基于51单片机的步进电机控制-
基于51单片机步进电机的控制及细分驱动电路-简易软件
基于51单片机步进电机的控制及细分驱动电路悬赏分:20|解决时间:2009-6-22 21:11 |提问者:sailorman123我的邮箱sailor3848352@拜求高手指点,希望能附带相应的电路图,和一定的说明。
谢谢给位大虾了!!!最佳答案参考:/chary8088/blog/item/177332ce39cef70a92457ea9.html接触单片机快两年了,不过只是非常业余的兴趣,实践却不多,到现在还算是个初学者吧。
这几天给自己的任务就是搞定步进电机的单片机控制。
以前曾看过有关步进电机原理和控制的资料,毕竟自己没有做过,对其具体原理还不是很清楚。
今天从淘宝网买了一个EPSON的UMX-1型步进电机,此步进电机为双极性四相,接线共有六根,外形如下图所示:拿到步进电机,根据以前看书对四相步进电机的了解,我对它进行了初步的测试,就是将5伏电源的正端接上最边上两根褐色的线,然后用5伏电源的地线分别和另外四根线(红、兰、白、橙)依次接触,发现每接触一下,步进电机便转动一个角度,来回五次,电机刚好转一圈,说明此步进电机的步进角度为360/(4×5)=18度。
地线与四线接触的顺序相反,电机的转向也相反。
如果用单片机来控制此步进电机,则只需分别依次给四线一定时间的脉冲电流,电机便可连续转动起来。
通过改变脉冲电流的时间间隔,就可以实现对转速的控制;通过改变给四线脉冲电流的顺序,则可实现对转向的控制。
所以,设计了如下电路图:C51程序代码为:代码一#include <AT89X51.h>static unsigned int count;static unsigned int endcount;void delay();void main(void){count = 0;P1_0 = 0;P1_1 = 0;P1_2 = 0;P1_3 = 0;EA = 1; //允许CPU中断TMOD = 0x11; //设定时器0和1为16位模式1 ET0 = 1; //定时器0中断允许TH0 = 0xFC;TL0 = 0x18; //设定时每隔1ms中断一次TR0 = 1; //开始计数startrun:P1_3 = 0;P1_0 = 1;delay();P1_0 = 0;P1_1 = 1;delay();P1_1 = 0;P1_2 = 1;delay();P1_2 = 0;P1_3 = 1;delay();goto startrun;}//定时器0中断处理void timeint(void) interrupt 1{TH0=0xFC;TL0=0x18; //设定时每隔1ms中断一次count++;}void delay(){endcount=2;count=0;do{}while(count<endcount);}将上面的程序编译,用ISP下载线下载至单片机运行,步进电机便转动起来了,初步告捷!不过,上面的程序还只是实现了步进电机的初步控制,速度和方向的控制还不够灵活,另外,由于没有利用步进电机内线圈之间的“中间状态”,步进电机的步进角度为18度。
基于51单片机的步进电机正反转可控设计与仿真

2020.19设计研发基于51单片机的步进电机正反转可控设计与仿真李建中(江苏省海门中等专业学校,江苏南通,226100)摘要:步进电机是伺服控制中的关键部件,对步进电机进行精确高效地控制,是实现精密运动、制造等的重要手段。
釆用51单片机作为电机的控制核心-ULN2003A作为电机的驱动芯片,选用额定电压为5V的小型步进电机,设置正转、反转、停止、加速、减速5个按钮,其中正转、反转和停止均有对应的LED指示灯。
通过Keil进行控制程序的编写,在Proteus 中进行仿真电路的连接,结果表明:电路设计正确;步进电机能够根据按钮指令进行运转,达到了设计预期;系统可应用于某些需要高精度控制的场合。
关键词:步进电机;51单片机;ULN2003A;Keil;ProteusDesign and Simulation of Positive and Negative Rotation ofStepping Motor Based on51Single Chip MicrocomputerLi Jianzhong(Jiangsu Province Haimen Secondary Vocational School,Narrtong Jiangsu,226100)Abst r act;St epper motor is the key compone n t in servo cont r ol.It is an import a n t means to realize precise motion and manufacture to control stepping motor accurately and efficiently.51single chip microcomputer is used as the cont r ol core of the mot o r,uln2003a is used as the driving chip of the motor,the small st e pping motor with:r ated volt a ge of5V is selec t ed,and five buttons of forward rotation,reverse rotation,stop,acceleration and deceleration are set,and the corresponding LED indicator lights are used for forward rotation,reverse rotation and stop.The resuIts show that:the circuit design is correct;the stepper motor can operate according to the button command,which meets the design expectation;the system can be applied to some occasions requiring high-precision control.Keywords:stepper motor;51single chip microcomputer;ULN2003A;Keil;Proteus0引言步进电机在工业制造、数控机床、各种伺服系统中均有应用。
毕业设计(论文)-基于AT89C51单片机的步进电机控制系统

内蒙古科技大学本科生毕业设计说明书(毕业论文)题目:基于AT89C51单片机的步进电机控制系统设计学生姓名:学号:专业:自动化班级:自动化06-3班指导教师:基于AT89C51单片机的步进电机控制系统摘要步进电机是数字控制系统中的一种执行元件,它能按照控制脉冲的要求,迅速起动,制动,正反转和调速。
具有步距角精度高,停止时能自锁等特点,因此步进电机在自动控制系统中,特别是在开环的控制系统中得到了日益广泛的应用。
本文以单片机和环形脉冲分配器为核心设计的步进电机控制系统,通过软硬件的设计调试,实现步进电机能根据设定的参数进行自动加减速控制,使控制系统以最短的时间到达控制终点,而又不发生失步的现象;同时它能准确地控制步进电机的正反转,启动和停止。
硬件是以AT89C51单片机为核心的控制电路,主要包括:环形脉冲分配器、键盘显示电路、步进电机的驱动电路等。
软件部分采用C语言编程,主要包括键盘显示程序、步进电机的调速程序、停止判断程序等。
关键词:步进电机控制系统;调速;单片机Based on AT89C51 Single-chip ComputerStepping Motor Control SystemAbstractStepping motor is a kind of digital control system components. It can achieve quick start-up, positive inversion, stopping and speed control, according to the control pulse. It has high precision step angle, and can be self-locking when it keeps still. As these characteristics, stepping motor in automatic control system, especially in the open loop control system has been widely applied.This article mainly focuses on taking Single-chip Computer and cycle pulse distributor as the core, and designing the stepping motor control system. Through the design of the software and hardware debugging, it realizes controlling the step motor’s acceleration and deceleration automatically, according to parameter setting. Making the system arrive the end point with the shortest time, but not occur outing of step. Besides it can accurately achieve start-up, positive inversion and shutdown. Hardware takes AT89C51 as the core of control circuit, mainly including: cycle pulse distributor, keyboard and display circuit, stepping motor driving circuit, etc. Software part adopts the C language programming, mainly including keyboard and display program, stepping motor speed control program, stop judging program, etc.Key words: Stepping motor control system; speed control; Single-chip Computer目录摘要 (I)Abstract (II)第一章引言 (1)1.1 课题提出的背景和研究意义 (1)1.2 课题的主要研究内容 (2)1.3 本章小结 (2)第二章步进电机控制系统设计 (3)2.1 步进电机的原理 (3)2.1.1 三相单三拍通电方式 (3)2.1.2 三相双三拍通电方式 (5)2.1.3 三相六拍通电方式 (6)2.2 环形脉冲分配器 (8)2.3 续流电路 (12)2.3.1 二极管续流 (13)2.3.2 二极管—电阻续流 (14)2.4 步进电机驱动电路 (15)2.5 步进电机的变速控制 (17)2.5.1 变速控制的方法 (19)2.6 步进电机在自动生产线中的应用 (20)2.7 本章小结 (22)第三章控制系统硬件设计 (23)3.1 硬件系统设计原则 (23)3.2 控制系统组成 (23)3.3 主要元件的选择 (24)3.3.1 单片机的选择 (24)3.3.2 EPROM的选择 (25)3.3.3 可逆计数器的选择 (27)3.4 控制系统接口电路的设计 (27)3.4.1 环形脉冲分配器设计 (27)3.4.2 显示电路设计 (29)3.4.3 外部复位电路设计 (30)3.5 控制系统整体电路设计 (31)3.6 本章小结 (31)第四章控制系统软件设计 (32)4.1 软件系统设计原则 (32)4.2 步进电机控制系统功能设计 (32)4.3 主程序设计 (33)4.3.1 主程序工作过程 (33)4.3.2 主程序工作流程图 (34)4.3.3 定时器T0中断程序流程图 (34)4.4 Proteus仿真 (37)4.5 显示程序设计 (39)4.6 键盘程序设计 (39)4.7 调速程序设计 (41)4.7.1 20BY步进电机参数 (41)4.7.2 步进电机转速与频率的关系 (41)4.8 本章小结 (42)第五章结束语 (43)参考文献 (44)附录 (46)附录A 系统程序(C) (46)附录B 20BY步进电机转速与定时器定时常数关系表 (59)附录C 控制系统电路图 (62)致谢 (63)第一章引言1.1 课题提出的背景和研究意义由于步进电机不需要位置传感器或速度传感器就可以实现定位,即使在开环状态下它的控制效果也是令人非常满意的,这有利于装置或设备的小型化和低成本,因此步进电机在计算机外围设备、数控机床和自动化生产线等领域中都得到了广泛的应用。
单片机控制步进电机调速实验
51系列单片机控制步进电机调速实验实验目的及要求:1、熟悉步进电机的工作原理2、熟悉51系列单片机的工作原理及调试方法3、设计基于51系列单片机控制的步进电机调速原理图(要求实现电机的速度反馈测量,测量方式:数字测量)4、实现51系列单片机对步进电机的速度控制(步进电机由实验中心提供,具体型号42BYG )由按钮控制步进电机的启动与停止;实现加速、匀速、和减速控制。
速度设定由键盘设定,步进电机的反馈速度由LED数码管显示。
实验原理:步进电机控制原理一般电动机都是连续旋转,而步进电动却是一步一步转动的,故叫步进电动机。
步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
因此步进电动机是一种把脉冲变为角度位移(或直线位移)的执行元件。
步进电动机的转子为多极分布,定子上嵌有多相星形连接的控制绕组,由专门电源输入电脉冲信号,每输入一个脉冲信号,步进电动机的转子就前进一步。
由于输入的是脉冲信号,输出的角位移是断续的,所以又称为脉冲电动机。
随着数字控制系统的发展,步进电动机的应用将逐渐扩大。
步进电机区别于其他控制电机的最大特点是,它是通过输入脉冲信号来进行控制的,即电机的总转动角度由输入脉冲数决定,而电机的转速由脉冲信号频率决定。
步进电机的驱动电路根据控制信号工作,控制信号可以由单片机产生。
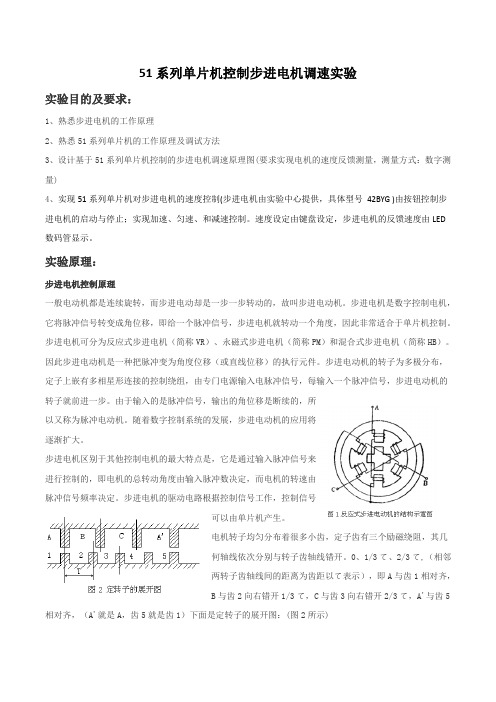
电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。
0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图:(图2所示)图1 是反应式步进电动机结构示意图,它的定子具有均匀分布的六个磁极,磁极上绕有绕组。
基于51单片机的步进电机调速系统(含完整代码)

课程设计报告设计题目:遥控小车——基于51单片机的步进电机调速系统学院:专业:班级:学号:姓名:电子邮件:时间:成绩:指导教师:华南农业大学理学院应用物理系课程设计(报告)任务书学生姓名指导教师职称学生学号专业电子信息科学与技术题目基于51单片机的步进电机调速系统(遥控小车)任务与要求1. 设计并制作电路,利用单片计控制步进电机运转。
2. 通过键盘可以不间断地设定改变电机的转速、转向。
3. 利用显示器实时显示转速等参数。
4. 扩展功能:可设定转动步数。
开始日期2014 年3 月完成日期2014 年3 月1引言步进电机是一种将电脉冲转化为角位移的执行机构。
目前,步进机已经广泛应用于领域,例如工业生产中的机械臂的控制,照明装置和监控摄像机转动等。
步进机在装置转动、精确位移方面有很重大的作用。
本系统是基于STC89C51 单片机的遥控小车。
采用STC89C51单片机作为控制核心,通过ULN2003A驱动步进机(28BYJ-48)转动,由按键和显示屏1602组成人机交互模块,同时通过315M无线发射和接收模块向单片机输入控制信号,将整个系统固定于简易小车上,最终实现小车测试和远程遥控功能。
基本达到预定的设计要求以及功能的扩展。
2系统的设计与理论分析2.1系统总体设计2.2理论分析本设计分为两种工作模式:测试模式、遥控模式。
在电路板上有一个带锁的开关进行设置。
测试模式工作时,通过控制小车上的按键进行加速、减速、反转、设置、步数增、步数减等按键,单片机扫描按键,通过软件控制液晶模块显示对应的转速、设置的速度和步数,同时控制步进机模块进行相应的转动。
步进机的是由ULN2003A达林顿管驱动,由单片机控制输入脉冲的频率来控制步进机的转速,单片机是通过程序查表对4个I/O口输出脉冲,本次设计采用的是两相四线减速步进机,步进角为5.625°,减速比为64:1,程序采用的是8拍查表,具有较好的扭矩。
遥控模式工作时,遥控部分五个按键分别输入前、后、左、右、暂停,单片机扫描按键,通过无线发射模块发射串行编码,小车的无线接收模块接收对应的编码,送至单片机进行解码,从而控制液晶模块的显示和步进机模块的工作,进而完成功能。
基于51单片机的步进电机控制系统设计

基于51单片机的步进电机控制系统设计步进电机是一种特殊的直流电动机,具有定角度、定位置、高精度等特点,在许多领域得到广泛应用,如机械装置、仪器设备、医疗设备等。
本文将基于51单片机设计一个步进电机控制系统,主要包括硬件设计和软件设计两部分。
一、硬件设计步进电机控制系统的硬件设计主要包括51单片机、外部电源、步进电机驱动模块、以及其他辅助电路。
1.51单片机选择由于步进电机控制需要执行复杂的算法和时序控制,所以需要一个性能较高的单片机。
本设计选择51单片机作为主控芯片,因为51单片机具有丰富的外设接口、强大的计算能力和丰富的资源。
2.外部电源步进电机需要较高的电流供给,因此外部电源选择稳定的直流电源,能够提供足够的电流供电。
电源电压和电流的大小需要根据具体的步进电机来确定。
3.步进电机驱动模块步进电机驱动模块是连接步进电机和51单片机的关键部分,它负责将51单片机输出的脉冲信号转化为对步进电机的驱动信号,控制步进电机准确转动。
常用的步进电机驱动芯片有L297、ULN2003等。
4.其他辅助电路为了保证步进电机控制系统的稳定运行,还需要一些辅助电路,如限流电路、电源滤波电路、保护电路等。
这些电路的设计需要根据具体的应用来确定。
二、软件设计1.系统初始化系统初始化主要包括对51单片机进行外部中断、定时器、串口和IO 口等初始化设置。
根据实际需求还可以进行其他模块的初始化设置。
2.步进电机驱动程序步进电机的驱动程序主要通过脉冲信号来控制电机的转动。
脉冲信号的频率和脉冲宽度决定了电机的转速和运行方向。
脉冲信号可以通过定时器产生,也可以通过外部中断产生。
3.运动控制算法步进电机的运动控制可以采用开环控制或闭环控制。
开环控制简单,但无法保证运动的准确性和稳定性;闭环控制通过对电机转动的反馈信号进行处理来调整脉冲信号的生成,从而实现精确的运动控制。
4.其他功能设计根据具体的应用需求,可以加入其他功能设计,如速度控制、位置控制、加速度控制等。
基于51单片机的步进电机控制系统设计与实现

步进电机工作原理
步进电机是一种基于磁场的控制系统,工作原理是当电流通过定子绕组时,会 产生一个磁场,该磁场会吸引转子铁芯到相应的位置,从而产生一定的角位移。 步进电机的角位移量与输入的脉冲数量成正比,因此,通过控制输入的脉冲数 量和频率,可以实现精确的角位移和速度控制。同时,步进电机具有较高的分 辨率和灵敏度,可以满足各种高精度应用场景的需求。
二、系统设计
1、硬件设计
本系统主要包括51单片机、步进电机、驱动器、按键和LED显示等部分。其中, 51单片机负责接收按键输入并控制步进电机的运动;步进电机用于驱动负载运 动;驱动器负责将51单片机的输出信号放大,以驱动步进电机。LED显示用于 显示当前步进电机的状态。
2、软件设计
软件部分主要包括按键处理、步进电机控制和LED显示等模块。按键处理模块 负责接收用户输入,并根据输入控制步进电机的运动;步进电机控制模块根据 按键输入和当前步进电机的状态,计算出步进电机下一步的运动状态;LED显 示模块则负责实时更新LED显示。
三、系统实现
1、按键输入的实现
为了实现按键输入,我们需要在主程序中定义按键处理函数。当按键被按下时, 函数将读取按键的值,并将其存储在全局变量中。这样,主程序可以根据按键 的值来控制步进电机的转动。
2、显示输出的实现
为了实现显示输出,我们需要使用单片机的输出口来控制显示模块的输入。在 中断服务程序中,我们根据设定的值来更新显示模块的输出,以反映步进电机 的实时转动状态。
基于单片机的步进电机控制系统需要硬件部分主要包括单片机、步进电机、驱 动器、按键和显示模块等。其中,单片机作为系统的核心,负责处理按键输入、 控制步进电机转动以及显示输出等功能。步进电机选用四相八拍步进电机,驱 动器选择适合该电机的驱动器,按键用于输入设定值,显示模块用于显示当前 步进电机的转动状态。
步进电机控制程序(c语言51单片机)
// pri_dj = Pme );
if( i == set_pwm_width ) { P1 = 0xff; i = 0; one _round_flg = 0; while ( !one_round_flg & key_puse );}
if(!key_puse) { delay(4ms); if(!key_puse) break; }
while ( key_puse & key_clear ); delay ( 8ms );
if ( !key_clear ) { round_num = 0; display(); }
if ( !key_puse ) break; }
while( !key_puse ); delay(8ms);
while( !key_puse ); }
set_display_num(); for(i = 0; i < LEDLen ; i ++){
P0 = 0xf0; P0 = P0 | LEDBuf[i] ; if(i==0) led_1000 = 0; //P0^4 if(i==1) led_100 = 0; //P0^5 if(i==2) led_10 = 0; //P0^6 if(i==3) led_1 = 0; //P0^7
delay ( 1ms ); tmp = (~(P2 | 0xF0)); P2 = 0x7F; // 0111 1111
delay ( 1ms ); tmp = (~(P2 | 0xF0)) * 10 + tmp; set_round_num = set_round_num + tmp * 100; set_round_num = set_round_num * Chilun_Num;
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
如图2.31,采用LED数码管动态显示数据与个项参数,方法简单,容易控制,成本低。
设计如下图
图2.31
2.4驱动电路设计
驱动电路可分为:三极管直接驱动(图3),采用斩波恒流驱动方式(图2.41)和芯片驱动电路等。驱动电路的性能直接关系到步进电机走步的准确与稳定。本电路采用驱动芯片ULN2803。ULN2803是一种大电流高电压型器件,外电路简单(图2.42)。
1.3 步进电机的特点
1.精度高 一般的步进电机的精度为步进角的3-5%,且不累积。可在宽广的频率范围内通过改变脉冲频率来实现调速,快速起停、正反 转控制及制动等,这是步进电动机最突出的优点
2.过载性好其转速不受负载大小的影响,不像普通电机,当负载加大时就会出现速度下降的情况,所以步进电机使用在对速度和位置都有严格要求的场合;
图2.41
图2.42
三 电路设计
3.1
1、步进电机的设计要点和软硬件环境
步进电机和普通电动机不同之处是步进电机接受脉冲信号的控制。即步进电机是将电脉冲信号转换为机械角位移的执行元件。步进电机的控制可以用硬件,也可以用软件通过单片机实现。硬件方法是采用脉冲分配器芯片进行通用换相控制;而软件方法是用单片机产生控制脉冲来控制步进电机的运行状态,这种方法可简化电路,降低成本。
1.2
步进电机分永磁式(PM)、反应式(VR)、和混合式(HB)三种。永磁式步进一般为两相,转矩和体积较小,步进角一般为7.5度或15度;反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。在欧美等发达国家80年代已被淘汰;混合式步进是指混合了永磁式和反应式的优点。它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为0.72度。这种步进电机的应用最为广泛。
关键字:步进电机、数码管、51单片机、ULN2803
一 步进电机与驱动电路
1.1
步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时也可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
Lθ=360 P×N
式中:Lθ为步长;P为相数;N为转子齿数。在图1中,步长为15°,表示电机转一圈需要24步。
1.5 步进电机的驱动
混和步进电机的工作原理
在实际应用中,最流行的还是混和型的步进电机。但工作原理与图1所示的可变磁阻型同步电机相同。但结构上稍有不同。例如它的转子嵌有永磁铁。激励磁通平行于X轴。一般来说,这类电机具有四相绕组,有八个独立的引线终端,如图2a所示。或者接成两个三端形式,如图2b所示。每相用双极性晶体管驱动,并且连接的极性要正确。
在用软件控制时,主要设计要点如下:
判断旋转方向;
按相序确定控制字;
按顺序输入控制字;
确定控制步数和每一步的延时时间。
由于单片机的驱动电流一般都比较小,不能直接驱动电机工作,所以单片机的I/O口输出必须接驱动电路,即功率驱动,才得以控制电机正常工作。控制框图如下图所示:
(2)、相关参数设定:
这里采用四相六线步进电机,这款步进电机的驱动电压12V,步进角为 7.5度 . 一圈 360 度 , 需要 48 个脉冲完成。其相序A-AB-B-BC-C-CD-D-DA。所以其正转控制脉冲为:01h,09h,08h,0ch,04h,06h,02h,03h,00h;反转控制脉冲为:01h,03h,02h,06h,04h,0ch,08h,09h,00h。
图3所示的电路为四相混和型步进电机晶体管驱动电路的基本方式。它的驱动电压是固定的。表1列出了全部步进开关的逻辑时序。
步数
Q1
Q2
Q3
Q4
1
1
0
1
0
2
1
0
0
1
3
0
1
0
1
4
0
1
0
表1
二
2.
该系统中只运用到三个控制按钮,即 “正反”,“换挡”,“启停”,由于按钮较少,所以采用独立键电路,这种按键电路的按键结构相对行列式按键电路更简单,更使人易懂。
基于51单片机的步进电机控制
[摘要]本课程设计的内容是利用51单片机,达到控制步进电机的启动、停止、正转、反转、两档速度和状态显示的目的,使步进电机控制更加灵活。步进电机驱动芯片采用ULN2803,ULN2803具有大电流、高电压,外电路简单等优点。利用四位数码管增设电机状态显示功能,各项数据更直观。实测结果表明,该控制系统达到了设计的要求。
单片机的晶振为12MHZ;
(3)、系统电路图:
一、单片机最小系统的硬件原理接线图:
1、 接电源:VCC(PIN40)、GND(PIN20)。加接退耦电容0.1uF
3.控制方便步进电机是以“步”为单位旋转的,数字特征比较明显,这样就给计算机控制带来了很大的方便,反过来,计算机的出现也为步进电机开辟了更为广阔的使用市场;
4.整机结构简单传统的机械速度和位置控制结构比较复杂,调整困难,使用步进电机后,使得整机的结构变得简单和紧凑。
1.4 步进电机的原理
图1是一种四相可变磁阻型的步进电机结构示意图。这种电机定子上有八个凸齿,每一个齿上有一个线圈。线圈绕组的连接方式,是对称齿上的两个线圈进行反相连接,如图中所示。八个齿构成四对,所以称为四相步进电机。
图1
它的工作过程是这样的:当有一相绕组被激励时,磁通从正相齿,经过软铁芯的转子,并以最短的路径流向负相齿,而其他六个凸齿并无磁通。为使磁通路径最短,在磁场力的作用下,转子被强迫移动,使最近的一对齿与被激励的一相对准。在图1(a)中A相是被激励,转子上大箭头所指向的那个齿,与正向的A齿对准。从这个位置再对B相进行激励,如图1中的(b),转子向反时针转过15°。若是D相被激励,如图1中的(c),则转子为顺时针转过15°。下一步是C相被激励。因为C相有两种可能性:A—B—C—D或A—D—C—B。一种为反时针转动;另一种为顺时针转动。但每步都使转子转动15°。电机步长(步距角)是步进电机的主要性能指标之一,不同的应用场合,对步长大小的要求不同。改变控制绕组数(相数)或极数(转子齿数),可以改变步长的大小。它们之间的相互关系,可由下式计算: