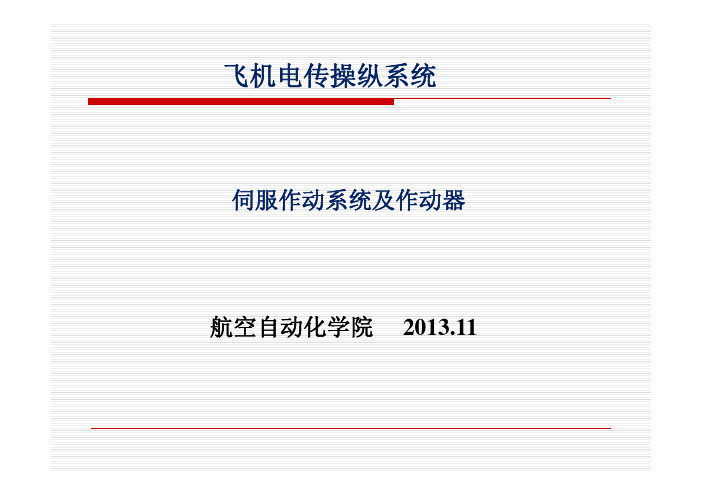
第六章电气伺服系统
BKSC-47P5GA伺服控制器说明书 第六章 参数说明
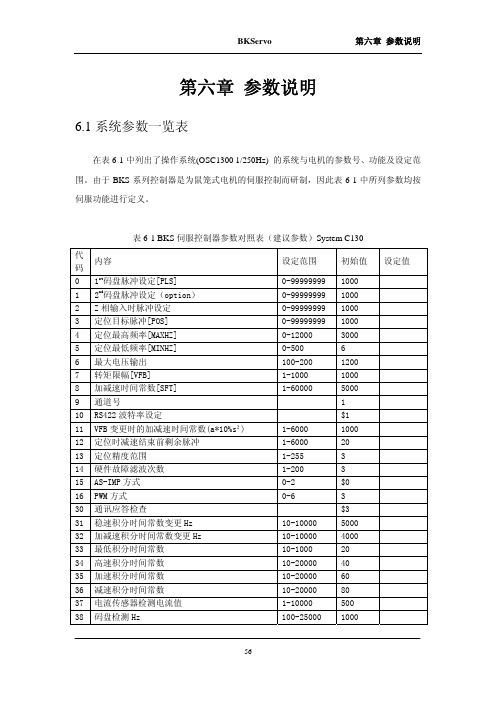
第六章参数说明6.1系统参数一览表在表6-1中列出了操作系统(OSC1300 1/250Hz) 的系统与电机的参数号、功能及设定范围。
由于BKS系列控制器是为鼠笼式电机的伺服控制而研制,因此表6-1中所列参数均按伺服功能进行定义。
表6-1 BKS伺服控制器参数对照表(建议参数)System C130代内容 设定范围 初始值 设定值 码0 1st码盘脉冲设定[PLS] 0-99999999 10001 2nd码盘脉冲设定(option) 0-99999999 10002 Z相输入时脉冲设定 0-99999999 10003 定位目标脉冲[POS] 0-99999999 10004 定位最高频率[MAXHZ] 0-12000 30005 定位最低频率[MINHZ] 0-500 66 最大电压输出 100-200 12007 转矩限幅[VFB] 1-1000 10008 加减速时间常数[SFT] 1-60000 50009 通道号 110 RS422波特率设定 $111 VFB变更时的加减速时间常数(a*10%s²) 1-6000 100012 定位时减速结束前剩余脉冲 1-6000 2013 定位精度范围 1-255 314 硬件故障滤波次数 1-200 315 AS-IMP方式 0-2 $016 PWM方式 0-6 330 通讯应答检查 $331 稳速积分时间常数变更Hz 10-10000 500032 加减速积分时间常数变更Hz 10-10000 400033 最低积分时间常数 10-1000 2034 高速积分时间常数 10-20000 4035 加速积分时间常数 10-20000 6036 减速积分时间常数 10-20000 8037 电流传感器检测电流值 1-10000 50038 码盘检测Hz 100-25000 100039 码盘错误脉冲 1-200 1060 励磁电流的偏置值(im) 5-40 3061 比例增益 P(*8) 1-120 8062 积分增益 I 1-100 10063 电机转差 10-6000 65064 K2增益 1-500 40065 0Hz电流增益% 0-100 6066 电流增益 1-150 5067 码盘时间常数 100-2000 2068 低速转差DOWN% 10-90 5069 高速转差UP% 0-50 370 转差变换点 1-20000 500071 码盘补偿值 80072 S曲线时间常数 10-10000 2073 比例增益变更加减速度 1-2000 100074 积分时间常数变更加减速度 1-2000 100075 积分时间常数增益 1-100 076 码盘错误最大值 077 过载极限值 1-250 10078 转矩过载值 50-1000 80079 电流增益变换点 1-20000 500080 2nd码盘脉冲增益 *a 1-10000 10081 2nd码盘脉冲增益 /b 1-10000 10090 显示位4---0显示内容的地址 积分值 $F00491 显示位9---5显示内容的地址 电机电流值 $F00A92 程序自动启动设定 0or 293 or 6413$093 程序自动启动开始行数 0-1023 094 小数点显示方式设定 0-6 095 外部AD0、AD1时间常数(0.1ms单位) 1-10000 5096 RESET选择 1-$8000 $097 显示方式设定 0-6 0显示状态:A键 输入C6,C5,C4正在执行地址: B键 输出C1,C0正在执行行数:C键 HZSD HZFD键 超调PLS POS-PLSE键 实际扭矩 过载F键 用户(积分值 电机电流值)1CHR键 HZF HZF2 用户参数:从$EF50开始48步INC键:数据存储时,显示参数号自动增加DEC键:数据存储时,显示参数号不自动增加NO.10设置成$61时,为偶校验9600波特率。
第六章进给伺服系统

二、步进电机的主要性能指标 1. 步距角和步距误差 每输入一个脉冲电信号,步进电机转子转过的角度成为步距 角。 步距角和步进电机的相数、通电方式及电机转子齿数的 360 关系如下: = KmZ (6-1) 式中 —步进电机的步距角; m—电机相数; Z—转子齿数; K—系数,相邻两次通电相数相同,K=1; 相邻两次通电相数不同,K=2。 同 一 相 数 的 步 进 电 机 可 有 两 种 步 距 角 , 通 常 为 1.2/0.6 、 1.5/0.75 、 1.8/0.9 、 3/1.5 度等。步距误差是指步进电机运行 时,转子每一步实际转过的角度与理论步距角之差值。步 距误差直接影响执行部件的定位精度及步进电机的动态特 性。大小由制造精度、齿槽的分布及定子和转子间气隙不 均匀等因素造成。
步进电机是将电脉冲信号变换成角位移或线位移 的一种机电式数模转换器。在结构上分为定子和 转子两部分,现以图6-5所示的反应式三相步进电 机为例加以说明。定子上有六个磁极,每个磁极 上绕有励磁绕组,每相对的两个磁极组成一相, 分成A、B、C三相。转子无绕组,它是由带齿的铁 心做成的。步进电机是按电磁吸引的原理进行工 作的。当定子绕组按顺序轮流通电时,A、B、C三 对磁极就依次产生磁场,并每次对转子的某一对 齿产生电磁引力,将其吸引过来,而使转子一步 步转动。每当转子某一对齿的中心线与定子磁极 中心线对齐时,磁阻最小,转矩为零。如果控制 线路不停地按一定方向切换定子绕组各相电流, 转子便按一定方向不停地转动。步进电机每次转 过的角度称为步距角。
进给伺服系统的作用:接受数控装置发出 的进给速度和位移指令信号,由伺服驱动装置 作一定的转换和放大后,经伺服电机(直流、 交流伺服电机、功率步进电机等)和机械传动 机构,驱动机床的工作台等执行部件实现工作 进给或快速运动。 数控机床的进给伺服系统与一般机床的进给系 统有着本质的区别:能根据指令信号精确地控 制执行部件的运动速度与位置,以及几个执行 部件按一定规律运动所合成的运动轨迹。如果 把数控装置比作数控机床的“大脑”,是发布 “命令”的指挥机构,那么伺服系统就是数控 机床的“四肢”,是执行“命令”的机构,它 是一个不折不扣的跟随者。
伺服控制(电液伺服系统 )课件
(二)系统的闭环刚度特性
闭环惯性环节转折频率的无因次曲线
17
闭环振荡环节固有频率无因次曲线
当h和Kv/h较小时
nc h
18
当h和Kv/h较小时
2 nc 2 h — Kv / h
闭环振荡环节阻尼系数无因次曲线
19
系统频宽主要受h和h的影响 和限制,应适当提高h和 h , 但过大的 h会降低nc,影响响
应速度。
电液位置控制系统闭环频率特性曲线
4)只有在工作频率接近谐振频率h时才有稳定性问题。当工作频率 接近h时,负载压力且也将接近ps了,也就是说压力趋于饱和,Kc变得很
大,阻尼系数比较高。
14
P116页使系统满足一定稳定要求的参数估算
由于以上几点原因,估算时一般可用
Kv
h
3
电液位置伺服系统难于得到较大的幅值稳定裕量Kg,而相位稳定
裕量 易于保证。
6
位置比较用电压比较代替 缸
电液伺服阀 液压能源
样板 给定
xi 位移 ei 比较eg 电伺服 I
传感器
- 放大器
ef
力矩 马达
液压 放大元件
扰动
液压 xp
执行件
位移 传感器1
A 双传感器阀控位置控制系统
7
由计算机图 形代替样板
程序 ei 比较eg
给定
-
ef
电液伺服阀 液压能源
电伺服 i 放大器
力矩 马达
11
将电液伺服阀看成比例环节
Kv
Ke Kd Ka Ksv iDm
TL
K V ce
iD K m
4
s
t
1
e ce
i +
伺服系统培训课程设计
伺服系统培训课程设计一、课程目标知识目标:1. 学生能理解伺服系统的基本概念,掌握其工作原理和组成结构。
2. 学生能掌握伺服系统中关键参数的计算方法,如转速、扭矩、精度等。
3. 学生了解不同类型伺服系统的特点及其适用场合。
技能目标:1. 学生能运用所学知识分析和解决实际伺服系统应用中的问题。
2. 学生具备设计简单伺服系统的能力,能根据需求选择合适的组件并进行调试。
3. 学生能熟练使用相关工具和设备进行伺服系统的安装、调试和维护。
情感态度价值观目标:1. 培养学生关注工程技术发展的意识,激发对伺服系统及其应用的兴趣。
2. 培养学生严谨、细致、负责的工作态度,增强团队协作和沟通能力。
3. 培养学生具备安全意识,遵循相关操作规程,确保伺服系统应用的安全可靠。
本课程针对高年级学生,结合学科特点,注重理论与实践相结合,以实际应用为导向。
课程目标旨在使学生掌握伺服系统的基础知识,具备实际操作和问题解决能力,同时培养良好的职业素养和安全意识。
通过课程学习,为学生未来在自动化、机器人等相关领域的发展奠定基础。
二、教学内容1. 伺服系统概述:介绍伺服系统的基本概念、发展历程、应用领域及发展趋势。
- 教材章节:第一章 伺服系统概述- 内容列举:伺服系统的定义、分类、工作原理。
2. 伺服系统组成与原理:分析伺服系统的组成结构,讲解各部分功能及相互关系。
- 教材章节:第二章 伺服系统的组成与原理- 内容列举:驱动器、执行器、反馈元件、控制器等组成部分及其工作原理。
3. 伺服系统关键参数计算:学习伺服系统中转速、扭矩、精度等关键参数的计算方法。
- 教材章节:第三章 伺服系统关键参数计算- 内容列举:转速与扭矩的计算、精度分析、系统稳定性分析。
4. 伺服系统类型及特点:介绍不同类型伺服系统的特点、优缺点及适用场合。
- 教材章节:第四章 伺服系统类型及特点- 内容列举:步进伺服系统、交流伺服系统、直流伺服系统等。
5. 伺服系统应用与案例分析:分析伺服系统在实际应用中的案例,提高学生的问题解决能力。
伺服系统工作原理解读
第一部分:伺服系统的工作原理伺服系统(servo system)亦称随动系统,属于自动控制系统中的一种,它用来控制被控对象的转角(或位移),使其能自动地、连续地、精确地复规输入指令的变化规律。
它通常是具有负反馈的闭环控制系统,有的场合也可以用开环控制来实现其功能。
在实际应用中一般以机械位置或角度作为控制对象的自动控制系统,例如数控机床等。
使用在伺服系统中的驱动电机要求具有响应速度快、定位准确、转动惯量较大等特点,这类专用的电机称为伺服电机。
其基本工作原理和普通的交直流电机没有什么不同。
该类电机的专用驱动单元称为伺服驱动单元,有时简称为伺服,一般其内部包括转矩(电流)、速度和/或位置闭环。
其工作原理简单的说就是在开环控制的交直流电机的基础上将速度和位置信号通过旋转编码器、旋转变压器等反馈给驱动器做闭环负反馈的PID调节控制。
再加上驱动器内部的电流闭环,通过这3个闭环调节,使电机的输出对设定值追随的准确性和时间响应特性都提高很多。
伺服系统是个动态的随动系统,达到的稳态平衡也是动态的平衡。
全数字伺服系统一般采用位置控制、速度控制和力矩控制的三环结构。
系统硬件大致由以下几部分组成:电源单元;功率逆变和保护单元;检测器单元;数字控制器单元;接口单元。
相对应伺服系统由外到内的"位置"、"速度"、"转矩" 三个闭环,伺服系统一般分为三种控制方式。
在使用位置控制方式时,伺服完成所有的三个闭环的控制。
在使用速度控制方式时,伺服完成速度和扭矩(电流)两个闭环的控制。
一般来讲,我们的需要位置控制的系统,既可以使用伺服的位置控制方式,也可以使用速度控制方式,只是上位机的处理不同。
另外,有人认为位置控制方式容易受到干扰。
而扭矩控制方式是伺服系统只进行扭矩的闭环控制,即电流控制,只需要发送给伺服单元一个目标扭矩值,多用在单一的扭矩控制场合,比如在小角度裁断机中,一个电机用速度或位置控制方式,用来向前传送材料,另一个电机用作扭矩控制方式,用来形成恒定的张力。
伺服作动器
(6)电动静液作动器保留传统液压作动系统很多优点,具有 和传统阀控作动系统一样的舵面接口,对现有系统的结构 改动量小,技术风险小,更受飞机制造者的偏爱。
动控制面(舵面)的偏转,从而实现飞行控制系统对飞机飞
行进行控制的目的。 具备对自身工作状态检测、故障处理及状态申报等能力。
典型伺服作动系统比较:
1、机电作动器EMA
机电作动系统:通过控制电动机或电器运行直接或间接 地控制负载运动,实现目标位置伺服控制的一类系统的 总称。 机电作动系统在飞机飞控中应用,极大提升飞机的可靠 性、可维修性和灵活性,减轻飞机重量及燃油消耗。相 较于维修费用高而又易受损伤的传统类型作动系统,其 安全性能和经济性能都有较大的优势。
机电作动系统的关键技术
(1)电机技术 考虑飞行器应用,随着电磁材料的发展和可靠性、可控 性的要求不断提高,飞行器中EMA 采用电动机主要有
感应电动机、永磁同步电动机、无刷直流电动机和开关 磁阻电动机,并日益倾向高速钐钴永磁无刷直流电动机。
目前,EMA 中除了采用多台电机构成余度外,还可以
采用高可靠性电机:电气多余度电机、机械多余度电机 和容错电机等,通过各种形式绕组备份来实现高可靠性。
气动、液压和电 动作动器综合性 能比较如表所示
气动作动系统结构:电气伺服马达、电磁阀、螺杆、轴承 和导杆等组成。
特点 : 电气伺服马达驱动电磁气动阀,控制活塞两侧气缸 内高压空气的进入与排出。
思考题: 1、伺服作动系统分类及其各自的特点?(EMA,EHA) 2、作动系统的频宽定义? 3、作动系统的分辨率是什么? 4、作动系统的动态刚度定义?
第六章:伺服系统(6学时)PPT课件
四、常见三种电气伺服驱动装置的特点:
1、步进电机(Stepping Motor)
✓转角与数字脉冲成比例,可构成直接数字控制 ✓构成廉价的开环系统 ✓控制系统控制较简单
2、直流伺服电机(DC Servo Motor)
✓高响应、高功率密度 ✓可实现高精度的数字控制 ✓换向器件需维护
3、交流伺服电机(AC Servo Motor)
对于直线移动的工作台,折算到丝杠轴的转动惯量为:
J
M
(
p
2
)2
丝杠轴折算到电机轴的转动惯量为:
J
1 i2
J
z
2
Js
p M(
2
)
2
因此,折算到电机轴的等效转动惯量Jd为:
Jd
Jm
J z1
1 i2
J
z
2
Js
M
(
p
2
)
2
对于齿轮齿条传动的工作台,折算到驱动轴的转动惯量为:
J M R 2 R为齿轮分度圆半径
TN
Jm
d
dt
因此,比功率为:
dP dt
TN2
/
Jm
2、快速性好;调速范围宽(1:1000以上);适应启停频繁的工作要 求等。
6
§ 6.2 步进电机伺服驱动
一、步进电机工作原理
步进电机是将电脉冲信号转变为角位移的电气执行元件,电机绕组每接 受一个脉冲,转子转过相应的角度(即步距角),低频率运行时,明显 可见电机轴是一步一步转动的,故称为步进电动机。
适用范围:空压伺服、步进电机伺服、 交流直流伺服、液压伺服
2
三、伺服系统基本要求
精度 指输出量复现输入指令信号的精确程度,通常用稳态误差表示
电气伺服系统

• 从上式可知,步距角与相数及齿数有关,要想获得小 的步距角的话,必须增大相数或齿数。但是,相数越
多的话,它的驱动电源就越复杂,并且成本也越高,
一般的步进电动机做成二相、三相、四相、五相或六 相。因此,减小步距角的根本方法是增加转子齿数z。
3) 测速发电机
测速发电机将转速转变为电压信号,广泛用于速度和位置控制系统中.
嵌 • 有两套相差90度电角度
的绕组:激磁绕组WF,控 制绕组WC; • 这两套绕组分别由两个 电源供电.
接线图
两相交流伺服电动机的结构
• (2)转子:
• 分为鼠笼型和杯型两种.
• (1)鼠笼型转子作得细而 长,转子导体采用高电阻 率的材料.用于小功率的 自动控制系统.产品型号 SL系列.
• (2)空心杯型转子作成薄 壁圆筒形,放在内外定子 之间.用于要求运行平滑 的系统.产品型号SK系列.
▪相位误差:一般要求不超过1度-2度.
▪灵敏度:交流测速发电机的灵敏度比较 低.
输出特性的线性度
2.直流测速发电机
• 1)基本原理 • 电气原理如右图所示,它是一
种测量转速用小型他激直流
U a发 为0 :电 机E .空C载e时n ,电枢两端电压
Ua Cen /(1Ua /U L )
▪2)输出特性:负载越小,转速越高,输出特 性曲线弯曲越厉害. ▪3)性能: 没有剩余电压,特性钭率比异步机大; 有换向器和电刷,换向火花产生无线电干 扰,输出特性不稳定.
பைடு நூலகம்
14 23
B
CB
CB
CB
C
A'
A'
A'
A'
(a)
(b)
(c)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 4.参数:输出功率1-600W.
2).交流伺服电动机 (1)结构
• (1)定子: • 定子由硅钢片叠成; • 在定子铁心的内圆表面
嵌 • 有两套相差90度电角度
的绕组:激磁绕组WF,控 制绕组WC; • 这两套绕组分别由两个 电源供电.
接线图
两相交流伺服电动机的结构
• (2)转子:
• 分为鼠笼型和杯型两种.
转子静止时
转子转动时
3) 交流测速发电机使用中的几个问题 :
• (1)主要技术指标
• 剩余电压:测速发电机转速为 零时的输出电压.它会使控制
系统误动作.
• (2)使用中应注意的问题:
• 输出特性的线性度,
• 温度变化的影响,可加温度补 偿装置.
由•非线线性性引误起差的误: 差.一般系统要求1% -2%;精密系统要求0.1%-0.25%.
越高,电动机转速越高.
不同控制电压下的机械特性
应用举例
• (1)参数:交流伺服电动机输出功率为0.1-100W(再大则 用直流伺服电动机); 电源频率50-400Hz.
• (2)应用:雷达天线的旋转控制;飞机驾驶盘的控制;流体 阀门开关控制,
应用方框图
4步进电动机
是将电脉冲信号转换成角位移或直线位移的一种执行元 件
▪相位误差:一般要求不超过1度-2度.
▪灵敏度:交流测速发电机的灵敏度比较 低.
输出特性的线性度
2.直流测速发电机
• 1)基本原理 • 电气原理如右图所示,它是一
种测量转速用小型他激直流
U a发 为0 :电 机E .空C载e时n ,电枢两端电压Uຫໍສະໝຸດ Cen /(1Ua /U L )
▪2)输出特性:负载越小,转速越高,输出特 性曲线弯曲越厉害. ▪3)性能: 没有剩余电压,特性钭率比异步机大; 有换向器和电刷,换向火花产生无线电干 扰,输出特性不稳定.
14 23
B
CB
CB
CB
C
A'
A'
A'
A'
(a)
(b)
(c)
(d)
(3)通电方式
• 控制绕组每改变一次通电方式,称为一拍,每 一拍转子所转过的角度称为一个步距角β。步 进电动机的通电方式有三种。对于三相反应式 步进电动机来说,每次只有一相绕组单独通电, 如A→B→C→A,控制绕组每换接三次构成一 个循环,这种方式称为三相单三拍;若每次有 两相绕组同时通电,如AB→BC→CA→AB, 每次循环换接三次,这种方式称为三相双三拍; 若单相通电和两相通电轮流进行,如 A→AB→B→BC→C→CA→A,这种方式被称 为三相六拍。
• (1)鼠笼型转子作得细而 长,转子导体采用高电阻 率的材料.用于小功率的 自动控制系统.产品型号 SL系列.
• (2)空心杯型转子作成薄 壁圆筒形,放在内外定子 之间.用于要求运行平滑 的系统.产品型号SK系列.
杯型转子伺服电动机结构图 激磁绕组1;控制绕组2;内定子3;
外定子4;转子5
(2).基本工作原理
• 从上式可知,步距角与相数及齿数有关,要想获得小 的步距角的话,必须增大相数或齿数。但是,相数越
多的话,它的驱动电源就越复杂,并且成本也越高,
一般的步进电动机做成二相、三相、四相、五相或六 相。因此,减小步距角的根本方法是增加转子齿数z。
3) 测速发电机
测速发电机将转速转变为电压信号,广泛用于速度和位置控制系统中.
第六章:电气伺服系统
• 控制电机的主要作用是用来完成信息的 传递与交换,而不是进行能量转换.
6.1伺服系统的基本结构 1) 直流伺服电动机
• 1.基本结构:与普通他激 直流电动机相同.(有换向 器)
• 2.分类:电磁式(他激式);
•
永磁式,
• 3.电气原理图:如右图.其 中(a)为电磁式(b)为永磁 式.
• 1.异步(交流)测速发电机
• 1) 结构特点:定子上有两 套互差90度电角度的激 磁绕组WF和输出绕组 WC;转子为空心杯形.
• 2) 工作原理:杯形转子可 以看成一个导条非常多 的鼠笼转子.在激磁电压 一定的情况下,当输出绕 组的负载很小时,测速发 电速n机成的正输比出: 电压U0与转
•
U0=Kn
(4)小步距角步进电动机
• 步进电动机无论采用哪种通电方式,步距角都太大,无法满足生 产中对精度的要求,在实际应用中一般采用小步距角的步进电动
机。设转子齿数为z,定子相数为m,则齿距角τ和步距角β为:
• Τ=360/ z
β=360/K m z
• 其中K为状态系数,对于单相轮流通电方式和双相轮流 通电方式来说,K=1,而对于单双相轮流通电方式来说, K=2。
• (1)分类与结构
• 步进电动机分为反应式,
永磁式,和混合式三种.
C'
A B'
• 三相反应式步进电动机 由定子和转子两个部分 构成.
• 右图中,定子有6个磁极,
B
C
两个相对的磁极组成一
相;转子上有均匀分布的4 个齿.
A'
(2)步进电动机的工作原理
由环形分配器送来的脉冲信号,对定子绕组轮流通电。设相序为A→B→C→A。 当A相控制绕组通电, 而B、C相不通电时,步进电动机的气隙磁场与A相绕组轴线重合, 而磁力线总是力图从磁阻最小的路径通过, 故电动机转子受到一个反应转矩(静转矩)的作用,在此转矩的作用下, 使转子的齿1和齿3旋转到与A相绕组轴线相同的位置上,如图(a)所示,
• 两相绕组WF和WC分别 通入频率相同的交流电, 产生旋转磁场,使伺服电 动机起动.
• 取消WC后,要防止自转.
• (3).消除自转现象的措施 • 加大转子电阻.如: • 采用薄壁杯形转子. • 鼠笼条用高阻材料黄铜
转子电阻不同时的机械特性
(4).交流伺服电动机的特性和应用
• 控制方法;有三种. • 幅值控制,相位控制,幅-相控制 • 幅值控制原理图:控制电压Uc
然后B相通电如图(b)所示,转子在空间沿逆时针方向转过30度,转子前进一步.
同理,C相通电时,转子转到图©所示位置;D相通电时,转子转到图(d)所示位置.
按A-B-C-A顺序不断地接通和断开控制绕组,电动机便一步一步地转动.
A
A
A
A
C'
B' C'
B' C'
B' C'
B'
21 34
1 24
3
1 24
3