新方法进行三角高程测量的原理
三角高程测量原理及公式

三角高程测量
一、三角高程测量原理
(一)适用于:地形起伏大的地区进行高程控制。
实践证明,电磁波三角高程的精度可以达到四等水准的要求。
(二)原理
注意:当两点距离较大(大于300m )时:
1、 加球气差改正数:
B 点的高程:
AB A B h H H += l
i S h l i D h AB AB -+=-+=ααsin tan
即有: 2、可采用对向观测后取平均的方法,抵消球气差的影响。
球差为正,气差为负
二、三角高程测量的观测和计算
①安置经纬仪于测站上,量取仪高i 和目标高s 。
读 至0.5cm ,量取两次的结果之差≤1cm 时,取平均值。
②当中丝瞄准目标时,将竖盘指标水准管气泡居中,读取竖盘读数。
必须以盘左、盘右进行观测。
③竖直角观测测回数与限差应符合规定。
④用电磁波测距仪测量两点间的倾斜距离D ’,或用三角测量方法计算得两点间的水平距离D 。
f
l Dtg i h AB +-+=α即有: R
D f 243.0=。
三角高程测量
§4-6 三角高程测量一、三角高程测量原理及公式在山区或地形起伏较大的地区测定地面点高程时,采用水准测量进行高程测量一般难以进行,故实际工作中常采用三角高程测量的方法施测。
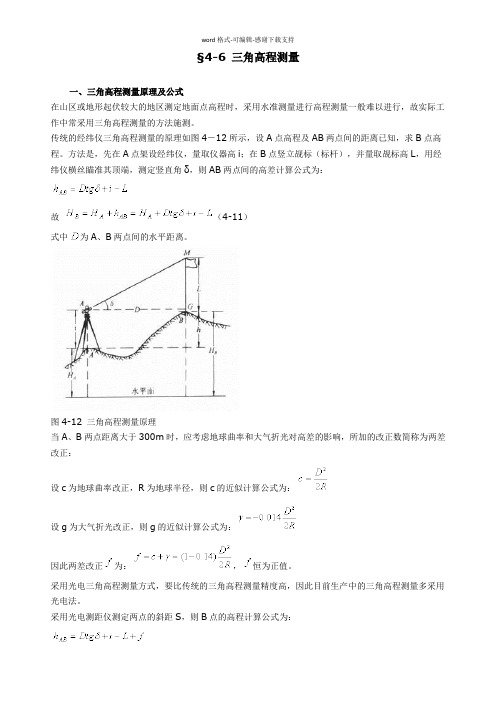
传统的经纬仪三角高程测量的原理如图4-12所示,设A点高程及AB两点间的距离已知,求B点高程。
方法是,先在A点架设经纬仪,量取仪器高i;在B点竖立觇标(标杆),并量取觇标高L,用经纬仪横丝瞄准其顶端,测定竖直角δ,则AB两点间的高差计算公式为:故(4-11)式中为A、B两点间的水平距离。
图4-12 三角高程测量原理当A、B两点距离大于300m时,应考虑地球曲率和大气折光对高差的影响,所加的改正数简称为两差改正:设c为地球曲率改正,R为地球半径,则c的近似计算公式为:设g为大气折光改正,则g的近似计算公式为:因此两差改正为:,恒为正值。
采用光电三角高程测量方式,要比传统的三角高程测量精度高,因此目前生产中的三角高程测量多采用光电法。
采用光电测距仪测定两点的斜距S,则B点的高程计算公式为:(4-12)为了消除一些外界误差对三角高程测量的影响,通常在两点间进行对向观测,即测定hAB和hBA,最后取其平均值,由于hAB和hBA反号,因此可以抵销。
实际工作中,光电三角高程测量视距长度不应超过1km,垂直角不得超过15°。
理论分析和实验结果都已证实,在地面坡度不超过8度,距离在1.5km以内,采取一定的措施,电磁波测距三角高程可以替代三、四等水准测量。
当已知地面两点间的水平距离或采用光电三角高程测量方法时,垂直角的观测精度是影响三角高程测量的精度主要因素。
二、光电三角高程测量方法光电三角高程测量需要依据规范要求进行,如《公路勘测规范》中光电三角高程测量具体要求见表4-6。
表4-6 光电三角高程测量技术要求往返各注:表4-6中为光电测距边长度。
对于单点的光电高程测量,为了提高观测精度和可靠性,一般在两个以上的已知高程点上设站对待测点进行观测,最后取高程的平均值作为所求点的高程。
高程测量—三角高程测量(工程测量课件)

三角高程测量案例
C目 录 ONTENTS 1 三角高程测量方法(复习) 2 三角高程测量案例
1 三角高程测量方法
三
角
3.用全站仪观测竖直
高 程 测
角和水平距离,竖直 角观测1~2测回,取 平均值作为最后结果。
量
方 法
1.安置仪器于 测站点;量出
仪器高。
2.棱镜立于 测点上,量 出觇标高。
三 角
平距离和观测的 竖直角计算两点 之间的高差。
高
程
测
hAB DAB tan i l
量
原
理
原理公式
2 三角高程测量方法三源自角3.用全站仪观测竖直
高 程 测
角和水平距离,竖直 角观测1~2测回,取 平均值作为最后结果。
量
方 法
1.安置仪器于 测站点;量出
仪器高。
2.棱镜立于 测点上,量 出觇标高。
三
hhABABDDABABtatannAAiAiAlBlB
角 高 程 测
hhBABADDABABtatannBBiBiBlAlA
11 hh平平均均22(h(hABABhhBABA))
量
方 法 4.计算
2 三角高程测量案例
A、B 两点间水平距离为341.22m ,在A点设 站照准B点测得垂直角为 A 140628 , 仪器高 iA 1.30m,觇标高 lB 1.80m,在B 点设站照准A点测得垂直角为 B 135905, 仪器高 lA 1.60m ,觇标高 iB 1.40m 。求 A、B 两点间的高差。
案例
直觇: hAB D AB tan A iA lB 341.22 tan140628 1.30 - 1.80 85.258m
全站仪三角高程测量的原理、方法、精度分析

摘要在工程建设的勘测、施工中常常涉及到高程测量,现场采用的测量方法主要是水准测量和三角高程测量。
水准测量精度高,但是速度比较慢,效率低。
此外,水准测量的转点多,而且标尺与仪器也存在下沉误差,如果在丘陵、山区等地使用水准测量进行高程传递是非常困难的,有时甚至是不可能的。
近些年来,由于全站仪的发展,使得测角、测距的精度不断提高。
三角高程测量传递高程比较灵活、方便、受地形条件限制较少等优点,因此全站仪三角高程测量补充了水准测量不能在山区等地形起伏较大的地区施测的不足,成为水准测量的重要方法。
本文对全站仪三角高程测量的原理、方法、精度等进行了分析,认为用全站仪代替水准仪进行高程测量,在一定范围内可达到三等水准测量要求。
关键词:全站仪三角高程精度分析等级水准AbstractIn the construction survey, construction often involve the height measurement, the scene is the leveling measurement method is mainly used and trigonometric leveling. Leveling precision, but at a slower speed, low efficiency. In addition, the turning point of leveling and gauge and instrument is also sinking error, if in the hills, mountains and other places using the leveling elevation transfer is very difficult, sometimes even impossible. In recent years, due to the development of the total station, the accuracy of Angle, distance to improve. Trigonometric leveling elevation is more flexible and convenient, and the advantages of less restricted by terrain conditions, so the triangle elevation surveying added leveling can't in mountainous terrain volatile regions such as measured by the insufficiency, has become an important method of leveling. In this paper, the principle and method of total station triangle elevation measurement, precision are analyzed, such as that using total station to replace the level height measurement, within a certain range can be up to three, the fourth level measurement requirements.Key Words:Total station, Triangle elevation, Accuracy analysis, Order leveling目录摘要 (I)ABSTRACT (II)第1章绪论 (1)1.1 前言 (1)1.1.1 研究目的与意义 (1)1.2 国内外研究现状 (2)1.2.1 国内研究现状 (2)1.2.2 国外研究现状 (2)1.3 本文研究内容 (3)第2章全站仪三角高程测量原理和观测方法 (4)2.1 全站仪三角高程的基本理论 (4)2.1.1 全站仪三角高程测量的原理 (4)2.1.2三角高程测量的基本公式 (5)2.2 全站仪三角高程测量的方法 (7)2.2.1对向观测法 (7)2.2.2中间测量法 (8)第3章三角高程与几何水准高程误差及精度的对比研究 (9)3.1 全站仪对向观测法的精度分析 (9)3.2 全站仪中间观测法的精度分析 (11)3.3 三角高程测量方法的比较 (13)第4章实例分析 (15)4.1 测量过程 (15)4.2 观测结果分析 (17)第5章结论与展望 (19)致谢 (20)参考文献 (21)第1章绪论1.1 前言测量地面待定点的高程,传统的方法是通过仪器测量待测点与已知点间的高差,然后计算出待测点的高程。
三角高程测量原理、误差分析及应用(精)

三角高程测量1 三角高程测量的基本原理三角高程测量是通过观测两点间的水平距离和天顶距(或高度角)求定两点间的高差的方法。
它观测方法简单,不受地形条件限制,是测定大地控制点高程的基本方法。
目前,由于水准测量方法的发展,它已经退居次要位置,但在山区和丘陵地带依然被广泛采用。
在三角高程测量中,我们需要使用全站仪或者经纬仪测量出两点之间的距离(水平距离或者斜距和高度角,以及测量时的仪器高和棱镜高,然后根据三角高程测量的公式推算出待测点的高程。
由图中各个观测量的表示方法,AB两点间高差的公式为:h=S0tanα+i1-i2 ①但是,在实际的三角高程测量中,地球曲率、大气折光等因素对测量结果精度的影响非常大,必须纳入考虑分析的范围。
因而,出现了各种不同的三角高程测量方法,主要分为:单向观测法,对向观测法,以及中间观测法。
1.1 单向观测法单向观测法是最基本最简单的三角高程测量方法,它直接在已知点对待测点进行观测,然后在①式的基础上加上大气折光和地球曲率的改正,就得到待测点的高程。
这种方法操作简单,但是大气折光和地球曲率的改正不便计算,因而精度相对较低。
1.2 对向观测法对向观测法是目前使用比较多的一种方法。
对向观测法同样要在A点设站进行观测,不同的是在此同时,还在B点设站,在A架设棱镜进行对向观测。
从而就可以得到两个观测量:直觇:hAB= S往tanα往+i往-v往+c往+r往②反觇:hBA= S返tanα返+i返-v返+c返+r返③S——A、B间的水平距离;α——观测时的高度角;i——仪器高;v——棱镜高;c——地球曲率改正;r——大气折光改正。
然后对两次观测所得高差的结果取平均值,就可以得到A、B两点之间的高差值。
由于是在同时进行的对向观测,而观测时的路径也是一样的,因而,可以认为在观测过程中,地球曲率和大气折光对往返两次观测的影响相同。
所以在对向观测法中可以将它们消除掉。
h=0.5(h AB- h BA=0.5[( S往tanα往+i往-v往+c往+r往-( S返tanα返+i返-v返+c返+r返]=0.5(S往tanα往-S返tanα返+i往-i返+v返-v往④与单向观测法相比,对向观测法不用考虑地球曲率和大气折光的影响,具有明显的优势,而且所测得的高差也比单向观测法精确。
三角高程测量技术的原理与应用
三角高程测量技术的原理与应用引言:三角高程测量技术是一种用于确定地面上各点的高程差的技术,广泛应用于土地测量、建筑工程、地质勘探等领域。
本文将介绍三角高程测量技术的原理以及其在实际应用中的一些案例。
一、三角高程测量技术的原理三角高程测量技术基于三角形的几何性质,利用三角形的内角和外角之和等于180°的特点,通过测量三角形内角或边长的变化来计算高程差。
1.三角形的内角和在平面几何中,三角形的内角和总是等于180°。
通过测量三角形的内角和可以计算出与地面平行的三角形的高程差。
2.三角形的边长比例当两个三角形有一个共边时,它们的边长比例与高程差之间存在一定的关系。
根据这个关系可以通过测量两个三角形的边长比例来计算高程差。
3.水平仪水平仪是一种测量仪器,可以用来测量物体相对于地面的水平度。
通过水平仪可以测量物体的高度差,并计算出高程差。
二、三角高程测量技术的应用案例三角高程测量技术在土地测量、建筑工程和地质勘探等领域有着广泛的应用。
下面将分别介绍这些领域中的一些应用案例。
1.土地测量在土地测量中,三角高程测量技术可以用于确定不同地块之间的高程差,从而帮助规划和设计土地利用。
例如,在城市规划中,通过测量不同街区的高程差,可以确定出最佳的排水系统设计,以应对雨水的排放。
2.建筑工程在建筑工程中,三角高程测量技术可以用于确定建筑物的高程差,从而保证建筑物的平整度和垂直度。
例如,在建造高楼大厦时,通过测量建筑物不同层之间的高程差,可以确保整个建筑物的垂直度。
3.地质勘探在地质勘探中,三角高程测量技术可以用于确定地质构造的高程差,从而提供地质勘探的基础数据。
例如,在勘探矿产资源时,通过测量不同地质构造点的高程差,可以确定出矿石的分布情况。
三、三角高程测量技术的优势与难点1.优势三角高程测量技术具有测量范围广、测量精度高的优势。
由于三角测量是一种基于三角形几何性质的测量方法,可以适用于不同尺度和不同地形的测量需求。
(完整版)三角高程测量
32
2020年8月9日星期日
四、偏心误差系数的测定
基本原理:因为相对观测竖角(绝对值) 的平均值可消除竖盘偏心的影响,因此也可 通过相对观测的竖角来反映偏心误差。
测定步骤 1.为了减小竖盘指标差的影响,在平坦 地区选择两个相距约50m的固定点A、B, 在两点上竖立标尺,如图10-8所示。
33
2020年8月9日星期日
α=(R–L-180°)/2
=(278°12′24″- 81°47′36″- 180°)
= + 8°12′24″
12
2020年8月9日星期日
对高度角式注记,竖直角的计算 当竖直角为仰角时(参考前面的示意图)
α左 = L - 0° α右 = 180°- R α= (L – R + 180°)/2 (a) 当竖直角为俯角时
竖盘指标水准管
竖盘指标水准 管微动螺旋
6
图中3号螺旋为 竖盘指标水准管 微动螺旋
2020年8月9日星期日
2.竖盘的注记形式 顺时针,逆时针。
望远镜水平时,竖盘读数为90°的整倍数。
竖盘逆时针注记(盘左高度角式)
7
2020年8月9日星期日
竖盘顺时针注记(盘左天顶距式)
8
2020年8月9日星期日
3.竖角的表示形式
• 计算竖直角:各按三丝所测得的L和R分别计算出相应
的竖角,最后取平均值为该竖角的角值。
22
2020年8月9日星期日
五、指标差的检验与校正
1.测定指标差 盘左、盘右瞄准同一明显目标,观测多个测回 求得指标差。 2.求出盘左或盘右的正确读数(读数减指标 差)。 3.微调竖盘指标水准管,使竖盘位于正确读数。 4.调节竖盘水准管校正螺丝,使气泡居中。
简析三角高程测量新方法原理

简析三角高程测量新方法原理三角高程测量是工程施工中传递高程的一种基本的测量方法,由于传统的三角高程测量精度不仅受大气折光、垂直角观测精度等因素影响,更重要的是受量取仪器的高度产生的垂线偏差因素影响,故在施工单位中使用并不广泛,随着几何水准测量的发展,几何水准测量成为了精密高程控制的主要方法,而使传统的三角高程测量只是在一些特殊情况下(如山区、丘陵区等高差较大地区)的几何水准测量的补充。
近几年,随着国内高速铁路大规模的建设,而高速铁路多设计为高架路段,桥梁工程所占比例在70%以上,有的桥长达几十公里,要保证桥上的无砟轨道高程定位精度达到±1mm,如何将地面上的高程精确地引测到十几米高的桥面上,这是施工单位所必须要解决的测量难题。
根据无砟轨道施工精度要求,桥上每2km左右应引测一个二等水准点,若采用精密几何水准测量法,不仅实施难度非常大且精度也难以保证,而传统的三角高程测量虽然现场实施较简单,但是受大气折光、垂直角及垂线偏差等因素影响,就很难满足精度要求。
要实现把地面上的高程高精度地引测至桥上,若采用三角测量方法,关键是要消除仪器高度产生的垂线偏差的影响。
三角高程测量新方法的原理新方法的原理:就是全站仪任意点设站,后视地面上已知的高程控制点,前视待测高程点,设定前后视点上的棱镜高度一致,在测量过程中不需要量取仪器高和棱镜高,测量完成后推算出待测点的高程。
A点为地面已知高程点,B点为待求高程点,为了测量A点与B点间高差,在中间位置设立全站仪,A点与B点处分别安置等高棱镜组,利用三角高程测量原理可得(暂不考虑大气折光因素):HA+V-△h1=HB+V-△h2则A点与B点间高差△HA-B为:△HA-B=HB-HA=△h2-△h1 (1)由上式可知,A点与B点间高差已自行消除了仪器高和棱镜高,故影响三角高程测量精度的一个重要因素就消除了。
三角高程测量新方法的计算公式及精度分析1、单向观测三角高程测量高差的计算公式:(2)或:(3)式中 -------------三角高程测量的高差;-------------全站仪至棱镜的斜距;--------------全站仪至棱镜的平距;--------------垂直角;---------------全站仪高度;--------------棱镜高;-------------地球平均曲率半径,约为6370km;-------------大气垂直折光系数,根据实际情况一般取0.08~0.14;2、单向观测三角高程测量高差的误差计算公式:(4)因新方法中是不需要量取仪器高和棱镜高的,故不存在仪器高和棱镜高的误差的,则式(4)可变换为:(5)3、测量精度分析:由式(5)可知,单向观测三角高程测量高差的误差只与距离、垂直角的误差和两气差有关,因此A点与B点间的高差计算公式为:(6)或:(7)由上式可推导出A点与B点的高差误差公式为:(8)单向观测三角测量误差分析如下:采用测角精度2"、测距精度2mm±(2*D)ppm全站仪和带气泡的对中杆棱镜组进行三角高程测量时,即、,控制测距在250m以内,垂直角在28°以内,球气差误差一般按()进行计算,則可达到三、四等水准精度(三等为,四等);若采用测角精度1"、测距精度1mm±(1*D)ppm全站仪、强制归心安装精密棱镜组,进行三角高程测量时,控制测距在100m之内、垂直角在25°以内,则可达到二等水准精度,即三角高程测量新方法的应用石武客运专线河北段,大部分路段为高架桥,架梁后桥面与地面的平均高差在20m左右,而根据无砟轨道施工要求,每2km一处应从地面高程控制点引测至桥面上。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
精密三角高程测量
一、 精密三角高程测量的原理
如图1,为了测量点A 到点B 的高差,在O 处安置全站仪、A 处安置棱镜,测得OA 的距离A S 和垂直角A α,从而计算O 点处全站仪中心的高程O H
o H =A H +A L -A h ∆
(1)
然后再在过度点1I 处安置棱镜,测得O 1I 的距离1S 和垂直角1α,从而计算1I 点处高程1H
1
H =0H +1h ∆-1L (2)
点A 和点1I 高差为1o h
1o h =0H +1h ∆-1L -(o H -A L +A h ∆)
=1h ∆-A h ∆+A L -1L (3)
图 1
然后在下一个转点1O I 处架设仪器,将原A 点的棱镜架设到2I ,1I 处的棱镜旋转与1O 处的全站仪对准。
同理可计算出1I 和2I 两点高差12h
12h =2h ∆-'
∆1h +1L -2L (4)
同理可得第I 点与B 点的高差为iB h
iB h =B h ∆-'
∆i
h +i L -B L (5)
点A 和点B 高差AB ∆H 为
AB ∆H =1o h +12h +…+iB h
=1h ∆-A h ∆+2h ∆-'∆1h +…+B h ∆-'∆i h +A L -B L (6) 从上式可看出,欲求的点A 和点B 的高差中已消去了个转点棱镜高, 并且与仪器高无关,也就不存在量取仪器高,只需精确量取起点和终点的棱镜高。
从而大大减小了量取仪器高和棱镜高而引起的误差。
二、三角高程测量的精度分析
1.单向观测三角高程测量高差的计算公式为
v i R
s k s -+⨯-+=∆2cos )1(sin h 22α
α
(7)
式中,h ∆为三角高程测量的高差,s 为仪器到棱镜的斜距; α为垂直角,k 为大气垂直折光系数,k=1.14,R 为地球平均曲率半径,R = 6 370 km; i 为仪器高;v 为规牌高或棱镜高。
三、单向观测三角高程测量高差的误差公式为
222
2
22222cos )(sin v i k s h
m m m R s m s m m ++∙⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣
⎡+=∆ρααα (8)
从上式可知单向观测三角高程测量高差的误差与距离、垂直角的误差,大气折光误差和量测仪器高、棱镜高误差有关。
其中: ① 测距误差对对高差的影响与垂直角α有关,一般的中短程全站仪的测距精度为D m =(5+5×610-D )㎜,它对高差精度的影响很小。
② 测角误差αm 对高差的影响随着水平距离的增加成正比例增大,其影响远远超过测距误差,是制约高差精度的主要误差来源。
③ 大气垂直折光误差2k m 的公式可以看出在距离不大时,对高差精度的影响很小。
④ 对于新的三角高程测量方法,由于量测仪器高、棱镜高误差只与起点和终点有关,故只考虑起点和终点的量高误差,所
以(8)式中认为可去掉2i m 和2
v m 两项。
故点A 到点B 高差的计算公式为
AB ∆H =1o h +12h +…+iB h
=1h ∆-A h ∆+2h ∆-'∆1h +…+B h ∆-'∆i h +A L -B L (9) 点A 到点B 高差中误差hAB m ∆的计算
222221222212m LB LA hB i h h h hA h hAB m m m m m m m m ∆∆'∆'∆∆∆∆∆++++++++= (10)
当采用高精度的全站仪测量距离和垂直角,AB 点的 高差能达到什么精度呢? 四、实验设计思想:
1,现令:5.1m ''±=α,mm 5.1m s ±=
按照s≤100m, ≤30°原则设计闭合水准路线,采用新三角高程测量方法测得若干点的高程,最后用严格平差法进行平差,并计算精度。
2,沿相同的闭合水准路线用一等或二等水准测量进行复测,对测量数据用严格平差法进行平差并计算精度。
3,比较两种方法的精度,并对两种方法进行分析,总结实验。
五、观测要求
1、垂直角的观测
2、
参考文献:
张华海应用大地测量学中国矿业大学出版社2008年。