激光干涉测长
激光干涉测长的基本原理
激光干涉测长的基本原理
激光干涉测长是一种非接触式测量方法,其基本原理如下:
1. 使用激光器产生一束单色、相干、窄束的激光。
2. 将激光分为两束,分别称为参考光和测量光。
参考光经过一个反射镜反射,与测量光相向而行。
3. 测量光照射到被测对象上,经过反射后再次与参考光相遇。
4. 参考光和测量光在相遇的地方形成干涉条纹。
这是因为两束光波相干叠加时,会出现干涉现象。
5. 干涉条纹的形态和幅度受到测量光程的影响。
测量光程是测量光从激光器出射到被测对象反射回来的总路程,包括参考光程和被测对象的光程。
6. 通过观察干涉条纹的形态和移动的情况,可以确定测量光程变化的大小,从而计算出被测对象的长度或距离。
激光干涉测长具有高精度、高分辨率、快速响应等特点,广泛应用于工业制造、科学研究、精密测量等领域。
激光原理与技术--第六章 激光在精密测量中的应用
半波长的奇数倍时----- 出现明纹。
21
我们把k =士1的两个暗点之 间的角距离作为中央明纹的 角宽度.中央明纹的半角宽度
Δθ0≈λ∕a
◆暗纹中心位置公式:
◆明纹中心位置公式:
明纹 暗纹
◆光强分布公式:
单缝衍射测量仪器示意图
4
6.1.2 激光干涉测长系统的组成
除了迈克尔孙干涉仪以外,激光干涉测长系统还包括激光光源、可移 动平台、光电显微镜、光电计数器、显示记录装置
7.干涉条纹计数时,通过移相获得两路相差π/2的干涉条纹的光强信号, 该信号经放大,整形,倒向及微分等处理,可以获得四个相位依次相差π/2 的脉冲信号(图6-5)。
图6-2 反射器
3
6.1.2 激光干涉测长系统的组成
5.激光干涉仪的典型光路布局有使用角锥棱镜反射器的光路布局,如图6-3示。
图6-3 典型光路布局
6. 移相器也是干涉仪测量系统的重要组成部分。常用的移相方法有机械移相(图6-4), 翼形板移相,金属膜移相和偏振法移相。
图6-4 机械法移相原理图
13
基本原理
The Michelson interferometer is shown in Figure 1. The basic optical path of laser interferometer length measurement is a Michelson interferometer, and this makes use of interference fringes ,which are the traces of points owing the same path difference, to reflect the information of measured object. It uses the partially reflecting element P to divide the light from laser source into two mutually coherent beams which are reflected by M1 and M2 .The output intensity of an interferometer is a periodic function of the length difference between the measuring path and the reference path of the interferometer. Typical length measurements with a laser interferometer are performed by moving one reflector of the interferometer along a guideway and counting the periodic interferometer signal, e.g. the interference fringes. These results are unambiguous as long as the length difference between two consecutive measurements is within λ/2. Interpolation of the fringes can lead to a resolution of the length measurement below 1nm. The bright fringes occur when the path difference is kλ and the dark fringes when it is (k+1/2)λ,where k is any integer.
激光干涉测量技术

式中,λ0为激光光波中心波长
4
2019/10/14
测得干涉条纹的变化次数K之后,即可由上式求得被测 长度L。在实际测量中,采用干涉条纹计数法,测量开始 时使计数器置零,测量结束时计数器的示值即为与被测长 度L相对应的条纹数K。可把上式改写为
式中, λ=λ0/n, λ是激光光波在空气中的波长。
激光干涉测长仪的主要结构
18光强接近一致以提高对比度。
2019/10/14
金属膜移相光路图
机械法移相原理图
19
2019/10/14
(4)分偏振法移相 右图是分 偏振法移相的光路图。输入光 束是与垂直入射面成45◦角的 平面偏振光,由分光器和活动 反射器反射后,信号光束的输 出还是45◦的平面偏振光,因 此,它的垂直和水平分量位相 相同。在参考光路中加入1/4 波片后使参考光变成圆偏振光, 它的垂直和水平分量位相差为 90◦光束会合后用一个渥拉斯 顿棱镜使垂直分量和水平分量 分开,给出两个干涉条纹,它 们的位相差为90◦
• 激光光源:它一般是采用单模的He-Ne(同位素)气体激光器, 输出的是波长为0.6328微米的红光。为提高光源的单色性, 对激光器要采取稳频措施;
• 迈克尔逊干涉仪:由它来产生干涉条纹;(核心部件) • 可移动平台:它携带着迈克尔逊干涉仪的一块反射镜和待测
物体一起沿入射光方向平移。由于它的平移,使干涉仪中的 干涉条纹移动; • 光电计数器:其作用是对干涉条纹的移动进行计数; • 显示和记录装置:其作用是显示和记录光电计数器中记下的 干涉条纹移动的个数或与之对应的长度;
1.立方体分光器;2.移动反射镜
13
2019/10/14
(3)光学倍频布局 为提高干涉仪的灵敏度,可使用光学倍频 (也称光程差放大器)的棱镜系统,如下图所示。角锥棱镜Ml每移 动kλ/2干涉条纹便发生一次明暗交替变化,k为倍频系数,图中k =6。利用光学倍频的干涉系统能用简单的脉冲计数做精密测量, 而无需进行条纹细分,这种技术还可使干涉仪结构紧凑,减小 温度、空气及机械干扰的影响。
激光测长的原理及应用
激光测长的原理及应用1. 引言激光测长是一种非接触式测量方法,通过利用激光束与测量对象之间的相互作用,实现测量目标的长度、距离或位移。
本文将介绍激光测长的原理以及其在各个领域的应用。
2. 原理激光测长的原理基于光的干涉和散射效应。
当一束激光照射在目标上时,部分光会被目标表面散射,并返回到激光发射器。
利用光的干涉原理,我们可以测量出光束在发射和接收之间的相位差,从而得出目标的长度、距离或位移。
3. 应用激光测长在许多领域都有广泛的应用,下面列举了几个典型的应用场景:3.1 工业自动化激光测长在工业自动化中被广泛应用于长度、宽度和位置的测量。
例如,在生产线上,激光测长可以用于测量产品的尺寸,确保产品符合规定的标准。
此外,在机器人操作中,激光测长也可以用于测量机器人末端执行器的位移,以实现精准的操作。
3.2 航天航空激光测长在航天航空领域具有重要的应用价值。
例如,在航天器的发射过程中,激光测长可以用于测量航天器与发射台之间的间距。
此外,在飞行器的导航和定位过程中,激光测长也可以用于测量与地面或其他物体的距离,提供精确的定位信息。
3.3 医学影像激光测长在医学影像领域有着广泛的应用。
例如,在眼科手术中,激光测长可以用于测量患者眼球的曲率半径,帮助医生选择合适的人工晶体。
此外,激光测长还可以用于检测体内器官的大小和形状,提供重要的医学诊断依据。
3.4 地质勘探激光测长在地质勘探领域也有广泛的应用。
例如,在地震勘探中,激光测长可以用于测量地震波传播的时间和距离,帮助科学家确定地下地质结构。
此外,在矿山勘探中,激光测长还可以用于测量矿石的厚度和位置,提供宝贵的矿藏信息。
3.5 建筑测量激光测长在建筑测量领域被广泛应用于定位、测量和绘制。
例如,在建筑施工中,激光测长可以用于测量地面的高度差,帮助工程师进行精确的设计和施工。
此外,在建筑勘测中,激光测长还可以用于测量建筑物的墙面、屋顶和地基等尺寸,提供准确的测量数据。
第三章、激光干涉测量
第三章、激光干涉测量干涉测量技术是以光波干涉原理为基础进行高精密测量的一门技术。
20世纪60年代激光的出现,才使干涉测量技术得到了长足的发展。
因为激光出现以前,所用以光源单色灯经过滤光片滤光作为单色光源,其相干长度只有几mm ,且干涉条纹比较模糊,只能微小变化的测量。
激光的出现,由于激光束的高亮度和很长的相干长度(He-Ne 激光器,相干长度几十Km ),使得干涉测量的测量精度、可测量长度都有了质的提高。
激光干涉测量的应用范围很广,可用于长度、位移、角度、形状、介质折射率(通过折射率的变化还可以测量压力、温度等)变化。
激光干涉测量的原理就是将入射激光束分成两束,一束为参考光束,一束为测量光束,测量两束光的光程差的信息或n l kl n l n M j j j N i i i ⇒=-=∆∑∑==211λ。
本章主要介绍激光干涉长度测量、激光干涉微小间隙测量以及光纤干涉传感器所构成的温度、压力测量。
首先介绍激光干涉长度测量。
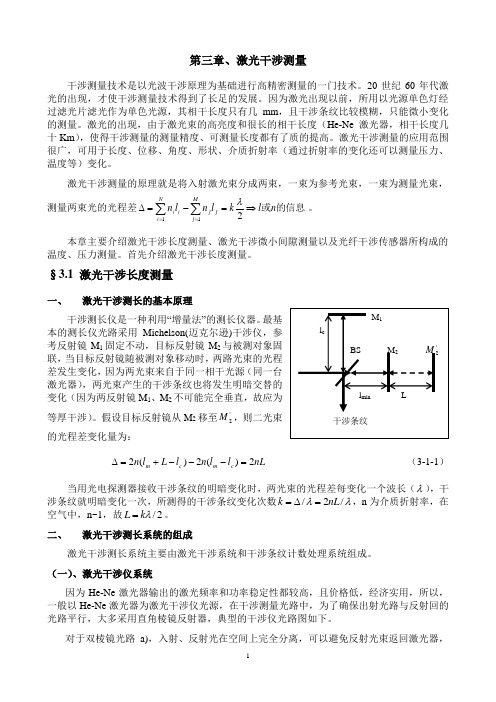
§3.1 激光干涉长度测量一、 激光干涉测长的基本原理干涉测长仪是一种利用“增量法”的测长仪器。
最基本的测长仪光路采用Michelson(迈克尔逊)干涉仪,参考反射镜M 1固定不动,目标反射镜M 2与被测对象固联,当目标反射镜随被测对象移动时,两路光束的光程差发生变化,因为两光束来自于同一相干光源(同一台激光器),两光束产生的干涉条纹也将发生明暗交替的变化(因为两反射镜M 1、M 2不可能完全垂直,故应为等厚干涉)。
假设目标反射镜从M 2移至'2M ,则二光束的光程差变化量为:nL l l n l L l n c m c m 2)(2)(2=---+=∆ (3-1-1) 当用光电探测器接收干涉条纹的明暗变化时,两光束的光程差每变化一个波长(λ),干涉条纹就明暗变化一次,所测得的干涉条纹变化次数λλ/2/nL k =∆=,n 为介质折射率,在空气中,n~1,故2/λk L =。
激光在长度计量中的应用

激光在长度计量中的应用摘要:随着时代的发展与科学技术水平的提高,激光技术取得了很大程度的发展,在各个领域都有了较为广泛的应用,长度计量便是激光技术应用的重要表现之一。
近年来,电子技术与计算机技术的发展,又将激光技术在长度计量中的应用提升到一个新的层次。
相比于传统的测量方法,激光测量具有高灵敏度、高精度、现代化的特点,优势明显,为我国工业水平的提升做出一定贡献。
本文就针对激光在长度计量中的应用进行研究与分析。
关键词:激光技术;长度计量;干涉测长;位移测量;应用1.激光干涉测长的原理对于激光干涉测长技术而言,它是通过干涉条纹来对被测信息进行一定程度的反映。
以迈克尔逊干涉仪为例,干涉条纹指的是一条轨迹,这一轨迹是仪器接收面上光程差相同的点相连而成。
激光器发出光束,在到达半透半反射镜之后,原先的光束被一分为二。
在行进过程之中,如果两道光束的光程相差激光半波长的偶数倍,它们之间会构成一个互相加强的关系,条纹为亮条纹;而如果是奇数倍时,它们只见的关系又会变成相互抵消,进而形成暗条纹。
两条光束的光程差可用如下公式表示:在上述公式中,n指的是光路介质折射率;l指的是光路的几何路程。
运用干涉仪测量物体时,把对象物体与其中一支光路相连,然后移动反光镜,时期保持与光束移动方向一致。
在这一过程中,反光镜每移动半波长,相应光束的光程便改变了一个波长,这样一来,干涉条纹会随之发生明暗变化,且变化过程是周期性的。
上述操作完成之后,就可以对干涉条纹的变化进行测量,进而得到所需的长度参数。
测量基本方程为:在这一基本方程中,L指的是被测长度;N指的是干涉条纹变化次数;指的是光源波长。
获得长度参数后,还需要进行进行误差分析。
公式为这一公式又可以被记作:这一公式中,为被测长度的相对误差;为干涉条纹变化计数的相对误差;为波长相对误差。
也就是说,被测长度的相对误差主要是由干涉条纹计数与波长的相对误差两部分组成。
对于干涉条纹计数相对误差而言,它一般来自于系统设计方面的问题;而造成波长相对误差的原因有很多,一方面来自于激光稳频技术,另一方面则会受到湿度、温度、气压等外部环境的控制情况影响。
使用激光干涉仪进行长度测量的技巧与注意事项

使用激光干涉仪进行长度测量的技巧与注意事项激光干涉仪是一种常用的精密测量设备,广泛应用于科技研究、工程测量和制造领域。
它通过使用激光干涉原理,可以实现高精度的长度测量。
然而,使用激光干涉仪进行测量并非易事,需要掌握一些技巧和注意事项。
本文将介绍一些常用的技巧与注意事项,以帮助读者正确地使用激光干涉仪进行长度测量。
首先,在使用激光干涉仪进行测量前,要确保仪器处于良好的工作状态。
检查激光源是否正常工作,激光束是否稳定,以及干涉信号是否清晰。
如果有异常情况,需要及时修复或更换设备。
此外,应在使用过程中避免仪器受到撞击和振动,以免影响测量结果的精确性。
其次,在进行测量时,要注意调节测量系统的各项参数。
首先,要调整光源的功率和聚焦距离,使激光束能够精确照射到被测物体上。
然后,根据被测物体的特点选择合适的测量范围和放大倍数,以确保干涉信号的清晰可见。
此外,还需要调整干涉仪的分束板和叠加板,使干涉图样对称清晰,以便准确地读取测量结果。
在进行测量时,还需要注意环境因素对测量结果的影响。
激光干涉仪对温度和空气流动比较敏感,因此应尽量在稳定的温度条件下进行测量,并避免有风的地方。
此外,需要注意避免干扰源的存在,如强光和电磁场等,因为这些干扰源可能会导致干涉信号的变化,从而影响测量的准确性。
另外,为了获得更准确的测量结果,可以采取一些提高精度的措施。
首先,测量前应对被测物体进行清洁,以避免因灰尘或污渍对测量结果产生误差。
其次,可以采用多点测量的方法,将多个测量值取平均,以降低随机误差的影响。
此外,可以通过对比和校准的方式,确定测量系统的零点,从而提高测量的绝对精度。
最后,使用激光干涉仪进行测量时,要注意数据的处理和分析。
首先,要合理选择数据采集的频率和时间间隔,以充分反映被测物体的变化情况。
其次,对于连续变化的信号,可以进行插值或拟合处理,以获得更精确的测量结果。
最后,要注意对测量结果进行误差分析,评估测量的精确性和可靠性,并及时修正和改进测量的方法和装置。
激光干涉测长技术
8
辩向干涉系统 如图所示为泰曼——格林型旳偏振干涉系统,其特点是用一偏振分束 器替代常规旳分束板,并在干涉仪旳不同部位安顿了某些不同旳偏振器件 (在照明系统中安顿一1/2波片,在参照光路和测量光路中各安顿一1/4波 片,而在接受部分安顿一检偏振器)。图中由He-Ne激光器输出旳线偏振 光入射到1/2波片上,1/2波片能够绕光轴旋转,以使经它出射旳偏振光振 动方向定位在任何所需旳方向上。偏振分束器旳作用是把输入旳偏振光按 偏振方向分束,使测量光束和参照光束偏振方向相互垂直。
3、2、4 、1 ;反向移动时,脉冲排列顺序为1 、 4、2、3、 1,如
图所示。在逻辑电路上可根据脉冲1旳背面是1或4来鉴别正向加脉冲 或反向减脉冲,并分别逆入加脉冲旳“门”或减脉冲旳“门”中去, 从而可得到总旳加脉冲或减脉冲信号。
判向电路除提升了仪器旳 抗干扰能力外,还把一种周期 旳干涉条纹变化(即亮暗变化 一次)变成四个脉冲输出信号。 所以在测长时,当条纹变一条 时,可逆计数器显示4个脉冲 数,这等于把条纹4细分了, 常称四倍频计数。此时每一脉 冲代表λ/8旳移动量,所测得 旳长度
第六章 激光干涉测长技术
自从1823年杨氏(Thomas Young)首先用试验措施研究光 旳干涉现象以来,对光干涉旳本质及其应用研究已延续近223 年旳历史。激光旳出现和计算机技术,微电子技术旳发展给光 干涉技术注入了新旳活力,并已成为当代光学中一种主要旳分 支。激光干涉测量技术不但被广泛用于对物体长度、角度、形 状、位移等几何量旳测量,还可利用其测量原理对物理量(如 形变、速度、振动等)及光学系统特征(如象差,光学传递函 数)等进行测量。
(2)析光镜上经常产生非期望光线。
析光板产生旳非期望光线
● 动条纹:除了在析光板镀膜面上分裂而成旳两条期望旳相干 光线1、2处,还可能产生光线3和4,其光强虽代于前者,若所形成条 纹旳间隔合适还是足以觉察出来,它和期望旳干涉图样一样,也会伴 随反射镜旳平移而运动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
迈克尔逊干涉仪
在干涉过程中,如果两束光的光程差是光波长的整数倍(0,1,2……),在光检测器上得到的是相长的干涉信号;如果光程差是半波长的奇数倍(0.5,1.5,2.5……),在光检测器上得到的是相消的干涉信号。
当两面平面镜严格垂直时为等倾干涉,其干涉光可以在屏幕上接收为圆环形的等倾条纹;而当两面平面镜不严格垂直时是等厚干涉,可以得到以等厚交线为中心对称的直等厚条纹。
在光波的干涉中能量被重新分布,相消干涉位置的光能量被转移到相长干涉的位置,而总能量总保持守恒。
19世纪末人们通过使用气体放电管、滤色镜、狭缝或针孔成功得到了迈克耳孙干涉仪的干涉条纹,而在一个版本的迈克耳孙-莫雷实验中采用的光源是星光。
星光不具有时间相干性,但由于其从同一个点光源发出而具有足够好的空间相干性,从而可以作为迈克耳孙干涉仪的有效光源。
激光切割
激光笔
双频激光干涉仪
马赫-曾德尔干涉仪
索菲干涉仪
1.仪器构造简介
实验室中最常用的迈克耳逊干涉仪,其原理图和结构图如图1和图2所示。
M1和M2是在
相互垂直的
图1
图2
两臂上放置的两个平面反射镜,其背面各有三个调节螺旋,用来调节镜面的方位;M2是固定的,M1由精密丝杆控制,可沿臂轴前后移动,其移动距离由转盘读出。
仪器前方粗动手轮分度值为10-2mm,右侧微动手轮的分度值为10-4mm,可估读至10-5mm,两个读数手轮属于蜗轮蜗杆传动系统。
在两臂轴相交处,有一与两臂轴各成45º的平行平面玻璃板P1,且在P1的第二平面上镀以半透(半反射)膜,以便将入射光分成振幅近乎相等的反射光1和透射光2,故P1板又称为分光板。
P2也是一平行平面玻璃板,与P1平行放置,厚度和折射率均与P1相同。
由于它补偿了1与2之间附加的光程差,故称为补偿板。
从扩展光源S射来的光,到达分光板P1后被分成两部分。
反射光1在P1处反射后向着M1前进;透射光2透过P1后向着M2前进。
这两列光波分别在M1、M2上反射后沿着各自的入射方向返回,最后都到达E处。
既然这两列光波来自光源上同一点O,因而是相干光,在E 处的观察者能看到干涉图样。
由于从M2返回的光线在分光板P1的第二面上反射,使M2在M1附近形成一平行于M1的虚像M΄2,因而光在迈克耳逊干涉仪中自M1和M2的反射,相当于自M1和M΄2的反射。
由此
可见,在迈克耳逊干涉仪中所产生的干涉与厚度为d的空气膜所产生的干涉是等效的。
2.实验原理
当M1和M΄2严格平行时,所得的干涉为等倾干涉。
所有倾角为i的入射光束,由M1和M΄2反射光线的光程差Δ均为
(1)
式中i为光线在M1镜面的入射角,d为空气薄膜的厚度,它们将处于同一级干涉条纹,并定位于无限远。
这时,在图1中的E处,放一会聚透镜,在其焦平面上(或用眼在E处正对P1观察),便可观察到一组明暗相间的同心圆纹。
这些条纹的特点是:
干涉条纹的级次以中心为最高。
在干涉纹中心,因i=0,由圆纹中心出现亮点的条件
(2)
得圆心处干涉条纹的级次
(3)
当M1和M′2的间距d逐渐增大时,对于任一级干涉条纹,例如第k级,必定以以其
的值来满足,故该干涉条纹向变大(变小)的方向移动,即向外扩展。
这时,观察者将看到条纹好像从中心向外“涌出”,且每当间距d增加时,就有一个条纹涌出。
反之,当间距由大逐渐变小时,最靠近中心的条纹将一个一个地“陷入”中心,且每陷入一个条纹,间距的改变亦为。
因此,只要数出涌出或陷入的条纹数,即可得到平面镜M1以波长λ为单位的移动距离。
显然,若有N个条纹从中心涌出时,则表明M1相对于M′2移远了
(4)
反之,若有N个条纹陷入时,则表明M1和M΄2移近了同样的距离。
根据(4)式,如果已知光波的波长λ,便可由条纹变动的数目,计算出M1移动的距离和干涉条纹变动的数目,便可算出光波的波长。
本次实验每组测量N取50个条纹的“涌出”或“陷入”,并在迈氏干涉仪上读出,便可知的值,则mm nm
迈克尔孙干涉仪。