柔性关节设计
康复机器人PVDF柔性关节设计与驱动特性研究

康复机器人PVDF柔性关节设计与驱动特性研究
谢光辉;孙红;孙凡惟;王光建
【期刊名称】《机械传动》
【年(卷),期】2024(48)5
【摘要】针对康复机器人本体柔顺性差的问题,提出了一种新型的聚偏氟乙烯(Polyvinylidene Fluoride,PVDF)凝胶基人工肌肉,将其作为康复机器人柔性关节致动器,期望实现类人动作。
介绍了PVDF凝胶制备和电致变形机制,并由此设计了具备收缩和伸张功能的单体肌肉,进而将多个单体肌肉上下串联,组合构成层级人工肌肉;基于康复机器人柔性关节3层级人工肌肉,辨识其驱动数学模型,并进行了仿真与实验。
结果表明,该人工肌肉能够有效地实现位置控制,具备电致收缩和扩张能力,作为致动器应用于柔性关节是可行的。
【总页数】5页(P164-168)
【作者】谢光辉;孙红;孙凡惟;王光建
【作者单位】重庆大学机械传动国家重点实验室;重庆电子工程职业学院智慧健康学院;新西兰奥克兰大学
【正文语种】中文
【中图分类】TP2
【相关文献】
1.下肢外骨骼机器人踝关节混合柔性驱动设计与研究
2.外骨骼型下肢康复机器人柔性关节驱动器的设计及实验研究
3.基于柔性关节的下肢康复机器人设计与分析
4.
轻量化自适应柔性踝关节康复机器人设计与评估5.柔性踝关节康复机器人设计与控制
因版权原因,仅展示原文概要,查看原文内容请购买。
柔性机器人的关节设计与制作
s i g n e d a s d e s i g n r e q u i r e me n t s f o r d e t e r mi n i n g g e o me t r i c p a r a me t e r s o f j o i n t s .T h e j o i n t s ma d e o f 6 5 Mn s p r i n g s t e e l a r e a s s e mb l e d
D e s i g n a n d ma n u f a c t u r e o f l f e x re u r o b o t j o i n t s
Yu Yu e q i n g ,Ma L a n,Cu i Z h o n g we i ,I m Qi a n g
第 8卷
第 8期
中 国 科 技 论ቤተ መጻሕፍቲ ባይዱ文
CH I NA S CI E NCEP AP ER
Vo 1 . 8 No . 8 Au g .2 0 1 3
2 0 1 3年 8月
柔 性 机 器 人 的 关 节 设 计 与 制 作
佘跃庆 , 马 兰 , 崔 忠 炜 ,吕 强
( 北 京 工 业 大学 机 电 学院 , 北京 1 0 0 1 2 4 )
摘 要: 本 文设计 了一种 应用 于并联机器人上 的新型开槽 式薄壁柔 性关节。 以并联 机器人运 动过 程 中关 节所需 的最大扭 转 刚 度 以及运动产 生的关节最大扭转角度作为设计条件 , 对关节结构进行设计计算 , 确定 关节几何 尺寸。然后根据设 计尺寸及使 用 条件 , 选择弹性较大并且便 于加 工的弹簧钢 6 5 Mn为材 料进行加 工制作 , 并将实 物安装在并联机器 人上。该关 节利用扭 转变形 作 为 主 要 变形 方 式 , 具 有 扭 转 角度 大和 轴 线 相对 固定 不 易 漂移 的优 点 。 关键词 : 机器人 ; 柔性结构 ; 关节; 设计 ; 制造 中图分类号 : THl l 2 ; T P 2 4 2 文献标志码 : A 文章编号 : 2 0 9 5 —2 7 8 3 ( 2 0 1 3 ) 0 8 —0 7 8 4~ 0 3
面向软体节肢机器人的柔性关节驱动器设计及特性分析

精品文档供您编辑修改使用专业品质权威编制人:______________审核人:______________审批人:______________编制单位:____________编制时间:____________序言下载提示:该文档是本团队精心编制而成,希望大家下载或复制使用后,能够解决实际问题。
文档全文可编辑,以便您下载后可定制修改,请根据实际需要进行调整和使用,谢谢!同时,本团队为大家提供各种类型的经典资料,如办公资料、职场资料、生活资料、学习资料、课堂资料、阅读资料、知识资料、党建资料、教育资料、其他资料等等,想学习、参考、使用不同格式和写法的资料,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!And, this store provides various types of classic materials for everyone, such as office materials, workplace materials, lifestylematerials, learning materials, classroom materials, reading materials, knowledge materials, party building materials, educational materials, other materials, etc. If you want to learn about different data formats and writing methods, please pay attention!面对软体节肢机器人的柔性关节驱动器设计及特性分析摘要:本文旨在开发一种适用于软体节肢机器人的柔性关节驱动器,以实现更好的控制和运动灵活性。
北京理工大学科技成果——一体化柔性关节及仿人柔性机械臂

北京理工大学科技成果——一体化柔性关节及仿人柔性机械臂成果简介本项目研制的柔性一体化关节采用机电一体的模块化设计,具有高力矩稳定输出(输出力矩70Nm),高集成化(机构、驱动电路和通信模块集成于关节之中)、互换性好(肩、肘关节可直接替换)、可靠性高等特点,适合于大规模生产,可以降低机械臂成本,具有极大的市场推广价值。
关节内部含有弹性环节,存在内在柔性,当与环境或人接触时,可以保证人不受伤害以及机械臂自身的安全性。
同时,可以测量关节的输出力矩,获得比传统关节更好的力控制精度与稳定性。
本项目在柔性一体化关节的基础上研制了仿人柔性机械臂,该机械臂采用仿人类手臂的构型的结构设计,具有4个自由度(肩部3个,肘部1个),其长度与人类手臂长度相仿。
通过阻抗控制技术可以使机械臂模拟出人类手臂可“柔”可“刚”的肌肉特性,从而使机械臂可以在非结构化环境中,安全地与环境和人类进行交互。
该机械臂适于作为与人类接触使用的专用设备或者应用于服务型机器人和空间机器人领域。
目前,项目组已将该机械臂应用于按摩治疗领域,并搭建出腰痛中医点按机器人平台。
腰痛中医点按机器人可以逼真地模拟出医师完成点按揉、指揉、弹拨和推法4种按摩手法,假体实验和临床实验结果表明机器人与医师的按摩治疗效果相仿。
项目来源国家自然基金技术领域信息技术应用范围服务型机器人现状特点国内领先、国际先进柔性一体化关节技术创新研制了具有内在柔性和力矩测量的一体化关节,可以通过该关节快速地搭建出仿人机械臂,使机械臂在完成作业的同时可以在非结构化环境中安全地与人类和环境进行交互,为机器人与人类和谐相处提供了新的解决方案。
仿人柔性机械臂所在阶段原理样机成果知识产权申请发明专利4项成果转让方式合作开发/技术转让基于仿人柔性臂的按摩机器人平台市场状况服务型机器人以及可使用在非结构化环境中的机器人是现在机器人研究的热点,也是社会关注的焦点。
传统的刚性工业机器人构建传感器壁垒,采用柔顺控制算法实现对环境的柔顺性。
主动柔顺膝关节助力机构设计
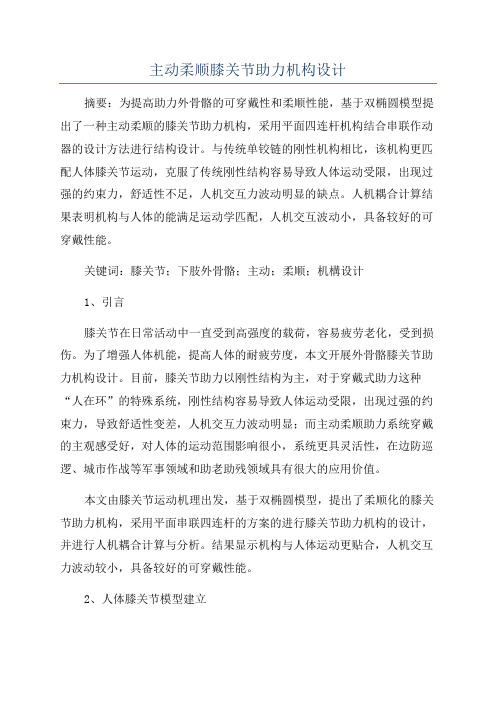
主动柔顺膝关节助力机构设计摘要:为提高助力外骨骼的可穿戴性和柔顺性能,基于双椭圆模型提出了一种主动柔顺的膝关节助力机构,采用平面四连杆机构结合串联作动器的设计方法进行结构设计。
与传统单铰链的刚性机构相比,该机构更匹配人体膝关节运动,克服了传统刚性结构容易导致人体运动受限,出现过强的约束力,舒适性不足,人机交互力波动明显的缺点。
人机耦合计算结果表明机构与人体的能满足运动学匹配,人机交互波动小,具备较好的可穿戴性能。
关键词:膝关节;下肢外骨骼;主动;柔顺;机構设计1、引言膝关节在日常活动中一直受到高强度的载荷,容易疲劳老化,受到损伤。
为了增强人体机能,提高人体的耐疲劳度,本文开展外骨骼膝关节助力机构设计。
目前,膝关节助力以刚性结构为主,对于穿戴式助力这种“人在环”的特殊系统,刚性结构容易导致人体运动受限,出现过强的约束力,导致舒适性变差,人机交互力波动明显;而主动柔顺助力系统穿戴的主观感受好,对人体的运动范围影响很小,系统更具灵活性,在边防巡逻、城市作战等军事领域和助老助残领域具有很大的应用价值。
本文由膝关节运动机理出发,基于双椭圆模型,提出了柔顺化的膝关节助力机构,采用平面串联四连杆的方案的进行膝关节助力机构的设计,并进行人机耦合计算与分析。
结果显示机构与人体运动更贴合,人机交互力波动较小,具备较好的可穿戴性能。
2、人体膝关节模型建立人体膝关节运动模型是机构设计的重要依据。
真实人体膝关节十分复杂,由小腿胫骨、大腿胫骨、韧带、肌肉等组成,胫骨之间的接触面并不规则,所以在膝关节屈伸时接触面之间并不是纯滚动,而是滚动中还夹杂着滑动。
单铰链约束会导致膝关节实际运动轨迹不够贴合,会影响穿戴者的舒适度,还可能引起一定的运动干涉,甚至损伤人体。
因此,为获取更符合人体膝关节实际运动的模型,对膝关节运动模型的研究很有必要。
近年来许多学者在研究利用简化模型来描述膝关节在矢状面的运动,应用比较广泛的3个模型,有双圆心模型,双椭圆模型,速度瞬心模型[1]。
外摆线轮廓柔性关节的设计与分析
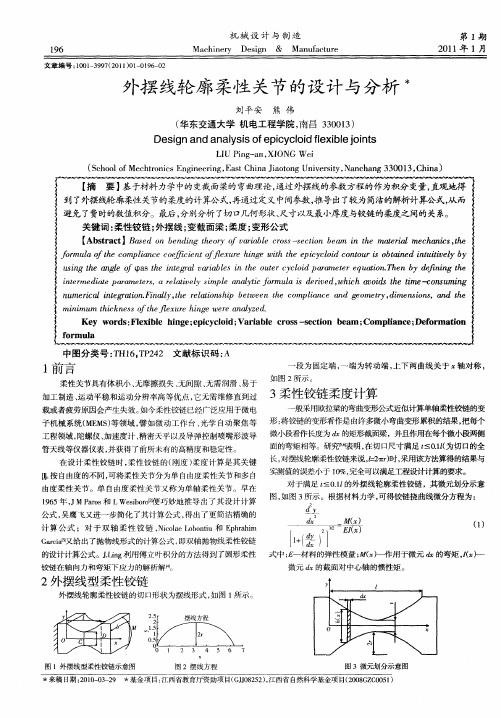
如图 2 示。 所
3 柔性铰链柔度计算
一
般采用欧拉梁的弯曲变形公式近似计算单轴柔性铰链的变
将铰链的变形看作是 由许多微小弯曲变形 累积的结果 , 把每个 子机械 系统 ( M ) ME S 等领域 , 譬如微动工作 台 、 光学 自动聚焦等 形 : 微小段看作长度为 的矩形截面梁 ,并且作用在每个微,巨两侧 J殳 \ 工程领域 , 陀螺仪 、 加速度计 、 精密天平以及导弹控制喷嘴形 波导 管天线等仪器仪表 , 并获得了前所未有 的高精度和稳定性 。
【 摘
要 】 于材料力 学中的变截 面梁的弯曲理论 , 夕摆线 的参数方程 的作为积分变量 , 地 基 通过 卜 直观.得
到了 外摆线轮廓柔性关节的柔度的计算公式, 再通过定义中间参数, 推导出了 较为简洁的解析计算公式, 从而 避免 了费时的数值积分。最后 , 分别分析 了切 口几何形状、 尺寸以及 最小厚度与铰链的柔度之间的关系。 关键词 : 柔性铰链 .卜 线 ; 夕摆 变截面 梁 ; 柔度 ; 变形公 式 【 bt c】 a do edn er o r b R Ssco e em t i ehn st A s at B s nbn i t o v i l C S-etnba i t a r l cai , e r e g h y f aa e O i m nh ea m c h
n me ii b t e h o u rc i tg to . n y,h ea o s p e we n t e c mpla e n d g o ty, i n in ,a d t e l r l t inc a e me r d me s o s n h
MRB-PAM 康复柔性关节设计与分析
价值工程0引言随着时代的进步和科学技术的不断进步,人们的身体健康问题越来越受到重视,尤其是在人体瘫痪的辅助治疗上。
在后期自主康复的过程中,为了降低医疗患者家庭的生活费用,进而减轻治疗带来的心理压力,减少大量公共医疗资源的消耗,辅助人体的康复机器人应运而生。
康复机器人是工业机器人和医用机器人的结合[1]。
因此,目前康复机器人的驱动手段主要以电机等,控制机器人带动人体做运动。
但当机器人应用于人体时,电机驱动人体,使得施加力和刚强度过大,对患者身体造成二次损伤。
这样就产生了柔软的关节,广泛应用于医疗、制造、救援等领域。
例如外骨骼机器人、柔性机械臂和足式机器人等机器人[2,3]。
近几年国内越来越多的院校和科研机构对康复设备(柔性关节机器人)进行了研究,并取得了一系列的研究成果。
国内外众多学者基于气动肌肉群拮抗驱动装置设计了一种3自由度球关节结构机器人[4,5];设计了一种捆扎交错式气动人工肌肉执行器[6],以此来提高工作效率;在“cheetah ”机器人系统中[7],使用拮抗式气动人工肌肉关节结构。
也将拮抗式或单/多根气动人工肌肉与改进的多种机构进行结合,设计出了许多新型的柔性关节,包括采用滑轮结构将弹性元件与驱动元件分开布置的气动人工肌肉驱动串联弹性关节[8]、通过利用一组平行的气动人工肌肉束拉动滑板-连杆机构产生旋转运动的PAM-actuated 重载机械臂[9]、两根气动人工肌肉和两根弹簧并联的四杆关节机构[10,11]等等。
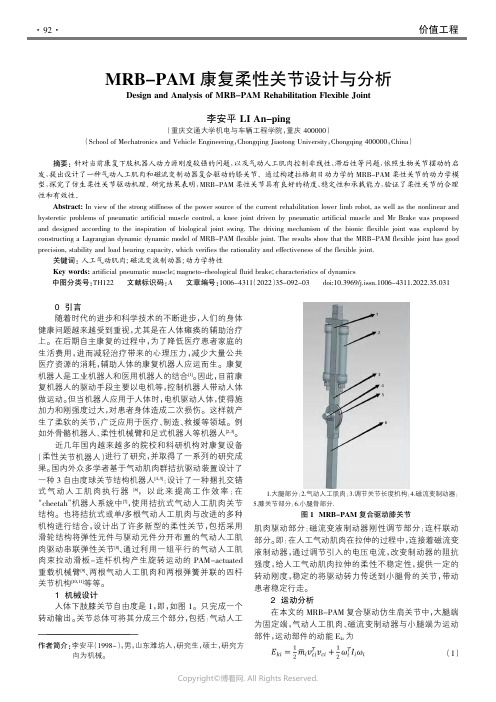
1机械设计人体下肢膝关节自由度是1,即,如图1。
只完成一个转动输出。
关节总体可将其分成三个部分,包括:气动人工肌肉驱动部分;磁流变液制动器刚性调节部分;连杆联动部分。
即:在人工气动肌肉在拉伸的过程中,连接着磁流变液制动器,通过调节引入的电压电流,改变制动器的阻抗强度,给人工气动肌肉拉伸的柔性不稳定性,提供一定的转动刚度,稳定的将驱动转力传送到小腿骨的关节,带动患者稳定行走。
2运动分析在本文的MRB-PAM 复合驱动仿生肩关节中,大腿端为固定端,气动人工肌肉、磁流变制动器与小腿端为运动部件,运动部件的动能E ki 为(1)———————————————————————作者简介:李安平(1998-),男,山东潍坊人,研究生,硕士,研究方向为机械。
柔性机器人的机构设计和控制研究
柔性机器人的机构设计和控制研究柔性机器人是指具有柔性结构和柔性传动机构的机械臂,它具有较高的柔性、轻巧和可变形的特点,能够在不同环境中执行精确灵活的任务。
柔性机器人的机构设计和控制是该领域的重要研究方向,本文将探讨柔性机器人的机构设计和控制方面的研究进展。
柔性机器人的机构设计是柔性机器人研究领域的关键问题之一、机构设计的目标是实现柔性臂的精确运动和优化力传递。
柔性机器人的机构设计方法主要包括柔性关节机构设计和柔性链条设计。
柔性关节机构设计是指设计柔性关节以实现机械臂的自由度和运动范围。
柔性关节可以采用弯曲或扭转等柔性材料,如弯曲杆、扭转杆或软体材料。
柔性关节的设计需要考虑材料的柔性和强度,以及与其他关节的协同运动。
柔性链条设计是指设计柔性的连接杆件以实现机械臂的连续曲线运动。
柔性链条可以采用连杆组件和柔性衔接件,通过特定的结构设计实现连杆的柔性运动。
机构设计的关键问题是如何设计合适的结构和材料,以实现柔性臂的精确运动和优化力传递。
柔性机器人的控制是柔性机器人研究领域的另一个重要问题。
由于柔性机器人具有较高的柔性和可变性,其控制方法不同于传统刚性机器人的控制方法。
柔性机器人的控制有两个主要方面:运动控制和力控制。
运动控制是指控制柔性机器人执行精确的位置和姿态变化。
传统的PID控制方法往往不适用于柔性机器人的运动控制,因为柔性臂具有较高的柔性和非线性。
因此,柔性机器人的运动控制方法需要考虑柔性臂的动力学特性和非线性建模方法。
力控制是指控制柔性机器人的力传递和接触力。
柔性机器人的力控制方法需要考虑柔性臂的力学特性和力传递的准确性。
目前,常用的柔性机器人控制方法包括模型预测控制、自适应控制和神经网络控制等。
综上所述,柔性机器人的机构设计和控制研究是该领域的重要研究方向。
机构设计的目标是实现柔性臂的精确运动和优化力传递,柔性机器人的机构设计方法包括柔性关节机构设计和柔性链条设计。
柔性机器人的控制方法需要考虑柔性臂的动力学特性和非线性建模方法,柔性机器人的控制方法包括运动控制和力控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
柔性关节设计
摘要柔性关节技术是一种先进的机器人关节机械臂结构,由于其“柔”的特性使得其相对于刚性关节具有更加安全、局限性更小、能量利用率更高的特点。
这也是如今各个国家及研究所大力研究机器人柔性关节的重要意义。
本文主要以柔性关节为研究对象,以变更刚度为目标,对各种可以变更刚度的柔性关节技术进行系统性分析。
关键词机器人;机械臂;柔性关节;可变更刚度
前言
随着当前科学技术的发展,机器人领域中迫切需要一种在人类工作环境中服务于人类的更加“温柔”的对人类不会造成伤害的具有环境友好性的机器人。
而这种机器人的实现需要一个必要条件,就是实现其关节柔性。
1 背景
关节类型机器人由于其灵活的活动性能、较大的活动空间等特点广泛的在工业、医疗等等各个领域内应用。
传统刚性关节设计在其运动速度、精度等方面已经达到里比较高的水平,但是随着机器人的普及,刚性关节已经不能满足人们对技术的要求;工作在一些障碍物较多的未知的环境中,刚性关节常常因为碰撞到障碍物最终导致损坏和缺失;在承担危险救援工作的时候,刚性机器人难免会对被救人员造成二次伤害,刚性机器人装上再多的传感器,安全系数也达不到人们的要求[1]。
为了改变这种现状,人们发现大自然中的动物和人类的关节表现出了很是出色的一些运动的特性,快速响应的能力、大力矩输出能力以及良好的柔顺特性。
人们通过对动物关节原理的研究和分析,柔性关节技术应运而生。
2 动物柔性关节原理研究及分析
人体的膝关节上连股骨下接胫骨,它是人体结构最复杂而且是最大的关节,人类的很多动作都要靠它来完成。
膝关节的动力由股四头肌提供,靠股四头肌收缩完成大小腿屈伸及站立动作,股四头肌通过肌腱和韧带与胫骨连接,通过韧带、肌腱牵引胫骨转动。
肌腱具有极强的黏性,在受到快速的拉伸时可以产生非常大的弹力,肌腱的串联弹性能让肌肉运动时刻处于最佳范围之内,跳跃、奔跑中,关节的肌腱和韧带可以为动物储能和释放能量,也称为弹性储能单元。
主要作用有能量储存、柔性缓冲以及能量放大。
仿照动物的关节组织,在机器人关节驱动元件与被驱动元件之间串联弹性元件,就构成了串联弹性驱动器(series elastic actuator,SEA),这种驱动器把关节柔性、抗冲击性、能量储存释放等机理引入,降低了外力的冲击,减少能耗,还
降低了精度要求[2]。
3 柔性关节设计分析
3.1 柔性关节发展背景
20世纪末,各个国家就开始对柔性关节的研究,最早由麻省理工开始,其弹性驱动技术如今已经得到广泛的应用。
研究人员已经设计出了多种可变更刚度关节机构方案。
Sensinger采用谐波齿轮减速器设计了一种特别的旋转型无回差机构,可以消除间隙而且对小扭矩的输出没有任何回弹,但其缺点是力矩解析度不能被用来进行低扭矩控制;Sugar 用并连机构实现其关节柔性;Kolacinski的V型线性弹簧机构具有优良的储能效果;Sulzer把绳子与轮系结合,设计了一个轻量型柔性关节。
这些关节大都在旋转机构中加入弹簧、阻尼结构以实现关节柔性。
3.2 可变更刚度设计
以上种种传统方法,有其一定的局限性。
这种关节对于精确位置控制技术难以实现,且能力率较低,柔性单一不可更改,局限较大。
由此基础,各国科学家设计发明了可变更刚度的柔性关节。
既能够实现机械关节的柔性,又可以随需求调节刚度,很大程度上确保了机器人的安全性,又大大提高了能量利用效率。
这种设计也能把重力势能和动能等能量储存,在关节运动的下一环节释放,减少能量输出,提高运行效率。
3.3 可变更刚度设计实例
国外对可变更刚度关节研究较早,到目前已经取得一定成果,德国航空航天中心的研究成果最为出色。
他们最先运用可变更刚度的柔性关节做成了机器人系统,叫Justin机器人。
早期加入力矩传感器,结合关节力矩及位置信息控制,使能量得以储存再利用,同时也减轻了震荡,手臂系统控制采用阻抗控制,每条手臂肩、肘部都采用可變更刚度的柔性关节技术,且用19个弹簧来实现手上的关节柔性,整体形成一个可变更刚度的柔性关节系统机械臂。
3.4 仿生柔性关节机械臂
通过对动物关节的研究和分析,根据仿生学原理,郭龙提出了一种轻巧而且可变更刚度范围较大的柔性关节,其输出刚度可通过调整机构调节,可使刚度连续变换,能够运用它来搭建仿生机械关节臂。
使用弹簧片悬臂梁结构来达到扭转刚度的目的,他们所设计的关节结构紧凑,在体积小,重量小的条件下刚度变化范围较大,连接方便且可重叠性强[3]。
4 结束语
可变更刚度的柔性关节既能有效减少在刚性关节驱动碰撞时带来的损坏,又可以将能量储存,合理优化机械能量利用效率,同时,其柔性使得机械关节在与人类协同工作时更加安全可靠,在日益发展的社会中必然将会大放异彩,得到广泛的应用。
参考文献
[1] 史延雷.一种旋转型机器人柔性关节设计与分析[D].天津:河北工业大学,2016.
[2] 郭龙.机器人可变刚度柔性关节设计分析与实验研究[D].武汉:武汉科技大学,2015.
[3] 陈宵燕.柔性臂机器人控制关键技术的研究进展[J].机械设计与研究,2015,(1):22-26,30.。