卫星天线伺服控制系统设计与开发
卫星通信天线伺服系统的离散滑模控制算法研究
L n — e HUANG i -h I Ho g k , Lns u ( o e eo l t ncE g n r g N v l nv r t o n ie r g Wu a 3 0 3 C ia C l g f e r i n i ei , aa U i s y f gn e n , h n4 0 3 , hn ) l E co n n e i E i
下降 , 鲁棒性 明显 增 强。
关键 词 : 伺服 系统 ; 星天线 ; 卫 离散 滑模控 制 ; 鲁棒性
中图分 类号 :P 7 T21 文献标识 码 : A 文章编 号 :0 0— 8 9 2 1 ) 3— 0 4— 3 10 8 2 (0 0 0 0 9 0
St dy o he Dic ee S i i g M o e Al o ih u ft s r t ld n d g rt m
・
9 4・
《 测控技术)OO年第 2 2l 9卷第 3 期
卫星通信天线伺服 系统的离散滑模控制算法研究
李洪科 , 黄麟舒
( 海军工程 大学 电子工程学 院, 湖北 武汉 403) 30 3
摘要 : 船载 卫星 天线 易受干扰 而 导致 跟 踪精 度 和 通 信 质 量 下 降。 为 改善 天 线 系统 的性 能 , 实现 了基 于 D P的 天线伺服 控制 器 , 设计 的天 线伺服 系统 中应 用基 于指数 趋近 率 的 离散 滑模 变结构控 制 算 法 , S 在 并 且 进行 了设 计分析 和 实验仿 真。 实验 结 果表 明 , 于此 算 法 , 容 易设计 满足 系统稳 定性 的 离散 控 制 基 较 器 。与传统 的 PD算 法相 比 , 算法具 有较好 的 实时适 应性 , I 该 伺服 系统 对连 续或 突加干扰 的敏 感度 大 大
移动板载天线伺服系统的辨识和控制设计

VS
结果讨论
根据实验结果,分析系统的优缺点,提出 改进措施,为后续的研究提供参考。
06
结论与展望
研究成果总结
成功建立了移动板载天线伺服 系统的数学模型,为后续的辨 识和控制设计提供了理论依据
。
通过实验验证了所设计的控制 算法的有效性和优越性,实现 了对天线的高精度跟踪和稳定
控制。
针对系统中的非线性和不确定 性,提出了有效的补偿策略, 提高了系统的动态性能和鲁棒 性。
模型建立的精度要
求
模型的精度直接影响后续控制设 计的性能,因此需要选择合适的 数学模型来表示系统。
系统模型的参数辨识方法
参数辨识的常用方法
最小二乘法、极大似然法、递推最小二乘法等。
参数辨识的步骤
先确定模型的结构,然后根据实际测试数据进行参数的估计。
参数辨识的精度要求
参数的估计精度直接影响模型的精度,因此需要选择合适的参数 辨识方法来进行参数的估计。
针对实际应用中可能出现的干 扰和扰动,设计了鲁棒的滤波 器和观测器,实现了对系统状 态的有效估计和干扰抑制。
工作展望与未来研究方向
01
进一步优化控制算法,提高系统的响应速度和跟踪精度,以满足更高 性能的伺服需求。
02
深入研究系统的稳定性和鲁棒性,完善非线性和不确定性补偿策略, 提高系统在复杂环境下的适应能力。
移动板载天线伺服系统的特点
高精度
伺服系统能够实现高精度的角 度控制,确保天线能够快速、
准确地跟踪目标。
快速响应
伺服系统具有较快的响应速度 ,能够及时响应指令信号,实 现快速跟踪。
稳定性好
伺服系统具有较好的稳定性, 能够在各种环境下保持较高的 性能表现。
5.4米卫星接收天线方案
5.4米卫星接收天线方案1 天线子系统1.1 概述天线子系统按其功能划分为四个模块:天馈模块、座架模块、伺服控制模块、天线控制模块。
系统组成框图见图所示。
(1)天馈模块采用5.4米口径标准抛物反射面天线(包括反射面、背架、馈源支撑、中心体和背架等)以及L频段水平和垂直双极化组合馈源;(2)座架模块全动方位-俯仰回转体。
方位驱动在天线的颈部,使天线总体结构简捷、可靠,安装方便,配备工作平台,外形协调、美观、实用。
可拆除挂梯,避免无关人员进入,有利于保护射频、控制和回转机构等安全。
由于回转体的上移,立柱形式可以灵活、多变、由用户根据站址的具体安装架设条件而另行确定。
主要形式为圆柱形立柱。
(3)伺服控制模块天线控制器采用分布式设计以达到最少传输线缆和最大传输距离;(4)天线跟踪方式采用程序跟踪与自动相结合方式,并利用极大值法实时对轨道预报轨迹进行实时修正;(5)跟踪精度通过设计、工艺及调试保证天线跟精度达到0.050;(6)天线控制时间校准采用GPS时间校准;(7)天线控制器与站管计算机通过网口或串口,接收站管的调度管理;(8)安全保护装置采用了三级限位:一级为软限位,二级为电气限位,第三级为机械缓冲;天线具备任意位置锁定能力。
图6.3-3天线子系统组成框图卫星接收天线需持续、稳定、可靠、高效地控制天线接收和处理卫星信号,在正常运转情况下无天线跟踪失锁、数据包丢失、丢线、噪点过多等影响卫星遥感监测业务开展的现象,天线过顶时无丢包、丢线现象。
其主要功能如下:(1)根据卫星实际飞行轨道对静止卫星进行跟踪; (2)天线具有程控跟踪、手动跟踪、收藏等功能;(3)天线监控计算机具有与站运行管理分系统通讯的能力等; (4)能满足接收FY-4卫星下传的L 频段垂直、水平信号的功能; (5)具备垂直/水平双极化同时工作的能力; (6)具备数据解码、网口进机的功能;(7)设备具备自检、测试功能、GPS 或北斗校时功能; (8)可通过监控机进行设备配置、参数设置、工作状态监视等操作;(9)对后续地球静止同步轨道航天器信号具备可扩充性,便于系统升级。
基于电压空间矢量控制的卫星天线伺服系统

比较 ,如有误差则进行位置调节算法计算 ,其计算结果作为速度给定输入 ,并进行速度调节算法计 算 ,其 计算 结果 再作 为 电流给 定输 入 ,与 电流反馈 信 号 比较 后进 行 电 流调节 ,电流 调节 信号 作为 产
生电压 向量 幅值 的依据 ,通过查 表 法查 出 P WM 的波形 分配 ,并 产生 P WM 控 制 波形 。该 P WM 波
一
速 度 调
电 — + 电
I 节一 ▲ l 节
L 电 检 + — 流 测I —
. 码I 解 ・
l
动 机
J r
旋 编 转
码 器
速 计 度算
千
图 l 伺 服 驱 动 控 制 器 框 图
系统控 制 是根据 转 速要求 ,计 算 出 当前 电机 应 处的转 子位 置并 给 定信号 ,与位 置反 馈信 号进 行
略 ,组成 电流 、速 度 和位置 的三 环 调速 控制 系统 l 。无 槽 正 弦 波 电机 的采 用 保证 了力 矩 的平稳 性 , 2 ] 进 一 步提 高 了稳 态 和瞬 态精 度 。系 统 中 电流 环 、速 度 环 、位 置 环 的 采 样 频 率 分 别 为 0 2 、l 、 . ms ms
在 卫 星天线 的伺服 控制 系统 中 ,伺 服 电机驱 动 天线 进 行 周 期 扫 描 ,为 成 像设 备 提供 成 像 数据 。
它 要求 有扫 描 周期 起始 的位 置信 号 ,同时要求 扫 描 周期非 常 精确 ,且 要 求扫 描天 线在 理 论上 应该 严 格 地 匀速旋 转 。伺 服驱 动控 制 系统 原理框 图如 图 1 示 。由于转 速精 度 要求 万分 之二 ,其他 方式 控 所 制 难 以保证 精度 ,故采 用 同步运 行方 式控 制 。系统 中 A/ D为 1 bt WM 为 1 bt 0 i,P 6 i,速度 传 感器 为 1 位 绝 对位 置式 光 电编码 器 ,而 且 由于驱 动 电机 采 用 的是 同步 电机 ,其 稳 态 转速 完 全 由施 加 在 电 6
基于FPGA的卫星天线用交流伺服系统设计研究
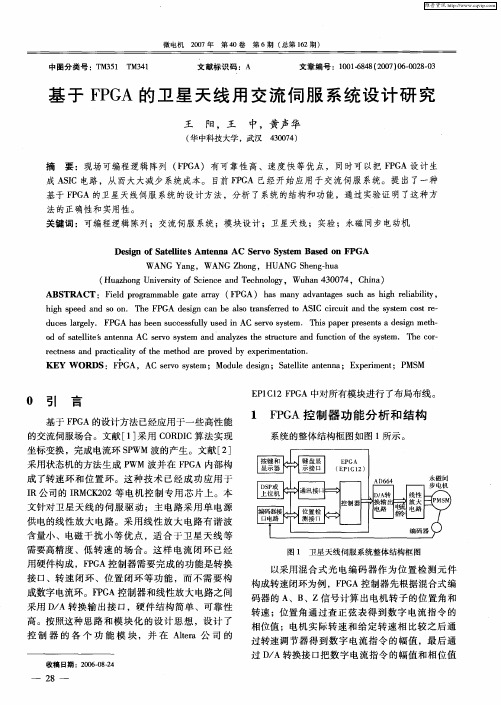
0 引 言
基于 FG P A的设计 方法 已经应用 于 一些 高 性 能 的交 流伺 服 场合 。文 献 [ ] 用 C R I 法 实 现 1采 O D C算 坐标 变换 ,完 成 电流 环 S WM波 的 产生 。文献 [ ] P 2 采用 状态 机 的方法 生 成 P WM 波 并 在 F G 内部 构 PA 成 了转速 环 和 位 置 环 。这 种 技 术 已 经 成 功 应 用 于 I 司的 IM K0 R公 R C 22等 电 机 控 制 专 用 芯 片 上 。 本 文针 对卫 星天 线 的 伺 服 驱 动 ;主 电路 采 用 单 电 源 供 电的线 性 放 大 电路 。采 用 线 性 放 大 电路 有 谐 波 含量 小 、 电磁 干 扰 小 等 优 点 ,适 合 于 卫 星 天 线 等 需 要 高精 度 、低 转 速 的场 合 。这 样 电流 闭 环 已 经 用硬 件构 成 ,F G P A控制 器 需 要 完成 的功 能 是转 换 接 口 、转 速 闭 环 、位 置 闭 环 等 功 能 ,而 不 需 要 构
h g p e n O o . T e F G d s n c n b lo ta s r d t I ic i a d t e s se c s r - i h s e d a d S n h P A e i a e as r n f r o AS C cr u t n h y tm o t e g e e d c s lr e y F G h sb e u c sf l s d i e v y tm . T i p p rp e e t e in meh u e a g l . P A a e n s c e s l u e n AC s r o s se u y h s a e r s n sa d s t - g
卫星天线伺服控制系统研究

| 工程技术与应用| Engineering Technology and Application·24·2016年10月卫星天线伺服控制系统研究景丹玉,韩 刚(91917部队,北京 102400)摘 要:在进行卫星通信过程中,天线的快速、准确、精密、稳定将会直接决定其通信质量的高低,因此需要采取措施构建一个安全、可靠、稳定的通信链路,以确保其通信过程的顺利进行。
文章对卫星天线伺服控制系统给予介绍和探讨。
关键词:卫星天线;伺服控制系统;工作原理;数学模型中图分类号:TN828.5 文献标志码:A 文章编号:2096-2789(2016)10-0024-011 卫星天线伺服控制系统简介1.1 卫星天线伺服系统的工作原理在进行卫星天线伺服系统设计过程中,要按照星载计算机预先设定的天线转向命令,来使两个方向天线转向设定的位置,从而进行数据传输任务。
其卫星天线系统常用频段主要有C、Ku、Ka等。
而卫星电视广播常选择C 频段。
Ka频段主要是向客户提供千兆比特级的数字传输、高速的卫星通信、高清数字电视以及一些个人通信业务。
以Ku频段的机载卫星天线伺服控制系统为例,它可以高精度的快速、准确的实现对目标卫星的校正,构建安全、稳定的持续信号输出链路,以实现通信服务。
天线平台和伺服平台是双系统的两种平台体制,后者具有两个不同的正交自由的天线座,分别是俯仰天线座和方位天线座。
与单平台的设计方案相比,上述结构的设计不仅可以有效提高伺服系统的带宽范围,而且还能够在一定程度上提升系统的谐振效率。
卫星天线伺服系统主要由以下几部分组成,分别是伺服电动机、限位开关、角度传感器、伺服控制器、测速电动机、PWM伺服控制驱动器、减速器等。
在伺服控制器系统中,俯仰和方位以对星开始,根据GPS数据来对计算机和卫星实现控制,并实时监测天线载机的飞行状态,以准确的得出俯仰的角度、天线的方位等信息,通过坐标换算可以得到相应的载体坐标系角度,最后借助一定的手段进行方位闭环的调整,可以使天线准确对准卫星,从而有效的实现卫星通信。
车载卫星天线伺服控制系统的研究
e a t .T e a t n a c n r l rp o i e u c in fso a e x cl h n e n o t l r vd s f n t s o tr g ,me r ,a d c n a t -h n e s t l e . I c n y oe o mo y n a uo c a g at i s t a et
董 颢, 峻, 肖 柴小 波 , 晓娟 郑
( 汉理 工大 学机 电工 程学 院 , 湖北 武 汉 40 7 ) 武 30 0 摘 要 : 用 简单 实用可 靠的机 械 系统 , 利 综合 运 用 电子 罗盘 、 置传 感 器等现代 传 感装置 , 用单 片机 的 位 利 优 良控制 功 能 , 计 了车载 卫 星天 线伺服 控 制 系统 , 设 实现 了快速 准确 对 星。天 线控 制 器有储存 记 忆 自动
星 就成 为衡 量车 载 卫 星站 应 用 性 能 的 重要 指 标 之 一 。
与之通信 的卫星 , 建立通信信道 的过程。对于地球同 步卫 星来 讲 , 只要 地球 站位 置确定 以后 , 节 天线 的俯 调 仰 角和 方位 角就 可 以完 成 对 星 , 此基 础 上 再 调 整 馈 在 源极 化 方 向就 可 以使 天线 系统效 果达 到最 佳 … 。 自动对星是指在没有专用仪器和专业人员参与的 情况 下 , 根据使 用 者输 入 的对星需 求信 息 , 自动采集 对
0 引 言
近 年来 , 采用ห้องสมุดไป่ตู้小 口径 天 线 的车 载 卫 星 天 线得 到越
非 常适合 部 队 、 野外 作业 及 流动单 位使 用 。
: :
・
1 自动对 星原 理
所 谓对 星 , 是将 卫 星 天 线 的 主 波束 中心 对 准 要 就
基于单片机的卫星天线伺服系统
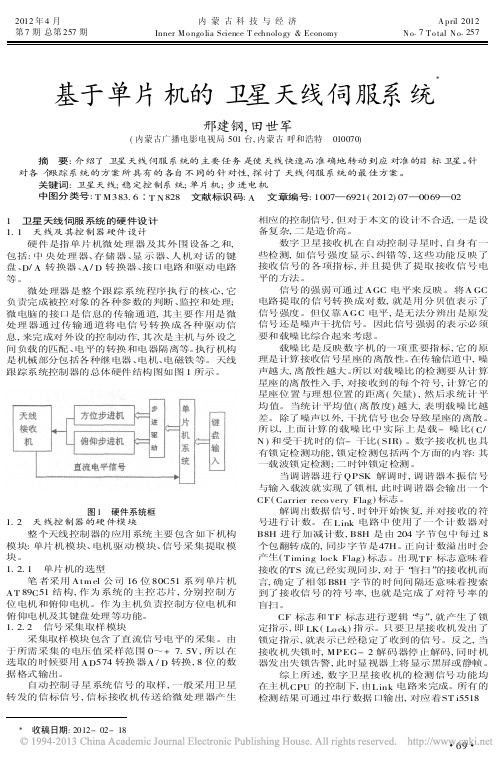
2012年4月内蒙古科技与经济A pril 2012 第7期总第257期Inner M o ngo lia Science T echnolo gy &Economy N o .7T o tal N o .257基于单片机的卫星天线伺服系统邢建钢,田世军(内蒙古广播电影电视局501台,内蒙古呼和浩特 010070) 摘 要:介绍了卫星天线伺服系统的主要任务是使天线快速而准确地转动到应对准的目标卫星。
针对各个跟踪系统的方案所具有的各自不同的针对性,探讨了天线伺服系统的最佳方案。
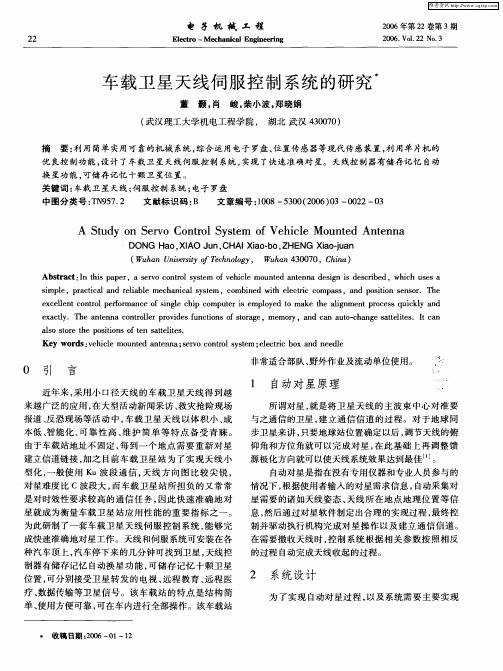
关键词:卫星天线;稳定控制系统;单片机;步进电机 中图分类号:T M 383.6∶T N 828 文献标识码:A 文章编号:1007—6921(2012)07—0069—021 卫星天线伺服系统的硬件设计1.1 天线及其控制器硬件设计硬件是指单片机微处理器及其外围设备之和,包括:中央处理器、存储器、显示器、人机对话的键盘、D /A 转换器、A /D 转换器、接口电路和驱动电路等。
微处理器是整个跟踪系统程序执行的核心,它负责完成被控对象的各种参数的判断、监控和处理;微电脑的接口是信息的传输通道,其主要作用是微处理器通过传输通道将电信号转换成各种驱动信息,来完成对外设的控制动作,其次是主机与外设之间负载的匹配、电平的转换和电器隔离等。
执行机构是机械部分包括各种继电器、电机、电磁铁等。
天线跟踪系统控制器的总体硬件结构图如图1所示。
图1 硬件系统框1.2 天线控制器的硬件模块整个天线控制器的应用系统主要包含如下机构模块:单片机模块、电机驱动模块、信号采集提取模块。
1.2.1 单片机的选型笔者采用At m el 公司16位80C51系列单片机AT 89C 51结构,作为系统的主控芯片,分别控制方位电机和俯仰电机。
作为主机负责控制方位电机和俯仰电机及其键盘处理等功能。
1.2.2 信号采集取样模块采集取样模块包含了直流信号电平的采集。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Design and Development of Servo Control System for Satellite Antenna
学科专业:控制工程 研 究 生:张振江 指导教师:王一晶 副教授
天津大学电气与自动化工程学院 二零一三年 十一月
独创性声明
本人声明所呈交的学位论文是本人在导师指导下进行的研究工作和取得的 研究成果,除了文中特别加以标注和致谢之处外,论文中不包含其他人已经发表 或撰写过的研究成果, 也不包含为获得 天津大学 或其他教育机构的学位或证 书而使用过的材料。 与我一同工作的同志对本研究所做的任何贡献均已在论文中 作了明确的说明并表示了谢意。
KEY WORDS:Satellite Antenna, Servo System, PID Control Algorithm, Active
Disturbance Rejection Control Technique
II
目
录
目
录 ......................................................................................................................III 1.1 课题研究的背景 ..............................................................................................1 1.2 机载卫星天线伺服系统的研究现状 ..............................................................2 1.3 论文的主要内容 ..............................................................................................3
学位论文作者签名: 签字日期: 年 月 日
导师签名: 签字日期: 年 月 日
摘 要
随着社会的发展,人们对卫星通信的需求越来越大,而实现卫星通信的关键 在于天线能够准确的对准目标卫星。本文以某 Ku 频段的机载卫星天线为基础, 对卫星天线的伺服系统进行研究,目的是使天线能够快速、稳定、准确的对准目 标卫星,以建立稳定、可靠的通信链路。 本文首先对卫星天线伺服系统的原理进行了介绍,并分别对伺服系统的各个 组成部分做了详尽的描述。然后通过对伺服控制系统各个组成元器件的建模,推 导出了伺服系统双闭环位置回路的数学模型,并对环路进行分析。最后对数字 PID 控制器进行了介绍和分析。 本文详述了伺服控制系统控制器的硬件和软件的设计和具体实现方法。硬件 部分主要介绍了轴角编码解码电路、 限位检测电路、 电源电路和差分放大器电路。 软件部分介绍了软件的开发环境,对主程序及各子程序模块进行了讲解,并对数 字 PID 控制算法进行了研究。 对伺服系统的性能进行验证和分析, 并给出了测试 的结果。 最后通过对传统 PID 控制器的分析,引出并介绍了自抗扰控制技术,对自抗 扰控制器的组成部分进行了详细的介绍。 然后讨论了基于自抗扰技术的卫星天线 伺服系统控制器的设计,给出了控制器设计方案,并进行 Matlab 仿真验证。
关键词:卫星天线 伺服系统 PID 控制算法 自抗扰控制技术
I
ABSTRACT
With the development of society, people have a growing need for satellite communication. Aligning the antenna accurately to the target satellite is a core technology of the whole satellite system. In this thesis, the design and development of a servo system based on Ku frequency band airborne satellite antenna is investigated. The purpose of the research is to drive the antenna aiming at the target satellite rapidly, stably and accurately; so that a stable and reliable satellite communication link can be established. First, the basic principles of the servo system are introduced, and the main compositions of the system are described in detail. Then after modeling each main components of the servo system, a double closed-loop mathematical model of position feedback loop is presented with some analysis applying to the model. The control theory of digital PID is particularly addressed. Second, we make a detailed description of the design and implementation for the hardware and software of the servo controller. The part of hardware design mainly includes angle coding-decoding circuit, position restriction circuit, power source circuit, differential amplifier circuit. The software development environment is then presented, and the main program and subprogram are discussed. And the digital PID control algorithm is also given. We also make the testing and analyzing the performance of the servo system as well as the corresponding results. Finally, we analyze the traditional PID control algorithm, and then turn to the active disturbance rejection control technique (ADRC). In this section, we carry on the detailed discussion of the main part of ADRC. Subsequently, the design of satellite antenna servo controller based on ADRC technique is studied, the design method of the controller is proposed. In addition, we use Matlab to simulate the controller designed by ADRC and illustrate the effectiveness of the above results.
第一章 绪论 ..................................................................................................................1
第二章 卫星天线伺服控制系统简介 ..........................................................................4 2.1 卫星天线伺服系统的原理及组成 ..................................................................4 2.1.1 伺服电机 ................................................................................................4 2.1.2 伺服驱动器 ............................................................................................5 2.1.3 轴角编码解码 ........................................................................................6 2.1.4 限位开关 ................................................................................................8 2.2 卫星天线伺服系统模型的建立 ......................................................................9 2.2.1 直流伺服电机的数学模型 ....................................................................9 2.2.2 PWM 驱动器的数学模型 ....................................................................10 2.2.3 测速电动机和轴角测量装置 .............................................................. 11 2.3 位置伺服系统环路分析 ................................................................................12 2.3.1 速度环调节器 ......................................................................................13 2.3.2 位置环调节器 ......................................................................................13 2.4 卫星天线伺服系统控制算法 ........................................................................14 2.4.1 数字 PID 控制器 .................................................................................14 2.5 本章小结 ........................................................................................................17 第三章 卫星天线伺服控制系统硬件设计 ................................................................18 3.1 伺服系统硬件结构 ........................................................................................18 3.2 伺服控制器芯片选取 ....................................................................................18 3.3 轴角编码解码电路 ........................................................................................20 3.4 限位检测电路 ................................................................................................21 3.5 电源电路 ........................................................................................................23 3.6 差分放大器电路 ............................................................................................24