标进行控制。
由于雷达伺服系统通常采用多个电机驱动,而且需要同时对多个目标进行跟踪,所以对雷达伺服系统的多电机速度同步和防滑设计提出了较高的要求。
目前,很多雷达伺服系统中采用了多种控制方法,如速度同步控制、PID控制等,这些方法都是从提高整个雷达伺服系统的精度和稳定性角度出发。
本文将重点从提高单个电机的调速精度、减少单个电机速度同步误差以及减少多个电机的速度不同步误差三个方面探讨多电机速度同步和防滑设计。
关键词:雷达伺服系统;多电机速度同步;防滑设计雷达伺服系统是一种用于跟踪和测量目标的电子设备。
它通过控制雷达天线和其他设备上的电机,使这些电机按照特定的信号速度同步运行,从而实现对目标的精确跟踪和测量。
在雷达伺服系统中,多电机速度同步和防滑设计是至关重要的。
如果这些设计不佳,可能会导致雷达伺服系统出现抖动、漂移等问题,影响其性能和精度。
1.同步控制技术多电机同步控制,是指在同一时刻,多个电机的转速保持同步,即各个电机的转速为同一时刻。
同步控制技术主要有基于PID的同步控制、基于自学习PID的同步控制以及基于模糊逻辑的同步控制等。
基于PID的同步控制主要有双速电动机同步控制和无极速度调节器的无速度传感器PID同步控制等;基于自学习PID的同步控制主要有自适应自调整PID、自适应比例-积分-微分(PID-derivative)、自适应调节比例-积分-微分(PID-derivative)等;基于模糊逻辑的同步控制主要有模糊自调整PID、模糊自调整比例-积分-微分(PID-derivative)等;基于模糊逻辑的同步控制主要有模糊自适应PID、模糊自适应比例-积分-微分(PID-derivative)、模糊自适应调节比例-积分-微分(PID-derivative)等。
自动控制原理课程设计-雷达天线伺服控制系统要点

雷达位置伺服系统校正班级: 0xx班学号: xx姓名: xx指导老师: x老师—2011.12雷达位置伺服系统校正一、雷达天线伺服控制系统(一) 概述用来精确地跟随或复现某个过程的反馈控制系统。
又称随动系统。
在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。
伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别。
它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统。
位置随动系统的输入和输出信号都是位置量,且指令位置是随机变化的,并要求输出位置能够朝着减小直至消除位置偏差的方向,及时准确地跟随指令位置的变化。
位置指令与被控量可以是直线位移或角位移。
随着工程技术的发展,出现了各种类型的位置随动系统。
由于发展了力矩电机及高灵敏度测速机,使伺服系统实现了直接驱动,革除或减小了齿隙和弹性变形等非线性因素,并成功应用在雷达天线。
伺服系统的精度主要决定于所用的测量元件的精度。
此外,也可采取附加措施来提高系统的精度,采用这种方案的伺服系统称为精测粗测系统或双通道系统。
通过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道。
因此可根据这个特征将它划分为两个类型,一类是模拟式随动系统,另一类是数字式随动系统。
本设计——雷达天线伺服控制系统实际上就是随动系统在雷达天线上的应用。
系统的原理图如图1-1所示。
图1-1 雷达天线伺服控制系统原理图(二) 系统的组成从图1-1可以看出本系统是一个电位器式位置随动系统,用来实现雷达天线的跟踪控制,由以下几个部分组成:位置检测器、电压比较放大器、执行机构。
以上部分是该系统的基本组成,在所采用的具体元件或装置上,可采用不同的位置检测器,直流或交流伺服机构等等。
现在对系统的组成进行分析: 1、受控对象:雷达天线; 2、被测量:角位置m θ;3、给定值:指令转角*m θ;4、传感器:由电位器测量m θ,并转化为U ;5、控制器:放大器,比例控制;6、执行器:直流电动机及减速箱。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.2 天线的分类
• 按工作性质: • 发射天线;接收天线
• 按波长: • 长波天线;中波天线;短波天线;微波天 线等
• 按天线原理: • 线天线;面天线
• 按波束扫描: • 机械扫描;电扫描(相控阵天线)
二、面天线
• 旋转抛物面天线 • 卡塞格伦(Cassegrain)天线
1、旋转抛物面天线
旋转抛物面天线是在通信、 雷达和射电天文等 系统中广泛使用的一种天线, 它是由两部分组成的,
其一:抛物线绕其焦轴旋转而成的抛物反射面, 反射 面一般采用导电性能良好的金属或在其它材料上敷以 金属层制成;
其二:置于抛物面焦点处的馈源(也称照射器)2
λ=波长; A=天线的实际面积; ρe=天线的口 径效率
3.3.5 天线的阻抗
• 天线输入阻抗:Zm=Rm+j*Xm, • 实部:电阻,功率损耗 • 虚部:阻抗,储存功率
• 天线的输入阻抗与发射机的内阻匹配时,可 得到最大输出功率;同理,接收时,接收机 可从天线获得最大输出。
The Cassegrain Antenna
• Advantages • The feed radiator is more easily supported and the antenna is geometrically compact. • It provides minimum losses as the receiver can be mounted directly near the horn.
馈源把高频导波能量转变成电磁波能量并投向抛物反 射面, 而抛物反射面将馈源投射过来的球面波沿抛物 面的轴向反射出去, 从而获得很强的方向性。
Parabolic Antennae
抛物面天线的参数选择
2、The Cassegrain Antenna
卡塞天线具有轴向尺寸短, 结构紧凑的优点,是一种性能优秀的后馈式天线。
方向叶称为主瓣,其余称为副瓣。
z
后叶
副瓣 零射方向 1
2
2θ 0 2θ 0.5
主瓣
主射方向 1
1
零射方向 2
x
y
为了定量地描述主瓣的宽窄程度,通常定义:场强为主射方向上场
强振幅的
1 2
倍的两个方向之间的夹角称为半功率角,以2θ
0.5
表示;两个
零射方向之间的夹角称为零功率角,以 2θ 0 表示。
天线的基本定理--互易性
天线总辐射功率
3.3.3 辐射效率因子(1)
• 在雷达方程中应使用功率增益,因为它包括 了由天线引入的损耗。方向性增益总是大于 功率增益
• 功率增益和方向性增益可以用辐射效率因子 ρT(<1)联系起来,其关系如下式所示:
G = ρTGD
辐射效率因子(2)
任何实际使用的天线均具有一定的损耗,天线获得的
• 在一定的条件下(实际上这些条件在雷达中 常能满足),天线的发射方向图和接收方向 图是一样的
• 发射天线和接收天线之间的唯一区别是发射 天线必须能承受较大的功率
3.3.2 增益、方向性系数、有效孔径
• 方向性增益(方向性系数):衡量天线把能量集中到 某一特定方向的能力参数
最大辐射强度 GD = 平均辐射强度 辐射强度是指:在(θ ,φ) 方向上每单位立体角内的辐射功率。
• 由于口径阻挡降低了增益,增加了副瓣,填充了零 点,因此降低了天线的性能。
• 口径阻挡的影响,可以用在无阻挡的口径的天线方 向图中减去由障碍物所产生的天线方向图的方法来 近似。
3.3.8 几种种形式的天线介绍
• 线天线 • 面天线 • 裂缝天线 • 相控阵天线
一、线天线
• 几乎任何形状的线均具有天线作用 • 例如:
输入功率,只有其中一部分功率向空间辐射,另一部分被
天线自身消耗。因此,实际天线的输入功率大于辐射功率。
天线的辐射功率Pr与输入功率 PA 之比称为天线的效率, 以η 表示,即
η
=
Pr PA
=
ρT
3.3.4 有效孔径(口径)
• 天线对入射波所呈现的有效面积的量度。增 益G和有效面积Ae之间有如下关系:
方向性天线—线天线 YAGI 八木
偶极子天线
面天线
口
口
口
径
径
径
喇叭天线
抛物面天线
透镜天线
由图可见,这类天线都是通过一个平面口径向外辐射电磁能量,因 此,这类天线称为面天线。
感性认识--几种天线实物
微带天线
喇叭天线
• 反射面天线(通信)
• 反射面天线(雷达)
相控天线
3.3 雷达天线的基本参量(特性)
用 P(θ ,φ) 表示
补充:基础知识--立体角
一个锥面所围成的空间部 分称为“立体角”。 定义立体 角是以锥的顶点为心,半径为 1的球面被锥面所截得的面积 来度量的,度量单位称为“立 体弧度”。所以一个球体的立 体角为4π
定义:Ω= S/R 2为立体角
即辐射球面上的一个面S占全部球面之比,如此称为立 体角
• 简单的有对称振子、折合振子 • 复杂的有八木天线、对数周期天线
实例:
• 单极子天线
实例
实例:八木天线
实例:(Yagi-Uda antenna)
• 由一个有源振子(一般用折合振子)、一 个无源反射器和若干个无源引向器平行 排列而成的端射式天线(见图)。
• 这种天线因日本人八木秀次和宇田新太 郎于1926年最先提出而得名,也称为八 木天线
• 辐射方向图(包括波束宽度、副瓣电平) • 增益(有效孔径) • 阻抗(电压驻波比VSWR) • 其他:极化、带宽、扫描方式
3.3.1 辐射方向图
参考:一种有效的天线三维辐射方向图计算方法
抛物面反射器天线辐射方向图
下图以极坐标绘出了典型的雷达天线的方向图。方向图中辐射最强
的方向称为主射方向,辐射为零的方向称为零射方向。具有主射方向的
• It has to provide the required frequency of target position updates. In the case of a mechanically scanned antenna this equates to the revolution(旋转) rate. A high revolution rate can be a significant mechanical problem given that a radar antenna in certain frequency bands can have a reflector with immense dimensions and can weigh several tons.
气象雷达原理与系统
电子工程学院 大气探测学院
第三章 雷达天线及伺服系统
3.1 天线的定义及作用
天线:辐射或接收无线电波的装置
天线作用:是自由空间传播和导行波(传输线)传播之间的
换能器。
发射(辐射):把高频交流电转换成空间传播的电磁波(能量 集中到所要求方向的赋形波束内)。 接收:辐射的反过程,将空间传播的电磁波转换成高频交流电 ,并通过传输线(馈线)输送给接收机。 传输线(馈线):传输微波能量或信息的装置
X波段全相参多普勒天气雷达
Functions of an Antenna
• The antenna is one of the most critical parts of a radar system. It performs the following essential functions: • It transfers the transmitter energy to signals in space with the required distribution and efficiency. This process is applied in an identical way on reception.
• 不匹配的表示:驻波比,全称为电压驻波比 VSWR(Voltage Standing Wave Ratio)
3.3.6 极化
• 极化方向定义为电场矢量的方向
3.3.7 口径阻挡
• 在天线前方的障碍物可能改变口径照射及辐射方向 图。称为口径阻挡或口径遮蔽(Shadowing)。
• 一个重要的例子是在反射器型天线中由馈源及其支 持物引起的阻挡。
• Disadvantage: • The subreflector of a Cassegrain type antenna are fixed by bars. These bars and the secondary reflector constitute an obstruction for the rays coming from the primary reflector in the most effective direction
• 卡塞格伦天线相对于抛物面天线来讲,它将 馈源的辐射方式由抛物面的前馈方式改变为 后馈方式,这使天线的结构较为紧凑,制作 起来也比较方便。另外卡塞格伦天线可等效 为具有长焦距的抛物面天线,而这种长焦距 可以使天线从焦点至口面各点的距离接近于 常数,因而空间衰耗对馈电器辐射的影响要 小,使得卡塞格伦天线的效率比标准抛物面 天线要高。
实例:对数周期天线
Logarithmic Periodical Antennae
Logarithmic Periodical Antennae
• A log-periodic antenna is a broadband narrow-beam antenna that has impedance and radiation characteristics that are regularly repetitive as a logarithmic function of the excitation frequency. Log periodic antennas are arrays and consist of a system of fed elements which are connected by a crossed double line with each other. In the transmitting case, at first the wave spreads herself practically radiationlessly on the pathogene line. The attached and on the actual wavelength obtained far too short dipoles work merely as capacitive loading. Only if the dipoles come in the range of a third of the wavelength, the irradiation starts and several dipoles following each other are then involved in this one. This radiation active zone is limited by the dipole which approximately corresponds to the half of the wavelength.