精密位移量的激光干涉测量方法及实验
激光干涉仪测量步骤

激光干涉仪线性测量步骤一、做以下准备:(1)将云台所有旋钮(仰俯、摆动、平移)调至中间位置;(2)将三角架支座脚调至中间位置;(3)带5m长接线板;(4)带百分表、磁力表座、直角尺;(5)带两块水平仪,看机床工作台安装水平;(6)电脑提前开机,并打开测量软件;(7)补偿装置带进场之前提前接好;(8)两个人调光路的同时,一个人输入测量程序。
二、光路调整1. 将激光头置于三角架上,放在机床的右侧。
接电源线预热5分钟左右(激光头指示灯,红灯常亮或闪烁 绿灯常亮),预热时将激光头与电脑之间相连的数据线连接上,之后调节三角架的高低,并用水平仪将激光头调水平。
技巧:(1)大调调三角架支架腿,微调调脚架支座脚。
2)目测激光头相对于反光镜的高低,此时调整可用三角架中间升降摇把。
2. 将反射镜固定在工作台左侧。
注:(1)提前综合布局干涉镜、反光镜与激光头的位置,使它们上下左右对齐,并且反射镜尽量靠近干涉镜。
反射镜红点朝下安装。
(2)反射镜架设应满足全行程(例如:450mm)要求,并且不能和干涉镜相撞。
(3)将激光头尽可能接近工作台右侧行程限位。
技巧:(1)用直角尺将反射镜磁力表座与工作台T型槽调平行;2)用百分表将反射镜磁力表座与工作台T型槽拉平行。
3. 调整反光镜和激光头之间的光路。
(1)旋转激光器的光靶,白点朝下,使激光器发出较小的光束;(2)将机床工作台移动到激光器最近处,将一个光靶置于前端,白点朝上;(3)搬动激光头三角架,并调节三角架中间升降摇把,使激光束打到反射镜光靶白点中心;(4)移动机床X轴,使其逐渐远离激光头,观察反射镜光靶白点上的激光束,看其是否偏移出中心位置,一旦偏移出白点,则暂停机床,调整激光头云台上的水平摆动旋钮(左后侧小旋钮),使光束移动到以光靶白点为中心的水平对称位置,再调整激光头云台上的平移旋钮(左前侧大旋钮),使光束移动到光靶白点中轴线位置,然后调整三角架中间升降摇把,使光束移动到光靶白点中心位置。
实验五、精密位移量的激光干涉测量方法及实验
实验五、精密位移量的激光干涉测量方法及实验一、实验目的:1.了解激光干涉测量的原理2.掌握微米及亚微米量级位移量的激光干涉测量方法 3.了解激光干涉测量方法的优点和应用场合 二、实验原理本实验采用泰曼-格林(Twyman-Green )干涉系统,T -G 干涉系统是著名的迈克尔逊白光干涉仪的简化。
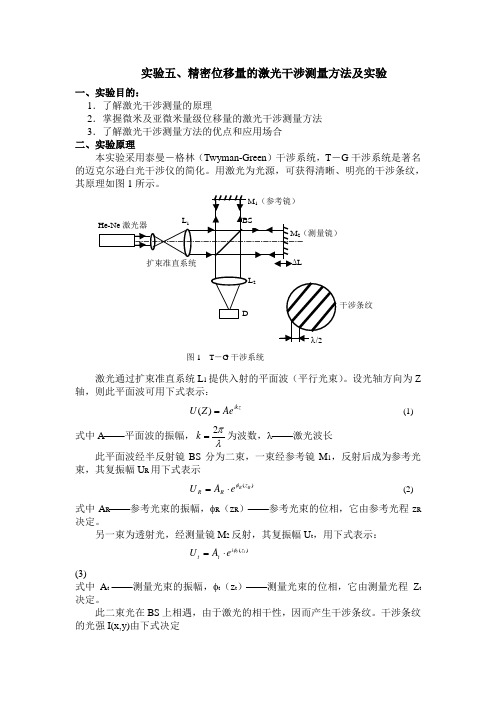
用激光为光源,可获得清晰、明亮的干涉条纹,其原理如图1所示。
图1 T -G 干涉系统激光通过扩束准直系统L 1提供入射的平面波(平行光束)。
设光轴方向为Z轴,则此平面波可用下式表示:ikz Ae Z U =)((1)式中A −−平面波的振幅,λπ2=k 为波数,λ−−激光波长此平面波经半反射镜BS 分为二束,一束经参考镜M 1,反射后成为参考光束,其复振幅U R 用下式表示)(R R z R R e A U φ⋅=(2)式中A R −−参考光束的振幅,φR (z R )−−参考光束的位相,它由参考光程z R 决定。
另一束为透射光,经测量镜M 2反射,其复振幅U t ,用下式表示:)(t t z i t t e A U φ⋅=(3)式中A t −−测量光束的振幅,φt (z t )−−测量光束的位相,它由测量光程Z t 决定。
此二束光在BS 上相遇,由于激光的相干性,因而产生干涉条纹。
干涉条纹的光强I(x,y)由下式决定*⋅=U U y x I ),((4)式中***+=+=t R t R U U U U U U ,,而U*,U R *,U t *为U ,U R ,U t 的共轭波。
当反射镜M 1与M 2彼此间有一交角2θ,并将式(2),式(3)代入式(4),且当θ较小,即sin θ≅θ时,经简化可求得干涉条纹的光强为:)2cos 1(2),(0θkl I y x I +=(5)式中I 0−−激光光强,l −−光程差,t R z z l -=。
式(5)说明干涉条纹由光程差l 及θ来调制。
当θ为一常数时,干涉条纹的光强如图22λ⋅=N l (6) 式中N −−干涉条纹数因此,记录干涉条纹移动数,已知激光波长,由式(6)即可测量反射镜的位移量,或反射镜的轴向变动量∆L 。
精密位移量的激光干涉测量方法及实验
精密位移量的激光干涉测量方法及实验一、实验目的:1. 了解激光干涉测量的原理2. 掌握微米及亚微米量级位移量的激光干涉测量方法 3. 了解激光干涉测量方法的优点和应用场合二、实验原理本实验采用泰曼-格林(Twyman-Green )干涉系统,T -G 干涉系统是著名的迈克尔逊白光干涉仪的简化。
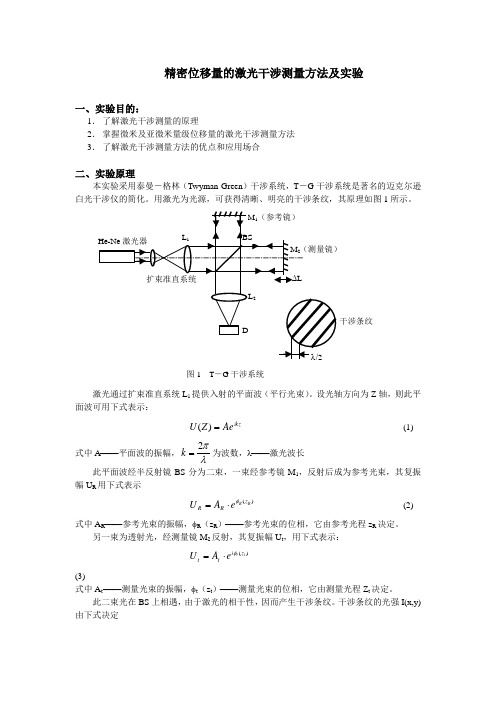
用激光为光源,可获得清晰、明亮的干涉条纹,其原理如图1所示。
图1 T -G 干涉系统激光通过扩束准直系统L 1提供入射的平面波(平行光束)。
设光轴方向为Z 轴,则此平面波可用下式表示:ikz Ae Z U =)((1)式中A −−平面波的振幅,λπ2=k 为波数,λ−−激光波长此平面波经半反射镜BS 分为二束,一束经参考镜M 1,反射后成为参考光束,其复振幅U R 用下式表示)(R R z R R e A U φ⋅=(2)式中A R −−参考光束的振幅,φR (z R )−−参考光束的位相,它由参考光程z R 决定。
另一束为透射光,经测量镜M 2反射,其复振幅U t ,用下式表示:)(t t z i t t e A U φ⋅=(3)式中A t −−测量光束的振幅,φt (z t )−−测量光束的位相,它由测量光程Z t 决定。
此二束光在BS 上相遇,由于激光的相干性,因而产生干涉条纹。
干涉条纹的光强I(x,y)由下式决定*⋅=U U y x I ),( (4)式中***+=+=t R t R U U U U U U ,,而U*,U R *,U t *为U ,U R ,U t 的共轭波。
当反射镜M 1与M 2彼此间有一交角2θ,并将式(2),式(3)代入式(4),且当θ较小,即sin θ≅θ时,经简化可求得干涉条纹的光强为:)2cos 1(2),(0θkl I y x I += (5)式中I 0−−激光光强,l −−光程差,t R z z l -=。
式(5)说明干涉条纹由光程差l 及θ来调制。
当θ为一常数时,干涉条纹的光强如图2所示。
激光干涉测量技术
(4)“猫眼”反射器 如下图(c)所示,它由一个透镜L和一个 凹面反射镜M组成、反射镜放在透镜的主焦点上,从左边来的 入射光束聚焦在反射镜上,反射镜又把光束反射到透镜,并 沿与入射光平行的方向射出(与反射镜的曲率无关)。若反别 镜的曲率中心C’和透镜的中心C重合,那么当透不影响偏振光的传输。在光程不长的情况下也可考 虑用平面反射镜代替凹面反射镜,这样更容易加工和调整。
20
偏振光学与器件
光是横波,电矢量的振动在垂直于传播方 向的平面内 自然光
没有优势方向 自然光的分解
偏振光的获得是光学应用的基础
21
偏振光学与器件
向 传播方
E
·
面对光的传播方向看
面 振 动
线偏振光可沿两个相互垂直的方向分解
y
Ey E
Ex
x
E x E cos E y E sin
22
圆偏振光,
椭圆偏振光
右旋圆 偏振光
y E 0 传播方向 x y
右旋椭圆 偏振光
x
/2
z
某时刻右旋圆偏振光 E 随 z 的变化
23
起偏的原理: 利用某种形式的不对称性,如 从自然光获得偏振光 (1)物质的二向色性, (2)散射, • 偏振片 (3)反射和折射, 光轴 非偏振光 线偏振光 (4)双折射….
偏振片的起偏
10
4.典型的光路布局 在激光干涉仪光路设计中,一般应遵循“共路原则”,即 测量光束与参考光束尽量走同一路径,以避免大气等环境条件 变化对两条光路影响不一致而引起测量误差。同时,根据不同 应用需要,要考虑测量精度、条纹对比度、稳定性及实用性等 因素。下面介绍几种从不同角度考虑的典型光路布局。 (1)使用角锥棱镜反射器 这是一种常用的光路布局,如 下图(a)所示,图中角锥棱镜可使入射光和反射光在空间分离 一定距离,所以,这种光路可避免反射光束返回激光器。激光 器是一个光学谐振腔.若有光束返回激光器将引起激光输出频 率和振幅的不稳定。角锥棱镜还具有抗偏摆和俯仰的件能,可 以消除测量镜偏转带来的误差。图(a)所示光路的缺点是这种 成对使用的角锥棱镜要求配对加工,而且加工精度要求高。故 常采用一个作为可动反射镜。参考光路中用平面反射镜B作固 定反射镜。使用一个角锥棱镜作可动反射器还可采用其他几种 光路。图(b)中,镜Ml和M3上都镀有半反半透膜,M1用作分光 器,参考光束经M1反射后在镜M3与测量光束迭加,产生干涉。 M 11l和M3还能做成一体,如图(c)所示。
激光干涉测长技术

contents
目录
• 激光干涉测长技术概述 • 激光干涉测长的应用领域 • 激光干涉测长的技术优势与局限性 • 激光干涉测长的实验技术与操作流程 • 激光干涉测长的实际应用案例 • 结论
01 激光干涉测长技术概述
定义与特点
定义
激光干涉测长技术是一种基于光 的干涉原理的高精度长度测量方 法。
总之,激光干涉测长技术在未来仍将 发挥重要作用,为各领域的长度测量 提供更加准确、高效、可靠的技术支 持。
THANKS FOR WATCHING
感谢您的观看
精密测量案例
总结词
非接触、高效率
详细描述
在精密测量领域,激光干涉测长技术常用于测量各种运动机构的位移和速度。由于其非接触的测量方 式和高效率的特性,能够实现快速、准确的测量,为运动控制系统的优化提供了有力支持。
科学研究案例
总结词
高灵敏度、高分辨率
详细描述
在科学研究中,激光干涉测长技术常用于测量微观尺度的变化,如生物样品的生长、化 学反应的进程等。由于其具有高灵敏度和高分辨率的特性,能够捕捉到细微的变化,为
输标02入题
该技术基于光的干涉原理,通过测量激光干涉条纹的 数量来获取长度信息,具有非接触、无损、快速、高 精度的优点。
01
03
随着激光技术和数字信号处理技术的不断发展,激光 干涉测长技术的精度和稳定性得到了显著提高,为各
领域的长度测量提供了有力支持。
04
激光干涉测长技术的精度和稳定性主要取决于激光光 源的相干性、光学系统的稳定性和干涉条纹的计数精 度等方面。
03 激光干涉测长的技术优势 与局限性
技术优势
高精度测量
远程测量
激光干涉测长技术具有高精度的测量能力 ,能够实现纳米级甚至更高精度的长度测 量。
激光干涉测量技术1
2
激光干涉测量长度和位移
干涉仪组成——(一)干涉仪光路系统
(4)典型的光路布局——a.使用角锥棱镜反射器
只用一个角锥棱镜反射器作动镜还可 以组成图2.4(d)所示的双光束干涉 仪,它也是一种较理想的光路布局, 基本上不受镜座多余自由度的影响, 而且光程增加一倍。
19
2
激光干涉测量长度和位移
干涉仪组成——(一)干涉仪光路系统
9
2
激光干涉测量长度和位移
干涉仪组成——(一)干涉仪光路系统
(2)激光干涉仪常用的分光方法
a. 分波阵面法;b. 分振幅法;c. 分偏振法
a. 分波阵面:激光器发出的光,经准直扩束后,得到一平面光波的 波阵面。利用有微小夹角的两反射镜M1和M2(菲涅耳双面镜)的 反射,将光波的波阵面分为两部分,然后使二者在屏幕P处相遇, 在屏上出现明暗相间的干涉条纹,如图2.2(a)所示。
(4)典型的光路布局
在激光干涉仪光路设计中,一般应遵循“共路原则”,即测量光束 与参考光束尽量走同一路径,以避免大气等环境条件变化对两条光 路影响不一致而引起测量误差。同时,根据不同应用需要,要考虑 测量精度、条纹对比度、稳定性及实用性等因素。下面介绍几种从 不同角.
使用角锥棱镜反射器
整体式布局 光学倍频布局
d.
零初始光程差的结构布局
20
2
激光干涉测量长度和位移
干涉仪组成——(一)干涉仪光路系统
(4)典型的光路布局——b. 整体式布局
这是一种将多个光学元件结合在一起 ,构成一组合结构的布局。如图2.5所 示,采用立方体分光器,反射器蒸镀 在它上面和侧面。 优点:整个系统对外界的抗干扰性较 好,抗动镜多余自由度能力强,测量 灵敏度提高一倍。 缺点:这种布局调整不方便,光强吸 收较严重。
激光干涉位移测量技术
激光干涉位移测量技术摘要:为了实现纳米级以上分辨力位移的测量研究,利用激光干涉位移测量技术可以达到纳米级分辨力,其具有可溯源、分辨力高、测量速度快等特点,是目前位移测量领域的主流技术。
本文对目前主要的激光干涉位移测量技术进行了分类介绍,并对各种干涉仪的特点进行了分析,最后介绍了激光干涉位移测量技术的国内外发展现状和趋势。
关键词:纳米级;激光干涉;位移测量;1 引言干涉测量技术( interferometry ) 是基于电磁波干涉理论,通过检测相干电磁波的图样,频率、振幅、相位等属性,将其应用于各种相关的测量技术的统称。
用于实现干涉测量技术的仪器被称为干涉仪。
在当今多个科研领域,干涉测量技术都发挥着重要的作用,包括天文学,光纤光学,以及各种工程测量学。
其中由于上个世纪60年代激光的研制成功,使得激光干涉测量技术在各种精密工程领域得到了广泛的应用。
它的基本功能是将机械位移信息变成干涉条纹的电信号,再对干涉条纹进行调理和细分,进而获得所需要的测量信息。
整个激光干涉测量系统中主要的组成部分有光电转换、信号调理、信号细分处理。
1.1激光干涉仪分类激光干涉仪是以干涉测量为原理,利用激光作为长度基准,对数控设备(加工中心、三坐标测量机等)的位置精度(定位精度、重复定位精度等)、几何精度(抚养扭摆角度、直线度、垂直度)进行精密测量的精密测量技术。
由于激光具有波长稳定、波长短、具有干涉性,使得激光在现代光电测量系统中占据了重要的地位,尤其是在激光干涉测量系统中。
下面介绍激光干涉仪测量原理以及激光干涉仪。
光的相长干涉和相消干涉:图1.光的相长以及相消干涉如果两束光相位相同,光波会叠加增强,表现为亮条纹,如果两束光相位相反,光波会相互抵消,表现为暗条纹。
图1.1就是光的相长以及相消干涉,而激光干涉仪主要依据的原理就是激光的干涉产生明亮条纹并将其转换成相关的电信号,从而获取所需要的位移信息。
整个光电系统中激光干涉仪是最重要的组成部分,虽然目前市场存在各式的激光干涉仪,但从其工作的基本原理上来说,主要可以分为单频激光干涉仪以及外差激光干涉仪两种基本类型。
激光干涉仪检测方法
FANUC、OKUMA机床的激光干涉仪检测方法一、光的相干性二、激光干涉法测距原理三、FANUC螺补参数的设定四、关于FANUC系统正负方向补偿号的计算方法五、FANUC的检测用程式六、OKUMA螺补参数的设定七、OKUMA检测程式八、检测值输入的方法一、光的相干性相長性干涉當兩個波長相同的光束波形同步射出時,其波峰位置會如下圖2 一般重合,固稱為“相長性干涉”。
在相長性干涉的情況下,輸出波的振幅等於兩個輸入波的振幅之和。
•相消性干涉當兩個相干光束波形以180°的相位差異步射出時,一個輸入光束的波峰位置會如下圖 3 一般與另一個輸入光束的波谷重合,固稱為“相消性干涉”。
在相消性干涉的情況下,兩個輸入波會互相抵消而產生暗淡的光二、激光干涉法测距原理图片:根据光的干涉原理,两列具有固定相位差,而且有相同频率、相同的振动方向或振动方向之间夹角很小的光相互交叠,将会产生干涉现象,如图所示。
由激光器发射的激光经分光镜A分成反射光束S1和透射光束S2。
两光束分别由固定反射镜M1和可动反射镜M2反射回来,两者在分光镜处汇合成相干光束。
若两列光S1和S2的路程差为Nλ(λ为波长,N为零或正整数),实际合成光的振幅是两个分振幅之和,光强最大。
当S1和S2的路程差为λ/2(或半波长的奇数倍)时,合成光的振幅和为零,此时光强最小。
激光干涉仪就是利用这一原理使激光束产生明暗相间的干涉条纹,由光电转换元件接收并转换为电信号,经处理后由计数器计数,从而实现对位移量的检测。
由于激光的波长极短,特别是激光的单色性好,其波长值很准确。
所以利用干涉法测距的分辨率至少为λ/2,利用现代电子技术还可测定0.01个光干涉条纹。
因此,用激光干涉法测距的精度极高。
激光干涉仪由激光管、稳频器、光学干涉部分、光电接受元件、计数器和数字显示器组成三、FANUC 螺补参数的设定FANUC 0i 、16M 、18MFANUC 15M 5420各轴参考点的补偿号 5421负方向的最小补偿点号 5422正方向的最大补偿点号 5423螺补量比率 5424螺补间隔 1851背隙补偿FANUC 0M3620各轴参考点的补偿号 3621负方向的最小补偿点号 3622正方向的最大补偿点号 3623螺补量比率 3624螺补间隔 1851背隙补偿11/0.1 螺补倍率712-715 螺补间隔756-759 螺补间隔1000,补偿基准点20003000,4000补偿值1001-11282001-21283001-31284001-4128535-538 背隙补偿注:P11.1,P11.0组合形式:00 X101 X210 X311 X4四、关于FANUC系统正负方向补偿号的计算方法例子:X轴行程:-1000mm-0mm,参考点为0mm,基准点编号为20,间隔距离为100mm,补偿倍率为1负方向补偿号=基准编号-(负方向行程/间隔)+1=20-1000/100+1=11正方向补偿号=基准编号+(正方向行程/间隔)+1=20+0/100+1=21五、FANUC检测用程式FANUC检测用的宏程式有A类宏程序和B类宏程序两种。
激光干涉仪检测与调整过程讲解
激光干涉仪检测与调整过程7.1 检测前工作7.1.1 检测前应该设置什么参数、检测程序怎么生成?一、目标位置:当选择目标位置以进行机床轴的校准时,目标位置通常应横跨该轴的工作区域。
下面我们以目标为从0到450MM,并使间隔为30MM为间距如图所示:在软件中如下设置目标:选择目标点中的等距定义目标,如下图所示图1 →图2接着弹出如图2的窗口接着我们在内部设置数据如图三所示图3到这里的时候我们将目标点设置完毕,接下来我们要上生成。
二、生成检测程序:激光干涉仪在检测的时候时按照我们在第一步设定的目标点运动的,即从0到450MM每30MM为一个点,因此机床在运动的时候必须和软件设置的一致,所以我们必须生成检测程序。
程序的生成方法图下:选择定义工具栏下的零件程序下的产生按键,如下图所示:图1 →图2在弹出的窗口中输入文件名,并且选择程的序存放路径按保存,会弹出下图:图1 →图2在图1中需要我们选择的为:数控系统的型号。
我们针对我们当前检测机床的数控系统型号作正确的选择,接着弹出图2的窗口,这个窗口要求我们填写与程序相关的数据,我们如下图所示填写:程序号:0001轴名为:Y运行次数为:3选择方向为:双向暂停周期为:4秒越程为:4.0000毫米零件程序类型:线性进给量:1500 ;轴方式为:普通名词解释:程序号:该程序的序号轴名:待校准轴的名称这里记住是大写运行次数:我们希望该程序运行多少次选择方向:在轴上行走的方向时一来一回的间隔点还是只去这样走回时不走暂停周期:等待软件记录数据的时间,这里要根据电脑的性能作调整越程:这里是为了消除方向间隙而设置的,一般选择默认,也可以自行设置零件程序类型:选择运行的方式,因为我们是走直线的所以我们选择线性进给量:机床运动的速度到这里的时候我们已经完成了程序的生成,我们使用文本格式打开文件可以看到程序如下:一定能用得上,所以我们统一使用以下修改过的程序作为标准:机床,但它在系统中的适应度比较强。
干涉法测微小量
干涉法测微小量
激光干涉法是一种用来测量微小量的精密仪器,它通过使用单边激光来实现定位和测量。
它基于物体反射激光束照射在一个固定的参考点,通过物体移动而改变激光束在参考点的位置,得出物体位移量的原理。
其原理是,一束激光从一个发射机发射出来,照射在物体的表面上,反射回另外一个探测机收集,由于物体位置的移动而导致反射激光束和发射激光之间的差异,从这个差异来检测物体位移量,所获得的信息通过传感器进行数据处理,从而实现。
激光干涉法测量优势很多,它不仅具有极高的精度,而且测量时间远快于传统的测量技术,可以准确测量微小量,范围可以达到纳米级,从而使激光干涉法变得非常灵活,可以满足各种精细的测量场合。
激光干涉法的应用也很盛行,它广泛应用于测量微小量,在电子封装、光机械行业以及航空航天等行业有着大量应用。
同时,它也广泛用于衡量望远镜、测量物体大小误差和扫描定位等测量工作中。
因此,激光干涉法在测量微小量上有着很大的作用。
激光干涉法的使用也很容易,几乎可以在任何空间中实现,仪器配件紧凑耐用,高精度,而且配置简单,可以满足客户的多种需求。
此外,本法还可以用于测量极低温和高强度环境,具有良好的适应性。
总之,激光干涉法是一种能实现微小量测量的精密仪器,它具有高精度,配置简单,环境适应性强等优势,在微小量测量中有着独特的优势和作用。
通过不断研发和改进,激光干涉法可以帮助我们更准确的测量微小量,发挥更大的价值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
当反射镜M1与M2彼此间有一交角2,且当较小,即sin时, 经简化可求得干涉条纹的光强为:
I (x, y) 2I0 (1 cos kl2 )
当为一常数时,当测量在空气中进行,且干涉臂光程不大,略去大气的影响,则
l N
2
因此,记录干涉条纹移动数,已知激光波长,由上式即可测量反射镜的位移量, 或反射镜的轴向变动量L。干涉条纹的计数,从图1中知道,定位在BS面上或无 穷远上的干涉条纹由成像物镜L2将条纹成在探测器上,实现计数。
四、实验步骤
• 公共部分: • 开机,激光器1迅速起辉,待光强稳定; • 打开驱动电源开关; • 检查CMOS23上电信号灯亮否; • 调整光路时若移开反射镜4,13,扩束激光; • 移入反射镜4,13,不扩束激光。 • 注:以下所有实验的开始步骤均同公共部分 • 本实验步骤 • 扩束 • 在组合工作台16,18上分别装平面反射镜,调节工作台16,18上调平调向测
三、实验光路
1
2
3
1
5
6
送
24
计
算 23
机
22
9 10
20
14
8
7
16
PZT
18
激光器1发出的激光经衰减器2(用于调节激光强度)后由二个定向小孔3,5引导,经 反射镜6,7进入扩束准直物镜8,10(即图1中的L1),由分光镜14(即图1中BS) 分成二束光,分别由反射镜16(即图1中的M1),18(M2)反射形成干涉条纹并经 成像物镜20(即图1中L2)将条纹成于CMOS 23上(即D),这样在计算机屏上就可 看到干涉条纹,实现微位移的测量。
激光通过扩束准直系统L1提供入射的平面波此平面波可用下式表示:
U (Z ) Aeikz
经半反射镜BS分为二束,一束经参考镜M1,反射后成为参考光束,其复振幅
U R AR eR ( zR )
另一束为透射光,经测量镜M2反射,其复振幅Ut,用下式表示
U t At eit ( zt )
此二束光在BS上相遇,产生干涉条纹。干涉条纹的光强I(x,y)由下式决定
微器,使二路反射光较好重合(在成像物镜20后焦面上,两反射光会聚的焦 斑重合)
• 打开计算机,然后微调工作台上测微器,在显示屏上看见干涉条纹 • 调整CMOS在轨道上的位置,使干涉条纹清晰,锁定23,再调节可调光阑22
孔径位置,滤除分光镜寄生干涉光
• 测量程序操作
五、实验记录
序号
1
驱动位移量 (L)
条纹数N)
N 测量位移量(L)
2
备注
2
3
4
精密位移量的激光干涉测量方 法及实验
一、实验目的
• 了解激光干涉测量的原理 • 掌握微米及亚微米量级位移量的激光干涉
测量方法
• 了解激光干涉测量方法的优点和应用场合
二、实验原理
He-Ne 激光器
L1
M1(参考镜)
BS M2(测量镜)
扩束准直系统
L
L2
L1
D
干涉条纹
/2 图 1 T-G 干涉系统
二、实验原理