柔性关节机器人动力学分析
柔性机器人的动力学建模与控制

柔性机器人的动力学建模与控制柔性机器人是一类具有柔性和柔顺性的机器人,其外壳和关节采用柔性材料和设计,可以实现更加丰富和自然的运动,更加灵活、安全和适应性。
与传统硬体机器人相比,柔性机器人可以更好地适应不同的工作环境和任务,具有更高的可操作性和可靠性,对人类社会的未来产生了巨大的潜力和影响力。
然而,柔性机器人的动力学建模和控制仍然是一个极具挑战性的问题。
相比于硬体机器人,柔性机器人的形变和运动涉及到复杂的力学和弹性学原理,同时受到环境摩擦和可变负载的影响,使得其动力学行为难以精确建模和预测。
因此,如何对柔性机器人进行动力学建模和控制,是现代控制理论和工程技术中的一大难题,需要专家攻克。
一、柔性机器人的动力学建模在建模柔性机器人的动力学行为时,需要考虑以下几个因素:1. 机器人的几何和动力学参数:包括机器人的长度、关节角度、弹性和质量分布等参数。
2. 机器人的弹性特性:包括弹性变形、弹性恢复和振动等特性,需要采用计算机模拟和实验测试的方法进行分析。
3. 机器人的动力学方程:基于牛顿-欧拉公式和拉格朗日公式,可以建立机器人的动力学方程,并对其进行数值求解和仿真验证。
针对以上因素,我们可以将柔性机器人的动力学建模方法分为以下几类:1. 基于有限元模型的建模方法:该方法通过建立机器人的有限元模型,对机器人的振动和弹性变形进行仿真和分析,可以得到高精度的柔性机器人模型。
2. 基于传送带模型的建模方法:该方法将机器人的柔性部分视为弹性传送带,运用传送带理论对其进行建模和控制,可以有效地降低建模复杂度。
3. 基于状态空间模型和神经网络模型的建模方法:该方法通过构建机器人的状态空间模型和神经网络模型,对机器人的动力学行为进行分析和预测,可以实现更加精确和鲁棒的控制效果。
二、柔性机器人的控制方法在进行柔性机器人的控制时,需要考虑以下几个因素:1. 机器人的运动控制:包括机器人的合理路径规划、速度控制和轨迹跟踪等,以实现机器人的准确执行不同的任务。
柔性机械手系统动力学研究正文大学毕设论文
绪论现代科技的进步促进了机械手的发展,而机械手迅猛发展反过来推动科技不断进步,从上世纪60年代开始经过近五十年的发展,机械手开始应用于各行各业。
制造生产采用机械手,不仅大大提高生产率、缩短生产周期,而且保证产品质量、改善工作环境。
它的研究涉及机械设计、高等机构学、多体系统动力学、传感与信息融合技术、经典控制理论、计算机技术、人工智能、仿生学等多学科,这些相关学科的发展促进机械手向高精度、高可靠、实时性良好方向发展。
机械手动力学分析主要研究机构动力学,研究一直驱动外力的情况下,利用所建立的动力学方程求解速度、加速度、位移,主要用于计算机仿真分析。
早期研究主要为多刚体系统,各部件均视作刚体,忽略部件弹性变形因素,但是随着航空航天、机械工程等领域轻型化、高速化不断发展,考虑运动部件柔性备受关注。
柔性机械手作为典型多柔体系统广泛用于研究。
其动力学分析研究内容是考虑运动过程中关节和连杆的柔性效应带来的动力学效应,主要研究目的有两点:一建立更准确反映实际物理系统动力学模型;二设计相应控制策略抑制柔性机械手运动过程因受到驱动力、惯性力、重力作用下产生的变形和振动,保证机械手末端位姿精度和准确运动轨迹。
针对柔性机械手动力学建模问题,有Lagrange方程方法、Kane方法、旋转代数法、Newton-Euler方法等,对几个动力学建模方法分析对比,指出各种方法优缺点,揭示不同建模存在问题。
在考虑系统柔性的前提下,讨论其发展趋势,包含柔性体在内的多体系统。
1 国内外应用及发展1.1 国内外机械手领域发展趋势机械手是自动控制、可重复编程、在三维空间完成各种作业的机电一体化自动化生产设备,适合于多品种、变批量的柔性生产。
按固定程序进行抓取、装配、搬运,具有高负载自重比、低能耗、低成本,大的操作空间、高速操作能力,追求多种指标(速度、能量、动力学特性)的最佳。
表1-1柔性机械手应用军事设备、医疗仪器、安装设备、家庭体力、航空航海、国防核工业、汽车制造业、家电半导体行业、机械手应用化肥和化工、食品和药品的包装、精密仪器和军事、冲压铸、锻、焊接、热处理、机械制造、电镀、喷漆、装配、轻工业、交通运输业柔性机械手国外发展状况:一、性能提高(高速度/精度、高可靠性、便于操作/维修),价格不断下降二、模块/可重构化。
面向软体节肢机器人的柔性关节驱动器设计及特性分析

精品文档供您编辑修改使用专业品质权威编制人:______________审核人:______________审批人:______________编制单位:____________编制时间:____________序言下载提示:该文档是本团队精心编制而成,希望大家下载或复制使用后,能够解决实际问题。
文档全文可编辑,以便您下载后可定制修改,请根据实际需要进行调整和使用,谢谢!同时,本团队为大家提供各种类型的经典资料,如办公资料、职场资料、生活资料、学习资料、课堂资料、阅读资料、知识资料、党建资料、教育资料、其他资料等等,想学习、参考、使用不同格式和写法的资料,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!And, this store provides various types of classic materials for everyone, such as office materials, workplace materials, lifestylematerials, learning materials, classroom materials, reading materials, knowledge materials, party building materials, educational materials, other materials, etc. If you want to learn about different data formats and writing methods, please pay attention!面对软体节肢机器人的柔性关节驱动器设计及特性分析摘要:本文旨在开发一种适用于软体节肢机器人的柔性关节驱动器,以实现更好的控制和运动灵活性。
柔性关节机器人的动力学解耦建模与轨迹跟踪控制

THANKS.
柔性关节机器人结
02
构与运动学分析
机器人结构概述
关节类型
柔性关节机器人通常采用旋转关 节或球形关节,每个关节由电机
驱动并具有较高的自由度。
结构组成
柔性关节机器人由多个关节和连杆 组成,关节之间通过柔性连接杆连 接,使机器人具有较好的适应性和 灵活性。
应用场景
柔性关节机器人广泛应用于装配、 焊接、喷涂等生产制造领域,以及 医疗、救援等特殊领域。
实验结果与讨论
结果
实验结果表明,所提出的动力学解耦模 型能够有效地提高轨迹跟踪精度和控制 稳定性。相较于传统方法,该方法在轨 迹跟踪和鲁棒性方面表现更为优异。
VS
讨论
虽然实验取得了较好的结果,但仍存在一 些局限性。例如,实验中未考虑外部干扰 、关节摩擦等不确定性因素。未来研究将 进一步优化控制算法以适应更复杂的环境 和任务需求。此外,可以结合机器学习方 法对机器人进行更精细的控制和优化。
针对柔性关节机器人的动力学建模与 控制问题进行研究,有助于提高机器 人的运动性能和适应能力,具有重要 的理论和应用价值。
研究现状与发展
01
目前,国内外学者针对柔性关节 机器人的动力学建模与控制问题 进行了广泛研究,取得了许多重 要的研究成果。
02
随着计算机技术和控制理论的发 展,柔性关节机器人的应用领域 不断扩大,对机器人的运动性能 和适应能力的要求也越来越高。
轨迹跟踪控制
04
控制策略与算法设计
模型预测控制(MPC)
基于模型预测控制策略,对机器人关节速度和位置进行优化,实 现轨迹跟踪控制。
滑模控制(SMC)
利用滑模控制算法,根据期望轨迹与实际轨迹的误差,实现快速跟 踪控制。
关节机器人的动力学建模与控制

关节机器人的动力学建模与控制随着科技的进步,机器人在人类生活中发挥着越来越重要的角色。
其中,关节机器人作为一种常见的机器人类型,具备灵活的动作和精确的控制能力,被广泛应用于工业生产、医疗护理、教育娱乐等领域。
关节机器人的动力学建模与控制是实现机器人自主运动和交互的核心技术之一。
本文将从动力学建模和控制两个方面,探讨关节机器人的相关问题。
一、动力学建模动力学建模是对机器人运动所涉及的力学现象和运动学关系进行描述和计算的过程。
在关节机器人的动力学建模中,常涉及到机器人的质量、惯性、摩擦、关节力矩等参数。
通过建立机器人的动力学模型,可以精确描述机器人的运动特性,为后续的控制算法提供准确的基础。
关节机器人的动力学模型主要包括基于牛顿-欧拉法、拉格朗日法和伪逆法等不同数学方法的建模。
牛顿-欧拉法是一种常用的动力学建模方法,基于牛顿定律和欧拉方程,通过考虑关节力矩、重力、惯性力和摩擦力等影响因素,得到机器人的动力学方程。
拉格朗日法则是另一种常用的动力学建模方法,通过对系统的动能和势能进行建模,得到机器人的拉格朗日方程。
伪逆法是一种简化的建模方法,通过使用伪逆矩阵来逼近机器人的动力学方程,简化了复杂的动力学计算过程。
二、控制算法控制算法是关节机器人实现自主运动和交互的重要手段。
在关节机器人的控制算法中,通常包括位置控制、速度控制和力控制等几种主要方式。
这些控制方式可以根据机器人的运动特性和任务需求来选择和应用。
位置控制是最常见的控制方式之一,通过控制机器人的关节位置,实现目标位置和实际位置的一致。
位置控制通常利用PID控制器或者模糊控制器进行实现,通过计算关节位置误差和误差的导数和积分,调节控制器输出,实现位置的精确控制。
速度控制是对关节机器人运动速度进行控制的方式,通过调节关节驱动器的转速,实现机器人的期望速度。
速度控制可以辅助实现精确的位置控制,同时可以快速响应外部环境的变化。
力控制是关节机器人实现力学任务和与人类交互的重要手段。
柔性杆柔性铰机器人刚柔耦合动力学概要

南京理工大学硕士学位论文柔性杆柔性铰机器人刚柔耦合动力学姓名:刘俊申请学位级别:硕士专业:一般力学与力学基础指导教师:章定国20060531摘要随着机器人朝着高速化、精密化、轻质化和大跨度化方向发展,部件的柔性效应交得日益突出。
柔性部件在作大范围运动时,柔性变形与其大范围运动的相互耦合,以及由此而产生的“动力刚化”效应等问题增加了正确分析系统动力学性态的难度,并成为了机器人工程领域的普遍问题和关键技术。
本文在前人研究的基础上,对柔性杆柔性铰机器人刚柔耦合动力学进行了探讨。
同时考虑机器人杆件和铰的柔性变形,其中,柔性杆件变形不仅包括拉伸变形、弯曲变形,还含有扭转变形。
得到一个较完善的多杆全柔机器人模型。
采用4X4的齐次交换矩阵描述部件的位姿,并程式化地计入了杆件“动力刚化”项和铰的质量带来的影响,首次建立了多杆全柔机器人的一次刚柔耦合动力学理论模型,推导出矩阵形式的Lagrange动力学方程。
所得到的方程形式优美,结构清晰,便于计算机编程。
在建模过程分析了矩阵间的递推关系,利用这些关系进行矩阵计算,提高计算效率。
本文在最后还对不同情况下的机器人具体算例进行动力学仿真和分析。
关键词:柔性杆柔性铰机器人一次刚柔耦合动力学AbstractWith the uend of high speed,high precision,light weight and large scale ofmanipulators,the effects of flexible components become moreimportant than before.While the component is undergomg large overall motion,its elastic deformations couples with the motion,which brings some problems such as‘'dynamic stiffening" effect to increase the accuracy of dynamic analysis.These problems become the general problems and key tcchnolo#es in the area of manipulator engineering.ne discussing about the manipulators with flexible links and flexible joints is based on the former researches.m flexible effects of links and joints arc both taken into account.To the deformation ofthe links,not only the mnsinn and bending deflection are considered,but also the torsion deflection.Then the model of flexible manipulatorswith more consideration is giVeIL 4x4homogeneous transformation matrices ale used to describe the positions and orientations of components.111e dynamic stiffeningitem and the mass ofjoints Can be brought into the matric嚣.The first-order rigid-flexible coupling dynamic model of flexible manipulators is built for the first time.劬m which the Lagrange dy砌nic equations in the form of matrices have been deduced.111e equations with a nice form and clear arrangement are effective for proFamming.During the modeling,the re;cursive relation among thematrices isanalyzed,SO that the matricesCan be calculated in an ef=|[icient way. Several examples are simulated and analyzed under different conditions.Key words:flexible link,flexible joi鸸manipulator,first-order rigid-flexible coupling dynamics.Ⅱ声明本学位论文是我在导师的指导下取得的研究成果,尽我所知,在本学位论文中,除了加以标注和致谢的部分外,不包含其他人已经发表或公肖过的研究成果,也不包含我为获得任何教育机构的学位或学历箍使耀过的材料。
带有载荷的柔性杆柔性铰机器人刚柔耦合动力学分析
a dF eil- it b t C ryn a la n l bej n os a r igP yo d x o Ro
C E i i, H NG Dn —u H N S-a Z A igg o j
( co l f cecs N S N nig 10 4 C ia Sh o o i e , U T, aj 0 9 , hn ) S n n2
cr igap y a rsne . h eiit o ef xbejit sm dlda ier lsc a y al d i peetd T ef xቤተ መጻሕፍቲ ባይዱly ft eil on i o e sal al e t rn o s l i h l e n y ai
中图分 类号 :337 O 1.
文章 编号 :0 5 9 3 (02 0 — 12 0 10 — 80 2 1 ) 10 8 — 7
Ri i ・ e i l u l g Dy a i s o e i l -i k g d— x b e Co p i n m c f Flx b e- n l f n l
柔性关节机器人的凯恩动力学建模与仿真分析
渊员冤
圆援 员摇 求偏角速度与偏速度
摇 摇 凯恩方法中的偏速度或偏角速度并不是速度
收稿日期院圆园员缘 原 员员 原 员苑 基金项目院江苏省研究生培养创新工程渊 杂允蕴载赃园员员怨冤 曰中央高校基本科研业务费专项资金资助 作者简介院崔文渊员怨怨园要冤 袁男袁江苏徐州人袁南京航空航天大学硕士研究生袁主要研究方向为机器人动力学与控制遥
学方程
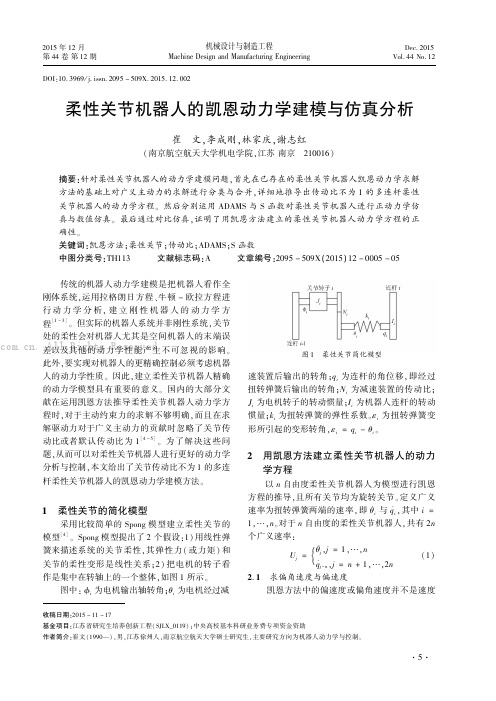
以 灶 自由度柔性关节机器人为模型进行凯恩
方程的推导袁且所有 关 节 均 为 旋 转 关 节遥 定 义 广 义 速率为扭转弹簧两端的速率袁即 兹觶 蚤 与 择觶 蚤袁其中 蚤 越 员袁噎袁灶遥对于 灶 自由度的柔性关节机器人袁共有 圆灶
个广义速率院
哉躁 越
兹觶 躁 袁躁 越 员袁噎袁灶 择觶 躁原灶袁躁 越 灶 垣 员袁噎袁圆灶
图 员摇 柔性关节简化模型
速装置后输出的转角曰择蚤 为连杆的角位移袁即经过 扭转弹簧后输出的转角曰晕蚤 为减速装置的传动比曰 允蚤 为电机转子的转动惯量曰陨蚤 为机器人连杆的转动 惯量曰噪蚤 为扭转弹簧的弹性系数遥着蚤 为扭转弹簧变 形所引起的变形转角袁着蚤 越 择蚤 原 兹蚤 遥
圆摇 用凯恩方法建立柔性关节机器人的动力
阅韵陨院员园援 猿怨远怨 辕 躁援 蚤泽泽灶援 圆园怨缘 原 缘园怨载援 圆园员缘援 员圆援 园园圆
柔性关节机器人的凯恩动力学建模与仿真分析
崔摇 文袁李成刚袁林家庆袁谢志红
渊 南京航空航天大学机电学院袁江苏 南京摇 圆员园园员远冤
摘要院针对柔性关节机器人的动力学建模问题袁首先在已存在的柔性关节机器人凯恩动力学求解 方法的基础上对广义主动力的求解进行分类与合并袁详细地推导出传动比不为 员 的多连杆柔性 关节机器人的动力学方程遥 然后分别运用 粤阅粤酝杂 与 杂 函数对柔性关节机器人进行正动力学仿 真与数值仿真遥 最后通过对比仿真袁证明了用凯恩方法建立的柔性关节机器人动力学方程的正 确性遥 关键词院凯恩方法曰柔性关节曰传动比曰粤阅粤酝杂曰杂 函数 中图分类号院栽匀员员猿摇 摇 摇 文献标志码院粤摇 摇 摇 文章编号院圆园怨缘 原 缘园怨载渊圆园员缘冤员圆 原 园园园缘 原 园缘
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
柔性关节机器人动力学分析
王鸿熠;韩先国
【摘要】近年来,工业机器人以其机动、灵巧等特点,开始应用于越来越多的领域.但串联机器人刚度较差,使得其应用场景受到了一定的限制.采用拉格朗日法,建立了考虑关节柔性的机器人动力学模型,并规划了机器人运动轨迹.建立了Simulink仿真模型,得出了机器人各关节角度在指定运动情况下的关节变形情况,并分析了机器人末端振动情况.
【期刊名称】《现代制造技术与装备》
【年(卷),期】2018(000)007
【总页数】2页(P88-89)
【关键词】工业机器人;关节柔性;拉格朗日动力学;末端振动
【作者】王鸿熠;韩先国
【作者单位】北京航空航天大学机械工程及自动化学院,北京 100191;北京航空航天大学机械工程及自动化学院,北京 100191
【正文语种】中文
自诞生至今,工业机器人在工业领域得到了越来越多的应用[1]。
近年来,除了在传统的焊接、喷涂等领域的应用外,工业机器人以其机动、灵巧等特点,开始越来越多地应用于航空航天领域[2-3]。
但串联机器人刚度较差,使得其应用受到了一定的限制。
机器人动力学是对机器人刚度分析及振动分析的重要基础。
本文以ABB IRB4600
机器人为对象,建立了考虑关节柔性的动力学模型,并给定了机器人运动轨迹,分析了机器人运动过程中的关节变形情况。
1 关节柔性模型简化
1.1 机器人柔性来源分析
串联型工业机器人的柔性主要体现在两个方面,即连杆柔性和关节柔性[4]。
连杆
柔性表现为机器人各杆在力的作用下发生变形。
关节柔性表现为各个关节在力的作用下发生形变。
通常,机械臂各连杆刚度大于关节刚度,机器人连杆变形可以忽略,现仅考虑机器人关节柔性造成的影响[5]。
关节柔性造成的影响主要有两点。
一是在机器人运动过程中,机器人各关节受到驱动力作用,产生关节变形,该形变影响了机器人的绝对定位精度。
二是机器人的振动,其主要体现在两个方面:当机器人运动结束后,各关节的变形依然存在,随着运动过程中积累的能量释放,系统出现残余振动;机器人在某一位姿下,受到变化的外部力作用,各关节变形也随之改变,导致系统振动。
本文重点分析机器人运动过程中及运动结束后机器人关节角度及末端振动情况。
1.2 关节柔性模型简化
spong在1987年首先提出了柔性关节简化模型。
该简化模型对于实际关节有如
下假设:机器人关节在关节力作用下只存在微小变形,该变形处于线弹性范围内,机器人各关节可视作线性扭簧;电机转子轴线与关节轴线同轴,可将电机转子视为质量均匀的轴对称刚体;将电机视为理想力矩源,与机械动力学相比,电机电气动力学足够快,可以忽略其动力学影响。
根据以上假设,可以将机器人关节简化为一线性扭簧(扭簧刚度为k)。
2 机器人运动学分析
2.1 机器人坐标系建立
机器人坐标系建立是机器人运动学分析及动力学分析的前提。
采用前置D-H参数法,建立IRB4600关节型机器人连杆坐标系,如图1所示。
图1 机器人连杆坐标系示意图
2.2 机器人正向运动学
机器人相邻两杆间的位姿变化矩阵可以表示为i可以得到机器人末端相对于机器人基坐标系的齐次变换矩阵为:
3 关节柔性机器人模型
3.1 柔性关节机器人动力学
拉格朗日法推导机器人系统动力学方程的步骤可以概括为:(1)选取机器人关节坐标系、电机转子转角坐标系为广义坐标;(2)求解系统动能表达式,包括连杆动能与电机钻子动能;(3)求解连杆与电机转子势能;(4)构造拉格朗日函数并推导动力学方程。
关节柔性的机器人连杆系统动力学方程可以表示为:
式中:τext为外力作用下关节力矩;M(q)为质量矩阵;H(q,q˙)为非线性科氏力和离心力矢量;G(q)为重力项;K=diag(k1,k2,k3,k4,k5,k6)为关节刚度矩阵;
D=diag(d1,d2,d3,d4,d5,d6)为关节阻尼矩阵。
3.2 关节柔性机器人运动仿真
3.2.1 关节空间的轨迹规划
在关节空间内采用三次多项式进行轨迹规划。
对于关节i,驱动机构输出转角θi可表示为时间的函数,设其三次多项式参数为ai0、ai1、ai2、ai3,即:
给定机器人各关节首末角度及运动时间,即可确定机器人电机输出转角、角速度随
时间的变化规律。
表1为机器人关节转角变化情况,设定运动时间为2.5s。
机器人在运动首末端点的速度值均为0,得到三次多项式各项系数。
表2 运动仿真起始值与终止值关节序号 1 2 3 4 5 6起始姿态27.2° -88.4° 7.1° -178.0° -76.6° -115.1°终止姿态26.5° -90.3° 9.1° -177.7° -76.5° -118.0°
3.2.2 Simulink运动仿真分析
在机器人运动过程,机器人末端所受广义外力为0,可将式(2)改写为:
需要注意的是,式(4)中各项的刚度不同,在数值分析中,该种形式的微分方程被称为刚性方程,又被称为病态方程。
病态方程的求解相较于通常的微分方程更为困难,MATLAB中的simulink仿真模块包含多种求解方法,其中的ODE15s求解方法属于一种多步预测算法,适合求解大刚度系统的微分方程。
在simulink中搭建仿真模型,可以得出机器人运动过程中及运动结束后,机器人各关节的变形情况及关节角度随时间的变化情况,通过式(1)即可得到机器人末端位置在机器人基坐标系中X、Y、Z三个轴方向的误差值,如图2所示。
图2 机器人末端振动随时间的变化规律
分析图2可得,在机器人运动过程中,由于关节柔性的存在,机器人末端位置与理论位置之间存在误差,该误差随着运动时间的延续表现为末端振动情况。
在运动结束后,机器人末端位置与理论位置并不重合,这是由于重力因素造成的。
4 结论
本文采用D-H参数建立了机器人连杆坐标系,求得了机器人运动学模型。
采用拉格朗日法建立了考虑关节柔性的机器人动力学模型。
在制定机器人各关节运动首末关节角度值和运动时间后,对机器人的运动轨迹在关节坐标系内进行了三次多项式运动规划。
建立了simulink仿真模型,得出了机器人各关节角度在指定运动情况下的关节变形情况,并分析了机器人末端振动情况,这对于工业机器人动力学相关
研究有一定的借鉴意义。
参考文献
【相关文献】
[1]陶永,王田苗.我国工业机器人技术现状与产业化发展战略[J].机械工程学报,2014,50(9):1-13.
[2]邹方.飞机装配迎来机器人时代[J].航空制造技术,2009,(24):34-37.
[3]冯华山,秦现生,王润孝.航空航天制造领域工业机器人发展趋势[J].航空制造技术,2013,(19):32-37.
[4]章定国,芮筱亭.多杆空间柔性机器人递推拉格朗日动力学建模和仿真[J].应用数学和力学,2009,30(10):1202-1212.
[5]沈孝栋,刘长毅,张柏寿.考虑关节柔性的机器人制孔过程动力学仿真[J].机械设计与制造,2015,(3):196-200.。