拦阻索冲击的多体动力学仿真研究
舰载机拦阻着舰动力学研究
~ ~
一
、 。 、
分 别 为
前 轮 、左主轮 和右 主轮的侧偏 角 ( 假设 与 均为
.
小 角度 ) ;Ⅳn 为前轮 支反力 ;Ⅳ 为左 主轮支反力 ; Ⅳm 为右 主轮 支反力 ; 、 m f。 、 为前 轮 、左 主轮
一
F
r G
‘
I
和右 主轮在舰 载机 着舰滑跑 阶段所受 的摩擦力 沿垂 直 于机轮轴线 方 向_ 的分量 ;舰 载机 与舰 面之 间动摩 擦 系 数 为 , 则 近 似 有 厂 = n n Ⅳ , =l m , l l N
中 图分 类 号 :V 1. 213 5 文 献 标 志 码 :A
0 引 言
与 陆基飞机着 陆相 比而言 , 载机着舰 的难度 、 舰 复杂性 和危 险性要 大得多 ,为使 高速 飞行 的舰载 机 能在长度相对 陆机 飞机着 陆跑道要短 得多 的舰 船 飞 行 甲板上顺利 着舰 ,各 国海 军均采用 了舰载机 着舰
收稿 日期 :2 0 .9 1 ; 修 回 日期 :2 0 .2 1 0 90 .7 0 9 1.7
作者简 介:陶 杨 ( 95 ,男 ,硕士生 。侯志强 (99 ,男 ,教授 , 18一) 15一) 博导 ,博士。
14 3
海 军 航 空 工 程 学 院 学 报
第 2 卷 5
机 轮所受力 情况如 图 3所示 。 为前轮与机 体 坐 标轴 系 的 X轴 之 间 的夹 角 ;
拦 阻 索 的 中 间且 拦 阻 钩运 行 速度 方 向垂 直 于拦 阻
拦 阻装置 。 良好的着 舰拦阻是 对人员 、舰船 和舰载 机安 全 的重 要保证 川。在舰 载机整个 着舰 过程 中 ,
缆索的动力学建模及其应用研究_参考文献笔记
索状结构的动力学建模与算法研究——参考文献阅读笔记1 水下拖曳系统水动力特性的计算流体力学分析(2007)在数值模拟中是否能够准确地描述拖曳缆绳和拖曳体的水动力状态,是能否准确地模拟拖曳系统地水动力性能的关键。
在模拟水下拖曳系统的水动力性能中,通常忽略拖曳船与拖曳系统的耦合作用,系统的水动力模型一般认为由两部分组成:拖曳缆绳与拖曳体。
在描述拖曳缆绳的水动力状态时,最常用的方法是集中质量法和有限差分法。
而目前对水下拖曳体水动力特性模拟,应用最广泛的当属由Gertler and Hargen[1]首先提出后由Abkowitz[2]改进的水下运载体(Underwater Vehicle)六自由度运动方程。
在Gertler and Hargen 方程中,其左边项代表了拖曳体的惯性力;而右边项代表了作用在拖曳体上的外力,这些外力包括拖曳体的摇荡恢复力、拖曳缆绳张力以及水动力。
运用这些方程成功与否,关键是能否准确地确定作用于拖曳体上的水动力。
确定拖曳体上水动力的手段可以分为实验方法与估算方法两大类。
试验方法缺点是试验费用昂贵、试验周期长。
估算方法,是指根据过去的统计与试验参数回归出适当的拖曳体水动力计算经验公式,或以数值计算结合经验公式来确定其水动力数值。
在这一方法中,人们通常根据拖曳体的几何参数以计算方法取得拖曳体在理想流体中的惯性力参数,以经验公式计算拖曳体的粘性力,最后将两者结合起来。
这一方法实际上是将作用在拖曳体的水动力分为惯性力和阻尼力,并人为地认为它们是互不关联的两种成分,而其中的粘性力则被认为由拖曳体各组成部分粘性力的叠加,而忽略了其各组成部分之间的相互影响。
显然这一处理方法与实际情况有相当的差距。
一般认为估算方法只有在拖曳体的各组成部分为回转体或相对流线型时才能得到比较合理的结果[3]。
本算法的基本思想,是以拖曳缆绳及拖曳体运动方程通过边界耦合建立系统水动力数学模型,以此为基础用差分方程来求解拖曳系统的水动力特性。
单列向心球轴承保持架动力学仿真分析
单列向心球轴承保持架动力学仿真分析吴志飞;曹国侯;许平;罗永生;张宝勇【摘要】This paper took the single-row radial ball bearing cage as a research object,based on the theoretical foundation of the multi-rigid-body system dynamics and platform of virtual prototype,and by using the 3D software SolidWorks,constructed a model.There were one multi-rigid-body system model and another coupled multi-body system model established in ADAMS software.This paper discussed the multi-body system coupled modeling general method,the cage on the system dynamic characteristic influence.The results of the study showed that soft cage damping effect absorbed energy and inhibit the cage vibration,which made its stress smaller more stable operation.%以单列向心球轴承的保持架为研究对象,以多体系统动力学为理论基础,以虚拟样机技术为平台,利用三维建模软件SolidWorks建立实体模型,通过有限元软件ANSYS离散化所建的模型.在ADAMS 软件中,为单列向心球轴承分别建立1个多刚体系统模型和1个刚柔耦合多体系统模型,探讨了多体系统刚柔耦合建模的一般方法,研究了保持架对系统动态特性的影响.研究结果显示,柔性保持架的阻尼作用吸收了部分能量,并抑制了保持架的振动,使其受力更小,运转更稳定.【期刊名称】《新技术新工艺》【年(卷),期】2013(000)007【总页数】3页(P73-75)【关键词】单列向心球轴承;保持架;ADAMS;刚柔耦合【作者】吴志飞;曹国侯;许平;罗永生;张宝勇【作者单位】昆明理工大学机电工程学院,云南昆明650504;成都军区工程科研设计所,云南昆明650222;昆明理工大学机电工程学院,云南昆明650504;金川集团有限公司,甘肃金昌737104;金川集团有限公司,甘肃金昌737104【正文语种】中文【中图分类】TH133.33滚动轴承分有和无保持架2种结构。
时域分析法在冲击仿真中的应用

为减震器的位移约束,设备的速度会逐渐减弱,当 t =
0.035 s 时,速度归为 0,此时的减震器的位移变形量会
达到峰值。 先将加速度分段函数进行一次积分,在积
分过程中应注意在 0.01 s 时刻速度达到最大值,对应
的数值即为正波的面积 1.656 m / s,处理得到速度的分
所示。
图 3 系统时域力曲线
2.2 强制位移输入法
根据双半正弦波的特点对加速度分段函数进行二
重积分,将加速度等效成位移载荷的方式加载在设备
底部。 积分过程中注意在正波脉宽的结束时刻为速度
的峰值,在负波脉宽结束时刻为位移的峰值。 由图 2
可知,在冲击的过程中,设备由初始零速度,加速度开
始工作,至 0.005 s 时正波加速度达到峰值 260 m / s2 。
质量和刚度远大于自身的大质量块,在砝码设备和质
量块之间建立如图 6 所示的 4 个 3 向弹簧阻尼单元,
模拟砝码设备下端的减震系统。
(7)
由式(7) 可得速度时间函数的常数项为 0.83,将
积分得到的速度时间分段函数进行拟合,得到图 4 的
时域速度曲线。
— 42 —
图 6 砝码减震系统
宋骏琛 等 时域分析法在冲击仿真中的应用
首先是正波冲击,按照波形不同可以将组合后的输入曲
线拟合成图 1 所示的正负两个面积相等的半正弦波
从而完成冲击输入谱从频域到时域范围的转化。
a 2 = 0.6a 0 , V1 = V2 =
t1 =
πV1
2a 2
, t 2 =
2d 0
V1
[6]
,
2
拦阻索应力的仿真研究
由于整 个 拦 阻动 力 学 过程 是 大 位移 、 大 转 动 问 题, 若 利用 离散 质点 和 离 散 刚体 的 方法 、 或应用 L S . D Y N A进行 绳索 的显 式 动 力 学仿 真 , 需要 网 格划 分 较密 , 计算 时 间步 长小 , 导 致计 算效 率低 。 因此有 必 要借 助隐 式动力 学格 式增 大 时间步 长来提 高计 算效
@
2 0 1 5 S c i . T e c h . E n g r g .
航 空航 天
拦阻 索应 力的仿真研究
沈文厚 丁 祥 郭叔伟
( 海军航空兵学院 , 葫芦岛 1 2 5 0 0 1 )
摘
要
舰载机着舰过程 中, 拦 阻索的应力直接关系到舰载机 的飞行安全 。为研 究拦 阻索应力波传播规 律 , 在 多体 动力 学框
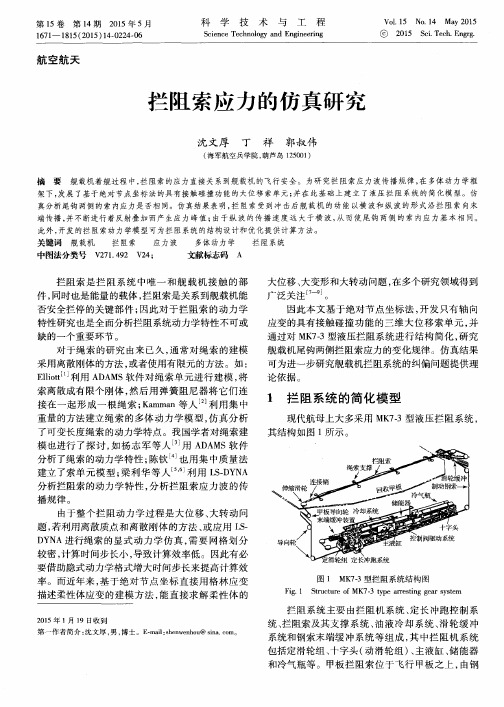
n l , 由3 0根 高强 度 的直径 为 1 . 2 m m 的钢 丝绳 拧 成 , 钢 丝绳 之 间用 聚 酯 纤 维进 行 润 滑 0 1 。 当拦 阻 索 受 到舰 载 机尾 钩 冲击 后 , 其 大 翘 曲变形 对 拦 阻索 应 力 的影 响可 以忽 略 , 因此 , 为 了 减小 计 算 成 本 , 开 发 的 索 单元 进行 了必 要 的简化 。 2 . 1 基 本假 设
通过对 MK 7 — 3型液 压拦 阻 系统 进行 结 构 简 化 , 研 究 舰载 机尾 钩两侧 拦 阻索应 力 的变化 规律 。仿 真结果 可为 进一 步研究 舰 载机拦 阻 系统 的纠偏 问题 提供理
论 依据 。
对 于绳 索 的研 究 由来 已久 , 通 常 对绳 索 的建模 采用 离散 刚体 的方 法 , 或 者使 用有 限元 的方法 。如 : E l l i o t t … 利用 A D A MS软件 对 绳 索单 元 进行 建 模 , 将 索离 散成 有 限个 刚 体 , 然 后 用 弹簧 阻尼 器 将 它们 连 接 在一 起 形 成 一 根 绳 索 ; K a m m a n等人 利 用 集 中 重量 的方 法建 立绳 索 的多体 动 力 学 模 型 , 仿 真 分析 了可变长 度绳 索 的动力学 特 点 。我 国学 者对 绳索建 模 也进行 了探 讨 , 如 杨 志 军 等人 l 3 用 A D A M S软 件 分析 了绳 索 的动力 学 特性 ; 陈钦 也 用 集 中质量 法 建立 了索 单 元 模 型 ; 梁 利 华 等 人 利 用 L S . D Y N A 分析 拦 阻索 的动力 学 特 性 , 分 析 拦 阻索 应 力 波 的 传
舰载机着陆滑跑动力学模型与仿真
第1章绪论1.1课题研究的背景及意义舰载机是以航空母舰或其他军舰为基地的海军飞机。
能否更安全着陆是舰载机研究的一个重要环节。
舰载机着陆过程中会承受较大的冲击负荷,特别是机轮在着陆滑跑过程中通过诸如拦阻索、甲板信号灯等障碍时,会引起较大的起落架载荷增幅。
过大的载荷会导致起落架缓冲性能失效从而引发严重事故。
因此,准确建立舰载机着陆滑跑过程中的动力学模型,分析起落架缓冲系统对此冲击载荷的影响,对舰载机起落架的研制与试验有着非常重要的意义。
起落架系统作为飞机最重要的承力功能构建,用以飞机起飞、着陆、地面滑跑和停放,并吸收着陆撞击和滑跑冲击的能量。
它的设计师飞机设计中一个非常重要的部分。
它包括的内容多、涉及面广,是一个极其复杂的过程。
因而起落架设计是要经过多次反复设计完成的。
这就导致起落架设计的周期长,设计效率低。
另外在进行起落架分析和设计的时候,通常要建立一定的试验装置。
例如在进行起落架落震实验时,实验装置复杂且能测得的数据少。
我国的落震技术远远落后与西方发达国家,只能测量机轮垂直力、水平力、重心位移、缓冲器位移、轮胎压缩量等几个参数。
机轮的侧向力、机轮的三方向位移和三方向加速度、起落架加速度、起落架主支柱上关键部位的应力都不方便测出。
舰载机对起落架的性能要求比普通飞机更高。
如何研制这种高性能的起落架是发展舰载机的一个重要课题。
建立舰载机着陆滑跑动力学模型,可以直观了解舰载机起落架在着陆滑跑阶段受力变化,再利用仿真技术可以方便地实现起落架系统的运动分析、载荷及应力分析、动力学分析,能够较好地代替实物实验装置。
它有投资少、试验简单方便、测得的数据多、精度高等优点,可以大大提高起落架的设计质量,缩短设计周期。
仿真软件的使用将为我国节省大笔的科研资金投入,另外使用和维护费用低廉。
在飞机设计的极为重要的起落架设计当中,仿真软件的设计可以使设计更为优化。
在设计过程中,根据选择的参数在软件上仿真,根据仿真结果,适当的修改设计参数,从而优化设计提高设计精度和效率,对舰载机及其它领域的发展有着重要意义。
多工况下列车纵向冲击仿真研究

多工况下列车纵向冲击仿真研究
樊坤
【期刊名称】《科技创新与应用》
【年(卷),期】2024(14)2
【摘要】为了研究多编组列车在惰行、牵引、制动工况下的纵向冲击,该文通过多体动力学软件Simpack中的rail模块建立由2辆机车和8辆货车编组的多自由度列车动力学模型并结合列车实际运行遇到的轨道不平顺问题和不同工况的受力来设置仿真的边界条件,通过仿真结果分析多编组列车在不同工况下受到的纵向冲击。
仿真的结果表明,列车在惰行工况下所受纵向冲击较小且纵向冲击力大小与速度大小的关系并不是线性的;紧急制动时的列车间纵向冲击力略大于常制动下的列车间纵向冲击力;在列车牵引与制动时,最大纵向冲击力出现在机车与货车相连的缓冲装置。
【总页数】4页(P63-66)
【作者】樊坤
【作者单位】西南交通大学机械工程学院
【正文语种】中文
【中图分类】U270.11
【相关文献】
1.电动汽车驱动工况下纵向冲击问题研究
2.重载列车同步控制下纵向力仿真研究
3.ECP信号传播方式对3万t重载列车制动工况纵向冲动影响仿真研究
4.制动工况下旅客列车纵向动力学分析
5.重载组合列车制动工况下列车纵向力影响因素分析
因版权原因,仅展示原文概要,查看原文内容请购买。
四自由度工业机器人运动学分析与仿真
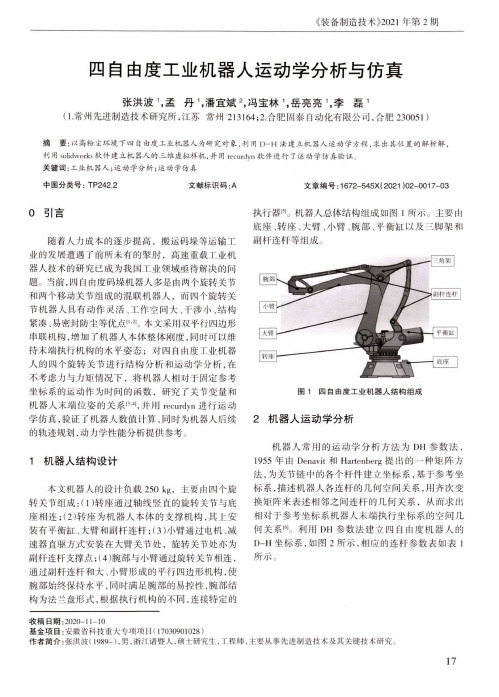
《装备制造技术》2021年第2期四自由度工业机器人运动学分析与仿真张洪波1,孟丹1,潘宜斌2,冯宝林1,岳亮亮1,李磊1 (1•常州先进制造技术研究所,江苏常州213164:2.合肥固泰自动化有限公司,合肥230051 )摘要:以高粉尘环境下四自由度工业机器人为研究对象,利用D-H法建立机器人运动学方程,求出其位置的解析解,利用solidworks软件建立机器人的三维虚拟样机,并用recurdyn软件进行了运动学仿真验证关键词:工业机器人;运动学分析;运动学仿真中图分类号:TP242.2 文献标识码:A 文章编号:1672-545X(2021 >02-0017-030引言随着人力成本的逐步提高,搬运码垛等运输工 业的发展遭遇了前所未有的掣肘,高速重载工业机 器人技术的研究已成为我国工业领域亟待解决的问 题。
当前,四自由度码垛机器人多是由两个旋转关节 和两个移动关节组成的混联机器人,而四个旋转关 节机器人具有动作灵活、工作空间大、干涉小、结构 紧凑、易密封防尘等优点l h21。
本文采用双平行四边形 串联机构,增加了机器人本体整体刚度,同时可以维 持末端执行机构的水平姿态;对四自由度工业机器 人的四个旋转关节进行结构分析和运动学分析,在 不考虑力与力矩情况下,将机器人相对于固定参考 坐标系的运动作为时间的函数,研究了关节变量和 机器人末端位姿的关系i3'并用recurdyn进行运动 学仿真,验证了机器人数值计算,同时为机器人后续 的轨迹规划,动力学性能分析提供参考。
1机器人结构设计本文机器人的设计负载250 kg,主要由四个旋 转关节组成:(1)转座通过轴线竖直的旋转关节与底 座相连;(2)转座为机器人本体的支撑机构,其上安 装有平衡缸、大臂和副杆连杆;(3)小臂通过电机、减 速器直驱方式安装在大臂关节处,旋转关节处亦为 副杆连杆支撑点;(4)腕部与小臂通过旋转关节相连, 通过副杆连杆和大、小臂形成的平行四边形机构,使 腕部始终保持水平,同时满足腕部的易控性,腕部结 构为法兰盘形式,根据执行机构的不同,连接特定的执行器|51。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Mu l t i - b o dy d y na mi c s i mu l a t i o n 0 f i mp a c t o n c r o s s d e c k pe nd a nt S HEN We n — h o u ’ ,ZHAO Zh i — h u a ,REN G e — x u e , WANG Ni n g — y u
2 .N a v a l A v i a t i o n I n s t i t u t e ,H u l u d a o 1 2 5 0 0 1 ,C h i n a )
A bs t r a c t: Wh e n a n a i r c r a f t i s l a n d i n g o n a n a i r c r ft a — c a r r i e r ,t he i mp a c t s t r e s s g e n e r a t e d a t t h e mo me n t o f i t s t a i l —
t r a n s v e r s e wa v e s a t d e c k s h e a v e s a n d c a r r i e r — b a s e d a i r c r a f t t il a — h o o k,a ft e r t h e t a i l - h o o k a r r e s t s t h e c r o s s d e c k p e n d a n t ;
h o o k a r r e s t i n g c r o s s d e c k p e n d a n t p r o p a g a t e s t o b o t h e n d s o f t h e w i r e r o p e .T o s i mu l a t e a n d u n d e mt a n d t h e g o v e r n i n g l a w o f t h i s s t r e s s w a v e ,a c a b l e e l e me n t w i t h c o n t a c t a n d l a r g e d i s p l a c e me n t f u n c t i o n s wa s d e v e l o p e d b a s e d o n a b s o l u t e n o d a l
振
动
与
冲
击
Vo 1 . 3 4 No . 5 2 0 1 5
第3 4 卷第 5 期
J OURNAL OF VI BR AT I ON AND S HOCK
拦 阻 索 冲 击 的 多 体 动 力学 仿 真 研 究
沈文厚 ,赵治华 ,任革学 ,王 宁羽
( 1 . 清华大学 航天航空学 院 , 北京 1 0 0 0 8 4; 2 .海军航空兵学 院 , 辽宁 葫芦 岛 1 2 5 0 0 1 )
峰值 。拦 阻系统 中的钢索用 轻质材料代替 , 亦能降低索 内应 力峰值 。此外 , 建 立的全 尺寸舰载机拦 阻系统 多体动力 学模
型为系统的设计与优化 提供 了一种计算手段 。
关键词 :拦阻索 ; 多体动力学 ; 冲击 ; 应 力波
中 图 分 类 号 :0 3 文 献 标 志码 :A D O I : 1 0 . 1 3 4 6 5 / j . c n k i . j V S . 2 0 1 5 . 0 5 . 0 1 3
( 1 .S c h o o l A s t r o n a u t i c s , T s i n g h u a U n i v e r s i t y ,B e r i n g 1 0 0 0 8 4 ,C h i n a ;
c o o r d i n a t e f o r mu l a t i o n u n d e r t h e ra f me wo r k o f mu l t i — b o d y d y n a mi c s . An d t h e n a mu l t i — bo d y d y na mi c mo d e l o f t h e wh o l e a r r e s t i n g s y s t e m wa s b ui l t .T he r e s u l t s o f s i mu l a t i o n s h o we d t h a t s t r e s s pe a k s a r e c a u s e d b y r e le f c t i o n a n d s u p e r p o s i t i o n o f
摘 要 :舰载机着舰时, 尾钩冲击拦阻索导致索内应力动态向甲板两端传播。为研究拦阻索应力波传播规律及峰
值决定 因素 , 本文在 多体 动力学框架下 , 发展 了基 于绝对节 点坐标法的具有接触碰撞 功能的大位移索单元 , 在此基础 上建
立 了包含 缓冲装置 的拦阻 系统多 体动力学模型 , 仿真揭示 了拦 阻索受 冲击 后应力 波在传播 过程 中, 分别 在 甲板两侧 的导 向轮 和尾 钩处 , 因横 波的反射与叠加均造成 了应 力尖峰 , 而 滑轮缓 冲装 置与钢 索末端缓 冲装置 均能有效 的降低索 内应 力