SD卡读写的方式(用SD模式)
SD卡模式分析

∙浅谈SD/MMC卡的SD模式和SPI模式
∙HANNY 发表于2009-10-24 15:15 | 分类:嵌入芯得| 浏览:7164
SD/MMC卡的读写模式分两种。
一种是利用SD总线来进行数据传输,这里称为SD模式;
另外一种是利用SPI总线来进行数据传输,这里称之为SPI模式。
最初接触SD/MMC卡时,Hanny一直觉得很奇怪,为什么SD/MMC卡要提供两种模式进行访问呢?比较完这两种模式的区别,分析其运用场合,就会明白答案了。
SD卡主要工作于4BIT SD模式下(MMC可能工作在8BIT SD模式下)。
其读写最高时钟可达50MHz,因此,市面上的卡的读取速度能到达20MB/s以上,已经算极限了。
SD模式也是SD卡的主要工作模式。
而SPI模式只有1BIT的带宽,而且时钟最高只能到25MHz,因此读取速度通常低于3MB/s。
但是SPI模式对硬件要求较低,一般广泛用于MP3等对读卡速度要求不高的低端场合。
Hanny当时还有一个疑问:SD模式不是也同样支持1BIT模式吗?为什么不直接用SD的1BIT 模式呢?
后来才明白:1、SPI总线是一个通用总线,大部份芯片都用硬件模块;2、SPI模式支持不带CRC校验的传输方式,可以降低硬件要求;3、SD的CMD线与DATA线之间有可能同时产生数据,对没有SD硬件模块的主机支持起来难度较高
CDMO对应MCU_MOSI第28个腿PB15,CDMI对应MCU_MISO第27个腿PB14。
SD卡读写包括两种模式

SD卡读写包括两种模式:SD模式和SPI模式。
其中SD模式又可以分为1bit 和4bit两种传输模式。
SD卡缺省使用专有的SD模式。
SD卡规范中主要讲了一些命令,响应和CRC效验等等,整个规范的内容还是很多的。
SD卡上电后,卡处于空闲状态,主机发送CMD0复位SD卡,然后通过CMD55和ACMD41判断当前电压是否在卡的工作范围内。
在得到了正确的响应后,主机可以继续通过CMD10读取SD卡的CID寄存器,通过CMD16设置数据块长度,通过CMD9读取卡的CSD寄存器。
从CSD寄存器中,主机可以获知卡容量,支持的命令集等重要参数。
此时,卡以进入了传输状态,主机就可以通过CMD17/18和CMD24/25对卡进行读写。
CRC校验是为了防止SD卡的命令,应答,数据传输出现错误。
每个命令和应答信号都会产生CRC效验码,每个数据块的传输也会长生CRC效验码。
这段程序是友善之臂推出的mini2440开发板中带的ADS测试源码。
整个阅读代码的过程是对这S3C2440的芯片手册和SD卡规范来看的,对于MMC卡没有给出注释,其实和SD卡是大同小异。
由于是初次接触ARM,对SD规范的认识也不是很深入,再加上自己水平有限,还不能完全读懂源代码,其中的肯定存在一些错误,欢迎大家一起交流讨论。
#define INT 1#define DMA 2int CMD13(void);// Send card statusint CMD9(void);unsigned int*Tx_buffer;//128[word]*16[blk]=8192[byte] unsigned int*Rx_buffer;//128[word]*16[blk]=8192[byte] volatile unsigned int rd_cnt;//读数据计数器volatile unsigned int wt_cnt;//写数据计数器volatile unsigned int block;//读写块总数volatile unsigned int TR_end=0;int Wide=0;// 0:1bit, 1:4bitint MMC=0;// 0:SD , 1:MMCint Maker_ID;char Product_Name[7];int Serial_Num;volatile int RCA;void Test_SDI(void){U32 save_rGPEUP, save_rGPECON;RCA=0;MMC=0;block=3072;//3072Blocks=1.5MByte,((2Block=1024Byte)*1024Block=1MByte)save_rGPEUP=rGPEUP;save_rGPECON=rGPECON;//**配置SD/MMC控制器rGPEUP = 0xf83f;// SDCMD, SDDAT[3:0] => PU En. rGPECON = 0xaaaaaaaa;//SDCMD, SDDAT[3:0]Uart_Printf("\nSDI Card Write and Read Test\n");if(!SD_card_init())//等待SD卡初始化完成return;TR_Buf_new();//发送数据缓冲区初始化Wt_Block();//写卡Rd_Block();//读卡View_Rx_buf();if(MMC)TR_Buf_new();if(MMC){rSDICON |=(1<<5);// YH 0519, MMC Type SDCLKWt_Stream();Rd_Stream();View_Rx_buf();}Card_sel_desel(0);// Card deselectif(!CMD9())Uart_Printf("Get CSD fail!!!\n");rSDIDCON=0;//tark???rSDICSTA=0xffff;rGPEUP=save_rGPEUP;rGPECON=save_rGPECON;}void TR_Buf_new(void)//发送数据缓冲区初始化{//-- Tx & Rx Buffer initializeint i, j;Tx_buffer=(unsigned int*)0x31000000;j=0;for(i=0;i<2048;i++)//128[word]*16[blk]=8192[byte]*(Tx_buffer+i)=i+j;Flush_Rx_buf();}void Flush_Rx_buf(void)//接收数据缓冲区清0{//-- Flushing Rx bufferint i;Rx_buffer=(unsigned int*)0x31800000;for(i=0;i<2048;i++)//128[word]*16[blk]=8192[byte]*(Rx_buffer+i)=0;Uart_Printf("End Rx buffer flush\n");}void View_Rx_buf(){//-- Display Rx bufferint i,error=0;Tx_buffer=(unsigned int*)0x31000000;Rx_buffer=(unsigned int*)0x31800000;Uart_Printf("Check Rx data\n");for(i=0;i<128*block;i++){if(Rx_buffer[i]!= Tx_buffer[i]){Uart_Printf("\nTx/Rx error\n");Uart_Printf("%d:Tx-0x%08x, Rx-0x%08x\n",i,Tx_buffer[i], Rx_buffer[i]);error=1;break;}}if(!error){Uart_Printf("\nThe Tx_buffer is same to Rx_buffer!\n");Uart_Printf("SD CARD Write and Read test is OK!\n");}}void View_Tx_buf(void){}int SD_card_init(void)//SD卡初始化{//-- SD controller & card initializeint i;/* Important notice for MMC test condition *//* Cmd & Data lines must be enabled by pull up resister */rSDIPRE=PCLK/(INICLK)-1;// 400KHzUart_Printf("Init. Frequency is %dHz\n",(PCLK/(rSDIPRE+1)));rSDICON=(1<<4)|1;//先传高位,再传低位,使能CLKrSDIFSTA=rSDIFSTA|(1<<16);//SDI FIFO status register,FIFO复位rSDIBSIZE=0x200;// SDI block size register,设置每块大小为512byte(128word)rSDIDTIMER=0x7fffff;// SDI data / busy timer register,设置超时周期for(i=0;i<0x1000;i++);// 延时,CARD自身初始化需要74个CLKCMD0();//发送CMD0Uart_Printf("In idle\n");//-- Check MMC card OCRif(Chk_MMC_OCR()){Uart_Printf("In MMC ready\n");MMC=1;goto RECMD2;}Uart_Printf("MMC check end!!\n");//-- Check SD card OCRif(Chk_SD_OCR())Uart_Printf("In SD ready\n");else{Uart_Printf("Initialize fail\nNo Card assertion\n");return 0;}RECMD2://检查连接的卡,识别卡的状态rSDICARG=0x0;// CMD2(stuff bit)rSDICCON=(0x1<<10)|(0x1<<9)|(0x1<<8)|0x42;//CMD2为长应答并等待应答,开始发//送CMD2,命令卡发回CID寄存器(保存了生产厂家/时间/批号等等),产生RSP2//检查CMD2是否成功发送并收到响应if(!Chk_CMDend(2, 1))goto RECMD2;//CMD2出错,重新发送rSDICSTA=0xa00;// 清除命令和应答结束标志位Uart_Printf("End id\n");RECMD3://--发送CMD3,给卡分配RCA,rSDICARG=MMC<<16;//CMD3参数, MMC:设置 RCA, SD:请求发RCArSDICCON=(0x1<<9)|(0x1<<8)|0x43;//CMD3为短应答并等待应答,开始发//送CMD3, MMC(设置RCA,产生RSP1),SD(设置RCA,产生RSP6)//检查CMD3是否成功发送并收到响应if(!Chk_CMDend(3, 1))goto RECMD3;//CMD3出错,重新发送rSDICSTA=0xa00;// 清除命令和应答结束标志位//--Publish RCAif(MMC){RCA=1;rSDIPRE=(PCLK/MMCCLK)-1;Uart_Printf("MMC Frequency is %dHz\n",(PCLK/(rSDIPRE+1)));}else{RCA=( rSDIRSP0 & 0xffff0000 )>>16;//回读RCA,卡被分配RCA后进入//TransferMODE,准备读写Uart_Printf("RCA=0x%x\n",RCA);rSDIPRE=PCLK/(SDCLK)-1;// Normal clock=25MHzUart_Printf("SD Frequency is %dHz\n",(PCLK/(rSDIPRE+1)));}//--State(stand-by) check//根据SD规范,rSDIRSP0高16位存储RCA,低16位存储CARD的状态if(rSDIRSP0 &0x1e00!=0x600 )// 检查CARD状态,不是处于stand-by 状态goto RECMD3;////未就绪,重新发送CMD3Uart_Printf("In stand-by\n");Card_sel_desel(1);// Selectif(!MMC)//若位SD卡,设置4bit的数据传输模式Set_4bit_bus();else//若位MMC卡,设置1bit的数据传输模式Set_1bit_bus();return 1;}void Card_sel_desel(char sel_desel){//-- Card select or deselectif(sel_desel)//选择该卡{RECMDS7://送CMD7表示选择该卡,准备读写,产生RSP1.rSDICARG=RCA<<16;// CMD7参数(RCA,stuff bit),其中高16位为RCA rSDICCON=(0x1<<9)|(0x1<<8)|0x47;//CMD7为短应答并等待应答,开始发//送CMD7选择该卡,准备读写,产生RSP1//检查CMD7是否成功发送并收到响应if(!Chk_CMDend(7, 1))goto RECMDS7;//出错,重新发送rSDICSTA=0xa00;//清除命令和应答结束标志位//检查是否处于transfer modeif( rSDIRSP0 & 0x1e00!=0x800 )goto RECMDS7;//不处于transfer mode,重新发送CMD7}else//卸载该卡{RECMDD7:rSDICARG=0<<16;// CMD7参数(RCA,stuff bit),其中高16位为RCA rSDICCON=(0x1<<8)|0x47;// 无应答并,并开始发送CMD7//检查CMD7是否成功if(!Chk_CMDend(7, 0))goto RECMDD7;//失败,重新卸载rSDICSTA=0x800;// //清除命令结束标志位}}void __irq Rd_Int(void)//读中断函数U32 i,status;status=rSDIFSTA;if((status&0x200)== 0x200 )//检查接收FIFO最后是否有数据到来{for(i=(status & 0x7f)/4;i>0;i--){*Rx_buffer++=rSDIDAT;rd_cnt++;}rSDIFSTA=rSDIFSTA&0x200;//清 Rx FIFO Last data Ready标志位}else if((status&0x80)== 0x80 )// 检查Half FULL interrupt标志,只要大于31个字节,就会将该标志置1{for(i=0;i<8;i++){*Rx_buffer++=rSDIDAT;rd_cnt++;}}ClearPending(BIT_SDI);//清零源中断挂起寄存器和中断挂起寄存器}void __irq Wt_Int(void)//写中断函数ClearPending(BIT_SDI);//清零源中断挂起寄存器和中断挂起寄存器rSDIDAT=*Tx_buffer++;wt_cnt++;if(wt_cnt==128*block){rINTMSK |= BIT_SDI;//屏蔽BIT_SDI中断rSDIDAT=*Tx_buffer;TR_end=1;}}void __irq DMA_end(void){ClearPending(BIT_DMA0);//清零源中断挂起寄存器和中断挂起寄存器TR_end=1;}void Rd_Block(void){U32 mode;int status;rd_cnt=0;Uart_Printf("Block read test[ Polling read ]\n");mode = 0 ;rSDIFSTA=rSDIFSTA|(1<<16);// 复位FIFOif(mode!=2)rSDIDCON=(2<<22)|(1<<19)|(1<<17)|(Wide<<16)|(1<<14)|(2<<12)|(block <<0);//YH 040220//设置数据控制寄存器:字传输,块数据传输,4bit数据传输,开始数据传输,数据发送模//式,共读block个块rSDICARG=0x0;// CMD17/18地址参数RERDCMD:switch(mode){case POL:if(block<2)// SINGLE_READ写单块{rSDICCON=(0x1<<9)|(0x1<<8)|0x51;//CMD17为短应答并等待应答,开始发//送CMD17单块读命令,开始读,产生RSP1if(!Chk_CMDend(17, 1))//-- Check end of CMD17goto RERDCMD;//失败,继续发送}else// MULTI_READ,读多块{rSDICCON=(0x1<<9)|(0x1<<8)|0x52;//CMD18为短应答并等待应答,开始发//送CMD18多块读命令,开始读,产生RSP1if(!Chk_CMDend(18, 1))//-- Check end of CMD18goto RERDCMD;//失败,继续发送}rSDICSTA=0xa00;// 清命令和应答结束标志while(rd_cnt<128*block)// 512块个字节{if((rSDIDSTA&0x20)==0x20)// 是否超时{rSDIDSTA=(0x1<<0x5);// 清超时标志位break;}status=rSDIFSTA;if((status&0x1000)==0x1000)// FIFO非空{*Rx_buffer++=rSDIDAT;rd_cnt++;}}break;case INT:pISR_SDI=(unsigned)Rd_Int;rINTMSK =~(BIT_SDI);//屏蔽除所有其他中断rSDIIMSK=5;// 开启Last & Rx FIFO half 中断.if(block<2)// SINGLE_READ{rSDICCON=(0x1<<9)|(0x1<<8)|0x51;//CMD17为短应答并等待应答,开始发//送CMD17单块读命令,开始读,产生RSP1if(!Chk_CMDend(17, 1))//-- Check end of CMD17goto RERDCMD;//失败,继续发送}else// MULTI_READ{rSDICCON=(0x1<<9)|(0x1<<8)|0x52;//CMD18为短应答并等待应答,开始发//送CMD18多块读命令,开始读,产生RSP1if(!Chk_CMDend(18, 1))//-- Check end of CMD18goto RERDCMD;//失败,继续发送}rSDICSTA=0xa00;// 清命令和应答结束标志while(rd_cnt<128*block);rINTMSK |=(BIT_SDI);//屏蔽BIT_SDI中断rSDIIMSK=0;//屏蔽所有中断break;case DMA:pISR_DMA0=(unsigned)DMA_end;rINTMSK =~(BIT_DMA0);rSDIDCON=rSDIDCON|(1<<24);//YH 040227, Burst4 EnablerDISRC0=(int)(SDIDAT);// SDIDATrDISRCC0=(1<<1)+(1<<0);// APB, fixrDIDST0=(U32)(Rx_buffer);// Rx_bufferrDIDSTC0=(0<<1)+(0<<0);// AHB, incrDCON0=(1<<31)+(0<<30)+(1<<29)+(0<<28)+(0<<27)+(2<<24)+(1<<23) +(1<<22)+(2<<20)+128*block;rDMASKTRIG0=(0<<2)+(1<<1)+0;//no-stop, DMA2 channel on, no-swtriggerrSDIDCON=(2<<22)|(1<<19)|(1<<17)|(Wide<<16)|(1<<15)|(1<<14)|(2 <<12)|(block<<0);if(block<2)// SINGLE_READ{rSDICCON=(0x1<<9)|(0x1<<8)|0x51;// sht_resp, wait_resp, dat, start, CMD17if(!Chk_CMDend(17, 1))//-- Check end of CMD17goto RERDCMD;}else// MULTI_READ{rSDICCON=(0x1<<9)|(0x1<<8)|0x52;// sht_resp, wait_resp, dat, start, CMD18if(!Chk_CMDend(18, 1))//-- Check end of CMD18goto RERDCMD;}rSDICSTA=0xa00;// Clear cmd_end(with rsp)while(!TR_end);//Uart_Printf("rSDIFSTA=0x%x\n",rSDIFSTA);rINTMSK |=(BIT_DMA0);TR_end=0;rDMASKTRIG0=(1<<2);//DMA0 stopbreak;default:break;}//-- Check end of DATAif(!Chk_DATend())Uart_Printf("dat error\n");rSDIDCON=rSDIDCON&~(7<<12);rSDIFSTA=rSDIFSTA&0x200;//Clear Rx FIFO Last data Ready, YH 040221 rSDIDSTA=0x10;// Clear data Tx/Rx end detectif(block>1){RERCMD12://--Stop cmd(CMD12)rSDICARG=0x0;//CMD12(stuff bit)rSDICCON=(0x1<<9)|(0x1<<8)|0x4c;//sht_resp, wait_resp, start, CMD12 //-- Check end of CMD12if(!Chk_CMDend(12, 1))goto RERCMD12;rSDICSTA=0xa00;// Clear cmd_end(with rsp)}}void Rd_Stream(void)// only for MMC, 3blk read{int status, rd_cnt=0;if(MMC!=1){Uart_Printf("Stream read command supports only MMC!\n"); return;}Uart_Printf("\n[Stream read test]\n");RECMD11:rSDIDCON=(2<<22)|(1<<19)|(0<<17)|(0<<16)|(1<<14)|(2<<12);rSDICARG=0x0;// CMD11(addr)rSDICCON=(0x1<<9)|(0x1<<8)|0x4b;//sht_resp, wait_resp, dat, start, CMD11while(rd_cnt<128*block){if((rSDIDSTA&0x20)== 0x20 ){Uart_Printf("Rread timeout error");return;}status=rSDIFSTA;if((status&0x1000)==0x1000){//*Rx_buffer++=rSDIDAT;//rd_cnt++;Rx_buffer[rd_cnt++]=rSDIDAT;}}//-- Check end of CMD11if(!Chk_CMDend(11, 1))goto RECMD11;rSDICSTA=0xa00;// Clear cmd_end(with rsp)//-- Check end of DATArSDIDCON=(2<<22)|(1<<19)|(0<<17)|(0<<16);//YH 040220rSDIDCON=rSDIDCON&~(7<<12);//YH 040220, no operation, data readywhile( rSDIDSTA&0x3 !=0x0 );if(rSDIDSTA!=0)Uart_Printf("rSDIDSTA=0x%x\n", rSDIDSTA);rSDIDSTA=0xff;//YH 040221STRCMD12://--Stop cmd(CMD12)rSDICARG=0x0;//CMD12(stuff bit)rSDICCON=(0x1<<9)|(0x1<<8)|0x4c;//sht_resp, wait_resp, start, CMD12//-- Check end of CMD12if(!Chk_CMDend(12, 1))goto STRCMD12;rSDICSTA=0xa00;// Clear cmd_end(with rsp)rSDIFSTA=rSDIFSTA&0x200;//Clear Rx FIFO Last data Ready, YH 040221 Uart_Printf("rSDIFSTA1=0x%x\n", rSDIFSTA);//YH 040221rSDIFSTA=rSDIFSTA&0x200;//Clear Rx FIFO Last data Ready, YH 040221Uart_Printf("rSDIFSTA2=0x%x\n", rSDIFSTA);//YH 040221Uart_Printf("\n--End stream read test\n");}void Wt_Block(void){U32 mode;int status;wt_cnt=0;Uart_Printf("Block write test[ Polling write ]\n");mode = 0 ;rSDIFSTA=rSDIFSTA|(1<<16);//复位FIFOif(mode!=2)rSDIDCON=(2<<22)|(1<<20)|(1<<17)|(Wide<<16)|(1<<14)|(3<<12)|(block <<0);//设置数据控制寄存器:字传输,块数据传输,4bit数据传输,开始数据传输,数据发送模//式,共写block个块rSDICARG=0x0;// CMD24/25地址参数REWTCMD:switch(mode){case POL:if(block<2)// SINGLE_WRITE,写单块{rSDICCON=(0x1<<9)|(0x1<<8)|0x58;//CMD24为短应答并等待应答,开始发//送CMD24单块写命令,开始写,产生RSP1if(!Chk_CMDend(24, 1))//-- Check end of CMD24goto REWTCMD;//命令发送失败}else// MULTI_WRITE,写多块{rSDICCON=(0x1<<9)|(0x1<<8)|0x59;//CMD25为短应答并等待应答,开发//送CMD25多块写命令,开始读写,产生RSP1if(!Chk_CMDend(25, 1))//-- Check end of CMD25goto REWTCMD;//命令发送失败}rSDICSTA=0xa00;// 清命令和应答结束标志while(wt_cnt<128*block){status=rSDIFSTA;if((status&0x2000)==0x2000)//FIFO未满{rSDIDAT=*Tx_buffer++;wt_cnt++;//Uart_Printf("Block No.=%d, wt_cnt=%d\n",block,wt_cnt);}}break;case INT:pISR_SDI=(unsigned)Wt_Int;rINTMSK =~(BIT_SDI);rSDIIMSK=0x10;// Tx FIFO half int.if(block<2)// SINGLE_WRITE{rSDICCON=(0x1<<9)|(0x1<<8)|0x58;//sht_resp, wait_resp, dat, start, CMD24if(!Chk_CMDend(24, 1))//-- Check end of CMD24goto REWTCMD;}else// MULTI_WRITE{rSDICCON=(0x1<<9)|(0x1<<8)|0x59;//sht_resp, wait_resp, dat, start, CMD25if(!Chk_CMDend(25, 1))//-- Check end of CMD25goto REWTCMD;}rSDICSTA=0xa00;// Clear cmd_end(with rsp)while(!TR_end);//while(wt_cnt<128);rINTMSK |=(BIT_SDI);TR_end=0;rSDIIMSK=0;// All maskbreak;case DMA:pISR_DMA0=(unsigned)DMA_end;rINTMSK =~(BIT_DMA0);rSDIDCON=rSDIDCON|(1<<24);//YH 040227, Burst4 EnablerDISRC0=(int)(Tx_buffer);// Tx_bufferrDISRCC0=(0<<1)+(0<<0);// AHB, incrDIDST0=(U32)(SDIDAT);// SDIDATrDIDSTC0=(1<<1)+(1<<0);// APB, fixrDCON0=(1<<31)+(0<<30)+(1<<29)+(0<<28)+(0<<27)+(2<<24)+(1<<23) +(1<<22)+(2<<20)+128*block;//handshake, sync PCLK, TC int, single tx, single service, SDI, H/W request,//auto-reload off, word, 128blk*numrDMASKTRIG0=(0<<2)+(1<<1)+0;//no-stop, DMA0 channel on, no-swtriggerrSDIDCON=(2<<22)|(1<<20)|(1<<17)|(Wide<<16)|(1<<15)|(1<<14)|(3<<1 2)|(block<<0);//YH 040220// Word Tx, Tx after rsp, blk, 4bit bus, dma enable, Tx start, blk numif(block<2)// SINGLE_WRITE{rSDICCON=(0x1<<9)|(0x1<<8)|0x58;//sht_resp, wait_resp, dat, start, CMD24if(!Chk_CMDend(24, 1))//-- Check end of CMD24goto REWTCMD;}else// MULTI_WRITE{rSDICCON=(0x1<<9)|(0x1<<8)|0x59;//sht_resp, wait_resp, dat, start, CMD25if(!Chk_CMDend(25, 1))//-- Check end of CMD25goto REWTCMD;}rSDICSTA=0xa00;// Clear cmd_end(with rsp)while(!TR_end);rINTMSK |=(BIT_DMA0);TR_end=0;rDMASKTRIG0=(1<<2);//DMA0 stopbreak;default:break;}//-- Check end of DATAif(!Chk_DATend())Uart_Printf("dat error\n");rSDIDCON=rSDIDCON&~(7<<12);//YH 040220, Clear Data Transfer mode => no operation, Cleata Data Transfer startrSDIDSTA=0x10;// Clear data Tx/Rx endif(block>1){//--Stop cmd(CMD12)REWCMD12:rSDIDCON=(1<<18)|(1<<17)|(0<<16)|(1<<14)|(1<<12)|(block<<0);//YH 040220rSDICARG=0x0;//CMD12(stuff bit)rSDICCON=(0x1<<9)|(0x1<<8)|0x4c;//sht_resp, wait_resp, start, CMD12 //-- Check end of CMD12if(!Chk_CMDend(12, 1))goto REWCMD12;rSDICSTA=0xa00;// Clear cmd_end(with rsp)//-- Check end of DATA(with busy state)if(!Chk_BUSYend())Uart_Printf("error\n");rSDIDSTA=0x08;//! Should be cleared by writing '1'.}}void Wt_Stream(void)// only for MMC, 3blk write{int status, wt_cnt=0;if(MMC!=1){Uart_Printf("Stream write command supports only MMC!\n");return;}Uart_Printf("\n[Stream write test]\n");RECMD20:rSDIDCON=(2<<22)|(1<<20)|(0<<17)|(0<<16)|(1<<14)|(3<<12);// stream moderSDICARG=0x0;// CMD20(addr)rSDICCON=(0x1<<9)|(0x1<<8)|0x54;//sht_resp, wait_resp, dat, start, CMD20//-- Check end of CMD25if(!Chk_CMDend(20, 1))goto RECMD20;rSDICSTA=0xa00;// Clear cmd_end(with rsp)while(wt_cnt<128*block){status=rSDIFSTA;if((status&0x2000)==0x2000)rSDIDAT=Tx_buffer[wt_cnt++];}//-- Check end of DATAwhile( rSDIFSTA&0x400 );Delay(10);// for the empty of DATA line(Hardware)rSDIDCON=(1<<20)|(0<<17)|(0<<16);//YH 040220rSDIDCON=rSDIDCON&~(7<<12);//YH 040220, no operation, data readywhile((rSDIDSTA&0x3)!=0x0 );if(rSDIDSTA!=0x0)Uart_Printf("rSDIDSTA=0x%x\n", rSDIDSTA);rSDIDSTA=0xff;//Clear rSDIDSTASTWCMD12://--Stop cmd(CMD12)rSDIDCON=(1<<18)|(1<<17)|(0<<16)|(1<<14)|(1<<12);rSDICARG=0x0;//CMD12(stuff bit)rSDICCON=(0x1<<9)|(0x1<<8)|0x4c;//sht_resp, wait_resp, start, CMD12//-- Check end of CMD12if(!Chk_CMDend(12, 1))goto STWCMD12;rSDICSTA=0xa00;// Clear cmd_end(with rsp)//-- Check end of DATA(with busy state)if(!Chk_BUSYend())Uart_Printf("error\n");rSDIDSTA=0x08;Uart_Printf("\n--End Stream write test\n");}int Chk_CMDend(int cmd,int be_resp)//0: Timeout{int finish0;if(!be_resp)// 没有应答信号{finish0=rSDICSTA;//读取SDI command status register,while((finish0&0x800)!=0x800)// 等待命令结束finish0=rSDICSTA;rSDICSTA=finish0;// 清命令结束标志return 1;//成功,返回1}else// 有应答信号{finish0=rSDICSTA;//读取SDI command status register,while(!(((finish0&0x200)==0x200)|((finish0&0x400)==0x400)))//检查超时和应答信号finish0=rSDICSTA;if(cmd==1 | cmd==41)// CRC no check, CMD9 is a long Resp. command.{if((finish0&0xf00)!= 0xa00 )// 命令,应答有错,或超时{rSDICSTA=finish0;// 清错误标志if(((finish0&0x400)==0x400))// 若超时,返回0return 0;}rSDICSTA=finish0;// 清命令和应答结束标志}else// 进行CRC效验{if((finish0&0x1f00)!= 0xa00 )// CRC效验出错{Uart_Printf("CMD%d:rSDICSTA=0x%x, rSDIRSP0=0x%x\n",cmd, rSDICSTA, rSDIRSP0);//输出对应寄存器的值rSDICSTA=finish0;// 清除错误标志位if(((finish0&0x400)==0x400))// 若超时,返回0return 0;}rSDICSTA=finish0;}return 1;}}int Chk_DATend(void){int finish;finish=rSDIDSTA;while(!(((finish&0x10)==0x10)|((finish&0x20)==0x20)))// 检查数据结束和超时位finish=rSDIDSTA;if((finish&0xfc)!= 0x10 )//数据传输结束{Uart_Printf("DATA:finish=0x%x\n", finish);rSDIDSTA=0xec;//清除错误标志return 0;}return 1;}int Chk_BUSYend(void){int finish;finish=rSDIDSTA;while(!(((finish&0x08)==0x08)|((finish&0x20)==0x20)))//检查忙标志位finish=rSDIDSTA;if((finish&0xfc)!= 0x08 ){Uart_Printf("DATA:finish=0x%x\n", finish);rSDIDSTA=0xf4;//清除错误标志return 0;}return 1;}void CMD0(void)//CMD0用于对SD实现软件复位,不论卡处于何种状态,使SD卡处于//空闲状态,等待下一个命令的到来{//-- Make card idle staterSDICARG=0x0;// ,CMD0(stuff bit)rSDICCON=(1<<8)|0x40;// 不等待应答信号,命令开始//并再次发送CMD0 关于cmd0定义:0(start_bit)1(cmd标志)000000(6位cmd编//码)后面是参数(无参数就全0)//-- Check end of CMD0Chk_CMDend(0, 0);// 检查命令是否成功发送rSDICSTA=0x800;// 清除命令结束标志}int Chk_MMC_OCR(void){int i;//-- MMC卡识别的等待操作, 使卡处于空闲状态for(i=0;i<100;i++)//等待的时间取决于厂商{// rSDICARG=0xffc000; //CMD1(MMC OCR:2.6V~3.6V),设置工作电压rSDICARG=0xff8000;//CMD1(SD OCR:2.7V~3.6V),设置工作电压rSDICCON=(0x1<<9)|(0x1<<8)|0x41;//CMD1为短应答并等待应答,开始发送CMD1//-- 检查CMD1是否发送成功,并检查卡状态// if(Chk_CMDend(1, 1) & rSDIRSP0==0x80ffc000) //31:忙状态标志位,0表示忙//0xffc000为卡的正常工作电压范围if(Chk_CMDend(1, 1)&&(rSDIRSP0>>16)==0x80ff)//卡处于空闲// if(Chk_CMDend(1, 1) & rSDIRSP0==0x80ff8000)rSDICSTA=0xa00;// 清除命令和应答结束标志位return 1;// 成功}}rSDICSTA=0xa00;//清除命令和应答结束标志位return 0;// 失败}int Chk_SD_OCR(void){int i;//-- SD卡识别的等待操作, 使卡处于空闲状态for(i=0;i<50;i++)// 如果这段时间太短,SD卡的初始化可能会失败{CMD55();//送CMD55,表示下个命令将是特殊功能命令acmd,而非一般命令cmdrSDICARG=0xff8000;//ACMD41(SD OCR:2.7V~3.6V) ,设置工作电压// rSDICARG=0xffc000;//ACMD41(MMC OCR:2.6V~3.6V)设置工作电压rSDICCON=(0x1<<9)|(0x1<<8)|0x69;// ACMD41为短应答并等待应答,开始发//送ACMD41,命令卡发回OCR寄存器(保存了电压参数/busy信号等等),产生//-- 检查ACMD41是否发送成功,并检查卡状态if( Chk_CMDend(41, 1)& rSDIRSP0==0x80ff8000 )//发送成功并且卡处于空闲状态{rSDICSTA=0xa00;//清除命令和应答结束标志位return 1;//成功}Delay(200);//等待卡上电后处于空闲状态}//Uart_Printf("SDIRSP0=0x%x\n",rSDIRSP0);rSDICSTA=0xa00;//清除命令和应答结束标志位return 0;// 失败}int CMD55(void){//CMD55,表示下个命令将是特殊功能acmd,而非一般命令cmdrSDICARG=RCA<<16;//CMD55(RCA,stuff bit)rSDICCON=(0x1<<9)|(0x1<<8)|0x77;//CMD55为短应答(R1)并等待应答,并开始发送CMD55//-- 检查CMD55是成功发送if(!Chk_CMDend(55, 1))return 0;//出错,返回rSDICSTA=0xa00;////清除命令和应答结束标志位return 1;}int CMD13(void)//送CMD13,命令卡的当前状态{int response0;rSDICARG=RCA<<16;// CMD13(RCA,stuff bit),高16位为RCArSDICCON=(0x1<<9)|(0x1<<8)|0x4d;//CMD13为短应答(R1)并等待应答,并开始发送CMD13//-- Check end of CMD13if(!Chk_CMDend(13, 1))//-- 检查CMD13是成功发送return 0;//出错,返回//Uart_Printf("rSDIRSP0=0x%x\n", rSDIRSP0);if(rSDIRSP0&0x100)//数据是否就绪//Uart_Printf("Ready for Data\n");// else//Uart_Printf("Not Ready\n");response0=rSDIRSP0;response0 &= 0x3c00;response0 = response0 >> 9;//Uart_Printf("Current Status=%d\n", response0);if(response0==6)//卡处于receive data stateTest_SDI();rSDICSTA=0xa00;//清除命令和应答结束标志位return 1;}int CMD9(void)//送CMD9,命令卡发回CSD寄存器(保存了读写参数/卡的容量等内容),产生RSP2{rSDICARG=RCA<<16;// CMD9参数,高16位为RCArSDICCON=(0x1<<10)|(0x1<<9)|(0x1<<8)|0x49;//CMD9为长应答并等待应答,开始发//送CMD9,产生RSP2Uart_Printf("\nCSD register :\n");//-- Check end of CMD9if(!Chk_CMDend(9, 1))// 检查命令是否成功发送return 0;//失败则返回Uart_Printf("SDIRSP0=0x%x\nSDIRSP1=0x%x\nSDIRSP2=0x%x\nSDIRSP3= 0x%x\n", rSDIRSP0,rSDIRSP1,rSDIRSP2,rSDIRSP3);return 1;}void Set_1bit_bus(void)//设置1位数据线{Wide=0;if(!MMC)SetBus();//Uart_Printf("\n****1bit bus****\n");}void Set_4bit_bus(void)//设置4位数据线{Wide=1;SetBus();//Uart_Printf("\n****4bit bus****\n");}void SetBus(void)//设置数据线宽度{SET_BUS:CMD55();//CMD55,表示下个命令将是特殊功能acmd,而非一般命令cmdrSDICARG=Wide<<1;//数据宽度00: 1bit, 10: 4bitrSDICCON=(0x1<<9)|(0x1<<8)|0x46;//ACMD6为短应答(R1)并等待应答,并开始发送// ACMD6设置数据线宽度位4bitif(!Chk_CMDend(6, 1))// 设置失败,则重新设置goto SET_BUS;rSDICSTA=0xa00;//清除命令和应答结束标志位}void Set_Prt(void)//写保护{//-- Set protection addr.0 ~ 262144(32*16*512)Uart_Printf("[Set protection(addr.0 ~ 262144) test]\n"); RECMD28://--Make ACMDrSDICARG=0;// CMD28(addr)rSDICCON=(0x1<<9)|(0x1<<8)|0x5c;//sht_resp, wait_resp, start, CMD28//-- Check end of CMD28if(!Chk_CMDend(28, 1))goto RECMD28;rSDICSTA=0xa00;// Clear cmd_end(with rsp)}void Clr_Prt(void)//清除写保护{//-- Clear protection addr.0 ~ 262144(32*16*512)//Uart_Printf("[Clear protection(addr.0 ~ 262144) test]\n");RECMD29://--Make ACMDrSDICARG=0;// CMD29(addr)rSDICCON=(0x1<<9)|(0x1<<8)|0x5d;//sht_resp, wait_resp, start, CMD29//-- Check end of CMD29。
sd卡数据读写流程

SD卡数据读写流程引言SD卡(Secure Digital Card)是一种常用的存储设备,通常用于移动设备、相机等电子产品中。
在使用SD卡时,数据的读写是一个非常重要的过程。
本文将详细介绍SD卡的数据读写流程,包括初始化、文件操作和数据传输等环节。
初始化SD卡初始化SD卡是数据读写的第一步,确保SD卡可以被正确地识别和使用。
下面是SD卡数据读写的初始化流程:1.插入SD卡:将SD卡插入目标设备的SD卡插槽中。
2.电源供给:为SD卡提供稳定的电源,通常通过连接电源线或使用内置电池来实现。
3.延时等待:等待SD卡稳定,一般为几毫秒的时间。
4.发送命令:通过SPI或SDIO等接口向SD卡发送特定的命令,以初始化SD卡。
5.接收响应:SD卡将返回初始化成功与否的响应,如果初始化成功,则可以进行后续的数据读写操作。
SD卡文件系统在进行数据读写之前,需要先设置SD卡的文件系统。
常用的文件系统包括FAT16、FAT32和exFAT等。
下面是SD卡文件系统的设置流程:1.格式化SD卡:使用格式化工具对SD卡进行格式化,以清除原有的文件系统和数据。
2.创建分区:根据需求,可以将SD卡分为一个或多个分区,并设置每个分区的大小。
3.创建文件系统:选择合适的文件系统类型,在分区上创建文件系统,并分配文件系统的容量。
4.分配文件表:文件系统会维护一个文件表,记录文件的位置、大小等信息。
在创建文件系统时,会分配一块空间来存储文件表。
5.设置文件权限:根据需要,可以设置文件的读写、执行权限,以保证文件的安全性。
SD卡数据读写操作SD卡的数据读写操作包括文件的创建、打开、读取、写入和关闭等。
下面是SD卡数据读写操作的详细流程:1.创建文件:通过文件系统接口,调用相关函数创建一个新的文件,并指定文件的名称和路径。
2.打开文件:使用文件系统的函数打开已经存在的文件,以便后续的读取和写入操作。
3.读取文件:通过文件系统提供的函数,在已经打开的文件中进行读取操作。
SD卡读写包括两种模式

SD卡读写包括两种模式SD卡读写包括两种模式:SD模式和SPI模式。
其中SD模式又可以分为1bit 和4bit两种传输模式。
SD卡缺省使用专有的SD模式。
SD卡规范中主要讲了一些命令,响应和CRC效验等等,整个规范的内容还是很多的。
SD卡上电后,卡处于空闲状态,主机发送CMD0复位SD卡,然后通过CMD55和ACMD41判断当前电压是否在卡的工作范围内。
在得到了正确的响应后,主机可以继续通过CMD10读取SD卡的CID寄存器,通过CMD16设置数据块长度,通过CMD9读取卡的CSD寄存器。
从CSD寄存器中,主机可以获知卡容量,支持的命令集等重要参数。
此时,卡以进入了传输状态,主机就可以通过CMD17/18和CMD24/25对卡进行读写。
CRC校验是为了防止SD卡的命令,应答,数据传输出现错误。
每个命令和应答信号都会产生CRC效验码,每个数据块的传输也会长生CRC效验码。
这段程序是友善之臂推出的mini2440开发板中带的ADS测试源码。
整个阅读代码的过程是对这S3C2440的芯片手册和SD卡规范来看的,对于MMC卡没有给出注释,其实和SD卡是大同小异。
由于是初次接触ARM,对SD规范的认识也不是很深入,再加上自己水平有限,还不能完全读懂源代码,其中的肯定存在一些错误,欢迎大家一起交流讨论。
#define INT 1#define DMA 2int CMD13(void);// Send card statusint CMD9(void);unsigned int*Tx_buffer;//128[word]*16[blk]=8192[byte] unsigned int*Rx_buffer;//128[word]*16[blk]=8192[byte] volatile unsigned int rd_cnt;//读数据计数器volatile unsigned int wt_cnt;//写数据计数器volatile unsigned int block;//读写块总数volatile unsigned int TR_end=0;int Wide=0;// 0:1bit, 1:4bitint MMC=0;// 0:SD , 1:MMCint Maker_ID;char Product_Name[7];int Serial_Num;volatile int RCA;void Test_SDI(void){U32 save_rGPEUP, save_rGPECON;RCA=0;MMC=0;block=3072;//3072Blocks=1.5MByte,((2Block=1024Byte)*1024Block=1MByte)save_rGPEUP=rGPEUP;save_rGPECON=rGPECON;//**配置SD/MMC控制器rGPEUP = 0xf83f;// SDCMD, SDDAT[3:0] => PU En. rGPECON = 0xaaaaaaaa;//SDCMD, SDDAT[3:0]Uart_Printf("\nSDI Card Write and Read Test\n");if(!SD_card_init())//等待SD卡初始化完成return;TR_Buf_new();//发送数据缓冲区初始化Wt_Block();//写卡Rd_Block();//读卡View_Rx_buf();if(MMC)TR_Buf_new();if(MMC){rSDICON |=(1<<5);// YH 0519, MMC Type SDCLKWt_Stream();Rd_Stream();View_Rx_buf();}Card_sel_desel(0);// Card deselectif(!CMD9())Uart_Printf("Get CSD fail\n");rSDIDCON=0;//tarkrSDICSTA=0xffff;rGPEUP=save_rGPEUP;rGPECON=save_rGPECON;}void TR_Buf_new(void)//发送数据缓冲区初始化{//-- Tx & Rx Buffer initializeint i, j;Tx_buffer=(unsigned int*)0x31000000;j=0;for(i=0;i<2048;i++)//128[word]*16[blk]=8192[byte] *(Tx_buffer+i)=i+j;Flush_Rx_buf();}void Flush_Rx_buf(void)//接收数据缓冲区清0{//-- Flushing Rx bufferint i;Rx_buffer=(unsigned int*)0x31800000;for(i=0;i<2048;i++)//128[word]*16[blk]=8192[byte] *(Rx_buffer+i)=0;Uart_Printf("End Rx buffer flush\n");}void View_Rx_buf(){//-- Display Rx bufferint i,error=0;Tx_buffer=(unsigned int*)0x31000000;Rx_buffer=(unsigned int*)0x31800000;Uart_Printf("Check Rx data\n");for(i=0;i<128*block;i++){if(Rx_buffer[i]!= Tx_buffer[i]){Uart_Printf("\nTx/Rx error\n");Uart_Printf("%d:Tx-0x%08x, Rx-0x%08x\n",i,Tx_buffer[i], Rx_buffer[i]);error=1;break;}}if(!error){Uart_Printf("\nThe Tx_buffer is same to Rx_buffer!\n");Uart_Printf("SD CARD Write and Read test is OK!\n");}}void View_Tx_buf(void){}int SD_card_init(void)//SD卡初始化{//-- SD controller & card initializeint i;/* Important notice for MMC test condition *//* Cmd & Data lines must be enabled by pull up resister */rSDIPRE=PCLK/(INICLK)-1;// 400KHzUart_Printf("Init. Frequency is %dHz\n",(PCLK/(rSDIPRE+1)));rSDICON=(1<<4)|1;//先传高位,再传低位,使能CLKrSDIFSTA=rSDIFSTA|(1<<16);//SDI FIFO status register,FIFO 复位rSDIBSIZE=0x200;// SDI block size register,设置每块大小为512byte(128word)rSDIDTIMER=0x7fffff;// SDI data / busy timer register,设置超时周期for(i=0;i<0x1000;i++);// 延时,CARD自身初始化需要74个CLKCMD0();//发送CMD0Uart_Printf("In idle\n");//-- Check MMC card OCRif(Chk_MMC_OCR()){Uart_Printf("In MMC ready\n");MMC=1;goto RECMD2;}Uart_Printf("MMC check end!!\n");//-- Check SD card OCRif(Chk_SD_OCR())Uart_Printf("In SD ready\n");else{Uart_Printf("Initialize fail\nNo Card assertion\n");return 0;}RECMD2://检查连接的卡,识别卡的状态rSDICARG=0x0;// CMD2(stuff bit)rSDICCON=(0x1<<10)|(0x1<<9)|(0x1<<8)|0x42;//CMD2为长应答并等待应答,开始发//送CMD2,命令卡发回CID寄存器(保存了生产厂家/时间/批号等等),产生RSP2//检查CMD2是否成功发送并收到响应if(!Chk_CMDend(2, 1))goto RECMD2;//CMD2出错,重新发送rSDICSTA=0xa00;// 清除命令和应答结束标志位Uart_Printf("End id\n");RECMD3://--发送CMD3,给卡分配RCA,rSDICARG=MMC<<16;//CMD3参数,MMC:设置RCA, SD:请求发RCArSDICCON=(0x1<<9)|(0x1<<8)|0x43;//CMD3为短应答并等待应答,开始发//送CMD3, MMC(设置RCA,产生RSP1),SD(设置RCA,产生RSP6)//检查CMD3是否成功发送并收到响应if(!Chk_CMDend(3, 1))goto RECMD3;//CMD3出错,重新发送rSDICSTA=0xa00;// 清除命令和应答结束标志位//--Publish RCAif(MMC){RCA=1;rSDIPRE=(PCLK/MMCCLK)-1;Uart_Printf("MMC Frequency is %dHz\n",(PCLK/(rSDIPRE+1)));}else{RCA=( rSDIRSP0 & 0xffff0000 )>>16;//回读RCA,卡被分配RCA 后进入//TransferMODE,准备读写Uart_Printf("RCA=0x%x\n",RCA);rSDIPRE=PCLK/(SDCLK)-1;// Normal clock=25MHzUart_Printf("SD Frequency is %dHz\n",(PCLK/(rSDIPRE+1)));}//--State(stand-by) check//根据SD规范,rSDIRSP0高16位存储RCA,低16位存储CARD的状态if(rSDIRSP0 &0x1e00!=0x600 )// 检查CARD状态,不是处于stand-by 状态goto RECMD3;////未就绪,重新发送CMD3Uart_Printf("In stand-by\n");Card_sel_desel(1);// Selectif(!MMC)//若位SD卡,设置4bit的数据传输模式Set_4bit_bus();else//若位MMC卡,设置1bit的数据传输模式Set_1bit_bus();return 1;}void Card_sel_desel(char sel_desel){//-- Card select or deselectif(sel_desel)//选择该卡{RECMDS7://送CMD7表示选择该卡,准备读写,产生RSP1.rSDICARG=RCA<<16;// CMD7参数(RCA,stuff bit),其中高16位为RCA rSDICCON=(0x1<<9)|(0x1<<8)|0x47;//CMD7为短应答并等待应答,开始发//送CMD7选择该卡,准备读写,产生RSP1//检查CMD7是否成功发送并收到响应if(!Chk_CMDend(7, 1))goto RECMDS7;//出错,重新发送rSDICSTA=0xa00;//清除命令和应答结束标志位//检查是否处于transfer modeif( rSDIRSP0 & 0x1e00!=0x800 )goto RECMDS7;//不处于transfer mode,重新发送CMD7}else//卸载该卡{RECMDD7:rSDICARG=0<<16;// CMD7参数(RCA,stuff bit),其中高16位为RCA rSDICCON=(0x1<<8)|0x47;// 无应答并,并开始发送CMD7 //检查CMD7是否成功if(!Chk_CMDend(7, 0))goto RECMDD7;//失败,重新卸载rSDICSTA=0x800;// //清除命令结束标志位}}void __irq Rd_Int(void)//读中断函数U32 i,status;status=rSDIFSTA;if((status&0x200)== 0x200 )//检查接收FIFO最后是否有数据到来{for(i=(status & 0x7f)/4;i>0;i--){*Rx_buffer++=rSDIDAT;rd_cnt++;}rSDIFSTA=rSDIFSTA&0x200;//清 Rx FIFO Last data Ready标志位}else if((status&0x80)== 0x80 )// 检查Half FULL interrupt标志,只要大于31个字节,就会将该标志置1{for(i=0;i<8;i++){*Rx_buffer++=rSDIDAT;rd_cnt++;}}ClearPending(BIT_SDI);//清零源中断挂起寄存器和中断挂起寄存器}void __irq Wt_Int(void)//写中断函数ClearPending(BIT_SDI);//清零源中断挂起寄存器和中断挂起寄存器rSDIDAT=*Tx_buffer++;wt_cnt++;if(wt_cnt==128*block){rINTMSK |= BIT_SDI;//屏蔽BIT_SDI中断rSDIDAT=*Tx_buffer;TR_end=1;}}void __irq DMA_end(void){ClearPending(BIT_DMA0);//清零源中断挂起寄存器和中断挂起寄存器TR_end=1;}void Rd_Block(void){U32 mode;int status;rd_cnt=0;Uart_Printf("Block read test[ Polling read ]\n");mode = 0 ;rSDIFSTA=rSDIFSTA|(1<<16);// 复位FIFOif(mode!=2)rSDIDCON=(2<<22)|(1<<19)|(1<<17)|(Wide<<16)|(1<<14)| (2<<12)|(block <<0);//YH 040220//设置数据控制寄存器:字传输,块数据传输,4bit数据传输,开始数据传输,数据发送模//式,共读block个块rSDICARG=0x0;// CMD17/18地址参数RERDCMD:switch(mode){case POL:if(block<2)// SINGLE_READ写单块{rSDICCON=(0x1<<9)|(0x1<<8)|0x51;//CMD17为短应答并等待应答,开始发//送CMD17单块读命令,开始读,产生RSP1if(!Chk_CMDend(17, 1))//-- Check end of CMD17goto RERDCMD;//失败,继续发送}else// MULTI_READ,读多块{rSDICCON=(0x1<<9)|(0x1<<8)|0x52;//CMD18为短应答并等待应答,开始发//送CMD18多块读命令,开始读,产生RSP1 if(!Chk_CMDend(18, 1))//-- Check end of CMD18goto RERDCMD;//失败,继续发送}rSDICSTA=0xa00;// 清命令和应答结束标志while(rd_cnt<128*block)// 512块个字节{if((rSDIDSTA&0x20)==0x20)// 是否超时{rSDIDSTA=(0x1<<0x5);// 清超时标志位break;}status=rSDIFSTA;if((status&0x1000)==0x1000)// FIFO非空{*Rx_buffer++=rSDIDAT;rd_cnt++;}}break;case INT:pISR_SDI=(unsigned)Rd_Int;rINTMSK =~(BIT_SDI);//屏蔽除所有其他中断rSDIIMSK=5;// 开启Last & Rx FIFO half 中断.if(block<2)// SINGLE_READ{rSDICCON=(0x1<<9)|(0x1<<8)|0x51;//CMD17为短应答并等待应答,开始发//送CMD17单块读命令,开始读,产生RSP1if(!Chk_CMDend(17, 1))//-- Check end of CMD17goto RERDCMD;//失败,继续发送}else// MULTI_READ{rSDICCON=(0x1<<9)|(0x1<<8)|0x52;//CMD18为短应答并等待应答,开始发//送CMD18多块读命令,开始读,产生RSP1 if(!Chk_CMDend(18, 1))//-- Check end of CMD18goto RERDCMD;//失败,继续发送}rSDICSTA=0xa00;// 清命令和应答结束标志while(rd_cnt<128*block);rINTMSK |=(BIT_SDI);//屏蔽BIT_SDI中断rSDIIMSK=0;//屏蔽所有中断break;case DMA:pISR_DMA0=(unsigned)DMA_end;rINTMSK =~(BIT_DMA0);rSDIDCON=rSDIDCON|(1<<24);//YH 040227, Burst4 Enable rDISRC0=(int)(SDIDAT);// SDIDATrDISRCC0=(1<<1)+(1<<0);// APB, fixrDIDST0=(U32)(Rx_buffer);// Rx_bufferrDIDSTC0=(0<<1)+(0<<0);// AHB, incrDCON0=(1<<31)+(0<<30)+(1<<29)+(0<<28)+(0<<27)+( 2<<24)+(1<<23) +(1<<22)+(2<<20)+128*block;rDMASKTRIG0=(0<<2)+(1<<1)+0;//no-stop, DMA2 channel on, no-swtriggerrSDIDCON=(2<<22)|(1<<19)|(1<<17)|(Wide<<16)|(1<<15)| (1<<14)|(2 <<12)|(block<<0);if(block<2)// SINGLE_READ{rSDICCON=(0x1<<9)|(0x1<<8)|0x51;// sht_resp, wait_resp, dat, start, CMD17if(!Chk_CMDend(17, 1))//-- Check end of CMD17goto RERDCMD;}else// MULTI_READ{rSDICCON=(0x1<<9)|(0x1<<8)|0x52;// sht_resp, wait_resp, dat, start, CMD18if(!Chk_CMDend(18, 1))//-- Check end of CMD18goto RERDCMD;}rSDICSTA=0xa00;// Clear cmd_end(with rsp)while(!TR_end);//Uart_Printf("rSDIFSTA=0x%x\n",rSDIFSTA);rINTMSK |=(BIT_DMA0);TR_end=0;rDMASKTRIG0=(1<<2);//DMA0 stopbreak;default:break;}//-- Check end of DATAif(!Chk_DATend())Uart_Printf("dat error\n");rSDIDCON=rSDIDCON&~(7<<12);rSDIFSTA=rSDIFSTA&0x200;//Clear Rx FIFO Last data Ready, YH 040221 rSDIDSTA=0x10;// Clear data Tx/Rx end detectif(block>1){RERCMD12://--Stop cmd(CMD12)rSDICARG=0x0;//CMD12(stuff bit)rSDICCON=(0x1<<9)|(0x1<<8)|0x4c;//sht_resp, wait_resp, start, CMD12 //-- Check end of CMD12if(!Chk_CMDend(12, 1))。
SD卡的结构原理和基本读写操作方式
SD卡的结构原理和基本读写操作方式摘要:本文首先介绍了SD Memory Card ( Secure D ig ita l MemoryCard)的基本结构和原理,着重对SD 卡的命令字和操作流程进行介绍。
接着研究了三星32位嵌入式处理器S3C2410与SD 卡硬件接口电路及其对SD卡的基本读写操作方式。
1 引言SD卡( Secure DigitalMemory Card)是一种基于Flash的新一代存储器,它着重数据存储的安全、容量和性能,是许多便携式电子产品如数码相机、手提电话, PDA 等理想的外部存储介质。
2 SD的基本概念2. 1 SD的通信协议SD卡系统可以在两种通信协议下工作: SD协议和SP I协议。
用户可以在硬件初始化时自由选择SD卡系统的通信协议。
对于特定的硬件电路,用户只需使用一种通信协议即可。
本文根据笔者的硬件,仅讨论最常用的SD协议。
2. 2 SD数据传输方式SD支持两种数据传输方式: 1 - bit方式(标准总线)和4- bit方式(宽总线)。
在1 - bit方式下,数据仅仅在数据线0(DAT[ 0 ])上传输。
在4 - bit方式下,数据在4 根数据线(DAT[ 3: 0 ])上同时传输。
在4 - bit数据传输方式下,最高的数据传输速率可达100Mb / sec。
表1列出了在两种方式下SD接口信号的定义。
上电后,缺省状态下系统工作于1 - bit方式。
在SD卡处于传输状态时,用户可以自由地更改为1 - bit或4 - bit方式。
2. 3 SD 通信原理SD总线是一个星型的总线结构,系统中允许有一个主控器,最多可达十个从设备( SD卡)。
在系统初始化时,主控器分别为每一个设备分配一个设备地址,此后主控器就可以根据此设备地址独立操作该设备。
SD总线通信是基于命令和数据位流的,每一个数据流都包括一个起始位和一个结束位。
每一个SD命令表征一个卡操作的开始。
SD命令由命令线(CMD)进行传输。
SD卡读写操作详细说明
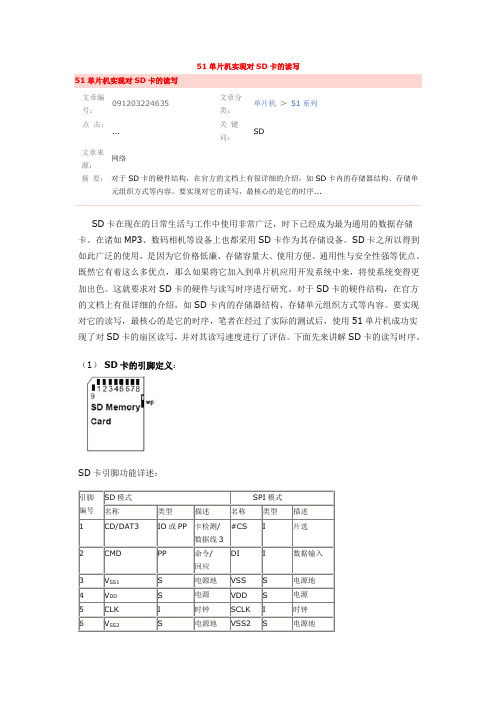
51单片机实现对SD卡的读写SD卡SPI模式下与单片机的连接图:22.23.//获得16位的回应24. Read_Byte_SD(); //read the first byte,ignore it.25.do26. { //读取后8位27. tmp = Read_Byte_SD();28. retry++;29. }30.while((tmp==0xff)&&(retry<100));31.return(tmp);32.}2)初始化SD卡的初始化是非常重要的,只有进行了正确的初始化,才能进行后面的各项操作。
在初始化过程中,SPI的时钟不能太快,否则会造初始化失败。
在初始化成功后,应尽量提高SPI的速率。
在刚开始要先发送至少74个时钟信号,这是必须的。
在很多读者的实验中,很多是因为疏忽了这一点,而使初始化不成功。
随后就是写入两个命令CMD0与CMD1,使SD卡进入SPI模式初始化时序图:初始化例程:1.//--------------------------------------------------------------------------2.初始化SD卡到SPI模式3.//--------------------------------------------------------------------------4.unsigned char SD_Init()5.{6.unsigned char retry,temp;7.unsigned char i;8.unsigned char CMD[] = {0x40,0x00,0x00,0x00,0x00,0x95};9. SD_Port_Init(); //初始化驱动端口10.11. Init_Flag=1; //将初始化标志置112.13.for (i=0;i<0x0f;i++)14. {15. Write_Byte_SD(0xff); //发送至少74个时钟信号16. }17.18.//向SD卡发送CMD019. retry=0;20.do21. { //为了能够成功写入CMD0,在这里写200次22. temp=Write_Command_SD(CMD);23. retry++;24.if(retry==200)25. { //超过200次26.return(INIT_CMD0_ERROR);//CMD0 Error!27. }28. }29.while(temp!=1); //回应01h,停止写入30.31.//发送CMD1到SD卡32. CMD[0] = 0x41; //CMD133. CMD[5] = 0xFF;34. retry=0;35.do36. { //为了能成功写入CMD1,写100次37. temp=Write_Command_SD(CMD);38. retry++;39.if(retry==100)40. { //超过100次41.return(INIT_CMD1_ERROR);//CMD1 Error!4.unsigned char Read_CSD_SD(unsigned char *Buffer)5.{6.//读取CSD寄存器的命令7.unsigned char CMD[] = {0x49,0x00,0x00,0x00,0x00,0xFF};8.unsigned char temp;9. temp=SD_Read_Block(CMD,Buffer,16); //read 16 bytes10.return(temp);11.}4)读取SD卡信息综合上面对CID与CSD寄存器的读取,可以知道很多关于SD卡的信息,以下程序可以获取这些信息。
sd卡模块读写
#include <reg51.h>//============================================================================= =================================//SD卡驱动程序//============================================================================= ==================================//定义SD卡需要的4根信号线sbit SD_OUT = P2^2;sbit SD_SCK = P2^3;sbit SD_DIN = P2^1;sbit SD_CS = P2^0;#define uchar unsigned char#define uint unsigned int//===========================================================//定义256字节缓冲区,注意需要使用xdata关键字unsigned char xdata BUFFER[512];code uchar BUFFER1[512]={0x1C,0x0a,0x0c,0x0d,0x04,0x05,0x06,0x07,0x08,0x09,0x10,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, };//===========================================================/*写一字节到SD卡,模拟SPI总线方式*/void SdWrite(uchar DATA){uchar i;for(i=0;i<8;i++){DATA<<=1;SD_SCK=0;SD_DIN=CY;SD_SCK=1;}SD_DIN=1;}//===========================================================/*从SD卡读一字节,模拟SPI总线方式*/unsigned char SdRead(){uchar DATA,i;SD_OUT=1;for(i=0;i<8;i++){DATA<<=1;SD_SCK=0;SD_SCK=1;DATA|=SD_OUT;}return DATA;}//============================================================/*检测SD卡的响应*/unsigned char SdResponse(){unsigned char i=0,response;while(i<=8){response = SdRead();if(response==0x00)break;if(response==0x01)break;i++;}return response;}//================================================================/*发命令到SD卡,SD的一个命令由6个字节组成,关于SD的命令介绍,请看本文件的PDF 的介绍command:第一字节:命令号;argument:第2-5字节;CRC:第6字节校验位;*/void SdCommand(unsigned char command, unsigned long argument, unsigned char CRC) //unsigned long :32位的变量,包含SD的第2-5字节{SdWrite(command|0x40);//发送命令号SdWrite(((unsigned char *)&argument)[0]);//发送第2字节SdWrite(((unsigned char *)&argument)[1]);//发送第3字节SdWrite(((unsigned char *)&argument)[2]);//发送第4字节SdWrite(((unsigned char *)&argument)[3]);//发送第5字节SdWrite(CRC); //发送CRC}//================================================================/*初始化SD卡*/unsigned char SdInit(void){int delay=0, trials=0;unsigned char i;unsigned char response=0x01;SD_CS=1;//上点完成后,先对SD卡发送74个以上的同步时钟!!这是必须的for(i=0;i<=9;i++)SdWrite(0xff);SD_CS=0;//发送CMD0命令:对SD进行复位操作SdCommand(0x00,0,0x95);//每发一次命令那个,都会对应着一个响应response=SdResponse();//CMD0对应的响应为0x01if(response!=0x01){return 0;}//SD卡默认的读写方式为SD模式,所以当SD复位完成后,要使SD进入SPI模式while(response==0x01){SD_CS=1;SdWrite(0xff);SD_CS=0;//发送CMD1指令,使SD卡进入SPI模式SdCommand(0x01,0x00ffc000,0xff);response=SdResponse();}//CS线拉高,在发送8个空时钟SD_CS=1;SdWrite(0xff);return 1;}//================================================================/*往SD卡指定地址写数据,一次最多512字节*/unsigned char SdWriteBlock(unsigned char *Block, unsigned long address,int len){unsigned int count;unsigned char response;//Block size is 512 bytes exactly//First Lower SSSD_CS=0;//发送写命令;CMD18:块写入命令;address:为写入的地址,必须是512的倍倍数SdCommand(0x18,address,0xff);//改命令对应的应答位0x00if(SdResponse()==00){//发送若干个空操作SdWrite(0xff);SdWrite(0xff);SdWrite(0xff);//写0xfe数据头,表示接下来要发送字节块SdWrite(0xfe);//开始输入数据for(count=0;count<len;count++) SdWrite(*Block++);/*检测语句,当len<512个字节时,用0去代替剩下的数,因为一次写入的字节长度必须是512的倍数*/for(;count<512;count++) SdWrite(0);/*两字节CRC校验, 为0XFFFF 表示不考虑CRC,SD在SPI模式下是不需要考虑CRC校验码的,但也可以发送0xff来代替*/ SdWrite(0xff);SdWrite(0xff);//读取校验码,此时对应的响应为xxx00101response=SdRead();while(SdRead()==0);//等待卡数据发送回应/*因为响应命令为xxx00101,它的最高三位是不能确定的所以让它与0x0f"与"一下,那么它的高三位就变为0了*/response=response&0x0f;SD_CS=1;SdWrite(0xff);if(response==0x0b)//判断是否为正确的响应{return 0;}if(response==0x05)return 1;///return 0;}return 0;}//======================================================================= /*从SD卡指定地址读取数据,一次最多512字节*/unsigned char SdReadBlock(unsigned char *Block, unsigned long address,int len){unsigned int count;SD_CS=0;//CMD11:数据块读命令,add:为要读块的地址SdCommand(0x11,address,0xff);if(SdResponse()==00){//0xfe:为块读出的头,由SD发送;后面紧跟512字节的块数据+2字节的CRC码while(SdRead()!=0xfe);for(count=0;count<len;count++)if(count<256)*Block++=SdRead();elseSdRead();for(;count<512;count++) SdRead();//发送空时钟SdRead();SdRead();//SD_CS拉高SD_CS=1;SdRead();return 1;}return 0;}//======================================================================= /*串口初始化*/void init(){/*波特率为9600;使用的晶振为:11.0592;*/TMOD=0X20;TH1=0XFD;TL1=0XFD;TR1=1;SCON=0X50;EA=1;ES=1;}//======================================================================= /*主函数*/void main(){unsigned char i;/*串口,SD卡的初始化*/init();SdInit();/*讲BUFFER1[512]数组的内容发送给SD卡,保存地址为512;注意地址最后不要太大,取决与SD本身;在读取SD卡的512地址的内容保存在BUFFER[]数组中*/ SdWriteBlock(BUFFER1,512,512);SdReadBlock(BUFFER,512,512);/*让串口发送BUFFER[]的内容,来检测数据是否成功写入SD卡内*/for(i=0;i<7;i++){SBUF=BUFFER[i];while(!TI);TI=0;}while(1);}。
SD卡读写的方式(用SD模式)
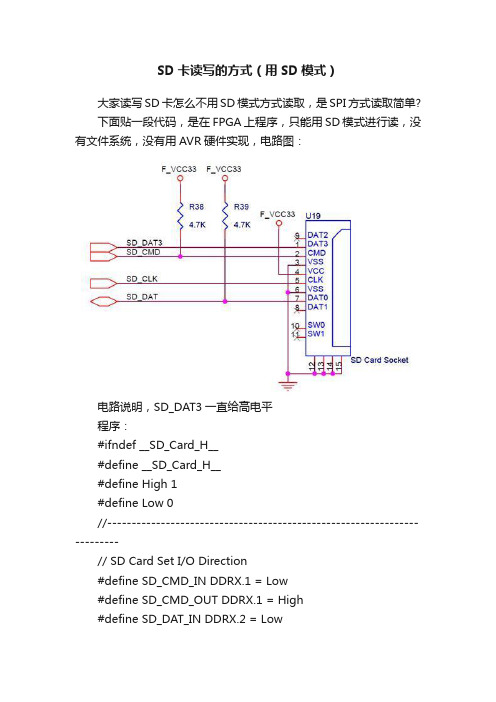
SD卡读写的方式(用SD模式)大家读写SD卡怎么不用SD模式方式读取,是SPI方式读取简单?下面贴一段代码,是在FPGA上程序,只能用SD模式进行读,没有文件系统,没有用AVR硬件实现,电路图:电路说明,SD_DAT3一直给高电平程序:#ifndef __SD_Card_H__#define __SD_Card_H__#define High 1#define Low 0//-------------------------------------------------------------------------// SD Card Set I/O Direction#define SD_CMD_IN DDRX.1 = Low#define SD_CMD_OUT DDRX.1 = High#define SD_DAT_IN DDRX.2 = Low#define SD_DAT_OUT DDRX.2 = High#define SD_CLK_OUT DDRX.3 = High#define SD_DAT3_OUT DDRX.0 = High// SD Card Output High/Low#define SD_CMD_LOW PORTX.1 = Low#define SD_CMD_HIGH PORTX.1 = High#define SD_DAT_LOW PORTX.2 = Low#define SD_DAT_HIGH PORTX.2 = High#define SD_CLK_LOW PORTX.3 = Low#define SD_CLK_HIGH PORTX.3 = High#define SD_DAT3_HIGH PORTX.0 = High// SD Card Input Read#define SD_TEST_CMD PINX.1#define SD_TEST_DAT PINX.2//------------------------------------------------------------------------- #define BYTE unsigned char#define UINT16 unsigned int#define UINT32 unsigned long//------------------------------------------------------------------------- void Ncr(void);void Ncc(void);BYTE response_R(BYTE);BYTE send_cmd(BYTE *);BYTE SD_read_lba(BYTE *,UINT32,UINT32);BYTE SD_card_init(void);//------------------------------------------------------------------------- BYTE read_status;BYTE response_buffer[20];BYTE RCA[2];BYTE cmd_buffer[5];const BYTE cmd0[5] = {0x40,0x00,0x00,0x00,0x00};const BYTE cmd55[5] = {0x77,0x00,0x00,0x00,0x00};const BYTE cmd2[5] = {0x42,0x00,0x00,0x00,0x00};const BYTE cmd3[5] = {0x43,0x00,0x00,0x00,0x00};const BYTE cmd7[5] = {0x47,0x00,0x00,0x00,0x00};const BYTE cmd9[5] = {0x49,0x00,0x00,0x00,0x00};const BYTE cmd16[5] = {0x50,0x00,0x00,0x02,0x00};const BYTE cmd17[5] = {0x51,0x00,0x00,0x00,0x00};const BYTE acmd6[5] = {0x46,0x00,0x00,0x00,0x02};const BYTE acmd41[5] = {0x69,0x0f,0xf0,0x00,0x00};const BYTE acmd51[5] = {0x73,0x00,0x00,0x00,0x00};//------------------------------------------------------------------------- void Ncr(void){SD_CMD_IN;SD_CLK_LOW;SD_CLK_HIGH;SD_CLK_LOW;SD_CLK_HIGH;}//------------------------------------------------------------------------- void Ncc(void){int i;for(i=0;i<8;i++){SD_CLK_LOW;SD_CLK_HIGH;}}//------------------------------------------------------------------------- BYTE SD_card_init(void){BYTE x,y;SD_CMD_OUT;SD_DAT_IN;SD_CLK_HIGH;SD_CMD_HIGH;SD_DAT_LOW;read_status=0;for(x=0;x<40;x++)Ncr();for(x=0;x<5;x++)cmd_buffer[x]=cmd0[x];y = send_cmd(cmd_buffer);do{for(x=0;x<40;x++);Ncc();for(x=0;x<5;x++)cmd_buffer[x]=cmd55[x];y = send_cmd(cmd_buffer);Ncr();if(response_R(1)>1) //response too long or crc errorreturn 1;Ncc();for(x=0;x<5;x++)cmd_buffer[x]=acmd41[x];y = send_cmd(cmd_buffer);Ncr();} while(response_R(3)==1); Ncc();for(x=0;x<5;x++)cmd_buffer[x]=cmd2[x];y = send_cmd(cmd_buffer); Ncr();if(response_R(2)>1) return 1;Ncc();for(x=0;x<5;x++)cmd_buffer[x]=cmd3[x];y = send_cmd(cmd_buffer); Ncr();if(response_R(6)>1) return 1;RCA[0]=response_buffer[1]; RCA[1]=response_buffer[2]; Ncc();for(x=0;x<5;x++)cmd_buffer[x]=cmd9[x]; cmd_buffer[1] = RCA[0]; cmd_buffer[2] = RCA[1];y = send_cmd(cmd_buffer); Ncr();if(response_R(2)>1) return 1;Ncc();for(x=0;x<5;x++)cmd_buffer[x]=cmd7[x]; cmd_buffer[1] = RCA[0];cmd_buffer[2] = RCA[1];y = send_cmd(cmd_buffer);Ncr();if(response_R(1)>1)return 1;Ncc();for(x=0;x<5;x++)cmd_buffer[x]=cmd16[x];y = send_cmd(cmd_buffer);Ncr();if(response_R(1)>1)return 1;read_status =1; //sd card readyreturn 0;}//------------------------------------------------------------------------- BYTE SD_read_lba(BYTE *buff,UINT32 lba,UINT32 seccnt) {BYTE c=0;UINT32 i,j;lba+=101;for(j=0;j<seccnt;j++)< p="">{{Ncc();cmd_buffer[0] = cmd17[0];cmd_buffer[1] = (lba>>15)&0xff; cmd_buffer[2] = (lba>>7)&0xff; cmd_buffer[3] = (lba<<1)&0xff; cmd_buffer[4] = 0;lba++;send_cmd(cmd_buffer); Ncr();}while(1){SD_CLK_LOW;SD_CLK_HIGH;if(!(SD_TEST_DAT)) break;}for(i=0;i<512;i++) {BYTE k;for(k=0;k<8;k++){SD_CLK_LOW;SD_CLK_HIGH;c <<= 1;if(SD_TEST_DAT)c |= 0x01;}*buff=c;buff++;}for(i=0; i<16; i++) {SD_CLK_LOW;SD_CLK_HIGH;}}read_status = 1; //SD data next inreturn 0;}//------------------------------------------------------------------------- BYTE response_R(BYTE s){BYTE a=0,b=0,c=0,r=0,crc=0;BYTE i,j=6,k;while(1){SD_CLK_LOW;SD_CLK_HIGH;if(!(SD_TEST_CMD))break;if(crc++ >100)return 2;}crc =0;if(s == 2)j = 17;for(k=0; k<="" p="">{c = 0;if(k > 0) //for crc culcarb = response_buffer[k-1];for(i=0; i<8; i++){SD_CLK_LOW;if(a > 0)c <<= 1;elsei++;a++;SD_CLK_HIGH;if(SD_TEST_CMD)c |= 0x01;if(k > 0){crc <<= 1;if((crc ^ b) & 0x80)crc ^= 0x09;b <<= 1;crc &= 0x7f;}}if(s==3){if( k==1 &&(!(c&0x80)))r=1;}response_buffer[k] = c;}if(s==1 || s==6){if(c != ((crc<<1)+1))r=2;}return r;}//------------------------------------------------------------------------- BYTE send_cmd(BYTE *in) {int i,j;BYTE b,crc=0;SD_CMD_OUT;for(i=0; i < 5; i++){b = in[i];for(j=0; j<8; j++){SD_CLK_LOW;if(b&0x80)SD_CMD_HIGH;elseSD_CMD_LOW;crc <<= 1;SD_CLK_HIGH;if((crc ^ b) & 0x80)crc ^= 0x09;b<<=1;}crc &= 0x7f;}crc =((crc<<1)|0x01);b = crc;for(j=0; j<8; j++){SD_CLK_LOW;if(crc&0x80)SD_CMD_HIGH;elseSD_CMD_LOW;SD_CLK_HIGH;crc<<=1;}return b;}//-------------------------------------------------------------------------#endif这些程序有些我也不明白,贴出来希望大家一起探讨交流,打破网站SD卡用SPI方式读写的垄断局面,哈哈sd模式下应该有4各data吧,怎么你的只用一个?SPI模式是1Bit的SD模式是1Bit或4BitSD卡确实也像USB一样分为全速(FULL-SPEED)卡和低速卡(LOW-SPEED)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
大家读写SD卡怎么不用SD模式方式读取,是SPI方式读取简单?下面贴一段代码,是在FPGA上程序,只能用SD模式进行读,没有文件系统,没有用AVR硬件实现,电路图:电路说明,SD_DAT3一直给高电平程序:#ifndef __SD_Card_H__#define __SD_Card_H__#define High 1#define Low 0//-------------------------------------------------------------------------// SD Card Set I/O Direction#define SD_CMD_IN DDRX.1 = Low#define SD_CMD_OUT DDRX.1 = High#define SD_DAT_IN DDRX.2 = Low#define SD_DAT_OUT DDRX.2 = High#define SD_CLK_OUT DDRX.3 = High#define SD_DAT3_OUT DDRX.0 = High// SD Card Output High/Low#define SD_CMD_LOW PORTX.1 = Low#define SD_CMD_HIGH PORTX.1 = High#define SD_DAT_LOW PORTX.2 = Low#define SD_DAT_HIGH PORTX.2 = High#define SD_CLK_LOW PORTX.3 = Low#define SD_CLK_HIGH PORTX.3 = High#define SD_DAT3_HIGH PORTX.0 = High// SD Card Input Read#define SD_TEST_CMD PINX.1#define SD_TEST_DAT PINX.2//------------------------------------------------------------------------- #define BYTE unsigned char#define UINT16 unsigned int#define UINT32 unsigned long//------------------------------------------------------------------------- void Ncr(void);void Ncc(void);BYTE response_R(BYTE);BYTE send_cmd(BYTE *);BYTE SD_read_lba(BYTE *,UINT32,UINT32);BYTE SD_card_init(void);//------------------------------------------------------------------------- BYTE read_status;BYTE response_buffer[20];BYTE RCA[2];BYTE cmd_buffer[5];const BYTE cmd0[5] = {0x40,0x00,0x00,0x00,0x00};const BYTE cmd55[5] = {0x77,0x00,0x00,0x00,0x00};const BYTE cmd2[5] = {0x42,0x00,0x00,0x00,0x00};const BYTE cmd3[5] = {0x43,0x00,0x00,0x00,0x00};const BYTE cmd7[5] = {0x47,0x00,0x00,0x00,0x00};const BYTE cmd9[5] = {0x49,0x00,0x00,0x00,0x00};const BYTE cmd16[5] = {0x50,0x00,0x00,0x02,0x00};const BYTE cmd17[5] = {0x51,0x00,0x00,0x00,0x00};const BYTE acmd6[5] = {0x46,0x00,0x00,0x00,0x02};const BYTE acmd41[5] = {0x69,0x0f,0xf0,0x00,0x00};const BYTE acmd51[5] = {0x73,0x00,0x00,0x00,0x00};//------------------------------------------------------------------------- void Ncr(void){SD_CMD_IN;SD_CLK_LOW;SD_CLK_HIGH;SD_CLK_LOW;SD_CLK_HIGH;}//------------------------------------------------------------------------- void Ncc(void){int i;for(i=0;i<8;i++){SD_CLK_LOW;SD_CLK_HIGH;}}//------------------------------------------------------------------------- BYTE SD_card_init(void){BYTE x,y;SD_CMD_OUT;SD_DAT_IN;SD_CLK_HIGH;SD_CMD_HIGH;SD_DAT_LOW;read_status=0;for(x=0;x<40;x++)Ncr();for(x=0;x<5;x++)cmd_buffer[x]=cmd0[x];y = send_cmd(cmd_buffer);do{for(x=0;x<40;x++);Ncc();for(x=0;x<5;x++)cmd_buffer[x]=cmd55[x];y = send_cmd(cmd_buffer);Ncr();if(response_R(1)>1) //response too long or crc errorreturn 1;Ncc();for(x=0;x<5;x++)cmd_buffer[x]=acmd41[x];y = send_cmd(cmd_buffer);Ncr();} while(response_R(3)==1);Ncc();for(x=0;x<5;x++)cmd_buffer[x]=cmd2[x];y = send_cmd(cmd_buffer);Ncr();if(response_R(2)>1)return 1;Ncc();for(x=0;x<5;x++)cmd_buffer[x]=cmd3[x];y = send_cmd(cmd_buffer);Ncr();if(response_R(6)>1)return 1;RCA[0]=response_buffer[1];RCA[1]=response_buffer[2];Ncc();for(x=0;x<5;x++)cmd_buffer[x]=cmd9[x];cmd_buffer[1] = RCA[0];cmd_buffer[2] = RCA[1];y = send_cmd(cmd_buffer);Ncr();if(response_R(2)>1)return 1;Ncc();for(x=0;x<5;x++)cmd_buffer[x]=cmd7[x];cmd_buffer[1] = RCA[0];cmd_buffer[2] = RCA[1];y = send_cmd(cmd_buffer);Ncr();if(response_R(1)>1)return 1;Ncc();for(x=0;x<5;x++)cmd_buffer[x]=cmd16[x];y = send_cmd(cmd_buffer);Ncr();if(response_R(1)>1)return 1;read_status =1; //sd card readyreturn 0;}//------------------------------------------------------------------------- BYTE SD_read_lba(BYTE *buff,UINT32 lba,UINT32 seccnt){BYTE c=0;UINT32 i,j;lba+=101;for(j=0;j<seccnt;j++){{Ncc();cmd_buffer[0] = cmd17[0];cmd_buffer[1] = (lba>>15)&0xff; cmd_buffer[2] = (lba>>7)&0xff; cmd_buffer[3] = (lba<<1)&0xff; cmd_buffer[4] = 0;lba++;send_cmd(cmd_buffer);Ncr();}while(1){SD_CLK_LOW;SD_CLK_HIGH;if(!(SD_TEST_DAT))break;}for(i=0;i<512;i++){BYTE k;for(k=0;k<8;k++){SD_CLK_LOW;SD_CLK_HIGH;c <<= 1;if(SD_TEST_DAT)c |= 0x01;}*buff=c;buff++;}for(i=0; i<16; i++){SD_CLK_LOW;SD_CLK_HIGH;}}read_status = 1; //SD data next inreturn 0;}//------------------------------------------------------------------------- BYTE response_R(BYTE s){BYTE a=0,b=0,c=0,r=0,crc=0;BYTE i,j=6,k;while(1){SD_CLK_LOW;SD_CLK_HIGH;if(!(SD_TEST_CMD))break;if(crc++ >100)return 2;}crc =0;if(s == 2)j = 17;for(k=0; k<j; k++){c = 0;if(k > 0) //for crc culcarb = response_buffer[k-1];for(i=0; i<8; i++){SD_CLK_LOW;if(a > 0)c <<= 1;elsei++;a++;SD_CLK_HIGH;if(SD_TEST_CMD)c |= 0x01;if(k > 0){crc <<= 1;if((crc ^ b) & 0x80)crc ^= 0x09;b <<= 1;crc &= 0x7f;}}if(s==3){if( k==1 &&(!(c&0x80)))r=1;}response_buffer[k] = c;}if(s==1 || s==6){if(c != ((crc<<1)+1))r=2;}return r;}//------------------------------------------------------------------------- BYTE send_cmd(BYTE *in){int i,j;BYTE b,crc=0;SD_CMD_OUT;for(i=0; i < 5; i++){b = in[i];for(j=0; j<8; j++){SD_CLK_LOW;if(b&0x80)SD_CMD_HIGH;elseSD_CMD_LOW;crc <<= 1;SD_CLK_HIGH;if((crc ^ b) & 0x80)crc ^= 0x09;b<<=1;}crc &= 0x7f;}crc =((crc<<1)|0x01);b = crc;for(j=0; j<8; j++){SD_CLK_LOW;if(crc&0x80)SD_CMD_HIGH;elseSD_CMD_LOW;SD_CLK_HIGH;crc<<=1;}return b;}//-------------------------------------------------------------------------#endif这些程序有些我也不明白,贴出来希望大家一起探讨交流,打破网站SD卡用SPI方式读写的垄断局面,哈哈sd模式下应该有4各data吧,怎么你的只用一个?SPI模式是1Bit的SD模式是1Bit或4BitSD卡确实也像USB一样分为全速(FULL-SPEED)卡和低速卡(LOW-SPEED)。