飞行器姿态测量系统设计
四轴飞行器姿态控制算法

四轴飞行器姿态控制算法四轴飞行器姿态控制是指通过调整四个电机的转速,使得飞行器能够保持所需的姿态,例如平稳飞行、转弯、盘旋等。
姿态控制算法主要包括传感器采集、姿态估计和控制指令生成等几个部分。
以下将详细介绍四轴飞行器姿态控制的算法原理。
1.传感器采集:四轴飞行器通常会配备三个主要的传感器:加速度计、陀螺仪和磁力计。
加速度计用于测量飞行器的重力加速度,陀螺仪用于测量飞行器的角速度,磁力计用于测量地磁场强度。
这些传感器的数据将用于后续的姿态估计和控制。
2.姿态估计:姿态估计是根据传感器提供的数据计算出飞行器的当前姿态角。
一种常用的姿态估计方法是互补滤波器。
互补滤波器将加速度计和陀螺仪的数据进行融合,通过加速度计估计出的姿态角和陀螺仪估计出的姿态角进行加权平均,从而得到更准确的姿态估计。
3.控制指令生成:姿态控制器的目标是生成适当的转速指令,使得飞行器能够达到所需的姿态。
在四轴飞行器中,姿态控制通常分为俯仰控制、滚转控制和偏航控制三个方向。
俯仰控制用于调整飞行器的前后倾斜角度,滚转控制用于调整飞行器的左右倾斜角度,偏航控制用于调整飞行器的旋转角度。
在控制指令生成中,通常会采用PID控制器。
PID控制器根据目标姿态角和当前姿态角的误差,计算出相应的控制指令。
PID控制器包括三个参数:比例项、积分项和微分项。
比例项用于快速响应误差,积分项用于消除稳态误差,微分项用于抑制系统的振荡。
通过将三个方向的控制指令进行线性叠加,得到最终的转速指令。
转速指令将被发送到四个电机,控制它们的转速,从而实现飞行器的姿态调整。
值得注意的是,四轴飞行器还需要考虑到动力学和非线性因素。
动力学因素包括电机的动态响应和旋转惯量的影响,通常会使用动态模型进行补偿。
非线性因素包括旋翼的非线性动力学和空气动力学特性的影响,通常会采用非线性控制器进行补偿。
综上所述,四轴飞行器姿态控制算法主要包括传感器采集、姿态估计和控制指令生成等几个部分。
飞行器导航控制系统设计与实现

飞行器导航控制系统设计与实现随着航空技术的不断发展,飞行器导航控制系统的设计与实现也在不断升级和优化。
该系统是飞行器安全飞行的重要保障措施之一,需要满足高精度、高稳定性、高可靠性等要求。
一、概述飞行器导航控制系统是指在飞行器飞行过程中,实现导航、控制和监测的一套系统。
随着航空技术的迅速发展,该系统的要求也越来越高,必须满足多模态、高精度和全天候运行的需求。
二、系统组成1、惯性导航系统惯性导航系统是飞行器导航控制系统的重要组成部分,用于提供飞机的三维姿态信息(即俯仰角、滚转角和偏航角),同时也提供飞机的机动状态。
2、全球卫星定位系统(GPS)GPS提供高精度的位置和速度信息,一般用于飞行器的航线规划和飞行期间的导航控制。
3、气压计高度计气压计高度计主要用于测量飞机的高度,以确定飞行器的高度信息。
4、电子罗盘电子罗盘可以测量飞机的头向角,即航向角。
它通过测量地磁场来确定航向角。
5、飞行数据记录器飞行数据记录器用于记录飞机的运行状态和相关数据,以供后续分析和评估使用。
三、系统设计飞行器导航控制系统的设计要满足精度高、可靠性强、实时性好等要求。
下面是一些常见的设计要点:1、采用多重备份导航控制系统中的每个组件都有可能出现故障,因此必须采用多种备份措施,保证系统的稳定性和可靠性。
可以采用冗余设计或备件更换等方法来提高飞行器的安全性能。
2、强化通信导航控制系统和地面控制站之间需要进行通信,确保飞行器的实时控制和导航。
通信环节需要注意互联网安全以及保密性等方面的问题。
3、进行模拟仿真分析在设计导航控制系统时,可以采用模拟仿真分析的方式,模拟各种复杂的飞行情况,以评估系统的稳定性和性能。
这种方法能有效提高系统的可靠性和安全性。
四、系统实现系统实现需要依据设计方案对相关组件进行集成和测试,实现系统的正确运行。
在实现过程中,应该关注以下几个方面:1、功能实现导航控制系统的实现目标是保证飞行器的安全运行。
因此,系统实现必须能够准确地实现飞机的状态监测和控制。
航天飞行器导航与控制系统设计与仿真
航天飞行器导航与控制系统设计与仿真导语:航天飞行器是现代科技的巅峰之作,它的导航与控制系统是其正常运行和控制的核心。
本文将探讨航天飞行器导航与控制系统的设计原理、关键技术以及仿真模拟的重要性。
一、航天飞行器导航与控制系统设计原理航天飞行器的导航与控制系统设计原理主要包括三个方面,即姿态控制、导航定位和轨迹规划。
1. 姿态控制:姿态控制是指通过控制飞行器的各种运动参数,使其保持稳定的飞行姿态。
对于航天飞行器来说,由于外部环境的复杂性和飞行任务的特殊性,姿态控制尤为重要。
常用的姿态控制方法包括PID控制、模型预测控制和自适应控制等。
2. 导航定位:导航定位是指通过测量飞行器的位置和速度等参数,确定其在空间中的位置。
现代航天飞行器的导航定位通常采用多传感器融合的方式,包括惯性导航系统、卫星定位系统和地面测控系统等。
其中,卫星导航系统如GPS、北斗系统等具有广泛应用。
3. 轨迹规划:轨迹规划是指根据航天飞行器的飞行任务和外部环境的要求,确定其飞行轨迹和航线。
航天飞行器的轨迹规划需要考虑多个因素,如飞行器的运动特性、飞行任务的要求、空间障碍物等。
二、航天飞行器导航与控制系统的关键技术航天飞行器导航与控制系统设计离不开一些关键技术的支撑,其中包括:1. 传感器技术:传感器技术是导航与控制系统的基础,可以通过传感器对飞行器的姿态、速度、位置等进行准确测量。
陀螺仪、加速度计、GPS接收机等传感器设备的精度和稳定性对导航与控制系统的性能有着重要影响。
2. 控制算法:姿态控制和导航定位需要高效的控制算法来实现。
PID控制算法是常用的姿态控制方法,模型预测控制和自适应控制等算法则在一些特殊应用中得到了广泛应用。
对于导航定位,卡尔曼滤波和粒子滤波等算法可以很好地利用多传感器信息进行位置估计。
3. 轨迹规划算法:航天飞行器的轨迹规划需要考虑多个因素,如安全性、能耗等。
基于遗传算法和优化算法的轨迹规划方法可以在不同的约束条件下求解最优解。
哈工大《飞行器设计综合实验》高桦实验一
一、实验题目卫星姿态控制物理仿真实验二、实验目的1、掌握飞行器姿态控制系统的光纤陀螺传感器和喷气执行机构、飞行器姿态模拟单轴气浮实验转台、数字信号处理器DSP控制器的功能、性能及应用方法;2、通过演示实验,掌握飞行器姿态控制物理仿真实验原理;3、掌握控制算法和DSP软件开发技术及用C语言在飞行器姿态控制物理仿真专业技术中的应用编程及实验方法。
三、实验任务1、以喷气装置作为执行机构,编写C语言,进行软件设计、编程和实验调试。
2、完成单轴陀螺定姿的转台闭环控制实验,进行姿态角机动20°的控制。
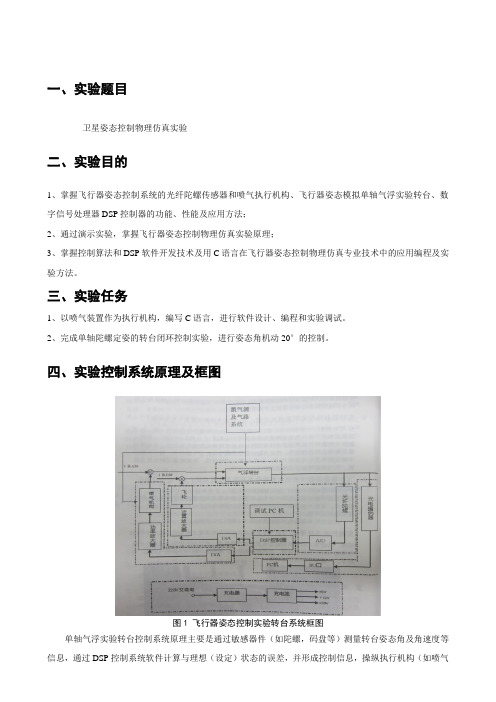
四、实验控制系统原理及框图图1 飞行器姿态控制实验转台系统框图单轴气浮实验转台控制系统原理主要是通过敏感器件(如陀螺,码盘等)测量转台姿态角及角速度等信息,通过DSP控制系统软件计算与理想(设定)状态的误差,并形成控制信息,操纵执行机构(如喷气装置,飞轮等),使转台回到设定位置。
五、控制算法及说明:喷气控制单回路姿态控制动力学方程为:dj T T J +=θ ,()00θθ=t ,()00θθ =t 式中,0θ、0θ 为姿态角、姿态角速度的初值,且00θθ =。
喷气推力器取为理想继电特性,并以线性姿态角θ作为反馈信号,当不计姿态角给定量(0=r θ)时,有控制方程0,0>-θj T()=t T j0,0<+θj T式中,0j T 为()t T j 的幅值。
系统的方框图如图2所示。
图2 喷气推理器取为理想继电特性的单回路姿态稳定系统方框图研究非线性控制系统常用的一种分析方法是相平面法,即在有姿态角θ和姿态角速度θ构成的直角坐标平面(相平面)上,研究θ与θ 间的运动轨迹(相轨迹),进而可获得关于系统过渡过程时间、超调量、极限环等主要姿控指标。
图3 理想喷气推理器的单回路姿态稳定系统的相轨迹图4 相平面法的DSP 实现原理图控制算法为0,≤+s U=U0,>-s U式中,U 为输出的控制量,f θ为角度预期值,M 为气浮转台的力矩,J 为气浮转台的转动惯量。
基于STM32单片机的无人机飞行控制系统设计

基于STM32单片机的无人机飞行控制系统设计基于STM32单片机的无人机飞行控制系统设计一、引言无人机作为一种高效、灵活的飞行器,已经广泛应用于农业、航空摄影、物流等领域。
无人机的飞行控制系统是实现无人机稳定飞行的核心部件,关乎到无人机的安全性和性能。
本文将基于STM32单片机,设计一种高效稳定的无人机飞行控制系统。
二、系统设计方案1. 硬件设计无人机飞行控制系统的硬件设计包括主控芯片选型、传感器选择与连接、无线通信模块等。
(1)主控芯片选型本系统选用STM32系列单片机作为主控芯片。
STM32单片机具有高性能、低功耗和丰富的外设接口等特点,适合用于嵌入式系统设计。
(2)传感器选择与连接无人机的稳定飞行依赖于姿态传感器、气压传感器等,用于实时测量无人机的姿态信息和气压信息。
通过SPI或I2C接口,将传感器与STM32单片机连接。
(3)无线通信模块为了实现与地面控制站的通信,本系统选用WiFi或蓝牙模块作为无线通信模块。
通过无线通信模块,实现无人机与地面控制站之间的数据传输和指令控制。
2. 软件设计无人机飞行控制系统的软件设计包括飞行控制算法的实现、通信协议的设计和图形界面开发等。
(1)飞行控制算法本系统采用PID控制算法实现无人机的稳定飞行。
PID控制算法能根据无人机的姿态信息,实时调整无人机的控制指令,使其保持稳定飞行。
(2)通信协议设计在无人机飞行控制系统中,需要设计一种通信协议,在无人机和地面控制站之间进行数据传输。
本系统采用串口通信协议,在硬件上通过UART接口实现无人机和地面控制站之间的数据交互。
(3)图形界面开发为了方便用户对无人机进行操作和监控,本系统设计了图形界面。
通过图形界面,用户可以实时查看无人机的姿态信息、图像传输和设置飞行参数等。
三、系统实现及测试在系统设计完成后,需要进行实际的硬件搭建和软件开发。
在硬件搭建过程中,需要将选用的传感器、无线通信模块等进行连接。
在软件开发过程中,需要编写飞行控制算法、通信协议和图形界面等。
飞行器控制系统设计及性能评估

飞行器控制系统设计及性能评估飞行器控制系统是飞行器的核心组成部分之一,负责飞行器的控制和导航任务。
在现代飞行器控制系统设计中,越来越多的采用了各种复杂的控制算法和高级传感技术,以确保飞行器能够实现更精确的控制、导航和飞行任务。
本文将就飞行器控制系统的设计和性能评估这两个方面进行论述,为读者提供有关该主题的详细信息。
一、飞行器控制系统设计在现代飞行器控制系统设计中,传感器、执行器、控制器等组件是必不可少的组成部分。
这些组件分别用于测量飞行器的状态、驱动飞行器舵面、以及实现控制和导航算法。
接下来我们将分别对这些组件进行讲解。
1. 传感器传感器是飞行器控制系统中最重要的组件之一,它能够测量飞行器的状态和环境信息,这些信息可以用于飞行器的控制和导航任务。
例如,加速度计和陀螺仪可以测量飞行器的加速度和角速度,从而计算出飞行器的速度和姿态;GPS接收机可以获取飞行器所在的经纬度和高度等信息,从而确定飞行器的位置。
传感器的种类繁多,根据任务需求,可以选择使用不同的传感器类型。
2. 执行器执行器是飞行器控制系统中另一个重要的组件,它可以驱动飞行器舵面来实现飞行器的控制和姿态调整。
执行器的种类也很多,例如电机、伺服马达、升降机、襟翼等。
在选用执行器时,需要考虑到任务需求、性能要求和成本等方面的因素。
3. 控制器控制器是飞行器控制系统中最核心的部件之一。
控制器的作用是根据传感器提供的状态信息,计算出需要调整的控制量,然后将调整信号发送给执行器。
现代控制器通常采用数字信号处理技术,并采用复杂的控制算法来实现更加精确的控制和导航任务。
例如,PID控制算法可以实现稳定的飞行姿态调整;LQG控制算法可以实现最优控制任务。
二、飞行器控制系统性能评估一旦飞行器控制系统被设计和实现完毕,就需要对其性能进行评估。
性能评估是评价飞行器控制系统能否满足任务需求的重要手段。
下面我们将就飞行器控制系统性能评估这一话题进行讲解。
1. 实验验证实验验证是飞行器控制系统性能评估的一个重要手段。
飞行器控制中的制导和姿态控制技术
飞行器控制中的制导和姿态控制技术飞行器作为现代航空运输工具的重要组成部分,其安全性和性能指标的提高,关系到人类文明进步、国家安全以及人民幸福的重大问题。
而制导与姿态控制技术则是飞行器控制系统的两个核心技术,其是否合理、高效、可靠,直接关系到飞行的安全、舒适性、运输效率和经济效益。
一、制导技术制导是指飞行过程中,通过指挥飞行器在所期望的轨道上自动或半自动飞行的一种技术。
制导系统的任务是自动或半自动地进行导航、规划、跟踪飞行轨迹,以及在允许范围内对轨迹误差进行补偿和校正。
常见的制导技术有惯性制导、GPS制导、光电制导及组合制导等。
其中惯性导航是最为常见的一种,其系统通过测量飞行载体加速度与角速度,以及改变速度和方向的环境载荷,计算出自身的飞行状态,进而实现导航与姿态控制。
而GPS制导、光电制导等技术则通过卫星信号和目标识别等手段,对飞行状态进行测量和矫正。
二、姿态控制技术姿态控制技术是指在飞行过程中,保持飞行器的稳定状态和期望的位置、方向和速度等参数,防止受到外界扰动而出现姿态失控、飞行不稳定等情况。
姿态控制系统对飞行器的姿态控制进行监视,并对不稳定的姿态状态进行补偿或控制,以实现飞行器的平稳、稳定地运行。
常见的姿态控制技术有PID反馈控制法、模型预测控制法、自适应控制法等。
PID控制法是一种传统的控制技术,通过对姿态转角误差、偏差和积分项等要素进行测算和控制,从而实现对飞行器姿态的控制。
模型预测控制法则是一种基于预测模型的控制技术,通过对飞行器状态和扰动进行预测,并对姿态进行补偿和控制,逐渐实现从预测精度转向实际精度的实时控制。
自适应控制法则通过对飞行器的复杂、不确定的动态特性进行建模和控制,实现了对飞行器姿态控制的更加高效和准确。
三、制导和姿态控制的结合制导与姿态控制两个技术的结合,协同作战,对飞行器的控制系统进行完美的设计和优化,不但可提高飞行器的性能和安全性,还能更好地适应不同的任务需求和环境变化。
飞行器控制系统设计与模拟
飞行器控制系统设计与模拟飞行器控制系统是航空领域中至关重要的一部分,它负责通过传感器和执行器实现对飞行器的控制和导航。
在本文中,将介绍飞行器控制系统的设计原理和模拟方法,以及在实际应用中的一些挑战和解决方案。
一、飞行器控制系统设计原理飞行器控制系统的设计原理可以分为三个主要部分:传感器、控制器和执行器。
1. 传感器传感器是飞行器系统中的关键组成部分,它通过感知环境中的物理量,并将其转化为电信号,以提供给控制器进行处理。
常见的飞行器传感器包括加速度计、陀螺仪、气压计、磁力计等。
加速度计用于测量线性加速度,可以帮助判断飞行器的姿态和运动状态;陀螺仪用于测量角速度,可以帮助判断飞行器的转动状态;气压计用于测量气压,可以帮助判断飞行器的高度;磁力计用于测量磁场强度,可以帮助判断飞行器的方向。
传感器的准确性对于飞行器的控制至关重要,因此在设计过程中需考虑噪声抑制和校准等因素。
2. 控制器控制器是飞行器控制系统的核心部分,它根据传感器提供的信息和预设的控制算法,通过计算和判断来生成相应的控制信号,以实现对飞行器的姿态和位置的控制。
常见的飞行器控制算法包括PID控制算法、状态反馈控制算法和模糊控制算法等。
PID控制算法是一种经典的控制算法,通过比较目标值和实际值的差异,根据比例、积分和微分三个参数来调整控制信号的大小。
状态反馈控制算法基于飞行器的数学模型,通过估计飞行器的状态变量并根据目标值进行调整。
模糊控制算法是一种基于模糊逻辑的控制算法,可以应对非线性和不确定性的飞行器控制问题。
3. 执行器执行器是控制器输出的信号在物理上作用于飞行器的装置,用于操纵飞行器的姿态和位置。
常见的飞行器执行器包括电动机、伺服阀和舵面等。
电动机通常用于控制飞行器的推力和动力系统;伺服阀用于控制飞行器的液压系统,如液压舵面和液压地平线;舵面用于控制飞行器的姿态变化,如副翼、升降舵和方向舵等。
执行器的稳定性和响应速度对于飞行器的控制效果至关重要,因此在设计过程中需考虑动力和机械的匹配和协调等因素。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
是否引证:否
15.1%(2045)
是否引证:否
14.8%(1998)
是否引证:否
14.1%(1909)
是否引证:否
10.6%(1431)
是否引证:否
9.3%(1255)
是否引证:否
9.2%(1238)
是否引证:否
9.1%(1225)
是否引证:否
8.7%(1173)
知 国 中 “
是否引证:否
8.7%(1173)
总字数:9928
13.1%(1305)
系
统
是否引证:否
11.1%(1098)
是否引证:否
3.3%(332)
是否引证:是
2.1%(210)
是否引证:否
2.0%(194)
是否引证:否
1.6%(158)
是否引证:否
1.2%(117)
是否引证:否
- 1 -
MEMS技术的发展与应用 刘成刚; - 《济南职业学院学报》- 2007-02-28 9 现代军用导航技术 马超杰,林志丹 - 《航空科学技术》- 2005-08-30 10 应用于MEMS中多孔硅显微结构及绝热性能的研究 崔梦(导师:胡明) - 《天津大学硕士论文》- 2004-12-01 11 MPU-6050模块角度算法处理及在嵌入式中的应用 邱云平;伍宝玉; - 《江西科技学院学报》- 2014-06-15 12 一种微机电系统器件的建模与仿真 王航宇; - 《北京电子科技学院学报》- 2007-12-15 13 基于SOC的MEMS双轴式数显倾角仪的研究 李晓豁;赵悦;姜鹤;朱兴梅; - 《机械》- 2010-01-25 14 浅谈物联网的技术特点及其广泛应用 刘陈;景兴红;董钢; - 《科学咨询(科技·管理)》- 2011-09-05 15 物联网核心技术专利态势分析——以MEMS技术为例 张运鸿;张善杰; - 《物流科技》- 2012-05-10 16 基于物联网的传感技术 子丰; - 《射频世界》- 2010-02-01 17 物联网发展应用给经济社会带来的影响 刘立琦; - 《物联网技术》- 2011-07-15 18 物联网传感器技术探讨 杨剑波;谭茜; - 《电信网技术》- 2011-12-15 19 便携式野外电法仪器故障检测装置的硬件设计 刘华(导师:陈一平) - 《中南大学硕士论文》- 2012-05-01 20 基于Nios 的直流电机PWM调速系统设计 陶东娅(导师:杨马英;何剑春) - 《浙江工业大学硕士论文》- 2009-05-01 21 MEMS-IMU/卫星组合导航技术研究与试验 王柬(导师:孙付平) - 《解放军信息工程大学硕士论文》- 2008-04-20 22 微机电系统发展的新动向 苑国良 - 《世界制造技术与装备市场》- 2005-10-10 23 Power ME MS研究现状及展望 甘霖,李伟,杨灿军,刘宜胜,宋瑞银,黎嘉杰 - 《机床与液压》- 2004-09-30 24 微电子机械系统的发展与应用 胡雪梅;王宏颖; - 《西安航空技术高等专科学校学报》- 2006-05-20 25 微机电系统的研究及应用 丁群燕;曾鑫; - 《装备制造技术》- 2008-07-15 26 浅议微电子机械系统 白木,周洁 - 《中国机电工业》- 2002-06-20 27 微电子机械系统的研究进展 李炳乾,朱长纯,刘君华 - 《国外电子元器件》- 2001-01-22 28 微机械传动技术概述 乔绪维;辛洪兵; - 《机械传动》- 2010-11-15 29 GPS/INS组合导航系统研究 黄兵超(导师:李纲) - 《国防科学技术大学硕士论文》- 2010-11-01 30 MEMS的应用及发展前景 刘虹,刘洁,杨立峰 - 《云南电大学报》- 2003-09-30 31 捷联惯导系统姿态解算模块的实现 杜海龙;张荣辉;刘平;郑喜凤;贾宏光;马海涛; - 《光学精密工程》- 2008-10-15
是否引证:否
8.3%(1126)
是否引证:否
8.1%(1099)
是否引证:否
8.1%(1099)
网
是否引证:否
7.9%(1066)
”
是否引证:否
7.7%(1036)
大
是否引证:否
7.6%(1033)
- 3 -
学
是否引证:否
7否
7.4%(998)
是否引证:否
7.1%(958)
是否引证:否
6.5%(876)
是否引证:否
5.5%(748)
系
是否引证:否
5.2%(699)
统
是否引证:否
4.9%(663)
是否引证:否
是否引证:否
0.4%(44)
是否引证:否
0.4%(44)
是否引证:否
0.4%(44)
是否引证:否
0.4%(44)
系
统
是否引证:否
0.4%(36)
是否引证:否
0.3%(34)
是否引证:否
0.3%(32)
是否引证:否 总字数:13514
20.4%(2762)
是否引证:否
18.2%(2466)
- 《大学生论文联合比对库》- 2014-06-02 3 基于STM32的人体姿态检测系统的设计与研究 沈威 - 《大学生论文联合比对库》- 2014-05-14 4 基于车载传感器的路面质量监测系统的设计和实现 徐庆江(导师:彭刚) - 《华中科技大学硕士论文》- 2012-01-的电动车动力电池管理系统 张正扬(导师:刘方) - 《南京航空航天大学硕士论文》- 2013-12-01 7 智能无线供电系统的设计与制作 陈大柱 - 《大学生论文联合比对库》- 2014-05-15 8 基于STM32的远程网络控制 翁开涛 - 《大学生论文联合比对库》- 2014-05-20 9 嵌入式RFID读卡器和无源标签设计 贺超阳 - 《大学生论文联合比对库》- 2014-05-08 10 11072_080602_200906060128 陈鹏 - 《大学生论文联合比对库》- 2013-06-20 11 11072_080602_200906060128 - 《大学生论文联合比对库》- 2013-07-10 12 岩石破裂次声探测技术与信号特征研究 朱星(导师:许强) - 《成都理工大学博士论文》- 2014-04-15 13 朱明想-100509054014-蔬菜大棚智能控制系统 朱明想 - 《大学生论文联合比对库》- 2014-05-23 14 论文-朱明想 - 《大学生论文联合比对库》- 2014-06-13 15 03100618胡凯政(姚桂锦) - 《大学生论文联合比对库》- 2014-04-22 16 刘雨霆_10031127_石油管道管径测量设备控制电路的设计与编程、调试 刘雨霆 - 《大学生论文联合比对库》- 2014-06-19 17 12010093019-王其凡-单片机测速与语音提示系统的设计-初稿 王其凡 - 《大学生论文联合比对库》- 2014-05-23 18 12010093019_王其凡_单片机测速与语音提示系统的设计论文终稿 王其凡 - 《大学生论文联合比对库》- 2014-06-05 19 谢志伟_201030601773_基于以太网的太阳能电池监控系统的实现 谢志伟 - 《大学生论文联合比对库》- 2014-06-03 20 通信-3090731119-陈超凡 通信 - 《大学生论文联合比对库》- 2013-05-21 21 毕业设计论文-高海振 - 无附件 高海振 - 《大学生论文联合比对库》- 2013-05-31 22 黄雄_自动化102_徐致远 徐致远 - 《大学生论文联合比对库》- 2014-06-05 23 13262_080606_080110021129左浩 - 《大学生论文联合比对库》24 基于STM32F107VCT6平台的I~2C总线使用技术研究 胡洪坡;钱宗锋;郑建国;余大波; - 《山西电子技术》- 2013-10-15 25 基于ARMcortex的远程控制系统升级的设计与实现 邬锦彬 - 《大学生论文联合比对库》- 2014-05-29 26 微型四旋翼飞行器实验平台的设计 巨星(导师:郝真鸣) - 《河北大学硕士论文》- 2014-06-01 27 基于nRF24L01的主动式电子标签的设计 唐磋;章国安;张之江;袁桅; - 《微计算机信息》- 2010-02-15 28 基于ARM的汽车防酒后驾驶及防盗系统设计 杨志刚(导师:孟立凡) - 《中北大学硕士论文》- 2014-05-28 29 嵌入式系统中GPIO模拟SPI总线主/从双向通信的设计与实现 孙松; - 《自动化技术与应用》- 2007-10-25
知 国 中 “
[8692] [2] 脚注与尾注:0
网
检测结果 总文字复制比:37.1% 去除引用文献复制比:35.6% 单篇最大文字复制比:11.8% 重复字数: 总段落数: 指
去除本人已发表文献复制比:37.1%
” 大
[23442]
学 生
总字数:
单篇最大重复字数:
[2762]
前部重合字数:[1512]
疑似段落最大重合字数:[5505] 疑似段落最小重合字数:[3187]
疑似段落数:[2] 标: 剽窃观点 一稿多投 表格:0
后部重合字数:[7180] 剽窃文字表述 自我剽窃 过度引用 整体剽窃
论
文
重复发表
管
32.1%(3187) 40.7%(5505)
飞行器姿态测量系统设计_第1部分(总9928字) 飞行器姿态测量系统设计_第2部分(总13514字)
理
1. 飞行器姿态测量系统设计_第1部分
相似文献列表 文字复制比:32.1%(3187) 剽窃观点:(0) 1 基于GMR传感器的姿态测量系统设计 林亚坤(导师:钱正洪) - 《杭州电子科技大学硕士论文》- 2013-12-01 2 无人机姿态测量系统设计实现 穆振兴(导师:曾庆双) - 《哈尔滨工业大学硕士论文》- 2009-06-01 3 基于STM32的捷联惯性测量系统设计 姜建飞(导师:张永;马国梁) - 《南京理工大学硕士论文》- 2014-02-01 4 基于微控制器系统的照片彩显设计与实现 程山 - 《大学生论文联合比对库》- 2014-06-01 5 基于si4432的高性能无线收发系统设计 许永通(导师:冯涛) - 《杭州电子科技大学硕士论文》- 2013-12-01 6 基于STM32的MEMS惯性传感器姿态检测系统 潘昊 - 《大学生论文联合比对库》- 2013-05-15 7 基于MEMS技术的惯性测量器件及系统的发展现状和应用 文炜; - 《飞航导弹》- 2006-09-05