车载式高空作业平台的结构设计论文
车辆工程毕业设计53汽车改装式升降台设计adams%CATIA%ansys正文

第1章绪论1.1选择的背景、研究目的及意义升降台是一种多功能起重装卸机械设备、是一种将人或者货物升降到某一高度的升降设备。
升降平台可分为:固定式、移动式、导轨式和曲臂式。
固定式有:剪叉式升降货梯、链条式升降机、装卸平台等。
移动式分为:四轮移动式升降平台、二轮牵引式升降平台、手推式升降平台、手摇式升降平台、交直流两用升降平台、电瓶车载式升降平台、自行式升降平台、柴油机曲臂自行式升降平台、折臂式升降平台、套缸式升降平台、铝合金升降平台和汽车改装式升降平台,起升高度从1米至20米不等。
铝合金升降平台可分为单柱铝合金,双柱铝合金,三柱和四柱铝合金。
汽车改装式升降台可用于工厂、自动仓库、停车场、市政、码头、建筑、装修、物流、电力、交通,石油、化工、酒店、体育馆、工矿、企业等的高空作业及维修。
升降平台升降系统,是靠液压驱动,也被称作液压升降平台。
在工厂、自动仓库等物流系统中进行垂直输送时,升降平台上往往还装有各种平面输送设备,作为不同高度输送线的连接装置。
一般采用液压驱动,故称液压升降台。
除作为不同高度的以下步骤中我们驱动将液货物输送外,广泛应用于高空的安装、维修等作业。
是一种将人或者货物升降到某一高度的升降设备。
在工厂、自动仓库等物流系统中进行垂直输送时,升降平台上往往还装有各种平面输送设备,作为不同高度输送线的连接装置。
一般采用液压驱动,故称液压升降台。
除作为不同高度的货物输送外,广泛应用于高空的安装、维修等作业。
目前,发达国家生产的汽车改装式升降台质量较好、性能较稳定、设备操作简单,在经销商中口碑良好。
我国的汽车改装式升降台是20世纪90年代依据国外的产品技术生产的,到现在举升机市场已经拥有近百个中外品牌,产品系列成百上千。
然而汽车改装式升降台虽然也相对定型,但很多产品性能还不够稳定,故障多,可靠性差,外观不够美观,在产品设计、技术开发等方面都还有很多地方有待改进。
因此,进一步提高产品性能与可靠性,是国内汽车改装式升降台任重道远且亟需改进的地方。
高空作业车上车工作装置设计论文

武汉科技大学毕业设计高空作业车上车工作装置设计The design of ariel work platform upside mechanism学生姓名孙钊学院名称机电自动化学院专业名称机电一体化指导教师陈新元2014年5月26日摘要高空作业车主要应用于路灯、电力、交通、高速公路、造船修船、通信、建筑、园林、广告、机场、港口、有线电视等行业,使用面广、作业效率高、安全方便,拥有巨大的市场潜力。
本课题主要是对其上车部分进行理论分析、计算并进行结构设计。
高空作业车是由两个机械臂组成,合理确定其一些基本尺寸,运用理论力学知识对其受力分析,用材料力学知识进行强度校核,确定其他尺寸。
根据负载条件,选择液压元件,设计液压系统。
运用绘图软件Pro-e , CAD,画出零件图和装配图。
可靠性设计可以保证高空作业车有足够的强度,有利于保证生产的安全。
关键词受力分析;强度校核;液压系统;零件图和装配图目 录摘要 (I)1 绪论 (1)1.1高空作业车的作用和意义 (1)1.1.1高空作业车简介 (1)1.1.2高空作业车用途 (1)1.1.3高空作业车的技术特点 (1)1.1.4选题意义 (3)1.1.5外国高空作业车的发展概况 (3)1.1.6国内高空作业车发展状况 (3)2上车机构的机械原理设计和分析 (6)2.1上车机构的组成部分 (6)2.2上车结构图 (7)2.3机械设计分析 (8)3 上车机构传动结构设计 (8)3.1上车机构的受力分析 (8)3.2参数确定 (10)3.2.1杆长确定 (10)3.2.2确定参数4321,,,θθθθ的范围 (10)3.2.3初定断面尺寸 (12)3.3可靠性设计 (14)3.3.1臂L 1强度校核 (15)3.3.2臂L 2强度校核 (17)3.3.3铰接旋转轴的强度校核 (20)4.2液压系统设计概述 ............................................................................. 错误!未定义书签。
车载式高空作业平台的结构设计

3)每次建立模型时只考虑单方面受力作用结果,不用共同考虑;
如图2.7所示,建立 空间直角坐标系,其中 轴沿工作臂铰接轴轴线向外,设工作斗载荷为 ,考虑存在偏载, 为空间载荷,为了便于计算,图2.7中先将 在 平面进行分解,分解成沿Z轴的 和平行于 平面的 ,在后面的计算中再将 分解为沿X轴 和Y轴的 。
车载式高空作业平台的结构设计
1.2高空作业机械的国内外发展概况
1.2.1
高空作业车发展起步较早的欧美等发达国家和地区,从20世纪20年代就开始研制,发展历史久远,生产技术也很成熟,具有生产技术水平高、作业车的作业高度大、规格齐全、结构型式丰富、功能多样等优点。总体来看,技术和市场均已很成熟,产品能够进行高空作业、抢险、救援、消防等复杂工作,作业平台的最大载荷可达500kg,最大作业高度已经超过100m,这是我国目前无法设计达到的高度,同时具有各种安全保护措施,很好的保障了工人的安全。大型产品特点是科技含量高、研制与生产周期较长、投资大、市场容量有限,但市场竞争相对较少,产品的利润相对较高。如美国Genie公司、JLG公司和法国HAULOTTE公司在高空作业平台产品都形成了系列化,与此同时,产品更新换代的周期明显缩短。这大大提高了企业在国际市场中的竞争能力和企业的抗风险能力。
我们应提高工程设计效率和品质,节约设计成本,缩短设计周期[4-5]。而传统设计在设计一个工程结构的时候,首先要采用类比方法确定设计方案的初稿,然后对其结构进行分析,画出图纸,然后对重要部件进行强度的校核,并根据校核的结果重新修改设计方案,一般往往要进行多次分析校核和调整才能得到优秀的设计方案。这种设计方法的设计周期长、代价高、效率低,且所得到的方案多数不是最优方案[6-7]。只有加大行业技术创新力度,开发先进的高空作业机械,满足用户的差别化和个性化需求,为用户精细化服务,才能提高中国产品的市场竞争能力。
高空作业车载人作业平台臂架系统优化设计研究
高空作业车载人作业平台臂架系统优化设计研究摘要:当前,高空作业广泛执行,此种作业模式主要是利用高空作业车支撑高空维修等工作平稳运行,其中臂架需要在几十米高空运送物品,保证高空作业稳定安全开展非常重要。
本文主要围绕着臂架系统来展开,基于高空作业模式,对车臂架变幅下降阶段的稳定性展开深入研究,保证高空作业更加安全,为工作人员提供一个可靠的操作环境。
关键词:仿真模型;臂架参数;本体性能引言:臂架的整体性能至关重要,将会影响到高空作业的效率,在作业车中,伸缩臂的质量占据着较大的比例,如果吊臂的重量太大,则会极大地制约工作进度,因此,确保工作强度、刚度趋于合理化设计水平,应加强对臂架系统的改进,提升臂架系统的整体性能,保证高空任务可以顺利完成,优化底盘设施,促进整体设备重心得到稳定效果。
1.分析当前高空作业车臂架变幅体系状态应用变幅机构,可以实现对臂架的上升、下降有效处理,带动臂架整体工作幅度趋于合理化。
变幅机构得到广泛应用,其中在高空作业车方面起到了至关重要的作用,还可以用于混凝土的输送泵车中,它是主要的工作机构,此机构有助于提升整体设备的稳定性。
当前应用比较高频的变幅机构中,其中一种为臂架形式,主要依据变幅性选择对应的变幅方式,从而最大化的发挥机构的性能[1]。
2.基于臂架变幅机构分析其仿真模型2.1有关于臂架结构的概述在臂架体系中,其伸缩机构涉及到诸多方面,不仅包含着基本臂,还包括二节、三节臂形式等。
当油进入到伸缩缸中,就会带动二节臂呈现伸出状态,导致基本臂与钢丝绳的距离越来越远,而对于三节臂与钢丝绳来讲,二者的距离变短了。
与臂架密切相关的变幅机构,其结构组成复杂,具备连杆、转台等部分,同时还拥有三脚架、臂架等部分。
变幅机构的使用,不仅可以促进作业车得到目标高度值,还有助于维护油缸,减少其承受的压力。
针对于臂架有关的变幅机构,在现实作业期间,可以将较大范围的应用材料等输送到目的地。
另外,作业车投入使用时,可以利用变幅机构的铰接,在高空位置实现360度的旋转功能。
车载平台调平机构支腿设计毕业论文

一选题背景1.课题的来源、目的及意义:很多国防及工程机械,如导弹发射车、各种机动雷达天线座车、重型起重机、打桩机等,到达预定位置后, 为了增加其作业稳定性要求快速架设精确的水平基准使车身在工作过程中保持水平状态。
这些车载平台一般都设有液压支腿,支腿的形式和液压系统的组成多种多样,以往采用手动调整螺杆或液压千斤顶,通过观察水泡,由多人反复操作调节各螺杆支腿达到水平,这种方法调整时间长、精度低,操作难度大,且需要多人配合操作。
近年来,自动调平方法发展得很快,包括液压调平和机电调平系统,大大缩短了调平的时间,提高了调平的精度,只需要启动电源即可完成全部架设与调平。
常见的调平机构有螺旋支腿和液压支腿两种形式, 将多个支腿对称布置在发射系统两侧, 通过支腿的上下伸缩, 实现发射系统的调平。
而常用的支臂形式一般有折叠式支臂、收缩式支臂和仿生式支臂。
需要选择一种合适的调平方法,合适的支腿形式以及其布置结构达到高精度高可靠地调平,稳定地受力和支腿能轻松展开收拢的目的。
如今车载平台的调平应用得非常广泛,在军事上应用于雷达野战车,导弹发射车及火炮等高科技武器装备,在工业上应用于起重机,高空作业机,打桩机,挖掘机,摊铺机等多种工程机械。
如果能设计出一种更快速,更稳定,更高精度的调平机构将会大大增加这些武器快速投入战斗的能力和工程上的效率,可使我国的国防力量在这个方面得到很大的提高,工业经济方面也会得到很高的收益。
2.应解决的主要问题及技术指标:主要问题:(1)双轴水平传感器实现四点追逐式调平:在该方式下需要考虑控制系统与执行系统的精度问题(2)支腿的展开及布置形式:要易于操作,保证整车的通过性(3)支腿的受力分析:由于负载较大要考虑结构的刚性问题,影响调平精度,还要使四个支撑点的受力均匀避免其中有一腿不受力或悬空(4)液压缸的锁紧:由于液压缸的内泄漏不可避免,为保证长时间工作不出现软腿现象要在液压缸停止工作时将其锁紧。
车载复合式高精度升降平台设计研究 陈计军
车载复合式高精度升降平台设计研究陈计军发表时间:2019-06-05T17:06:42.730Z 来源:《电力设备》2019年第2期作者:陈计军[导读] 摘要:为了举升车载侦察设备,需要设计一套车载升降平台。
(桂林长海发展有限责任公司技术中心广西桂林 541001)摘要:为了举升车载侦察设备,需要设计一套车载升降平台。
本文是采用液压马达与丝杆组合复合式升降平台的设计研究,它是一种升降可靠,同步一致性好的举升设备。
此平台的设计思路是采用四根丝杆进行升降平台举升/下降操作;采用液压马达同时驱动四根丝杆转动从而实现平台运动;关键词:液压马达;丝杆;升降平台;离合器;1概述目前国内外采用的升降平台大多数为液压缸升降平台,纯电动丝杆升降平台,剪叉式升降平台等。
在升降平台的使用上存在控制精度不高、升降同步一致性差等缺点。
针对目前这些升降平台的不足,开发了一种液压马达与丝杆组合的复合式升降平台。
此平台采用四根丝杆进行升降平台举升/下降操作;采用液压马达同时驱动四根丝杆转动从而实现平台运动。
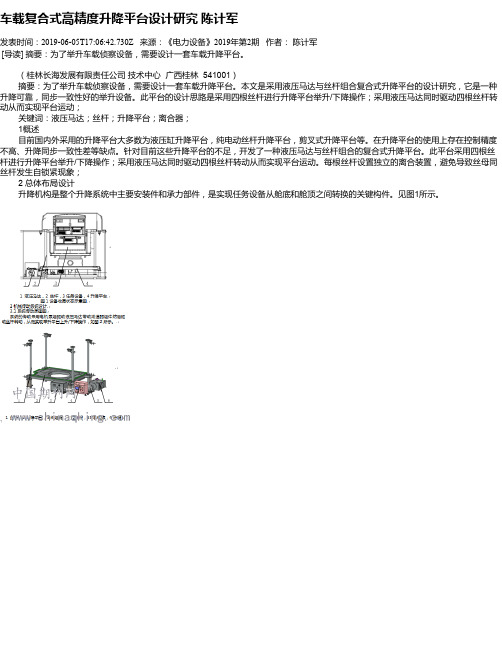
每根丝杆设置独立的离合装置,避免导致丝母同丝杆发生自锁紧现象;2 总体布局设计升降机构是整个升降系统中主要安装件和承力部件,是实现任务设备从舱底和舱顶之间转换的关键构件。
见图1所示。
5结论本文通过对目前车载侦察系统升降平台几种常用升降方式的分析,针对车载侦察系统出现的问题,在增加升降平台单元升降高度方面做了一些尝试,论述了设计思路与实现方案。
采用液压马达与丝杆组合的复合式升降平台,它是一种升降可靠,同步一致性高,精度高的举升平台。
这种升降平台适合在包括低温的各种环境下使用,将逐步在车载化技术中得到应用并发挥重要的作用,使车载侦查系统能够升得更高,“看”得更远。
参考文献:[1] 张利平.液压传动系统设计与使用[M].北京:化学工业出版社,2010.[2] 成大先.机械设计手册:液压传动[M].北京:化学工业出版社,2004.[3] 刘大为,谢方平,卢颂等.小型果园升降作业平台液压系统的设计[J].时代农机,2015(10).[4] 史永革.液压升降台下降同步问题的研究[J].液压与气动,2009,(4):3-4. 作者简介:陈计军(1983-)男,硕士研究生,主要研究方向:机械传动。
车载式高空作业平台的结构设计
1.2高空作业机械的国内外发展概况
1.2.1
高空作业车发展起步较早的欧美等发达国家和地区,从20世纪20年代就开始研制,发展历史久远,生产技术也很成熟,具有生产技术水平高、作业车的作业高度大、规格齐全、结构型式丰富、功能多样等优点。总体来看,技术和市场均已很成熟,产品能够进行高空作业、抢险、救援、消防等复杂工作,作业平台的最大载荷可达500kg,最大作业高度已经超过100m,这是我国目前无法设计达到的高度,同时具有各种安全保护措施,很好的保障了工人的安全。大型产品特点是科技含量高、研制与生产周期较长、投资大、市场容量有限,但市场竞争相对较少,产品的利润相对较高。如美国Genie公司、JLG公司和法国HAULOTTE公司在高空作业平台产品都形成了系列化,与此同时,产品更新换代的周期明显缩短。这大大提高了企业在国际市场中的竞争能力和企业的抗风险能力。
在我国实际工作过程中,人们对于安全性和劳动条件提出了更高的要求,尤其是在高空作业中,原始的脚手架、吊篮等安全系数较低的工作方式将会越来越少,而对于高空作业机械的需求必将越来越多[8]。另一方面,中国造船业逐渐成为世界第一,对于大型车载式高空作业平台的需求急剧增加。据不完全统计,仅中国造船行业在2009年约需六七百台
1.3.2
工作装置由回转台、工作臂架、伸缩软链等组成。回转台通过回转支承安装在车架上,由回转机构驱动,可实现360°全回转。回转机构包括行星减速机、常闭式制动器、液压马达等构成,与回转支承采用外啮合传动方式。
1.3.3
三维全旋机构设备或系统的安装位置一般由标高和方向2个参数确定。由于要求被举升物体在空间相互垂直的3个方向可以进行独立旋转,使物体可以获得任意安装角度,因此设计了三维全旋机构,即在水平和竖直方向设置±90°。旋转机构俯仰方向转角可以通过臂架变幅进行,微调由调平油缸实现,不再设单独机构,从而减少机构设置。
一种车载式高空作业平台[实用新型专利]
![一种车载式高空作业平台[实用新型专利]](https://img.taocdn.com/s3/m/94fb6a6cec3a87c24128c4da.png)
专利名称:一种车载式高空作业平台专利类型:实用新型专利
发明人:李宪民,田旺,潘峰,陆金晶申请号:CN201520479577.5
申请日:20150707
公开号:CN204802951U
公开日:
20151125
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种车载式高空作业平台,包括驾驶室、车体、基座、伸缩臂、平台总成,所述车体上设有基座,所述基座左右两侧分别连接伸缩臂,所述伸缩臂终端与平台总成连接,所述驾驶室内设有液晶显示装置,所述平台总成包括重力传感器、红外传感器、控制台、护栏、平台主体,所述平台主体上四周设有护栏,所述护栏上设有控制台,所述控制台上设有显示灯和监控装置,所述平台主体下端四角设有重力传感器,所述重力传感器与控制台连接,所述护栏上端四周设有红外传感器,所述红外传感器与控制台连接,所述控制台与液晶显示装置连接。
本实用新型采用车载式,移动性能好,操作方便,美观大方,可避免超载和与障碍物擦碰等危险,提高安全性能。
申请人:上海绿地建设(集团)有限公司
地址:200081 上海市西江湾路500号
国籍:CN
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本课题首先对国内外高空作业车的发展进行了概括,提出了发展中的不足,简要介绍了高空作业车的组成,然后对目前国内生产技术不完善的混合臂和伸缩臂式高空作业车的关键结构进行了设计,同时对工作斗调平技术和液压系统等关键技术进行了研究分析。
重点研究了伸缩臂的结构、运动特点,并对其进行了强度校核。
根据高空作业车安全性要求高,工作幅度大,结构复杂等特点,提出了工作臂、副车架以及工作斗调平机构的研究设计方法。
该课题以混合臂式高空作业车为研究对象,详细阐述了伸缩臂的结构设计、变形研究;副车架结构设计、工作稳定性分析;高空作业车的工作斗调平系统的研究分析;液压系统的设计计算。
课题采用积分法对伸缩臂结构进行应力分析、变形分析。
最后,对研究分析结果进行了试验和验证,将试验结果和理论分析结果进行了对比,通过对比分析进一步验证了本文提出的设计方法,对于同类型高空作业车研究计算,具有一定的参考价值。
关键词:高空作业车;结构设计;调平系统研究;液压缸This paper arranged as follows. The first part is the summary of the development of aerial working platform at home and abroad, and put forward some shortages during the development. There is a brief introduction of the component parts of the aerial working platform. This paper introduces a new design proposal of the domestic production technology of mixing arm and telescopic arm aerial working platform. Meanwhile, the analysis can also be seen in the working bucket leveling, hydraulic systems and other key technology. This paper mainly focuses on the telescopic structure, movement characteristics, and its strength check. According to the special requirements of aerial vehicles because of the high security, large in range and the complicated structure, the special design was used in the working arm, subframe and bucket leveling institutions. The subject is based on the study of mixing arm of aerial working platform. The subject describes the structural design of the telescopic boom in detail, and analysis the design of subframe structure design and the job stability. The aerial working platform bucket leveling system analysis and hydraulic syetem design are also mentioned here.the subject adopts integration method on the telescopic structure stress analysis and deformation analysis. The results of research and analysis are also compared in this part. The new design method is created through comparative analysis. And it is an useful guideline for the same type of aerial working platform.Key words: Aerial working platform; Structure design; The research of leveling system; The hydraulic cylinder目录摘要 (I)ABSTRACT (II)目录 (V)1 绪论 (1)1.1本课题的研究内容和意义 (1)1.1.1课题研究背景 (1)1.1.2 课题研究的意义 (1)1.2高空作业机械的国内外发展概况 (1)1.2.1高空作业机械的国外发展状况 (1)1.2.2高空作业机械的国内发展状况 (2)1.3高空作业车的组成 (2)1.3.1专用底盘 (2)1.3.2工作臂架 (3)1.3.3三维全旋机构 (3)1.3.4电气与液压系统 (3)1.3.5安全装置 (3)1.4课题研究的内容 (4)2伸缩臂结构分析 (5)2.1伸缩臂的结构 (5)2.2工况分析 (6)2.3伸缩臂强度计算分析 (6)2.3.1 危险工况1计算 (7)2.3.2 危险工况2计算 (7)2.4伸缩臂变形计算 (8)2.4.1 力学模型的建立 (8)2.4.2 弹性位移的计算 (9)2.4.3 计算结果 (12)2.5伸缩臂强度校核 (12)2.5.1计算基本臂臂的截面尺寸 (14)2.5.2对下臂进行正应力校核 (15)2.6本章小结 (16)3副车架结构及分析 (17)3.1副车架结构 (17)3.2支腿反力的计算 (17)3.3转台回转系统 (21)3.4本章小结 (22)4工作斗调平机构的研究 (23)4.1工作斗调平结构模型 (23)4.2调平机构液压系统 (25)4.3本章小结 (26)5液压油缸的设计计算 (27)5.1伸缩变幅油缸的结构 (27)5.2伸缩变幅油缸的设计计算 (27)5.2.1确定液压缸类型和安装方式 (27)5.2.2确定液压缸的主要性能参数和主要尺寸 (27)5.3本章小结 (31)6结论与展望 (32)6.1结论 (32)6.2展望 (32)致谢 (33)参考文献 (34)附录 (35)1 绪论1.1本课题的研究内容和意义1.1.1 课题研究背景现如今我国经济的飞速发展以及政府对基础设施建设的力度逐渐增大,高空作业平台的需求量不断增加,市场前景非常广阔。
然而由于我国对于高空作业平台的研究开发起步较晚,对其核心技术掌握的不足以及加工工艺的落后等方面的原因,使得我国高空作业产品的使用功能、安全性等方面得不到充分的质量保证。
通过对目前高空作业产品市场的发展趋势和广泛的市场研究,发现国内产品具有类型单一、设计粗糙等缺陷,无法满足很多特殊施工环境的要求[l],因此我国高空作业设备大多依赖进口。
虽然国外产品功能完善、性能比较优秀,但是由于价格太高,对很多建设公司或者施工方来说成本占用比例过大,使得利润空间降低。
因此,研发生产属于我国自主品牌的高性能的高空作业平台有着极其重要的经济价值和战略意义。
高空作业平台是用来运送工作人员和工作装备到指定高度进行作业的一种大型工程机械设备,并广泛用于电力、路灯、市政、园林、通信、机场、造(修)船、交通、广告、摄影等高空作业领域。
国家标准GB3608.93《高处作业分级》规定:VL在坠落高度基准面2m以上(含2m)有可能坠落的高处进行作业,都称为高处作业。
"因此为保障工人在高处作业的安全性,出现了越来越多的高空作业设备,然而随着科技的发展和人们对使用要求的增加,传统的高空作业设备已经无法满足人们的需求,专用高空作业平台技术在最近几十年来得以快速发展。
1.1.2 课题研究的意义随着社会的进步和发展,人们对于产品的人性化要求越来越高,因此在产品结构设计的过程中应坚持人性化思想[2],以人机工程学原理为指导充分分析研究产品各方面因素,提出相应的设计方案。
本课题在充分研究产品性能的基础上,对高空作业平台的功能模块进行了充分的结构分析,并根据其各方面的特殊性提出了相应的设计要求,指导其结构设计,因此课题研究的意义主要体现在以下几个方面:(1)通过本课题的研究,掌握混合臂高空作业车金属结构件的设计理论和分析方法,了解高空作业车结构件的工作规律,从而达到减轻自重、优化结构、提高可靠性的目的,为研制系列伸缩臂、混合臂高空作业车奠定良好的基础。
(2)对车载式高空作业平台进行模块划分,将其分为工作平台、操作系统、运动系统和支持系统几个部分进行分别研究,对每一部分进行充分的结构分析,结合产品的相关标准和设计原则,对其结构设计进行指导。
在课题的研究过程中结合产品的使用功能,通过计算机建模,在保证实现基本功能的基础上,总结相应的外观设计理论,以指导后续系列产品的结构设计,同时对于其它机械产品的外观设计研究具有一定的理论指导意义。
1.2 高空作业机械的国内外发展概况1.2.1 高空作业机械的国外发展状况高空作业车发展起步较早的欧美等发达国家和地区,从20世纪20年代就开始研制,发展历史久远,生产技术也很成熟,具有生产技术水平高、作业车的作业高度大、规格齐全、结构型式丰富、功能多样等优点。
总体来看,技术和市场均已很成熟,产品能够进行高空作业、抢险、救援、消防等复杂工作,作业平台的最大载荷可达500kg,最大作业高度已经超过100m,这是我国目前无法设计达到的高度,同时具有各种安全保护措施,很好的保障了工人的安全。
大型产品特点是科技含量高、研制与生产周期较长、投资大、市场容量有限,但市场竞争相对较少,产品的利润相对较高。
如美国Genie公司、JLG公司和法国HAULOTTE公司在高空作业平台产品都形成了系列化,与此同时,产品更新换代的周期明显缩短。
这大大提高了企业在国际市场中的竞争能力和企业的抗风险能力。
1.2.2 高空作业机械的国内发展状况我国产品在质量和性能上与国外优秀产品虽然存在一定的差距,但是随着科技的不断发展,产品的功能和性能已经逐渐趋于同质化[3],因此必须通过对我国高空作业机械产品与国外先进企业产品进行分析和比较,找出发展问题的之所在,并提出相应的解决方案。