操作系统存储器管理
计算机操作系统存储管理

计算机操作系统存储管理计算机操作系统存储管理是指操作系统在运行过程中管理和控制计算机的存储资源的一种机制。
它负责分配和回收内存,以及保护和管理进程的内存访问权限。
存储管理是操作系统中的一个重要子系统,对系统的性能和稳定性具有重要影响。
本文将介绍计算机操作系统存储管理的基本原理、常见的存储管理技术以及其在实际应用中的作用。
一、存储管理的基本原理在计算机系统中,存储器扮演着重要的角色,它用于存储程序、数据和系统状态。
计算机操作系统存储管理的基本原理是将物理内存划分为多个逻辑区域,每个区域被分配给不同的程序或进程使用。
操作系统维护一个内存分配表,记录每个逻辑区域的使用情况,并根据请求进行内存分配与回收。
当进程创建时,操作系统将为其分配一定大小的内存,当进程终止时,操作系统会回收这些内存资源。
同时,存储管理还负责处理内存碎片问题,通过内存的动态分配与合并来最大化利用内存资源。
二、常见的存储管理技术1. 基于固定分区的存储管理技术基于固定分区的存储管理技术是最早的一种存储管理方法。
它将物理内存划分为若干固定大小的分区,每个分区只能分配给一个进程使用。
该方法简单直观,但由于分区的固定大小,会产生很多内存碎片,不利于内存的高效利用。
2. 基于可变分区的存储管理技术为了解决内存碎片问题,出现了基于可变分区的存储管理技术。
这种技术允许每个进程动态地申请和释放内存空间,分区的大小可以根据进程的需要进行调整。
它相对于固定分区的方法更加灵活,能够提高内存利用率,但也存在内存碎片问题。
3. 页式存储管理技术页式存储管理技术将物理内存和逻辑内存划分为固定大小的页块,进程的地址空间也被划分为相同大小的页。
通过将逻辑地址转换为物理地址,实现了逻辑内存与物理内存的映射。
该技术可以很好地解决内存碎片问题,并且方便创建和销毁进程,但需要额外的地址转换开销。
4. 段式存储管理技术段式存储管理技术将进程的逻辑地址空间划分为若干段,每个段具有不同的长度和属性。
操作系统存储器管理实验心得

操作系统存储器管理实验心得操作系统存储器管理实验心得实验是我们每个学生都要经历的,通过这次实验使我更深刻地了解到了计算机硬件设备的组成和工作原理。
它给我的感触颇多:首先让我体会到要想当一名优秀的电脑维修人员必须具有良好的基础知识。
只有熟悉硬件设备才能在短时间内判断出故障并排除。
其次我也认识到电脑发展迅速,仅靠掌握操作系统及软件应用方面的知识还不够,还要懂得硬件的结构、性能等。
再者通过本次实验,对我们电子专业的学生来说更加有益。
学习掌握了更为高级的知识后可以在社会上做一些相关的工作,比如程序开发、硬件维护等。
而且将自己所学的知识真正运用于实践中,是对理论知识最好的检验。
而且,在实践中培养的动手能力和团队精神也是非常重要的。
第一节课时老师讲了一些关于内存的知识,让我们了解了什么是虚拟存储器,其实就是我们的硬盘。
但是现代电脑已经不单纯局限于传统意义上的硬盘和光驱,我们的内存越来越大,越来越快,已达到惊人的几十 GB。
它们各司其职,共同保证着你的电脑安全顺利的工作。
它们之间的配合也至关重要。
现在随便拿一台新买回来的笔记本电脑进行检测都会发现它们在内存和 CPU 之间还装了一块很小的内存芯片。
其实,这样的内存芯片是用来临时存放我们正在编写的程序,防止突然死机造成损失。
第二节课老师教授我们如何去识别和判定硬盘坏道,虽然我觉得很难,因为以前从未接触过此类问题。
看来在平时学习中积累相关的经验很重要啊!老师先让我们通过 DOS 命令判断自己电脑中的硬盘数据是否正常。
通过学习和练习我终于学会了通过命令“ chkdsk”对硬盘数据进行修复,在学习的过程中遇到许多困难,但是我坚持下来了,努力克服一切困难完成了任务。
学习是一个循序渐进的过程,刚开始根本不知道如何去查看自己硬盘的健康状况。
后来经过请教了其他班的同学才慢慢弄清楚怎么查看。
这种东西真是千变万化,让人捉摸不透。
俗话说磨刀不误砍柴功,无论干哪一行没有扎实的基础知识肯定是寸步难行的。
操作系统原理第5章 存储管理
• ⑶最佳适应算法
• 最佳适应算法的空闲链是按空闲区从小到大顺序排 列。为进程选择分区时总是寻找其大小最接近进程 所要求的存储区域。所谓“最佳”是指每次为进程 分配内存时,总是把能满足要求、又是最小的空闲 分区分配给进程,避免“大材小用”。
• 因为每次分配后所切割下来的剩余部分总是最小的, 这样将加速碎片的形成。
• ①如果被回收空闲分区没有空闲伙伴分区,那么保留该分区为一 个独立的空闲分区,否则执行②;
• ②合并回收分区及其伙伴分区,从而得到一个尺寸(2I+1)更大的 回收空闲分区,转移到①;
一个伙伴系统内存分配与回收的例子
• 伙伴系统克服了固定分区和动态分区存储管理技术的缺陷。但是伙伴 系统存在一个问题,即内存空间需要不断地进行分裂和合并,频繁的 伙伴分区合并操作会浪费很多时间。
• ③内存分配原则,以页帧为单位来分配内存,将进程若干个逻辑上连续的 页面装入若干个离散的页帧中,由页表提供进程的页号到存储空间帧号的 映射。
5.2.4伙伴系统
• 其实现原理如下: • 一个伙伴系统内存的用户可用空间为2U。进程申请存储空间时,
系统总是为其分配大小为2I的一个空闲分区。其中S≤I≤U,2S是系 统允许的最小分区尺寸。在实际操作系统中,最小分区尺寸一般 为212。 • 如果进程申请的存储空间大小为K,且2I-1<K≤2I,则将整个2I大小的 分区分配给该进程;否则,该分区被分割成两个大小相等的伙伴 分区,大小为2I-1;再判断K是否满足条件:2I-2<K≤2I-1,若满足条件, 则将两个伙伴中的任何一个分配给该进程。否则,将其中一个伙 伴又分成两个大小相等的伙伴分区;此过程一直继续进行,直到 产生的分区满足条件I-J≥S并2I-J-1<K≤2I-J,将2I-J大小的分区分配给该 进程;当I-J-1<S时,系统不再分割成两个大小相等的伙伴分区,将 2S大小的分区分配给该进程。 • 当进程执行完毕,释放一个尺寸为2I的分区时,系统用下面的算法 回收该分区。
计算机操作系统第四章-存储器管理
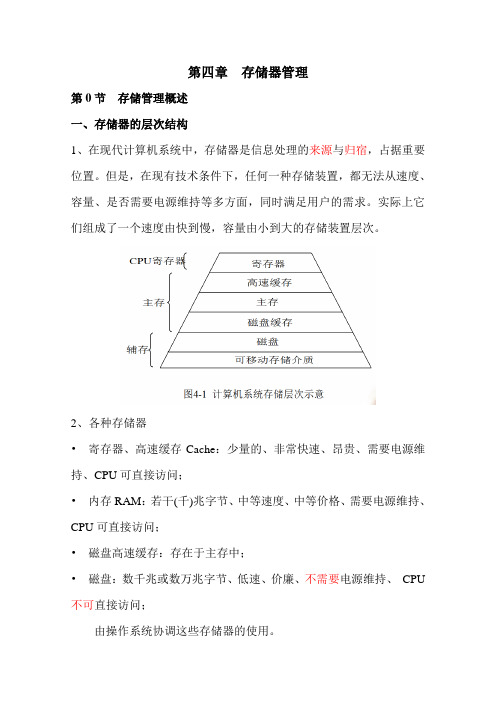
第四章存储器管理第0节存储管理概述一、存储器的层次结构1、在现代计算机系统中,存储器是信息处理的来源与归宿,占据重要位置。
但是,在现有技术条件下,任何一种存储装置,都无法从速度、容量、是否需要电源维持等多方面,同时满足用户的需求。
实际上它们组成了一个速度由快到慢,容量由小到大的存储装置层次。
2、各种存储器•寄存器、高速缓存Cache:少量的、非常快速、昂贵、需要电源维持、CPU可直接访问;•内存RAM:若干(千)兆字节、中等速度、中等价格、需要电源维持、CPU可直接访问;•磁盘高速缓存:存在于主存中;•磁盘:数千兆或数万兆字节、低速、价廉、不需要电源维持、CPU 不可直接访问;由操作系统协调这些存储器的使用。
二、存储管理的目的1、尽可能地方便用户;提高主存储器的使用效率,使主存储器在成本、速度和规模之间获得较好的权衡。
(注意cpu和主存储器,这两类资源管理的区别)2、存储管理的主要功能:•地址重定位•主存空间的分配与回收•主存空间的保护和共享•主存空间的扩充三、逻辑地址与物理地址1、逻辑地址(相对地址,虚地址):用户源程序经过编译/汇编、链接后,程序内每条指令、每个数据等信息,都会生成自己的地址。
●一个用户程序的所有逻辑地址组成这个程序的逻辑地址空间(也称地址空间)。
这个空间是以0为基址、线性或多维编址的。
2、物理地址(绝对地址,实地址):是一个实际内存单元(字节)的地址。
●计算机内所有内存单元的物理地址组成系统的物理地址空间,它是从0开始的、是一维的;●将用户程序被装进内存,一个程序所占有的所有内存单元的物理地址组成该程序的物理地址空间(也称存储空间)。
四、地址映射(变换、重定位)当程序被装进内存时,通常每个信息的逻辑地址和它的物理地址是不一致的,需要把逻辑地址转换为对应的物理地址----地址映射;地址映射分静态和动态两种方式。
1、静态地址重定位是程序装入时集中一次进行的地址变换计算。
物理地址= 重定位的首地址+ 逻辑地址•优点:简单,不需要硬件支持;•缺点:一个作业必须占据连续的存储空间;装入内存的作业一般不再移动;不能实现虚拟存储。
操作系统复习存储器管理
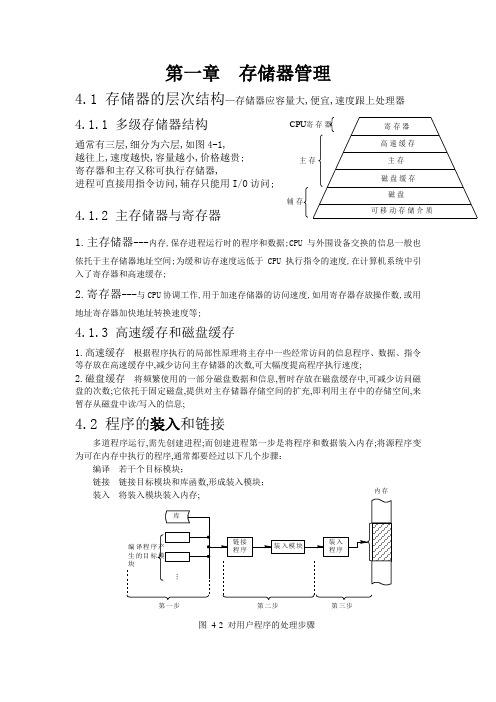
第一章 存储器管理4.1 存储器的层次结构—存储器应容量大,便宜,速度跟上处理器4.1.1 多级存储器结构通常有三层,细分为六层,如图4-1, 越往上,速度越快,容量越小,价格越贵; 寄存器和主存又称可执行存储器,进程可直接用指令访问,辅存只能用I/O 访问;4.1.2 主存储器与寄存器1.主存储器---内存,保存进程运行时的程序和数据;CPU与外围设备交换的信息一般也依托于主存储器地址空间;为缓和访存速度远低于CPU 执行指令的速度,在计算机系统中引入了寄存器和高速缓存;2.寄存器---与CPU 协调工作,用于加速存储器的访问速度,如用寄存器存放操作数,或用地址寄存器加快地址转换速度等;4.1.3 高速缓存和磁盘缓存1.高速缓存---根据程序执行的局部性原理将主存中一些经常访问的信息程序、数据、指令等存放在高速缓存中,减少访问主存储器的次数,可大幅度提高程序执行速度;2.磁盘缓存---将频繁使用的一部分磁盘数据和信息,暂时存放在磁盘缓存中,可减少访问磁盘的次数;它依托于固定磁盘,提供对主存储器存储空间的扩充,即利用主存中的存储空间,来暂存从磁盘中读/写入的信息;4.2 程序的装入和链接多道程序运行,需先创建进程;而创建进程第一步是将程序和数据装入内存;将源程序变为可在内存中执行的程序,通常都要经过以下几个步骤:编译---若干个目标模块;链接---链接目标模块和库函数,形成装入模块;装入---图 4-2 对用户程序的处理步骤寄存器高速缓存主存磁盘缓存磁盘可移动存储介质CPU 寄存器主存辅存第一步第二步第三步内存4.2.1 程序的装入——无需连接的单目标模块装入理解装入方式1. 绝对装入方式Absolute Loading Mode ---只适用单道程序环境如果知道程序的内存位置,编译将产生绝对地址的目标代码,按照绝对地址将程序和数据装入内存;由于程序的逻辑地址与实际内存地址完全相同,故不须对程序和数据的地址进行修改;绝对地址:可在编译时给出或由程序员直接赋予;若由程序员直接给出,不利于程序或数据修改,因此,通常是在程序中采用符号地址,然后在编译或汇编时转换为绝对地址;2. 可重定位装入方式Relocation Loading Mode ---适于多道程序环境多道程序环境下,编译程序不能预知目标模块在内存的位置;目标模块的起始地址是0,其它地址也都是相对于0计算的;此时应采用可重定位装入方式,根据内存情况,将模块装入到内存的适当位置,如图4-3 作业装入内存时的情况 ;3.动态运行时装入方式Dynamic Run-time Loading ---适于多道程序环境可重定位装入方式并不允许程序运行时在内存中移动位置;但是,在运行过程中它在内存中的位置可能经常要改变,此时就应采用动态运行时装入方式;动态运行时的装入程序,在把装入模块装入内存后,并不立即把装入模块中的相对地址转换为绝对地址,而是把这种地址转换推迟到程序真正执行时才进行;因此,装入内存后的所有地址都仍是相对地址;问题:程序装入内存后修改地址的时机是什么4.3 连续分配方式4.3.3 动态分区分配——根据进程需要动态分配内存1. 分区分配中的数据结构1 空闲分区表—用若干表目记录每个空闲分区的分区序号、分区始址及分区的大小等数据项;2 空闲分区链--为实现对空闲分区的分配和链接,在每分区起始部分,设置前向指针,尾部则设置一后向指针;为检索方便,在分区前、后向指针中,重复设置状态位和分区大小表目;当分0内存空间区被分配后,把状态位由“0”改为“1”时,前、后向指针失去意义;图 4-5 空闲链结构2. 分区分配算法P1231首次适应算法first-fit —空闲分区链以地址递增次序链接 每次按分区链的次序从头查找,找到符合要求的第一个分区;2 循环首次适应算法—FF 算法的变种从上次找到的空闲分区位置开始循环查找,找到后,修改起始查找指针; 3 最佳适应算法—空闲分区按容量从小到大排序 把能满足要求的、最小的空闲分区分配给作业 4 最坏适应算法——空闲分区按容量从大到小排序 挑选最大的空闲区分给作业使用;5) 快速适应算法—根据容量大小设立多个空闲分区链表3. 分区分配操作1.分配内存请求分区u.size; 空闲分区m.size; m.size-u.size ≤size,说明多余部分太小, 不再切割,将整个分区分配给请求者;否则从该分区中划分一块请求大小的内存空间,余下部分仍留在空闲分区链;如图4-6 内存分配流程;2.回收内存1 回收区与插入点的前一空闲分区F1相邻:合并,修改F1大小;2 回收区与后一空闲分区F2相邻:合并,修改首地址和大小;3 回收区同时与前、后两个分区邻接:合并,修改F1大小,取消F2;4 回收区不邻接:新建表项,填写首地址和大小,并插入链表;如图前向指针N +20N 个字节可用后向指针N +2图 4-6 内存分配流程4.3.6 可重定位分区分配1.动态重定位的引入例:在内存中有四个互不邻接的小分区,容量分别为10KB 、30KB 、14KB 和26KB;若现有一作业要获得40KB 的内存空间,因连续空间不足作业无法装入;可采用的一种解决方法是:通过移动内存中作业的位置,以把原来多个分散的小分区拼接成一个大分区的方法,称为“拼接”或“紧凑;由于用户程序在内存中位置的变化,在每次“紧凑”后,都必须对移动了的程序或数据进行重定位;图 4-8 紧凑的示意4.3.7 对换即中级调度1. 对换Swapping 的引入(a ) 紧凑前(b ) 紧凑后“活动阻塞”进程占用内存空间;外存上的就绪作业不能进入内存运行;所谓“对换”,是指把内存中暂时不能运行的进程或者暂时不用的程序和数据,调出到外存上,以便腾出足够的内存空间;再把已具备运行条件的进程或所需要的程序和数据,调入内存;对换是提高内存利用率的有效措施;根据对换单位可分为:进程对换、页面对换和分段对换;为了能实现对换,系统应具备以下三方面功能:对换空间的管理、进程的换出与换入2. 进程的换出与换入1进程的换出选择阻塞且优先级最低的进程,将它的程序和数据传送到磁盘对换区上;回收该进程所占用的内存空间,并对该进程的进程控制块做相应的修改;2进程的换入找出“就绪” 但已换出到磁盘上时间最久的进程作为换入进程,将之换入,直至已无可换入的进程;4.4 基本分页存储管理方式前面的连续分配方案会形成许多“碎片”,“紧凑”方法可以解决碎片但开销大;是否允许进程离散装入 离散单位不同,称分页式存储和分段式存储;不具备对换功能称为“基本分页式”,支持虚拟存储器功能称为“请求基本分页式”;4.4.1 页面与页表1. 页面1 页面和物理块---将进程的逻辑地址空间分成若干个大小相等的片,称为页面,并为各页编号;相应地把内存空间分成与页面相同大小的若干个存储块,称为物理块,也同样编号;分配时,将进程中的页装入到物理块中,最后一页经常装不满一块而形成 “页内碎片”;2 页面大小---页面的大小应选择适中;页面太小,内存碎片减小,利用率高;但页表过长,占大量内存;页面较大,页表长度小;但页内碎片大;因此,页面的大小应选择得适中,且页面大小应是2的幂,通常为512 B~8 KB;2. 地址结构分页地址中的地址结构如下:31 12 11 0它含有两部分:页号P12~31位,最多有1M 页和页内位移量W0~11位,每页的大小4KB ; 对某特定机器,其地址结构是一定的;若给定一个逻辑地址空间中的地址为A,页面的大小为L,则页号P 和页内地址d 可按下式求得:MODL A d L A INT P ][=⎥⎦⎤⎢⎣⎡=3. 页表---实现从页号到物理块号的地址映射用户程序0 页1 页2 页3 页4 页5 页…n 页页表内存4.4.2 地址变换机构任务:将逻辑地址转换为物理地址;页内地址变换:因页内地址与物理地址一一对应, 可直接转换;页号变换:页表可实现从逻辑地址中页号到内存中物理块号的变换; 1.基本的地址变换机构a. 页表功能可由一组专门的寄存器实现原理;b. 页表大多驻留内存,系统中只设置一页表寄存器来存放页表在内存的始址和页表长度实际操作;c. 进程未执行时,页表始址和长度存放在PCB 中;执行时才将这两个数据装入页表寄存器中过程;图 4-12 分页系统的地址变换机构2. 具有快表的地址变换机构a. 仅用页表寄存器时,CPU 每存取一数据要两次访问内存页表-地址变换-数据;b. 为提高地址变换速度,可在地址变换机构中增设一具有并行查寻能力的特殊高速缓冲寄存器用以存放当前访问的那些页表项,称为“快表”;c. ->在CPU 给出逻辑地址,将页号P 送入快表 ->页号匹配,读物理块号后送物理地址寄存器->无匹配页号,再访问内存中页表,把从页表项中读出的物理块号送地址寄存器;同时,再将此页表项存入到快表中;->如快表已满,则OS 须找到一换出页表项换出; 为什么增加“快表”为了提高地址变换速度,可在地址变换机构中增设一个具有并行查寻能力的特殊高速缓冲寄存器,又称为“联想寄存器”Associative Memory,或称为“快表 “快表”有何缺点越界中断图 4-13 具有快表的地址变换机构4.5 基本分段存储管理方式4.5.1 分段存储管理方式的引入为什么引入推动内存从固定分配到动态分配直到分页存储,主要动力是内存利用率,而引入分段存储管理方式,主要是为了满足用户和程序员的下述一系列需要:1方便编程---把作业按逻辑关系划分为若干段,每段有自己的名字和长度,并从0开始编址;LOAD 1,A|<D>; STORE 1,B|<C>2 信息共享---段是信息的逻辑单位;为实现共享,存储管理应与用户程序分段的组织方式相适应;3 信息保护---对信息的逻辑单位进行保护,应分段管理;4 动态增长---分段存储能解决数据段使用过程中动态增长;5 动态链接---运行过程中动态调入以段为单位的目标程序;4.5.2 分段系统的基本原理1. 分段作业划分为若干段,如图4-16,每个段用段号来代替段名,地址空间连续;段的长度由逻辑信息长度决定,因而各段长度不等;其逻辑地址由段号段名和段内地址所组成,结构如下: 31 16 15 0该地址结构中,允许一个作业最多有64K 个段,每个段的最大长度为64KB;编译程序能自页表寄存器逻辑地址L 物理地址动根据源程序产生若干个段;2.段表,其中每段占一个表项,中;图4-16 利用段表实现地址映射3.分页和分段的主要区别1 页是信息的物理单位,分页是为提高内存的利用率,是为满足系统管理的需要;段则是信息的逻辑单位,分段是为了能更好地满足用户的需要;2 页的大小固定且分页由系统硬件实现;而段的长度不固定,通常由编译程序根据信息的性质来划分;3 分页的作业地址空间是一维的,程序只需一个地址记忆符;而分段的作业地址空间是二维的,程序员既需给出段名,又需给出段内地址;4.5.3 信息共享可重入代码纯代码:允许多个进程同时访问的代码;绝对不允许可重入代码在执行中改变,因此,不允许任何进程修改它;4.5.4 段页式存储管理方式1.基本原理---,,,4KB;作业空间内存空间子程序段数据段(a)段号(S)段内页号(P)页内地址(W)(b)主程序段图4-21 利用段表和页表实现地址映射4.6 虚拟存储器的基本概念前面各种存储器管理方式共同点:它们要求将一个作业全部装入内存后方能运行,于是出现了下面这样两种情况:1 有的作业很大,其所要求的内存空间超过了内存总容量,作业不能全部被装入内存,致使该作业无法运行;2 有大量作业要求运行,但由于内存容量不足以容纳所有这些作业,只能将少数作业装入内存让它们先运行,而将其它大量的作业留在外存上等待;4.5.1 虚拟存储器的引入1.常规存储器管理方式的特征1 一次性;将作业全部装入内存后方能运行,此外有许多作业在每次运行时,并非其全部程序和数据都要用到;一次性装入,造成了对内存空间的浪费;2 驻留性;作业装入内存后一直驻留,直至运行结束;尽管因故等待或很少运行,都仍将继续占用宝贵的内存资源;现在要研究的问题是:一次性及驻留性在程序运行时是否必需;2.局部性原理早在1968年, Denning.P就曾指出:1 程序执行时,除了少部分的转移和过程调用指令外,在大多数情况下仍是顺序执行的;2 过程调用将会使程序的执行轨迹由一部分区域转至另一部分区域,但经研究看出,过程调用的深度在大多数情况下都不超过5;3 程序中存在许多循环结构,这些虽然只由少数指令构成, 但是它们将多次执行;4 程序中还包括许多对数据结构的处理, 如对数组进行操作,它们往往都局限于很小的范围内;局限性主要表现在下述两个方面:1 时间局限性-由于循环操作的存在;如果程序中的指令或数据一旦执行,则不久以后可能再次访问;2 空间局限性-由于程序的顺序执行;程序在一段时间内所访问的地址,可能集中在一定的范围之内;3. 虚拟存储器定义---基于局部性原理程序运行前,仅须将要运行的少数页面或段装入内存便可启动,运行时,如果需要访问的页段尚未调入内存缺页或缺段,用OS提供请求调页段功能调入;如果此时内存已满,则还须再利用页段的置换功能,将内存中暂时不用的页段调至外存,腾出足够的内存空间后,再将要访问的页段调入;所谓虚拟存储器,是指具有请求调入功能和置换功能,能从逻辑上扩充内存容量的一种存储器系统;其逻辑容量由内存容量和外存容量之和所决定,其运行速度接近于内存,成本接近于外存;4.6.3 虚拟存储器的特征1)多次性---一个作业被分成多次调入内存运行,最初装入部分程序和数据,运行中需要时,再将其它部分调入;2)对换性---允许在作业的运行过程中进行换进、换出;换进和换出能有效地提高内存利用率;3)虚拟性---从逻辑上扩充内存容量,使用户所看到远大于实际内存容量;这是虚拟存储器最重要的特征和最重要的目标;4)离散性---是以上三个特性的基础,在内存分配时采用离散分配的方式;备注:虚拟性是以多次性和对换性为基础的,而多次性和对换性又必须建立在离散分配的基础上;4.7 请求分页存储管理方式4.6.1 请求分页中的硬件支持---页表、缺页中断和地址变换请求分页系统是在分页的基础上,增加了“请求调页”和“页面置换”功能,每次调入和换出基本单位都是长度固定的页,实现比请求分段简单;1.页表机制---将用户地址空间中的逻辑地址变换为内存空间中的物理地址,因只将部分调入内存,需增设若干项;在请求分页系统中的每个页表项如下所示:1 状态位P:该页是否已调入内存,供访问时参考;2 访问字段A:记录一段时间内本页被访问的频率,供选择换出页时参考;3 修改位M:页在调入内存后是否被修改过,供置换页面时参考;4 外存地址:指出该页在外存上的地址,即物理块号,供调入该页时参考;4.7.2 内存分配策略和分配算法1.最小物理块数的确定是指能保证进程正常运行所需的最小物理块数,当系统为进程分配的物理块数少于此值时,进程将无法运行;进程应获得的最少物理块数与计算机的硬件结构有关;对于某些简单的机器,所需的最少物理块数为2,分别用于存放指令和数据,间接寻址时至少要有三块;对于某些功能较强的机器,因其指令本身、源地址和目标地址都可能跨两个页面,至少要为每个进程分配6个物理块,以装入这些页面;2. 物理块的分配策略请求分页系统的两种内存分配策略:即固定和可变分配策略;两种置换策略:即全局置换和局部置换;可组合出以下三种策略;1 固定分配局部置换Fixed Allocation, Local Replacement--每进程分配一定数目的物理块,在整个运行期间都不再改变,换入换出都限于这些物理块;每个进程物理块难以确定,太多太少都不好2 可变分配全局置换Variable Allocation, Global Replacement --每进程分配一定数目的物理块,OS 保持一空闲物理块队列;进程缺页时,摘下一空闲块,并将该页装入;3 可变分配局部置换Variable Allocation, Local Replacemen --每进程分配一定数目的物理块;进程缺页时,只允许从该进程内存页中选出一页换出;若缺页中断频繁,再为该进程分配若干物理块,直至缺页率减少;若缺页率特低,则减少该进程的物理块数,应保证缺页率无明显增加;3. 物理块分配算法1 平均分配算法--将所有可供分配的物理块,平均分配给各个进程; 例如,有100个物理块,5个进程,每进程可分20个物理块;未考虑到各进程本身的大小;2 按比例分配算法--根据进程的大小按比例分配物理块;共n 个进程,每进程页面数为si,则页面数的总和为:设可用的物理块为m,每进程分到的物理块数为bi,有:3 考虑优先权的分配算法--为了照顾重要、紧迫的作业尽快完成,为它分配较多的空间;通常采取:把可供分配的物理块分成两部分:一部分按比例分给各进程;另一部分根据优先权分给各进程;有的系统是完全按优先权来分配;4.7.3 调页策略1. 何时调入页面1 预调页策略缺页前 :页面存放连续,用预测法一次调入多个相邻页,预测成功率仅为50%;2 请求调页策略缺页时:运行中,发现不在内存,立即请求,由OS 调入;2. 从何处调入页面请求分页系统中外存分为两部分:文件区和对换区;这样,当发生缺页请求时,系统应从何处将缺页调入内存:1 系统拥有足够的对换区,可以全部从对换区调入所需页面;在进程运行前,须将有关的文件拷贝到对换区;2 系统缺少足够的对换区,这时凡是不会被修改的文件,都直接从文件区调入,由于它们未被修改而不必换出;但对于可能被修改的部分,换出时调到对换区,以后需要时,再从对换区调入;3 UNIX 方式;凡是未运行过的页面,都应从文件区调入;曾运行过但已换出的页面,放在∑==ni iS S 1m SS b ii ⨯=对换区,下次应从对换区调入;4.8 页面置换算法当进程运行时,所访问的页面不在内存而需要将他们调入内存,但内存无空闲时,需要选择一页面换出到对换区,选择算法即页面置换算法;算法评价:页面置换频率低,调出页面将不会或很少访问;4.8.1 最佳置换算法和先进先出置换算法1. 最佳Optimal 置换算法由Belady 于1966年提出的一种理论上的算法;原理:其所选择的被淘汰页面,将是以后永不使用的, 或是在最长未来时间内不再被访问的页面;特点:通常可获得最低的缺页率,但由于进程运行不可预知而无法实现,用来评价其他算法;假定系统为某进程分配了三个物理块,并考虑有以下的页面号引用串:7,0,1,2,0,3,0,4,2,3,0,3,2,1,2,0,1,7,0,1进程运行时,先将7,0,1三页装入内存;当进程要访问页面2时,将会产生缺页中断,此时OS 根据最佳置换算法,将选择页面7予以淘汰;共发生6次页面置换;图 4-25 利用最佳页面置换算法时的置换图 2. 先进先出FIFO 页面置换算法---总是置换最先进入内存的页面;用FIFO 算法共发生12次页面置换;该算法与进程的实际运行规律不相符,有些页面经常被访问全局变量,常用函数;图 4-26 利用FIFO 置换算法时的置换图4.8.2 最近最久未使用Least Recently Used LRU 置换算法1. LRU置换算法 ---在无法预测各页面将来使用情况下,利用“最近过去”作为“最近将来”的近似选择最近最久未使用的页面予以淘汰;用LRU 算法共发生9次页面置换;引用率70770170122010320304243230321201201770101页框(物理块)203图 4-27 LRU 页面置换算法2. LRU 置换算法的硬件支持LRU 算法比较好,但为了快速知道哪一页是最近最久未使用的页面,需要硬件支持:寄存器或栈;1 寄存器为了记录某进程在内存中各页的使用情况,须为每个页面配置一个移位寄存器,可表示为:原理:进程访问某物理块时,先将寄存器的Rn-1位设成1;此时,定时信号将每隔一定时间将寄存器右移一位;若将n 位寄存器的数看做是一整数,那么,具有最小数值的寄存器所对应的页面,就是最近最久未使用的页面;例:某进程在内存中有8个页面,为每页面配置一8位寄存器时的LRU 访问情况,如图4-28图 4-28 某进程具有8个页面时的LRU 访问情况2 栈--利用栈来保存当前使用的各页面的页面号;原理:每当进程访问某页面时,便将该页面的页面号从栈中移出,将它压入栈顶;因此,栈顶始终是最新被访问页面的编号,而栈底则是最近最久未使用页面的页面号;假定现有一进程所访问的页面的页面号序列为:4,7,0,7,1,0,1,2,1,2,6随着进程的访问,栈中页面号的变化情况如图4-29所示;在访问页面6时发生了缺页,此时页面4是最近最久未被访问的页,应将它置换出去;LRU 算法较好,但要求较多硬件支持, 实际使用接近LRU算法-Clock 算法;图引用率70770170122010323104430230321013201770201页框2304204230230127127011474074704170401741074210741207421074621074-29 用栈保存当前使用页面时栈的变化情况。
深入了解计算机操作系统的存储管理
深入了解计算机操作系统的存储管理计算机操作系统是计算机系统的核心组成部分,为计算机软件和硬件的协调运行提供支持。
计算机内存是计算机硬件中的重要组成部分,是计算机系统运行的基础。
在计算机操作系统中,存储管理是最基本的操作之一。
本文将深入探讨计算机操作系统中的存储管理。
一、存储管理概述在计算机操作系统中,存储管理主要包括内存分配和内存回收两个方面。
内存分配是指在计算机系统启动时,将内存分为多个块,并为进程和线程分配所需的内存,以保证它们可以正常运行;内存回收是指在进程和线程退出时,将分配给它们的内存释放给系统,以便供其他进程和线程使用。
二、内存分配技术为了更好地满足进程和线程的内存需求,计算机操作系统采用了多种内存分配技术,包括动态内存分配和静态内存分配两种。
1、动态内存分配动态内存分配是指在进程和线程运行时,根据其实际内存需求进行内存分配。
操作系统通常采用分区技术对内存进行分配,可以分为固定分区和动态分区两种。
(1) 固定分区固定分区是指将内存分为若干个固定大小的分区,每个分区只能分配给一个进程或线程使用。
由于分区大小固定,因此容易产生“内存碎片”的问题,如果分区大小过小会浪费内存,如果分区大小过大则会导致分配不均。
因此,固定分区在实际应用中并不常用。
(2) 动态分区动态分区是指将内存分为若干个不固定大小的分区,每个分区可以根据进程或线程的实际内存需求进行分配。
动态分区主要解决了固定分区的一些问题,但也会产生“内存碎片”问题。
2、静态内存分配静态内存分配是指在编译时就将内存分配给进程或线程,并在运行时不再进行内存分配。
静态内存分配主要用于一些固定的程序或数据结构上,通常不适用于通用操作系统中。
三、内存回收技术在进程或线程退出时,需要将其占用的内存释放,并返还给系统。
内存回收主要包括两种技术,分别为手动回收和自动回收。
1、手动回收手动回收是指在编写程序时,由程序员手动释放所分配的内存。
手动回收需要注意内存泄漏和悬挂指针等问题,需要程序员自己负责管理内存。
计算机操作系统实验三存储器管理
计算机操作系统实验三存储器管理引言存储器管理是计算机操作系统中非常重要的一部分。
它负责管理计算机中的存储器资源,以便有效地分配和管理内存。
在操作系统的设计和实现中,存储器管理的性能和效率对整个系统的稳定性和性能有着重要的影响。
本文档将介绍计算机操作系统实验三中的存储器管理的实验内容及相关的知识点。
我们将从内存分区管理、页式存储管理和段式存储管理三个方面进行讨论。
内存分区管理内存分区管理是一种常见的存储器管理方法,旨在将物理内存分成若干个不同大小的区域,以便为不同的进程分配内存。
在实验三中,我们将学习和实现两种内存分区管理算法:首次适应算法和最佳适应算法。
首次适应算法是一种简单直观的算法,它从内存的起始位置开始查找第一个满足要求的空闲分区。
而最佳适应算法则是通过遍历整个内存空间,选择最合适的空闲分区来满足进程的内存需求。
通过实验,我们将学习如何实现这两种算法,并通过比较它们的性能和效果来深入理解内存分区管理的原理和实现。
页式存储管理页式存储管理是一种将物理内存分成固定大小的页框(page frame)和逻辑地址分成固定大小的页面(page)的管理方法。
在操作系统中,虚拟内存通过将进程的地址空间划分成大小相等的页面,并与物理内存中的页框相对应,实现了大容量的存储管理和地址空间共享。
在实验三中,我们将学习和实现页式存储管理的基本原理和算法。
我们将了解页表的结构和作用,以及如何通过页表将逻辑地址转换为物理地址。
此外,我们还将学习页面置换算法,用于处理内存不足时的页面置换问题。
段式存储管理段式存储管理是一种将逻辑地址分成不同大小的段并与物理内存中的段相对应的管理方法。
在操作系统的设计中,段式存储管理可以提供更灵活的地址空间管理和内存分配。
实验三将介绍段式存储管理的基本原理和实现方法。
我们将学习段表的结构和作用,以及如何通过段表将逻辑地址转换为物理地址。
同时,我们还将探讨段的分配和释放过程,并学习如何处理外部碎片的问题。
操作系统-存储管理
操作系统-存储管理操作系统-存储管理一、引言存储管理是操作系统中重要的组成部分,它负责管理计算机系统中的存储器资源。
存储管理的任务包括内存分配、内存保护、内存回收等,通过有效的存储管理可以充分利用系统的存储资源,提高系统的运行效率和性能。
二、内存层次结构1、主存储器主存储器是计算机系统中最主要的存储器,它用于存放正在运行的程序和数据,是CPU直接访问的存储器。
主存储器一般被划分为若干个固定大小的块,每个块被称为一页,每一页可以存放一个进程的一部分或全部。
2、辅助存储器辅助存储器是主存储器的扩展,主要用于存储大容量的数据和程序。
辅助存储器包括硬盘、磁带等设备,其访问速度比主存储器慢,但容量较大。
三、内存管理1、内存分配方式a:静态分配静态分配是指在程序运行之前,就确定了程序在内存中的位置。
静态分配的优点是简单高效,但是会浪费存储资源。
b:动态分配动态分配是指程序在运行时,根据需要动态分配内存。
动态分配的优点是灵活高效,但是需要额外的内存管理开销。
2、内存管理算法a:首次适应算法首次适应算法是按照内存块的起始地质逐一查找,找到第一个大小大于等于要求的空闲的内存块进行分配。
b:最佳适应算法最佳适应算法是在所有满足要求的内存块中选择大小最小的内存块进行分配。
c:最差适应算法最差适应算法是在所有满足要求的内存块中选择大小最大的内存块进行分配。
3、内存保护内存保护是指通过访问权限控制,确保每个进程只能访问自己分配的内存空间,防止进程之间的干扰。
4、内存回收内存回收是指当进程不再使用某些内存空间时,将其释放给系统以便后续的内存分配。
内存回收可以通过标记清除算法、引用计数算法等方式实现。
四、虚拟内存管理1、虚拟内存机制虚拟内存是一种扩展的内存管理技术,它通过将部分程序或数据装入主存储器,并实现从辅助存储器到主存储器的动态迁移,提高了计算机系统的运行性能。
2、页面置换算法页面置换算法是指当主存储器已满时,需要置换出某些页面到辅助存储器中,以便为新的页面腾出空间。
操作系统磁盘存储器的管理
文件保护
➢ 保护域
➢ 进程和域间的静态联系 • 进程和域之间一一对应 • 在进程的整个生命期中,其可用资源是固定 的 • 称为静态域 • 进程运行的全过程都是受限于同一个域,这 将会使赋予进程的访问权超过实际需要
文件保护
➢ 保护域
➢ 进程和域间的动态联系 • 进程和域之间一多对应 • 将进程的运行分为若干个阶段,每个阶段联 系一个域 • 应增设保护域切换功能
对象 F1
域
D1 O,E
D2
D3 E
F2 F3
W
R*,O R*,O, W
对象 F1
域
D1 O,E
D2
D3
F2 F3
O,R*, R*,O, W* W
W
W
文件保护
➢ 访问矩阵的修改
➢ 拷贝权和所有权都是用于改变矩阵内同一列的各 项访问权,或者说,是用于改变在不同域中运行 的进程对同一对象的访问权
文件保护
1) 双份目录和双份文件分配表
2) 热修复重定向和写后读校验
(1) 热修复重定向(Hot-Redirection)。 系统将磁盘容量的很小一部分作为热修复重定向区, 用于存放当发现磁盘有缺陷时的待写数据
➢ 磁盘高速缓存的形式
(1) 在内存中开辟一个单独的存储空间来作为 磁盘高速缓存,其大小是固定的,不会受应用 程序多少的影响;
(2) 把所有未利用的内存空间变为一个缓冲池, 供请求分页系统和磁盘I/O时(作为磁盘高速缓 存)共享。
提高磁盘I/O速度的途径
➢ 磁盘高速缓存(Disk Cache)
➢ 数据交付方式
NTFS
1、NTFS新特征 64位地址 可以很好地支持长文件名 具有系统容错功能 能保证系统中的数据一致性 2、磁盘组织 分区称为卷 NTFS以族为磁盘空间分配和回收的基本单位,又 称为卷因子。
操作系统实验报告三存储器管理实验
操作系统实验报告三存储器管理实验操作系统实验报告三:存储器管理实验一、实验目的本次存储器管理实验的主要目的是深入理解操作系统中存储器管理的基本原理和方法,通过实际操作和观察,掌握内存分配与回收的算法,以及页面置换算法的工作过程和性能特点,从而提高对操作系统资源管理的认识和实践能力。
二、实验环境本次实验使用的操作系统为 Windows 10,编程语言为 C++,开发工具为 Visual Studio 2019。
三、实验内容1、内存分配与回收算法实现首次适应算法(First Fit)最佳适应算法(Best Fit)最坏适应算法(Worst Fit)2、页面置换算法模拟先进先出页面置换算法(FIFO)最近最久未使用页面置换算法(LRU)时钟页面置换算法(Clock)四、实验原理1、内存分配与回收算法首次适应算法:从内存的起始位置开始,依次查找空闲分区,将第一个能够满足需求的空闲分区分配给进程。
最佳适应算法:在所有空闲分区中,选择能够满足需求且大小最小的空闲分区进行分配。
最坏适应算法:选择空闲分区中最大的分区进行分配。
2、页面置换算法先进先出页面置换算法:选择最早进入内存的页面进行置换。
最近最久未使用页面置换算法:选择最近最长时间未被访问的页面进行置换。
时钟页面置换算法:给每个页面设置一个访问位,在页面置换时,从指针指向的页面开始扫描,选择第一个访问位为0 的页面进行置换。
五、实验步骤1、内存分配与回收算法实现定义内存分区结构体,包括分区起始地址、大小、是否已分配等信息。
实现首次适应算法、最佳适应算法和最坏适应算法的函数。
编写测试程序,创建多个进程,并使用不同的算法为其分配内存,观察内存分配情况和空闲分区的变化。
2、页面置换算法模拟定义页面结构体,包括页面号、访问位等信息。
实现先进先出页面置换算法、最近最久未使用页面置换算法和时钟页面置换算法的函数。
编写测试程序,模拟页面的调入和调出过程,计算不同算法下的缺页率,比较算法的性能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
存储器管理(固定分区、可变分区与分页式分配算法)一、目的本课题实验的目的是,使学生实验存储器管理系统的设计方法;加深对所学各种存储器管理方案的了解;要求采用一些常用的存储器分配算法,设计一个存储器管理模拟系统并调试运行。
二、实验内容模拟固定分区分内存的动态分配和回收,并编程实现。
三、要求及提示(1)建立相关的数据结构,作业控制块、已分配分区及未分配分区(2)实现一个固定分区分配算法(实现多个分区只设置一个后备作业队列, 而每个分区设置一个后备作业队列 ,留给大家实现)(3)实现一个分区回收算法(4)要求采用一种常用的存储器分配算法,设计一个存储器管理模拟系统。
允许进行多次的分配和释放,并可向用户反馈分配和释放情况及当前内存的情况;采用“命令菜单”选择和键盘命令输入的会话方式,根据输入请求调用分配模块,或回收模块,或内存查询模块,或最终退出系统。
(5)编程实现。
(6)工具:C语言或其它高级语言四、实验报告1、列出调试通过程序的清单,并附上文档说明。
2、总结上机调试过程中所遇到的问题和解决方法及感想。
五参考代码:// memdos.cpp : 定义控制台应用程序的入口点。
//以下代码为4种分区,8K分区四块,16K分区3块,32分区2块, 64分区1块, 共10块#include "stdafx.h"#include <string.h>#include <stdlib.h>//#include <conio.h>#define TRUE 1#define FALSE 0void InitCSolid( );void ExitSolid();int MallocArea(int nSize,char* sName);//申请一个分区函数int FreeArea(char *sName); //释放一个分区函数void ShowArea( );//显示所有分区状态函数{char *pmem; //每分区内存的起始地址int size; // 每分区的大小int useSize; //已使用大小,若为0 ,表示此分区尚未使用char jobName[20]; //此分区的作业(进程)名};int nSizes[4];//共4种分区,每种分区的大小为 8k,16k,32k,64k ,每K为1024字节char *pmems; //起始分区内存地址Solid *psolids;int snum; //定义总的内存分区数int main( ){int jobCount=1; //已申请的作业个数char str[100];char jobName[14];int nSize; //申请的作业大小InitCSolid( ); //初始化数据while(1){ShowArea( ); //显示内存的分配与使用情况printf(" 固定分区内存管理\n x退出 1申请内存 2释放内存\n");scanf("%s",str);if(strlen(str)!=1) continue;if(str[0]=='x' || str[0]=='X')break; //退出if(str[0]=='1') //申请内存while(1){printf("请输入申请内存的大小 (按x退出,按0返回上一级): ");scanf("%s",str);if(strlen(str)==1){if(str[0]=='x' || str[0]=='X')goto exit; // 退出if(str[0]=='0')break; //返回上一级}nSize=atoi(str);//获取申请的内存大小 (atoi函数功能为字符串转换成数字类型)if(nSize<=0) { printf("输入错误! ");continue;}sprintf(jobName,"作业%03d",jobCount); //自动定义一个作业名if( !MallocArea(nSize,jobName)) //分配内存,并判断是否成功{printf( "申请内存大小为%d,但没有空间可分配,请重新输入\n",nSize);}jobCount++; //已申请的作业个数ShowArea(); //显示内存的分配与使用情况}if(str[0]=='0')continue; //返回上一级}if(str[0]=='2') //释放内存{printf("请输入释放内存的作业名 (按x退出,按0返回上一级): ");while(1)scanf("%s",str);if(strlen(str)==1){if(str[0]=='x' || str[0]=='X')goto exit; // 退出if(str[0]=='0')break; //返回上一级}if(strlen(str)==3)sprintf(jobName,"作业%s",str); //获取作业名else strcpy(jobName,str);if(FreeArea(jobName)) //根据作业名释放内存,并判断是否释放成功{printf("已释放%s所占用的内存\n\n\n",str);ShowArea();printf("请输入释放内存的作业名 (按x退出,按0返回上一级): ");}else printf("无此作业,请重新输入释放内存的作业名 (按x退出,按0返回上一级): ");}if(str[0]=='0')continue;}}exit:ExitSolid(); //释放资源////getchar();return 0;}void InitCSolid( ) //生成初始数据{//this->snum=sNum;int i,ntotalSize=0;snum=10; //总共分成10分区psolids=(Solid *)malloc(sizeof(Solid)*snum); //new Solid[snum];//申请堆内存nSizes[0]=8192;nSizes[1]=16384;nSizes[2]=32768;nSizes[3]=65536; //nSizes[4]=165536;psolids[0].size=nSizes[0]; psolids[0].useSize=0; //其中8K分区4块,并设置其大小与使用标志为0, 表示未使用psolids[1].size=nSizes[0]; psolids[1].useSize=0;psolids[2].size=nSizes[0]; psolids[2].useSize=0;psolids[3].size=nSizes[0]; psolids[3].useSize=0;psolids[4].size=nSizes[1]; psolids[4].useSize=0; //其中16K分区3块psolids[5].size=nSizes[1]; psolids[5].useSize=0;psolids[6].size=nSizes[1]; psolids[6].useSize=0;psolids[7].size=nSizes[2]; psolids[7].useSize=0;//其中32K分区2块psolids[8].size=nSizes[2]; psolids[8].useSize=0;psolids[9].size=nSizes[3]; psolids[9].useSize=0; //其中64K分区1块for(i=0;i<snum;i++)ntotalSize+=psolids[i].size; //获取总的内存大小pmems=(char *)malloc(ntotalSize);psolids[0].pmem=pmems; //设置每分区的起始地址for(i=1;i<snum;i++){psolids[i].pmem=psolids[i-1].pmem +psolids[i-1].size;}}void ExitSolid() //释放// delete []psolids;free(psolids);//释放内存free(pmems);}//申请内存函数,参数nrSize为要申请的内存大小,参数sName为申请的作业名称,申请成功返回TRUE, 否则返回FALSEint MallocArea(int nrSize,char *sName){int i;for(i=0;i<4;i++){if(nrSize>nSizes[i]) continue; //根据要申请的nrSize内存大小,判断落在哪个分区(8k,16k,32k,64k分区)break;}if(i==4) return false; //申请的nrSize内存太大,没有大内存分配int n=i; //记住要分配的分区//循环查找可用分区for(i=0;i<snum;i++){if(psolids[i].size<nSizes[n]) //找出分区位置continue;if(psolids[i].useSize!=0) //此分区块已分配出去否?continue; //是,寻找下一分区块psolids[i].useSize=nrSize; //否,分配此块分区strcpy(psolids[i].jobName,sName);//保存作业名}if(i==snum)return FALSE; //申请不成功return TRUE;//申请成功}//根据作业名释放内存,找到作业名并成功释放返回TRUE ,否则返回FALSEint FreeArea(char *sName){int i;for(i=0;i<snum;i++){if( strcmp(sName,psolids[i].jobName)==0) //是否由此作业名?if(psolids[i].useSize!=0){psolids[i].useSize=0; //是 ,释放内存,即设置此块分区为未使用 return TRUE;}}return FALSE;}void ShowArea( )//显示{int i=0;printf("\n");for(i=0;i<snum;i++) //循环显示每一块分区的状态{if(psolids[i].useSize==0) //此分区块是否已使用printf("空闲区间起始地址%dK \t内存大小%dK\n", (psolids[i].pmem - psolids[0].pmem)/1024 ,psolids[i].size/1024 );}else { //是printf("%s 起始地址%dK \t内存大小%dK 已使用%dK%d字节\n",psolids[i].jobName, (psolids[i].pmem - psolids[0].pmem)/1024, psolids[i].size/1024,psolids[i].useSize/1024,psolids[i].useSize%1024 );}}printf("\n");}。