基于单片机AT89C52的步进电机的控制器设计
基于at89s52单片机的电机控制系统设计

基于AT89S52单片机的电机控制系统设计介绍在现代工业领域,电机控制系统是至关重要的一部分。
无论是在生产线上运输原材料,还是在汽车中驱动发动机,都需要一个可靠且精确的电机控制系统。
本文将介绍基于AT89S52单片机的电机控制系统设计,以及如何利用该系统进行电机控制。
AT89S52单片机简介AT89S52是一款由Atmel公司生产的8位单片机。
它基于MCS-51系列体系结构,并且配备了丰富的外设。
这使得它成为设计和开发嵌入式系统的优秀选择之一。
电机控制系统设计概述电机控制系统设计的目标是实现对电机的精确控制。
这需要一个可编程的控制器,如AT89S52单片机,以及一组传感器和执行器。
在本设计中,我们将使用脉冲宽度调制(PWM)技术来控制电机的转速和方向。
系统设计本部分将深入探讨如何设计基于AT89S52单片机的电机控制系统。
硬件设计电机控制系统的硬件设计需要考虑以下几个方面:电机驱动电路电机驱动电路是控制电机转速和方向的关键组成部分。
在本设计中,我们将使用L298N电机驱动模块。
它具有低电压驱动能力,可以提供高电压和高电流,非常适合控制各种电机。
AT89S52单片机连接AT89S52单片机将连接到电机驱动电路。
它将负责生成PWM信号来控制电机的转速和方向。
此外,单片机还将读取传感器数据,并相应地调整电机控制信号。
软件设计电机控制系统的软件设计需要考虑以下几个方面:编写控制程序需要编写控制程序来实现电机控制。
可以使用C语言或汇编语言编写程序,并使用适当的编译器将其编译为可在AT89S52单片机上运行的机器码。
确定PWM参数为了实现对电机的精确控制,需要确定PWM的参数。
这包括占空比、频率等。
可以根据电机的规格和性能需求进行调整。
传感器数据处理在电机控制过程中,传感器将提供有关电机状态的信息。
单片机将读取这些传感器数据,并根据需要调整控制信号。
因此,需要编写适当的代码来处理传感器数据。
系统实现与测试在完成电机控制系统的设计后,需要进行系统实现和测试,以确保其正常工作。
魏璐 基于89C52单片机的步进电机控制器设计
摘要步进电机是将脉冲信号转换为角位移的元件,其调速方式相对于直流电机和三相异步电机来说还比较单一,但相对来说比较容易实现,在不发生丢步严重影响步进电机的因素外,步进电机的转速只取决于脉冲频率、转子齿数和拍数,且不受负载的影响,其角速度与脉冲频率成正比,而且在时间上与脉冲同步,因而在转子齿数和运行拍数一定的情况下,只要控制脉冲频率即可获得所需速度。
本设计基于89C52单片机对步进电机的启动、停止、正转、反转、速度、圈数,六种正常工作方式进行控制,在此基础上添加了温度检测模块,同时本设计还加入了液晶显示电路,用于显示步进电机转动圈数和步进电机所处的工作状态。
关键词:STC89C52单片机脉冲控制步进电机DS18B20AbstractSteper motor which transform pulse current into angular displacement is a original pulse current , its mode of speed control is single but it is easy according to direct current machine and three step guide motor. In condition that it doesn’t happened that lost step and overshoot have serious influence on steper motor ,the pulse rate of step motor is only on basis of pulse frequency, rotor tooth number and number of beats ,it isn’t affe cted by load . its palstance is in proportion to pulse frequency and has the same step with pulse at the time. So on the condition that rotor tooth number run the beat achieve to some numbers, if pulse frequency is controlled, the speed needed would be getted. This design is on account of corotation, start,stop,inversion, accelerate and moderate of steper motor being controlled by 89C52 single chip microcomputer, Add a temperature detection module on the basis of the designing, At the same time, this design also is added to digital display circuit. It can be used to show rotation number of steper motor and operating state of steper motor.Key words: STC89C52 single chip microcomputer chopper control Stepper motor DS18B20目录第1章步进电机的概述 (1)1.1 步进电机原理 (1)1.1.1 反应式步进电机 (1)1.1.2 感应式步进电机 (2)1.1.3 混合式步进电机 (2)1.1.4 步进电机工作方式 (3)1.2 步进电机的工作特点 (4)1.4 步进电机常见的控制方案与驱动技术简介 (4)第2章系统的总体设计方案 (7)第3章步进电机控制器硬件电路设计 (9)3.1 主控电路设计 (9)3.2 按键模块(矩阵键盘) (9)3.3 温度模块 (10)3.3 液晶显示模块 (11)3.4声光报警模块 (12)3.5电机驱动模块 (13)3.6 测速模块 (14)第4章系统软件设计 (15)4.1系统软件设计的总体结构 (15)4.2 主程序流程的设计 (16)4.3 温度监测技术 (16)4.4 按键流程的设计 (16)4.5 光电传感测速 (17)4.6 报警流程的设计 (18)4.7 液晶显示流程设计 (19)第5章总结 (20)5.1 全文总结和心得体会 (20)5.2 系统存在的问题和改进方案 (20)5.3 展望 (21)参考文献 (21)致谢 (22)附录 (23)附录一系统设计电路总图 (23)附录二PCB图 (24)附录二软件程序 (25)第1章步进电机的概述1.1 步进电机原理步进电机是将电脉冲信号转变为角位移或线位移的控制元件。
基于AT89C52单片机的步进电机控制系统研究
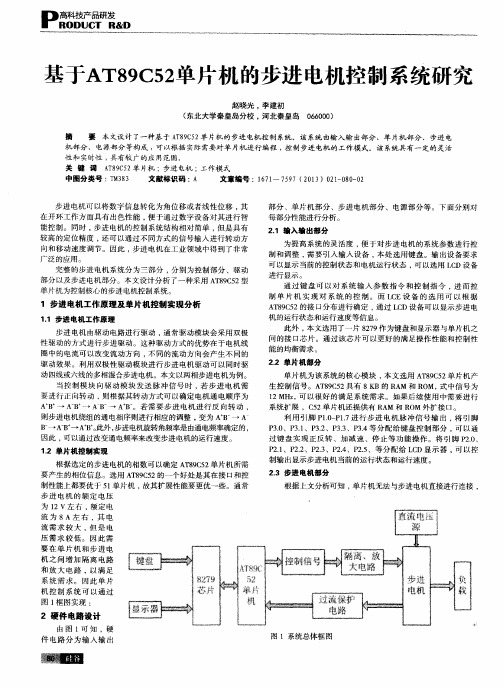
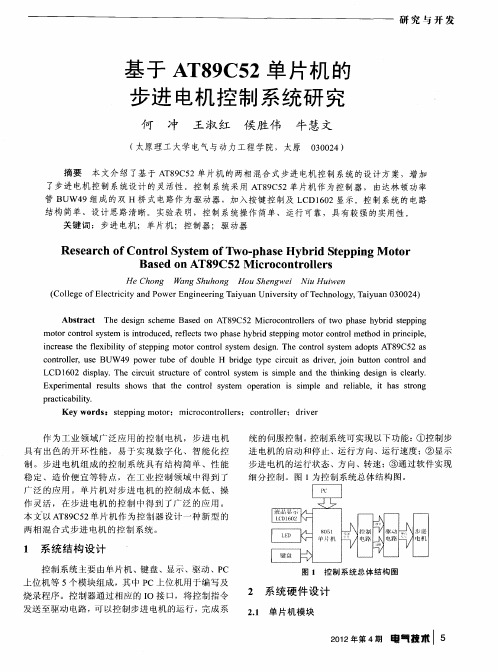
部 分 、单 片 机部 分 、步进 电机 部 分 、 电源部 分 等 。下 面 分 别对 每 部分 性能 进行 分 析 。 2 . 1 输 入输 出部分 为提 高 系统 的灵 活 度 , 便 于对 步 进 电机 的系 统参 数 进 行 控 制 和调 整 , 需 要 引入 输 入设 备 , 本处 选 用 键盘 。输 出设 备 要 求 可 以显示 当前 的控 制状 态 和 电机运 行 状 态 , 可 以选 用 L E D设 备 进 行显 示 。
步 进 电机 可 以将 数 字信 息 转 化为 角 位移 或 者 线性 位 移 , 其 在 开 环 工作 方 面具 有 出色 性 能 , 便 于通 过数 字 设 备对 其 进行 智 能控 制 。 同时 , 步进 电机 的控 制 系统 结 构相 对 简 单 , 但是 具 有 较 高 的定 位 精度 , 还 可 以 通过 不 同方 式 的信 号 输人 进 行 转 动方 向和 移 动速 度 调节 。 因此 , 步进 电机 在 工业 领 域 中得 到 了 非常 广 泛 的应用 。 完整 的 步进 电机 系统 分 为三 部 分 , 分 别 为控 制部 分 、驱动 部分 以及 步 进 电机部 分 。本 文设 计分 析 了一 种采 用 A T 8 9 C 5 2 型 单 片机 为控 制核 心 的步进 电机控 制 系统 。
A T 8 9 C 5 2的接 口分 布进 行 确 定 , 通过 L C D设备 可 以显 示 步进 电 机 的运 行状 态 和运 行速 度等 信息 。 此外 , 本 文 选用 了 一片 8 2 7 9作 为键 盘 和显示 器 与单 片 机之 间 的接 口芯 片 。通过 该 芯 片 可 以更 好 的满 足 操作 性 能 和控 制 性 能 的均衡需 求 。 2 . 2 单 片机 部 分
基于AT89S52步进电机定位控制毕业设计
1系统概述 (1)1.1 步进电机控制概述 (1)1.2原理 (2)1.3步进电机控制系统的原理 (3)1.3.1步进电机驱动系统 (3)1.3.2步进电机方向控制 (3)2系统硬件概述 (5)2.1 AT89S52功能介绍 (5)2.2 L297的工作原理介绍 (6)3步进电机程序设计 (7)1系统概述1.1 步进电机控制概述步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速及停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。
当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度f称为“步距角”),它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的。
同时,也可以通过控制脉冲频率来控制电机转动的速度和加速度。
从而达到调速的目的。
步进电机可以作为一种控制用的特种电机,由于其没有积累误差(精度为100%)的特点,广泛应用于各种开环控制随着IT技术的飞速发展,单片机应用系统几乎覆盖了整个社会。
本文就步进电机定位系统的单片机软件设计进行了介绍,该方法为构建低成本、高效率、便于维护的单片机系统提供了良好的体系框架结构和设计思想。
1.2原理步进电机的工作就是步进转动,齐功用是将脉冲电信号变换成相应的角位移或是直线位移,就是给一个脉冲信号,电动机转动一个角度或是前进一步。
步进电机的角位移量与脉冲数成正比,它的转速频率(f)成正比,在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载的影响,即给电机加一个脉冲信号,电机则转过一个步距脚。
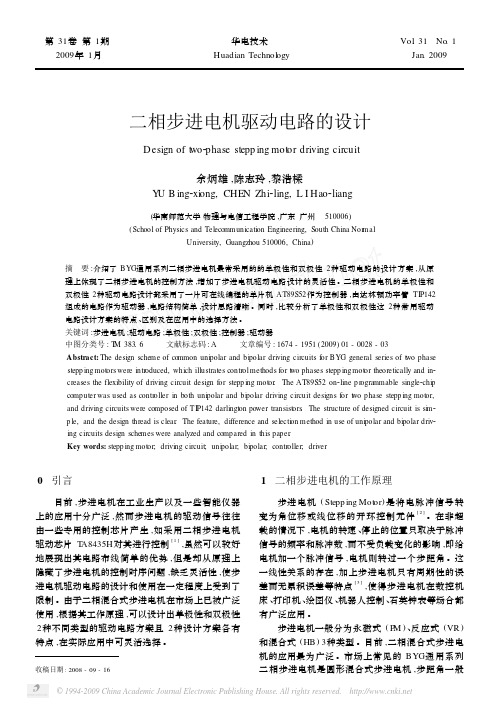
如下图2所示的步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各项绕组按合适的时序通电,就能使步进电机转动。
下图是该四相反应式步进电机工作原理示意图。
图1 步进电机原理图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
基于AT89C52的二相步进电机调速控制系统设计
动电机运转 。 从性能上看 ,实践表明 , 2种驱动电路在相同电
4 结束语
压 VDD的驱动下 ,单极性驱动电路的输出力矩比双
随着对步进电机研究的深入 , (下转第 33页 )
© 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved.
(华南师范大学 物理与电信工程学院 ,广东 广州 510006) ( School of Physics and Telecommunication Engineering, South China Normal
University, Guangzhou 510006, China)
摘 要 :介绍了 BYG通用系列二相步进电机最常采用的的单极性和双极性 2种驱动电路的设计方案 ,从原 理上体现了二相步进电机的控制方法 ,增加了步进电机驱动电路设计的灵活性 。二相步进电机的单极性和 双极性 2种驱动电路设计都采用了一片可在线编程的单片机 AT89S52作为控制器 ,由达林顿功率管 TIP142 组成的电路作为驱动器 ,电路结构简单 ,设计思路清晰 。同时 ,比较分析了单极性和双极性这 2种常用驱动 电路设计方案的特点 、区别及在应用中的选择方法 。 关键词 :步进电机 ;驱动电路 ;单极性 ;双极性 ;控制器 ;驱动器 中图分类号 : TM 383. 6 文献标志码 : A 文章编号 : 1674 - 1951 (2009) 01 - 0028 - 03 Abstract: The design scheme of common unipolar and bipolar driving circuits for BYG general series of two phase stepp ing motors were introduced, which illustrates control methods for two phases stepp ing motor theoretically and in2 creases the flexibility of driving circuit design for stepp ing motor. The AT89S52 on2line p rogrammable single2chip computer was used as controller in both unipolar and bipolar driving circuit designs for two phase stepp ing motor, and driving circuits were composed of TIP142 darlington power transistors. The structure of designed circuit is sim2 p le, and the design thread is clear. The feature, difference and selection method in use of unipolar and bipolar driv2 ing circuits design schemes were analyzed and compared in this paper. Key words: stepp ing motor; driving circuit; unipolar; bipolar; controller; driver
基于STC89c52单片机的步进电机控制系统设计

显示 、 人机互动等 四个 模块 组成 ; 实现 的功能 有 ( 1 ) 键盘 上相应 的 按键可 以控 制步进 电机停 止 、 转动 、 转 速的快 慢 、 正反转 等 ; ( 2 ) 通 过L E D 可 以 显 示 电机 的 工 作 状 态 , 如 转 速 的大小 , 转 动方 向 等 ; ( 3 ) 通 过 人 机 互 动 可 以灵 活 的对 电机 进 行 控 制 , 随 时 可 以 改 变 对 步 进 电机 的操作 ; 3系 统 硬 件 设 计 3 . 1 单 片机 模 块 该设计用 S T C8 9 c 5 2 单 片机 , 单片机 的 P 1 . 0 一P 1 . 3 接 步进 电机 驱 动器 。脉 冲信号 由延 时函数 产生 , 通 过单 片 机 的 P 1 . 0口输 出, 可 以通过 改变延 时 函数 的延时 时间来调 整电机 的转速 , 通过键 盘 的按钮 , 就可 以改变延时 函数 的延时 时间从 而改变 电机 的转 速 , P 0 口接 L E D数码管 , 可 以显示 当前 的电机转速 状态 。单 片机 的 P 3 . 0 P 3 . 4 接按 键电路 。振荡 电路 的晶振频 率为 : 1 1 . 0 5 9 2 MH z 。
基于 S T C 8 9 c 5 2 单 片机 的 步进 电 机 控 制 系统 设 计
邢聪聪 杨 成 邵 帅
( 西北 民族 大学电气工程 学院
【 摘 妻】 本设 计是 基 于 S T C 8 9 c 5 2 单 片机 的 步进 电机控 制 系统 , 步进 电 机 转动是 通 过将 单 片机 产 生 的信 号 脉 冲 转换 成 步进 电机 相 应 的 角位 移, 从 而 实现 工作 的驱 动 ; 该设 计 结构 简单 , 易于操 作 , 精度较高, 成本 较低 , 使 用 灵活等 特 点。 【 关键 词】 s T c 8 9 c 5 2 ; 步进 电机 ; 信 号脉 冲
基于AT89S52单片机的电机控制系统设计

基于AT89S52单片机的电机控制系统设计电机控制在监控器材、医疗器械、电动阀门、电动窗帘、家用电器、旋转灯具等方面有着广泛的应用,因此设计一款可控性好、精度高的电机控制系统是一件十分故意义的事。
本文介绍的基于AT89S52的电机控制系统的软硬件设计,在按键的操作下对时光举行设定,控制电机的转动,对工作状态准时间举行显示。
2 设计计划解释该系统先通过按键对电机的正、反向(即顺时针、逆时针)转动时光分离设置,时光显示在上,格式为时:分:秒(通过转变程序可以挑选不同的格式)。
采纳倒计时方式,正向时光完毕,立即开头反向转动时光计时,反向时光结束,自动复原到初始设定的时光。
时光设定完成后,按下开头键,正向转动时光开头计时,电机工作指示灯闪耀,正向转动指示灯亮,同时电机正向转动;正向时光完毕,反向时光开头计时,正向转动指示灯熄灭,反向转动指示灯亮,同时电机反向转动。
按下停止键,时光停止计时,电机停止工作,工作指示灯熄灭。
系统采纳的电机为60TDY-11可逆永磁电机,其内部采纳两组绕组,用实现定向旋转,通过转变电容和电机输出引线的接法,能够牢靠地实现电机定向旋转并控制旋转方向。
3 硬件设计囫囵系统硬件结构1所示。
3.1 按键输入和控制电路设计按键输入电路采纳6个按键分离衔接到单片机的P2.0~P2.5口,作为控制信号的输入。
按下K0键,系统进入时光设定模式,延续按下K0键可以挑选对不同的时光单位举行设置,通过K1,K2键对时光举行加1或减1。
按下K3键退出时光设定模式,K4,K5键分离为启动和停止键。
电机控制电路的控制芯片采纳ATMEL公司的AT89S52,它有8 KB FLASH,256 B RAM,32位I/O口线,定时器,两个数据指针,三个16位定时器/计数器,一个6向量2级中断结构,全双工串行口,片内晶振准时钟电路。
其内部资源丰盛、性价比高,能够满足设计要求。
PO.O~P0.2作为三个工作指示灯的控制信号输出,需要外接上拉;P1.0~P1.2为液晶的控制信号输出;P3.0~P3.1分离是控制电机正反向转动的控制信号输出。
基于AT89C52单片机的步进电机控制系统研究
H eCh n Wa g S h n o g n hu o g H o uSh n e gwe N i i uH ui n we
( l g f e t ct n o r n ie rn ay a iest f e h o o y T iu n0 0 2 ) Co l eo cr i a dP we gn eigT iu nUnv ri o c n lg , ay a 3 0 4 e El i y E y T
步进 电机 的 5种运 行状 态 以及 运行速 度 。5位 L D E 通 过 7 L 18接 在单 片机 的 P . 4 S3 23 25口上 ,5位 一P . L 分别 用于 表示步 进 电机 的 正转 、反转 、加 速 、减 D 速 、停 止 5种运行 状态 。
23 驱 动 模 块 .
3 V 和 5 电压 分别给 单片机 、 晶振 、L D 和控制 . 5 V E 电路供 电。1MH 2 z的 晶振给 单 片机 提供 时钟信 号 。 单 片机 的串 口用 于和 P 上 位机 的通信 以及烧录 软 C
件程 序 。P 口控 制驱动 电路 开关管 的通断 。P 和 1 0 P 2口控制 L D1 0 C 6 2和 L D 组成 的显示模 块 。 3口 E P 检 测键盘 信号及 外部 中断信 号 。 22 键盘 及显示模 块 . 控制 系统 设置 了 5位 独立 按键组 成的键 盘模块 以及 由 L D10 C 6 2和 5位 L D 组成 的显示模 块 。通 E 过键 盘可 以对 步进 电机进行 正转 、反 转 、加 速 、减 速 、停止 功 能的操 作 。步进 电机 运行 时 的状 态信 息 可 以通 过显 示模块 直观 的显示 出来 。图 2为键 盘及
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2012届毕业生毕业设计说明书题目:基于单片机的步进电机的控制器设计院系名称:信息科学与工程学院专业班级:电子信息科学与技术学生姓名:学号:指导教师:教师职称:2012年月日毕业设计外文摘要Title The design of the control system ofStep—motorAbstractStepper motor control can be achieved in different ways, can be used early analog circuits, digital circuits or a combination of analog and digital circuit means. With the rapid development of science and technology in recent years, the application of SCM is a growing, while traditional control test drive rapid updates. This paper describes a core component of the AT89C52, as the signal generated by logic control and microcontroller technology and assembly language programming designed stepper motor control system, Start and stop of the stepping motor to handle the switch manually by people. In addition, this system also adds a stepper motor forward reverse, acceleration and deceleration, the screen display. Meanwhile, through software simulation in proteus, too can be seen that the approximation of the true effect of the simulation results.Keywords stepper motor microcontroller AT89C52 proteus simulation目次摘要 (2)Abstract (3)1 绪论 (5)1.1 课题研究的目的和意义 (5)1.2 国内外研究现状 (6)1.3 课题研究的主要内容和要求 (3)2 步进电机常见的控制方案论证 (8)2.1 基于电子电路控制 ....................................................... 错误!未定义书签。
2.2 基于PLC控制 ...............................................................错误!未定义书签。
2.3 基于单片机控制 (7)3 系统硬件电路设计.......................................................................... 错误!未定义书签。
3.1 控制电路 ........................................................................错误!未定义书签。
3.2 最小系统 (10)3.3 驱动电路 (11)3.4 显示电路 (13)3.5 总体电路图 (14)4 系统软件设计.................................................................................. 错误!未定义书签。
4.1 软件设计分析 ................................................................错误!未定义书签。
4.2 主程序设计 ....................................................................错误!未定义书签。
5 仿真与调试...................................................................................... 错误!未定义书签。
5.1 仿真调试的操作步骤 ....................................................错误!未定义书签。
5.2 仿真结果 ........................................................................错误!未定义书签。
总结.................................................................................................... 错误!未定义书签。
致谢. (35)参考文献.......................................................................................... 错误!未定义书签。
1 绪论1.1 课题研究的目的和意义步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
正是由于步进电机具有突出的优点,所以成了机电一体化的关键产品之一,广泛应用在各种自动化控制系统中。
随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。
比如在数控系统中就得到广泛的应用。
目前世界各国都在大力发展数控技术,我国的数控系统也取得了很大的发展,我国已经能够自行研制开发适合我国数控机床发展需要的各种档次的数控系统。
虽然与发达国家相比,我们我国的数控技术方面整体发展水平还比较低,但已经在我国占有非常重要的地位,并起了很大的作用。
除了在数控系统中得到广泛的应用,近年来由于微型计算机方面的快速发展,使步进电机的控制发生了革命性变革。
优点明显的步进电机被广泛应用在电子计算机的许多外围设备中,例如打印机,纸带输送机构,卡片阅读机,主动轮驱动机构和存储器存取机构等,步进电机也在军用仪器,通信和雷达设备,摄影系统,光电组合装置,阀门控制,数控机床,电子钟,医疗设备及自动绘图仪,数字控制系统,工具机控制,程序控制系统以及许多航天工业的系统中得到应用。
因而,对于步进电机控制的研究也就显得尤为重要了。
1.2 国内外研究现状步进电机是国外发明的。
中国在文化大革命中已经生产和应用,例如江苏、浙江、北京、南京、四川都生产,而且都在各行业使用,驱动电路所有半导体器件都是完全国产化的,当时是全分立元器件构成的逻辑运算电路,还有电容耦合输入的计数器,触发器,环形分配器。
国外在大功率的工业设备驱动上,目前基本不使用大扭矩步进电动机,因为从驱动电路的成本,效率,噪音,加速度,绝对速度,系统惯量与最大扭矩比来比较,比较不划算,还是用直流电动机,加电动机编码器整体技术和经济指标高。
一些少数高级的应用,就用空心转杯电机,交流电机。
国外在小功率的场合,还使用步进电机,例如一些工业器材,工业生产装备,打印机,复印件,速印机,银行自动柜员机。
国外用许多现代的手段将步进电机排挤出驱动应用,除了前面提到的旋转编码器,打印机还使用光电编码带或感应编码带配合直流电动机,实现闭环直线位移控制。
国内过去是用大力矩步进电动机实现机床数控,有实力的公司现在也采用交流电动机驱动数控机床,在驱动设备的主要差距,是国外对交流电动机的控制理论与工程分析和应用能力强,先进的控制理论作为软件,写在控制器内部。
总的来说,步进电机是一种简易的开环控制,对运用者的要求低,不适合在大功率的场合使用。
在卫星、雷达等应用场合,中国在文化大革命后期,就生产了力矩电机,就生产了环形力矩电机,在高品质的控制场合,有时还不能使用步进电机。
步进电机的细分控制,在改革开放初期,国内就已经基本掌握,这与交流电动机的矢量控制相比,难度要低得多。
1.3 课题主要研究内容和要求本设计所选的步进电机是四相五线步进电机,采用的方法是利用单片机控制步进电机的驱动。
当步进驱动器接收到单片机给它的一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度。
因此可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
本设计采用单片机AT89C52来作为整个步进电机控制系统的运动控制核心部件,采用了电机驱动芯片ULN2003构成了整个系统的驱动部分,再加上作为执行部件的步进电机来构成了一个基本的步进电机控制系统。
系统的具体功能和要求如下:1.单片机最小系统的设计;2.独立按键实现步进电机的启停、加速、减速、正转、反转的控制;3.能实现步进电机的转速调节,最低转速为1min/圈,最高转速为3S/圈;4.步进电机的转速由数码管显示。
2 步进电机常见的控制方案论证2.1、基于电子电路的控制步进电机受电脉冲信号控制,电脉冲信号的产生、分配、放大全靠电子元器件的动作来实现。
由于脉冲控制信号的驱动能力一般都很弱,因此必须有功率放大驱动电路。
步进电机与控制电路、功率放大驱动电路组成一体,构成步进电机驱动系统。
此种控制电路设计简单,功能强大,可实现一般步进电机的细分任务。
这个系统由三部分组成:脉冲信号产生电路、脉冲信号分配电路、功率放大驱动电路。
系统组成如图1.1所示。
图1.1基于电子电路控制系统此种方案即可为开环控制,也可闭环控制。
开环时,其平稳性好,成本低,设计简单,但未能实现高精度细分。
采用闭环控制,即能实现高精度细分,实现无级调速。
闭环控制是不断直接或间接地检测转子的位置和速度,然后通过反馈和适当的处理,自动给出脉冲链,使步进电机每一步响应控制信号的命令,从而只要控制策略正确电机不可能轻易失步[4]。