基于ANSYS WORKBENCH的六自由度机械臂有限元分析及结构优化
基于ANSYS的滑移装载机动臂有限元分析与优化
基于ANSYS的滑移装载机动臂有限元分析与优化一、引言滑移装载机是目前应用较为广泛的一种工程机械,其具有灵活、高效的特点,能够适应不同地形和作业环境的需要。
而作为滑移装载机的重要组成部分之一的机动臂,其结构设计和性能优化对于整个机器的使用效果和使用寿命具有重要的影响。
在机动臂的设计过程中,采用有限元分析方法对其进行分析和优化,能够有效地提高机动臂的性能和使用寿命。
二、机动臂的结构和工作环境滑移装载机的机动臂一般由臂体、臂杆和液压缸等部分组成。
在工作时,机动臂需要承受较大的载荷和振动,因此对于机动臂的结构强度和耐久性有着较高的要求。
由于机动臂在工作过程中需要做出各种角度和位置的调整,因此在设计过程中还需要考虑其动力学性能和运动稳定性。
三、有限元分析的原理和方法有限元分析是一种结构分析的方法,通过将整个结构分割成有限个小单元,然后通过求解每个小单元的力学行为来得到整个结构的响应。
有限元分析技术在工程领域已经得到了广泛的应用,通过对结构进行有限元分析,可以得到结构的应力、位移、振动等性能指标,帮助设计人员优化结构设计。
本文将采用ANSYS软件对滑移装载机机动臂进行有限元分析。
首先需要建立机动臂的三维模型,然后将其网格化,最后通过施加载荷和边界条件,得到机动臂在不同工况下的应力、位移等性能指标。
1.建立机动臂的三维模型在进行有限元分析之前,需要先建立机动臂的三维模型。
通过CAD软件可以建立出相应的三维模型,并将其转换成ANSYS软件可以识别的格式。
2.网格化将三维模型分割成有限个小单元是有限元分析的第一步,也是最关键的一步。
通过ANSYS软件中的网格划分功能,可以将整个机动臂模型分割成有限个小单元,以便后续的分析。
3.施加载荷和边界条件在进行有限元分析之前,需要确定机动臂的工作条件和受力情况,在ANSYS中可以根据实际工况施加相应的载荷和边界条件,然后进行力学分析求解。
4.得到机动臂的应力、位移等性能指标通过有限元分析可以得到机动臂在不同工况下的应力、位移等性能指标,这些指标可以帮助设计人员评估机动臂的结构强度和稳定性,并进行相应的优化。
基于ANSYS的滑移装载机动臂有限元分析与优化
基于ANSYS的滑移装载机动臂有限元分析与优化引言滑移装载机(也称为滑移装载机)是一种用于装运和卸载材料的重型机械设备,通常用于建筑和土木工程领域。
其主要部件之一是动臂,用于支撑和操作斗齿进行装载工作。
为了提高滑移装载机的工作效率和安全性,有限元分析和优化成为了必不可少的工具。
本文旨在通过使用ANSYS软件对滑移装载机动臂进行有限元分析,并通过优化设计来提高其性能和寿命。
一、动臂结构分析1. 动臂结构设计滑移装载机动臂通常由钢材制成,具有复杂的结构形式,包括主梁、支撑臂、铰接部件等。
在设计动臂时需要考虑到承载能力、刚度、重量和成本等因素,以确保其具有足够的强度和刚度来承受工作中的压力和载荷。
在设计动臂结构时,需要注意材料的选择、横截面形状、轴向载荷和弯曲载荷的影响,以及动臂与其他部件之间的连接方式等因素。
2. 有限元建模有限元分析是一种工程仿真方法,通过将连续体划分成离散的小单元来进行模拟,用以研究结构在受力情况下的变形和应力分布。
在进行动臂有限元分析时,需要首先对动臂进行三维建模,然后进行网格划分和材料属性定义,最后设置载荷和边界条件进行仿真分析。
3. 动臂应力分析通过ANSYS软件进行动臂的有限元分析,可以得到动臂在不同载荷下的应力分布情况,包括主梁、支撑臂、铰接部件等关键部位的应力值和变形情况。
通过分析动臂的应力分布,可以找出结构的薄弱环节和受力不均匀的部位,为后续的优化设计提供重要的参考。
二、动臂优化设计1. 材料选择优化首先需要对动臂使用的材料进行优化选择,考虑到其强度、刚度、密度和成本等因素。
在保证动臂强度和刚度的前提下,选择尽可能轻量化的材料,以降低整个装载机的自重,提高其工作效率和节能性能。
2. 结构形式优化通过有限元分析得到的应力分布情况,可以对动臂的结构形式进行优化设计。
例如在关键部位增加加强筋、进行优化的横截面设计、改进铰接部件的连接方式等,来提高动臂的整体性能和寿命。
3. 疲劳寿命预测动臂在工作过程中会受到多种复杂载荷的作用,需要进行疲劳寿命预测来确保其安全可靠。
学会使用AnsysWorkbench进行有限元分析和结构优化
学会使用AnsysWorkbench进行有限元分析和结构优化Chapter 1: Introduction to Ansys WorkbenchAnsys Workbench是一款广泛应用于工程领域的有限元分析和结构优化软件。
它的功能强大,能够帮助工程师在设计过程中进行力学性能预测、应力分析以及结构优化等工作。
本章节将介绍Ansys Workbench的基本概念和工作流程。
1.1 Ansys Workbench的概述Ansys Workbench是由Ansys公司开发的一套工程分析软件,主要用于有限元分析和结构优化。
它集成了各种各样的工具和模块,使得用户可以在一个平台上进行多种分析任务,如结构分析、热分析、电磁分析等。
1.2 Ansys Workbench的工作流程Ansys Workbench的工作流程通常包括几个基本步骤:(1)几何建模:通过Ansys的几何建模功能,用户可以创建出需要分析的结构的几何模型。
(2)加载和边界条件:在这一步骤中,用户需要为结构定义外部加载和边界条件,如施加的力、约束和材料特性等。
(3)网格生成:网格生成是有限元分析的一个关键步骤。
在这一步骤中,Ansys Workbench会将几何模型离散化为有限元网格,以便进行分析计算。
(4)材料属性和模型:用户需要为分析定义合适的材料属性,如弹性模量、泊松比等。
此外,用户还可以选择适合的分析模型,如静力学、动力学等。
(5)求解器设置:在这一步骤中,用户需要选择适当的求解器和设置求解参数,以便进行分析计算。
(6)结果后处理:在完成分析计算后,用户可以对计算结果进行后处理,如产生应力、位移和变形等结果图表。
Chapter 2: Finite Element Analysis with Ansys Workbench本章将介绍如何使用Ansys Workbench进行有限元分析。
我们将通过一个简单的示例,演示有限元分析的基本步骤和方法。
基于ANSYS WORKBENCH的六自由度工业机器人摆动臂静力学分析与模态分析

基于ANSYS WORKBENCH的六自由度工业机器人摆动臂静力学分析与模态分析陈继文【摘要】工业机器人的刚度和强度直接影响到机器人的精度和寿命,针对六自由度工业机器人摆动臂的静力学特性和结构动力学特性,提出使用Pro/E简化模型,利用ANSYS WORKBENCH有限元分析方法,得到静力学仿真结果和模态分析结果,分析结果对避免应力集中和共振具有一定的指导意义.【期刊名称】《制造业自动化》【年(卷),期】2018(040)010【总页数】5页(P56-59,81)【关键词】工业机器人;摆动臂;静力学分析;模态分析【作者】陈继文【作者单位】山西机电职业技术学院,长治 046011【正文语种】中文【中图分类】TP242.20 引言六自由度机器人运动灵活,在码垛、搬运、焊接、装配、喷涂等场合有着广泛的应用。
为了保证机械臂运行的可靠性,需要对其进行机械结构分析。
使用实验方法验证机器人结构设计的合理性,成本高,周期长[1],传统静力学计算方法精度低,过程繁琐。
本文使用Pro/E软件建立并简化六自由度机器人模型,利用ANSYS对摆动臂进行静力学分析,得到了摆动臂的应力和应变分布云图,有效的提高了精度,降低了周期,节约了成本。
模态分析可以用来研究结构动力学特性。
本文依据数值模态分析理论,使用有限元分析方法得到了六自由度机器人的六阶模态振动特性,得到了各个部件的固有频率和振型,为机器人结构优化设计和改进提供了理论依据,为设计同类产品提供了借鉴。
1 六自由度机器人摆动臂有限元模型建立1.1 建立几何模型六自由度机器人由底座、旋转座、摆动臂、摆动关节、旋转臂、腕关节组成。
整机构造复杂,需要根据等效刚度代换理论对模型做简化处理[2]。
把齿轮啮合简化为孔和轴的配合,忽略固定构件、线路、电位器、外部柔性导线管等对计算机分析影响不大的特征和部件,将质量等效分布,结构中相同材料的刚性作一体化处理[3],机器人模型如图1所示。
基于ANSYS Workbench的挖掘机动臂有限元分析
考依据。
关 键 词 :动 臂 ;S o lid w o r k s ;A N S Y S W o r k b e n c h ;静 力 学 分 析
中 图 分 类 号 :T Q 422. 2 文 献 标 识 码 : A
文 章 编 号 :1 0 0 7 6 9 2 1 ( 2 0 1 7 ) 0 6 0 0 8 5 01
备制造业中的应用。
• 85 •
黄 鹏 ,等 • 杨 家 坪 滑 坡 稳 定 性 研 究
2017年 第 6 期
表3
稳定性计算结果
工况组合 1 2 3 4
稳定性系数 1 2029 1 2154 1 0568 1 1838
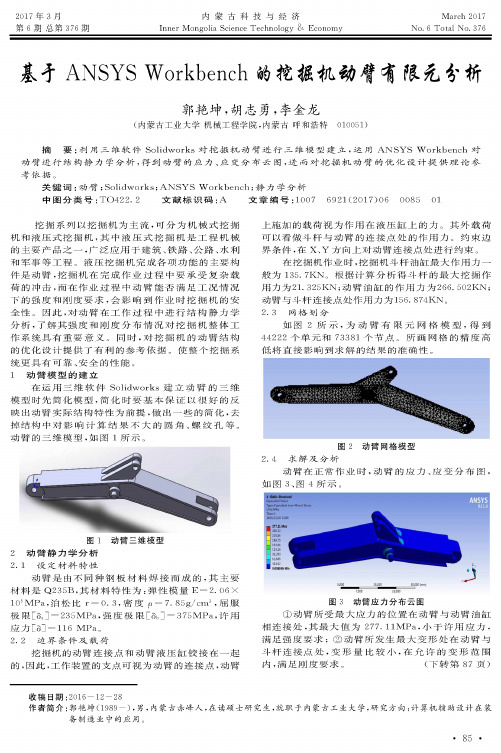
在 运 用 三 维 软 件 Solid w o rk s建 立 动 臂 的 三 维 模 型 时 先 简 化 模 型 ,简 化 时 要 基 本 保 证 以 很 好 的 反 映 出 动 臂 实 际 结 构 特 性 为 前 提 ,做 出 一 些 的 简 化 ,去 掉 结 构 中 对 影 响 计 算 结 果 不 大 的 圆 角 、螺 纹 孔 等 。 动 臂 的 三 维 模 型 ,如 图 1 所 示 。2
挖 掘 系 列 以 挖 掘 机 为 主 流 ,可 分 为 机 械 式 挖 掘 机 和 液 压 式 挖 掘 机 ,其 中 液 压 式 挖 掘 机 是 工 程 机 械 的 主 要 产 品 之 一 ,广 泛 应 用 于 建 筑 、铁 路 、公 路 、水 利 和 军 事 等 工 程 。液 压 挖 掘 机 完 成 各 项 功 能 的 主 要 构
如 图 2 所 示 ,为 动 臂 有 限 元 网 格 模 型 ,得 到 44222个 单 元 和 73381个 节 点 。所 画 网 格 的 精 度 高 低将直接影响到求解的结果的准确性。
基于ANSYS WORKBENCH的六自由度工业机器人摆动臂静力学分析与模态分析
收稿日期:2018-03-27基金项目:山西机电职业技术学院院级课题《基于ANSYS 的六自由度工业机器人研究》的阶段性成果(JKY-18006)作者简介:陈继文(1990 -),男,河南登封人,助教,硕士研究生,研究方向为机器人应用、超细水雾对瓦斯煤尘 爆炸的影响等。
基于ANSYS WORKBENCH 的六自由度工业机器人摆动臂静力学分析与模态分析Static analysis and modal analysis of robot swing arm of six degrees industrial robot based on ANSYS WORKBENCH陈继文CHEN Ji-wen(山西机电职业技术学院,长治 046011)摘 要:工业机器人的刚度和强度直接影响到机器人的精度和寿命,针对六自由度工业机器人摆动臂的静力学特性和结构动力学特性,提出使用Pro/E简化模型,利用ANSYS WORKBENCH有限元分析方法,得到静力学仿真结果和模态分析结果,分析结果对避免应力集中和共振具有一定的指导意义。
关键词:工业机器人;摆动臂;静力学分析;模态分析中图分类号:TP242.2 文献标识码:A 文章编号:1009-0134(2018)10-0056-040 引言六自由度机器人运动灵活,在码垛、搬运、焊接、装配、喷涂等场合有着广泛的应用。
为了保证机械臂运行的可靠性,需要对其进行机械结构分析。
使用实验方法验证机器人结构设计的合理性,成本高,周期长[1],传统静力学计算方法精度低,过程繁琐。
本文使用Pro/E 软件建立并简化六自由度机器人模型,利用ANSYS 对摆动臂进行静力学分析,得到了摆动臂的应力和应变分布云图,有效的提高了精度,降低了周期,节约了成本。
模态分析可以用来研究结构动力学特性。
本文依据数值模态分析理论,使用有限元分析方法得到了六自由度机器人的六阶模态振动特性,得到了各个部件的固有频率和振型,为机器人结构优化设计和改进提供了理论依据,为设计同类产品提供了借鉴。
基于ANSYS的滑移装载机动臂有限元分析与优化
基于ANSYS的滑移装载机动臂有限元分析与优化
滑移装载机动臂是一种用于装载和卸载物料的设备,广泛应用于建筑工地、港口、仓库等场所。
为了确保机动臂的稳定性和安全性,提高其工作效率和使用寿命,需要进行有限元分析与优化。
有限元分析是一种通过将结构离散成有限个单元,将其模型转化为离散状态,然后通过数学方法求解结构的应力、变形、振动等力学问题的方法。
使用ANSYS软件进行有限元分析与优化可以对机动臂的力学性能进行全面和准确的评估。
需要根据机动臂的实际结构进行建模。
可以将机动臂分为不同的部分,如臂体、伸缩管、液压缸等,并根据实际尺寸和材料参数进行建模。
然后,需要对机动臂受到的各种力进行加载,如自重、载荷、液压力等。
根据机动臂的实际工作条件和使用环境,选择适当的加载方式和加载位置。
然后,通过设置合适的边界条件,如固定支撑点、转动支撑点等,确定机动臂在有限元分析中的自由度。
通过求解有限元方程组,可以得到机动臂在不同加载情况下的应力和变形分布情况。
有限元分析结果的准确性和可靠性对于优化设计至关重要。
根据分析结果,可以识别出机动臂的设计弱点,并针对性地采取改进措施,如增加材料厚度、优化结构形状或增加支撑点等。
通过多次有限元分析和优化,最终得到稳定性更好、安全性更高、效率更高的机动臂设计方案。
在进行有限元分析与优化时,还需要考虑到机动臂的材料特性和工作条件。
如机动臂所使用的材料的强度、刚度、疲劳寿命等,以及机动臂在实际工作中受到的加载频次、加载方式、工作温度等。
这些因素将直接影响到分析与优化结果的准确性和可靠性。
基于Ansys+Workbench的起重机吊臂结构全伸臂工况的有限元分析
全伸臂工况的有限元分析
李春风,董庆华,李少杰,郝清龙 ,王宇飞,曹
(承德石油高等专科学校工业技术中心,河北
硕
承德067000)
摘要:通过吊臂吊载,起重机能够实现大高度、大幅度的作业,吊臂是起重机的最主要承载构件之一,吊臂的 分析研究对于起重机的结构优化起到了大的作用。以50 t起重机吊臂为例,借助软件Ansy。w。,kbench对吊 臂结构的全伸臂工况进行有限元分析,得到其变幅平面内各处位移和应力,为结构的改进和优化提供了一定
的参考。
关键词:吊臂;Ansys Workbench;有限元
中图分类号:TH21 文献标识码:A 文章编号:1008.9446(2016)02-0017-05
Finite Element Analysis of Crane Boom Device in Full Arm Condition Based
吊臂工作原理、结构尺寸及其受力分析
1.1吊臂工作原理 起重机升降重物,是利用吊臂顶端的滑轮组支撑卷扬钢丝绳来悬挂重物,利用吊臂的长度和倾角的 变化来改变工作半径和起升的高度,如图1所示。吊臂有两节、三节、四节、五节等不同形式,通过变幅
机构来实现俯仰功能,如图2所示。起重臂顶端可以加滑轮,实现吊钩单倍率工作,提高工作速度。另
位移。 2.3后处理
Ansys
Workbench的后处理中Geometry按钮控制云图的显示方法,共有四个可用选项:Exterior是默
认的显示方式并且是常用的方式,IsoSuffaces对于显示相同的值域是非常有用的,Capped IsoSurfaces是 指删除了模型的一部分后的显示结果,删除的部分是可变的,高于或者低于某个指定值的部分被删除,
基于ANSYS的滑移装载机动臂有限元分析与优化
基于ANSYS的滑移装载机动臂有限元分析与优化滑移装载机动臂是一种工程机械设备,用于在建筑工地、矿山等场合进行土方作业。
在使用过程中,动臂承受着巨大的荷载和工作负荷,因此需要进行有限元分析与优化来确保其结构的强度和稳定性。
ANSYS是一款常用的工程有限元分析软件,可以对装载机动臂进行结构分析,找出潜在的设计问题并进行优化。
下面将介绍基于ANSYS的滑移装载机动臂有限元分析与优化的步骤和方法。
第一步是建立动臂的有限元模型。
通过CAD软件绘制出动臂的三维模型,并将其导入到ANSYS中。
然后,根据实际情况对动臂进行离散化处理,将其分割成有限元单元,包括梁单元和壳单元。
梁单元用于表示动臂的主要结构部分,壳单元用于表示较薄的板材或薄壳结构,如活塞。
第二步是对动臂进行边界条件的定义。
这包括约束条件和加载条件。
约束条件用于限制动臂部分的位移和旋转,以模拟实际工作状态。
加载条件用于模拟动臂承受的荷载,包括静态荷载和动态荷载。
静态荷载可以通过沉降荷载、施加力矩等方式加在动臂上,动态荷载可以通过模拟工作过程中的振动荷载来加在动臂上。
第三步是进行有限元分析。
在ANSYS中,可以选择不同的求解器和求解方法对动臂进行分析。
常见的求解器包括静力分析、模态分析、疲劳分析等。
根据实际需要,选择合适的求解器来对动臂进行分析,并获取其应力、应变、振动等结果。
根据分析结果,可以找出动臂的潜在问题,如应力过大、振动过大等。
第四步是对动臂进行优化。
根据分析结果,可以对动臂的结构进行优化,以提高其强度和稳定性。
优化的方法包括结构参数优化、材料参数优化等。
结构参数优化可以通过调整梁单元的尺寸、形状等来改善动臂结构;材料参数优化可以通过选择合适的材料来提高动臂的强度和刚度。
通过不断进行优化,可以找到一个最佳的设计方案,以满足动臂工作的要求。
对优化后的设计方案进行验证。
将优化后的设计方案重新导入到ANSYS中,进行有限元分析,以验证其在实际工作条件下的性能。
基于ANSYS_WORKBENCH的机床动态性能分析及改进
基于ANSYS_WORKBENCH的机床动态性能分析及改进机床的动态性能对于机床的稳定性、精度和效率具有重要影响。
通过对机床进行动态性能分析和改进,可以提高机床的加工效率和精度,降低故障率,提升生产效率。
本文将基于ANSYS_WORKBENCH对机床进行动态性能分析,并提出改进方案。
首先,通过ANSYS_WORKBENCH对机床进行动态性能分析。
ANSYS_WORKBENCH是一款用于工程仿真的软件,具有强大的建模和分析能力,可以对机床进行应力、振动和变形等方面的分析。
通过建立机床的有限元模型,可以模拟机床在加工过程中的振动情况,分析机床的固有频率、模态振型等动态性能指标,评估机床在运行过程中的稳定性。
在动态性能分析的基础上,针对机床存在的问题进行改进。
根据动态性能分析的结果,可以确定机床存在的振动源、刚度不足、动态刚性不够等问题,进而提出相应的改进方案。
对于振动源较为明显的问题,可以通过加装减振装置、增加机床刚度等方式进行改进;对于刚度不足的问题,可以通过调整机床结构、更换材料等方式增加机床的刚度;对于动态刚性不够的问题,可以通过控制系统的调整和优化来改进。
在改进方案实施后,再次通过ANSYS_WORKBENCH对机床进行动态性能分析,验证改进效果。
通过对改进后的机床进行振动、应力、变形等方面的分析,评估改进方案的有效性。
如果改进方案有效,可以进一步提出优化建议,加强机床的设计和制造过程控制。
最后,通过对机床的动态性能分析及改进,可以提高机床的加工效率和精度。
精确掌握机床的动态性能指标,可以及时发现和解决机床存在的问题,降低故障率,提升机床的稳定性和可靠性。
通过对机床的改进,可以进一步提高机床的刚性和动态刚性,降低机床的振动和变形,提高加工精度和表面质量。
综上所述,基于ANSYS_WORKBENCH的机床动态性能分析及改进可以有效提高机床的加工效率和精度,降低机床故障率,提升生产效率。
对于机床制造企业来说,重视机床的动态性能分析和改进工作,不仅可以提高产品竞争力,还可以满足市场对精密加工的需求,推动企业的可持续发展。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 六 自由度机械臂有 限元分析
1 . 1 有限元模型的建立
臂构 件 较 多且 等 效 简化 后造 型 简单 , 因此 可 以选 用Me c h a n i c a l , 网格 大 小 为 2 0 , 自动 网格 划 分 ,如 图1 所 示 ,节 点数 量 为4 7 4 4 2 ,单 元数 为2 2 8 1 2 。后
下 点 :
行 的可 靠 性 ,需 要 对 其 进 行 机 械 结 构 分 析 。近 年
来 对 机 械 结 构 的 分 析 已 经 从 结 构 静 力 学 延 伸 到 了
动 力 特 性 领 域 ,特 别 是 对 振 动 分 析 的 模 态 仿 真 已
1 )简 化 各种 连 接 ,将 齿轮 啮 合 简化 为 轴 和孔
姜振 廷 ,郑忠 才 ,董 旭
J l ANG Zh e n . t i n g,ZHENG Z h o n g . c a i , DO NG Xu
( 山东建筑大学 ,济南 2 5 0 1 0 1 )
摘 要 : 六 自由度机械臂作为机器人的 主要执 行机构 ,其机械性能决定 了工作的可靠性 。论文针对机械 臂的整体结 构进行 静力学特性和 振动特 性研究 ,基于A N S Y S WO R K B E N C H 的有 限元分析功 能 ,得到 了静 力学仿真和 模态仿 真的结果 ,并对 结果进行 了分析 ,在此基础 上对机械 臂进行 了减重优化 ,通过模态分析 ,验证 了优 化结果的可靠性。 关键 词 :机械臂 ;有限元 ;A N S Y S WO R K B E N C H
限 元分 析 。
软 件 中完 成 材 料 属性 的加 载 ,接 触 面 的 约 束 , 网
格 的 划 分 。 其 中 机 械 臂 连 接 部 分 及 夹 持 手 材 料 为 不 锈钢 , 弹性 模 量 l 9 3 G P a ,泊 松 比0 . 3 1 , 密度 7 7 5 0 k g / m。 ,其 他 部 分 等效 为硬 铝 合 金 ,弹 性模 量 7 1 GP a ,泊松 比0 . 3 3 ,密度 2 7 7 0 k g / m 。接 触面 选用 Bo n d e d 和N o S e p a r a t i o n 两种 面约 束 定义 , 由于 机械
被 广 泛 采 用 。 同时 有 限 元 分 析 作 为 近 代 工 程 领 域 应 用 最 广 泛 的 数 值 分 析 的方 法 ,其 可 靠 性 已被 广
泛验 证 。
静 力 学 分 析 是 机 械 结 构 设 计 的基 础 ,本 文 对
六 自 由度 机 械 臂静 力 学 研 究 的 是 在 自身 重 力 的 情 况 下 , 机 械 臂 保 持 静 平 衡 时 各 个 关 节 的 受 力 情
中图分类号 :T P 2 4 1 文献标识码 :A
文章编号 :1 0 0 9 —0 1 3 4 ( 2 0 1 4 ) 0 1 ( 上) 一0 1 0 9 ~ 0 3
D o i :1 0 . 3 9 6 9 / J . i s s n . 1 0 0 9 — 0 1 3 4 . 2 0 1 4 . 0 1 ( 上) . 3 1
有 限 元 仿 真 过 程 主 要 分 为 前 处 理 和 后 处 理 两 个 阶 段 , 其 中 前 处 理 阶 段 主 要 完 成 的 流 程 包括 :模型从 P r o / E n g i n e e r 软 件 导 入 到 ANS YS wORK BE NC H 软 件 ,在 ANS YS WO RKB E NC H
的配 合 ,将 螺栓连 接 简化 为面 接触 。 2 )忽 略 螺纹 和 倒 角特 征 , 忽略 电位 器 及 相应 的 固 定 构件 和 线 路 ,忽 略 次 要 的 空 、 台特 征 ,将 质量进 行 等效 分布 。 3 )依 据液 压 系统 的位 置特 点 ,采 用 等 效配 重
论 ,采 用 有 限 元 法 对 带 电作 业 机 械 臂 振 动 特 性 进 行 分 析 ,得 到 了 机 械 臂 前 四 阶 模 态 下 的 振 动 特
性 。通 过 分 析 对 机 械 臂 进 行 部 分 优 化 ,进 一 步 满 足 带 电 作 业 特 殊 工 况 的 需 求 。 由于 机 械 臂 结 构 复 杂 ,本 文 选 用P r o / E n g i n e e r 软 件 进 行实 体 建 模 ,依 靠ANS YS WOR KBE N CH软 件 完 成机 械 结构 的有
况 ,为 机 械 臂 强度 的 改 进提 供 指 导 。模 态分 析 作 为 近 代 研 究 结构 动 力 特性 的一 种 方 法 ,被 广泛 应 用 于 工 程 振 动 领 域 。文 章 运 用 数 值 模 态 分 析 理
原 理将 液 压缸 、马 达及 管路 进行 等效 简化 。
1 . 2 有限元仿真
0 引言
作 为机 器 人 直 接 执 行 机 构 ,六 自由 度机 械 臂 具 有 结 构 简便 、运 动 灵 活 等优 势 , 因 此 在工 业机 器 人 领 域 的到 了广 泛 的 应用 。为 了保 证 机 械 臂 运
由于 机 械 臂 采 用 液 压 驱 动 ,且 结 构 紧 凑 ,构 造 比较 复 杂 。在 模 型 建 立 过 程 中可 以依 据 等 效 刚 度 代 换 理 论 ,将 具 体 结 构 进 行 有 效 的 处 理 和 简 化 。对 带 电 作 业 机 械 臂 机 进 行 等 效 简化 主 要 有 以
1
匐 似
基于A NS Y S WO R K B E NC H的六 自由度机械臂 有限元分析及 结构优化
A nal ysi s and i m pr o v em ent of 6 - DO F m ani pul at or b ased on A NSYS W o RK BENCH