激光干涉微位移测量系统设计课题总结报告.
激光位移检测系统课程设计

激光位移检测系统课程设计一、课程目标知识目标:1. 理解激光位移检测系统的基本原理,掌握其工作流程和关键部件功能。
2. 学习相关的物理知识,如光的传播、反射、干涉等,并将其应用于激光位移检测。
3. 掌握数据处理与分析方法,能对激光位移检测系统的输出数据进行有效解析。
技能目标:1. 能够操作激光位移检测设备,进行简单的实验设置和数据采集。
2. 培养动手实践能力,通过小组合作完成激光位移检测系统的组装与调试。
3. 提高问题解决能力,能够运用所学知识分析和解决实际应用中的问题。
情感态度价值观目标:1. 培养学生对物理学科的兴趣,激发他们探索科学技术的热情。
2. 培养学生的团队合作意识,学会在小组中分享观点、协同解决问题。
3. 增强学生的环境保护意识,认识到激光位移检测技术在生产生活中的重要应用和价值。
分析课程性质、学生特点和教学要求:本课程为高二年级物理选修课程,结合学生已掌握的光学知识,通过激光位移检测系统课程设计,使学生在实际操作中巩固理论知识,提高实践能力。
课程注重培养学生的动手操作能力、问题解决能力和团队协作能力,旨在激发学生对物理科学的兴趣,培养他们的创新精神。
课程目标分解:1. 知识目标:通过讲解、演示和实验,使学生掌握激光位移检测系统的基本原理和操作方法。
2. 技能目标:通过实验操作、小组合作和问题分析,培养学生的动手实践能力和问题解决能力。
3. 情感态度价值观目标:通过课程实施,引导学生体验科学探究的乐趣,培养他们的团队合作精神和环保意识。
二、教学内容1. 激光位移检测系统基本原理- 光的传播、反射、干涉等现象- 激光特性及其在位移检测中的应用- 激光位移传感器的工作原理2. 激光位移检测系统的组成与功能- 激光发射器、接收器、光束调节器等关键部件- 系统的组装与调试方法- 各部件在位移检测中的作用及相互关系3. 实验操作与数据处理- 实验设备的使用方法与注意事项- 实验步骤及操作技巧- 数据采集、处理与分析方法4. 激光位移检测技术的应用案例- 工业生产中的质量控制与自动化- 建筑物、桥梁等结构物的健康监测- 航空航天、生物医学等领域的应用5. 教学内容的安排与进度- 第一节课:激光位移检测系统基本原理与激光特性- 第二节课:激光位移检测系统的组成与功能- 第三节课:实验操作与数据处理- 第四节课:激光位移检测技术的应用案例及讨论教学内容依据课程目标,结合教材相关章节,系统性地组织与安排。
2D激光位移传感测量实验实验报告
《现代光学测量技术》实验报告成绩:实验项目名称2D激光位移传感测量院(系)专业班级学生姓名学号同组人指导老师实验日期一、实验目的1、在了解激光三角测量基本原理的基础上,掌握基于激光线光源的非接触式光学三维测量方法;2、了解影响测量精度和测量范围的主要因素;3、了解三维测量基本原理,通过实际操作,掌握基本测量方法;4、深入理解三角测量原理,握基于激光线光源的三维测量方法,通过改变实验系统结构参数,分析影响测量分辨率和测量范围的因素。
二、实验仪器线激光器、导轨滑块组件、电控平移台、电控旋转台、控制器、图像处理软件三、实验内容1、学习激光三角法的基本原理;2、2D位移传感器实验系统的安装与调试;3、2D激光位移传感器实验系统的标定;4、利用2D激光位移传感器测量物体面形。
四、实验步骤1、系统调整:(1)打开测量系统,打开测量实验软件的采集功能;(2)将标定板固定在载物台上,移动标定板到CCD相机的视场中间位置,调节CCD镜头,使标定板中间的黑色竖线最清晰;(3)调节CCD的角度,尽量使标定板的黑色竖线成像在CCD像面的一列像素上;(4)将线激光器固定在高度支架上,打开激光器,调整激光器的位置(可以移动整个测量头)、高度和偏摆角,使激光线与标定板上的黑色竖线重合;(5)移动标定板到临近激光器的位置,调节激光器的偏摆角度和测量头的位置,使激光线与标定板上的黑色竖线重合,再把标定板沿导轨平行移至台上尽量远位置,调整激光器的偏摆角度和测量头的位置,使激光线与标定板上的黑色竖线重合。
重复上述过程,直到邻近和远离两个位置激光线与标定板上的黑色竖线都重合;(6)移动测量头,使激光线稍微偏离黑色标定竖线,相对测量头前后移动标定板的位置,记录激光线在CCD像面左端的位置和右端的位置为系统标定做准备;2、测量实验:2.1测量系统标定实验(1)将标定板移动到激光线成像到CCD像面左侧位置,根据标定时定下的两个位置的距离差对系统进行标定。
实验一 精密位移量的激光干涉测量方法
实验一精密位移量的激光干涉测量方法一、实验目的:1.了解激光干涉测量的原理2.掌握微米及亚微米量级位移量的激光干涉测量方法3.了解激光干涉测量方法的优点和应用场合二、实验原理:本实验采用泰曼-格林(Twyman-Green)干涉系统,T-G干涉系统是著名的迈克尔逊白光干涉仪的一种变型,在光学仪器的制造工业中,常用其产生的等间距干涉条纹对光学零件或光学系统作综合质量检验。
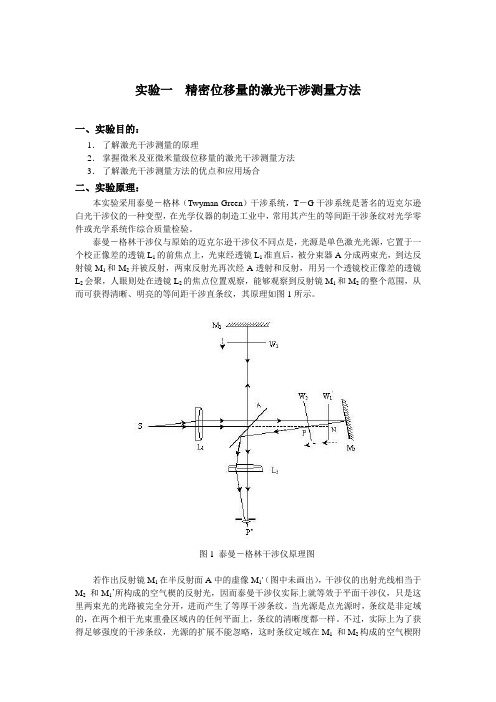
泰曼-格林干涉仪与原始的迈克尔逊干涉仪不同点是,光源是单色激光光源,它置于一个校正像差的透镜L1的前焦点上,光束经透镜L1准直后,被分束器A分成两束光,到达反射镜M1和M2并被反射,两束反射光再次经A透射和反射,用另一个透镜校正像差的透镜L2会聚,人眼则处在透镜L2的焦点位置观察,能够观察到反射镜M1和M2的整个范围,从而可获得清晰、明亮的等间距干涉直条纹,其原理如图1所示。
图1 泰曼-格林干涉仪原理图若作出反射镜M1在半反射面A中的虚像M1'(图中未画出),干涉仪的出射光线相当于M2和M1’所构成的空气楔的反射光,因而泰曼干涉仪实际上就等效于平面干涉仪,只是这里两束光的光路被完全分开,进而产生了等厚干涉条纹。
当光源是点光源时,条纹是非定域的,在两个相干光束重叠区域内的任何平面上,条纹的清晰度都一样。
不过,实际上为了获得足够强度的干涉条纹,光源的扩展不能忽略,这时条纹定域在M1和M2构成的空气楔附近。
下面解释干涉条纹的产生,如图1所示,设入射平面波经M 1反射后的波前是W 1,经M 2反射后相应的波前是W 2,W 1和W 2位相相同。
引入虚波前W 1’ ,它是在W 1半反射面A 中的虚像,图中画出了虚相交于波前W 2上P 点的两支光路,这两支光在P 点的光程差为PN h ∆==即等于W 1’到P 点的法线距离,因为W 1’和W 2之间介质(空气)折射率为1,显然当0,1,2,...h m m λ==±±时,P 点为亮点,而当 1()0,1,2,...2h m m λ=+=±±时,P 点为暗点。
激光干涉测量
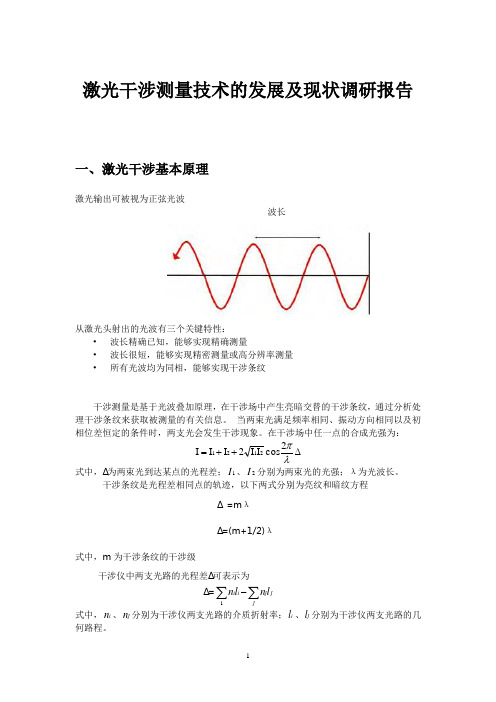
激光干涉测量技术的发展及现状调研报告一、激光干涉基本原理激光输出可被视为正弦光波波长从激光头射出的光波有三个关键特性:• 波长精确已知,能够实现精确测量• 波长很短,能够实现精密测量或高分辨率测量• 所有光波均为同相,能够实现干涉条纹 干涉测量是基于光波叠加原理,在干涉场中产生亮暗交替的干涉条纹,通过分析处理干涉条纹来获取被测量的有关信息。
当两束光满足频率相同、振动方向相同以及初相位差恒定的条件时,两支光会发生干涉现象。
在干涉场中任一点的合成光强为: ∆++=λπ2c o s I I 2I I I 2121式中,∆为两束光到达某点的光程差;1I 、2I 分别为两束光的光强;λ为光波长。
干涉条纹是光程差相同点的轨迹,以下两式分别为亮纹和暗纹方程∆ =m λ∆=(m+1/2)λ式中,m 为干涉条纹的干涉级干涉仪中两支光路的光程差∆可表示为∆=j j j ii l n l n ∑∑-i式中,i n 、j n 分别为干涉仪两支光路的介质折射率;i l 、j l 分别为干涉仪两支光路的几何路程。
当把被测量引入干涉仪的一支光路中,干涉仪的光程差则发生变化,干涉条纹也随之变化。
通过测量干涉条纹的变化量,可以获得与介质折射率n和几何路程l有关的各种物理量和几何量。
二、发展历史、现状及趋势早在十九世纪八十年代,人们第一次证实了光干涉原理可以作为测量工具使用。
尽管该技术多年来不断发展,但是使用极小、稳定、准确定义的光波长作为测量单位的基本原理仍然没有改变。
干涉测量技术是以光波干涉原理为基础进行测量的一门技术。
20世纪60年代以来,由于激光的出现、隔振条件的改善及电子与计算机技术的成熟,使干涉测量技术得到长足发展。
干涉测量技术大都是非接触测量,具有很高的测量灵敏度和精度。
干涉测量应用范围十分广泛,可用于位移、长度、角度、面形、介质折射率的变化及振动等方面的测量。
在测量技术中,常用的干涉仪有迈克尔逊干涉仪、马赫-泽德干涉仪、菲索干涉仪、泰曼-格林干涉仪等;70年代以后,抗环境干扰的外差干涉仪(交流干涉仪)发展迅速,如双频激光干涉仪等;近年来,光纤干涉仪的出现使干涉仪结构更加简单、紧凑,干涉仪性能也更加稳定。
激光合成波长纳米位移测量干涉仪的关键技术研究的开题报告
激光合成波长纳米位移测量干涉仪的关键技术研究的开题
报告
一、选题背景和研究意义
随着精密仪器制造技术的不断发展,纳米级精度的测量需求逐渐增加,尤其对于高精度制造领域来说,精确测量是保证产品质量和性能的关键。
而激光干涉仪具有高灵敏度、高分辨力、无接触测量等优点,成为纳米级测量的重要手段之一。
然而,传统的激光干涉仪存在着波长漂移、热漂移等问题,会对测量精度产生较大的影响。
为了解决这些问题,需要研究激光合成波长纳米位移测量干涉仪的关键技术,以提高干涉仪的测量精度和稳定性。
二、研究内容和研究方法
本课题的研究内容主要包括:
1. 激光合成波长技术研究,探究激光合成波长的原理和实现方法。
2. 激光合成波长纳米位移测量干涉仪系统设计,包括光路设计、信号采集电路设计等。
3. 激光合成波长纳米位移测量干涉仪系统的实验验证,对干涉仪的测量精度、准确性和稳定性进行测试和验证。
本课题的研究方法主要包括理论分析、实验设计、实验验证等方法。
三、研究进展和计划
目前,我们已经对激光合成波长技术和激光干涉仪原理进行了深入的研究,初步确定了干涉仪系统的设计方案,并开始进行实验验证。
下一步,我们将继续完善干涉仪系统的设计,优化系统性能,并进行更加详细的实验研究,最终实现纳米级位移测量的高精度、高稳定性和高准确性。
四、总结
本研究通过对激光合成波长纳米位移测量干涉仪的关键技术研究,旨在提高激光干涉仪的测量精度和稳定性,探索高精度、高稳定性和高准确性的测量手段,为高精度制造领域和其他相关领域的发展做出贡献。
激光干涉计量实验报告

一、实验目的1. 理解激光干涉原理,掌握激光干涉计量的基本操作。
2. 学习使用激光干涉仪进行长度、距离等参数的精确测量。
3. 了解激光干涉仪在工程测量中的应用。
二、实验原理激光干涉计量是基于光波干涉原理,通过测量干涉条纹的变化来确定长度、距离等参数的一种方法。
实验中使用的激光干涉仪通过分束器将激光束分为两束,一束光通过待测距离,另一束光作为参考光。
两束光在探测器处发生干涉,产生干涉条纹。
通过测量干涉条纹的变化,可以计算出待测距离。
三、实验仪器1. 激光干涉仪2. 分束器3. 反射镜4. 探测器5. 计算机及数据采集软件四、实验步骤1. 将激光干涉仪、分束器、反射镜和探测器按照实验要求连接好。
2. 打开激光干涉仪电源,预热10分钟。
3. 打开数据采集软件,设置采集参数。
4. 将反射镜放置在待测距离处,调整反射镜的角度,使光束与探测器垂直。
5. 观察干涉条纹的变化,记录条纹移动的次数。
6. 根据干涉条纹移动的次数,计算出待测距离。
五、实验数据1. 待测距离:d = 10m2. 干涉条纹移动次数:n = 10003. 干涉条纹间距:ΔL = 1mm六、数据处理根据实验数据,可以使用以下公式计算待测距离:d = n × ΔL代入实验数据,得到:d = 1000 × 1mm = 1000mm = 1m七、实验结果与分析实验结果显示,待测距离为1m,与实际距离基本一致,说明实验结果准确可靠。
通过激光干涉计量实验,我们掌握了激光干涉计量的基本原理和操作方法,为以后进行工程测量奠定了基础。
八、实验总结1. 激光干涉计量是一种精确的测量方法,广泛应用于工程测量、科学研究等领域。
2. 在实验过程中,要确保光路稳定,避免外界因素对实验结果的影响。
3. 通过实验,我们掌握了激光干涉计量的基本原理和操作方法,提高了自己的实验技能。
九、注意事项1. 实验过程中,注意安全,避免激光直射眼睛。
2. 实验前,仔细阅读实验指导书,了解实验原理和操作步骤。
基于激光干涉的微位移系统(DOC)
随着光学检测元件和精密制造工艺的提高以及电子元器件的发展,伴随计算机的更新换代和工业自动控制技术的不断进步,利用光电结合的方法是解决问题的有效途径,如光外差法、电镜法、激光三角测量法【6】、干涉法测量【7】(全息干涉测量、散斑干涉测量、光栅位移激光多普勒测量【9】)其测量精度高、反应速度快、易于实现数字化测量【4】【5】【8】【10】。
而国内关于微位移领域中的研究起步较晚,水平还比较低,但比较比较活跃。在生产测微仪方面,国内的公司比较少。其中率先开发出产品的是中国科技大学精密机械及精密仪器系的李胜利教授等人,在1995年研制了JW型测微仪,他们的测量精度有0.5μm,1μm,5μm三种,但测量范围最大仅5mm。另外比较有名的是深圳亨利新实业有限公司,它依靠华中科技大学的技术,生产的LT系列激光精密测微仪,其按量程和精度可分为三档:(1)高精度、小量程—1μm、1mm(2)中精度、中量程—0.01mm、10mm;(3)低精度、大量程—0.3mm、300mm【13】【15】。
随着近代工业的迅速发展,对计量测试技术的精度、效率和自动化的要求越来越高,并向着动态、在线、实时等方向发展。一些航空领域的测试,要求在持殊的条件下进行,如高温、高压、高速、放射、腐蚀介质或小空间等;在机械工业中,为提高精密加工机床的精度,结构的稳定性和可靠性,要求检测其在承载条件下工作机的动态形变,如大机械的动态变形场、大型发电机、大型机械主轴在运转过程中的变形、机床导轨在工作中的形变等;在建筑工业中,侨梁承载下的变形场检测、大坝,船舶等工程结构变形状况的检测等,以及对滑坡、地陷、雪崩、地基崩塌等地质灾害的监测都需要进行测量,以获得测量对象的动态测量信息。就这些方面的微位移测量而言,传统的静态测量技术满足不了现代测试技术中主动测量的要求。因此,在航空、军工、机械等各个领域中的许多测量,非接触式微位移测量方法应用广泛,也起到了十分重要的作用。根据工业生产实际的需要,将多普勒测量技术应用到固体的运动参数测量越来越受到重视,进行固体运动参数测量有很大的意义。
实验4激光干涉仪测量位移实验-
2020/11/1
13
实验4激光干涉仪测量位移实验-
Step 1
Set up the HeNe laser source and make sure the beam can incident to the first collimation mirror in a straight line.
2020/11/1
4
11
Expected results
2020/11/1
12
Questions
1. Measure the lengths of the two arms of the interferometer and calculate the difference. The typical width of the spectrum of a HeNe laser is 1.5 GHz. Estimate its coherent length. Would you expect the length difference of the two arms of the interferometer has a significant effect on the interference visibility? Explain why.
2. Discuss other effects that may reduce the interference visibility in your setup.
Reference: Lecture notes on Coherent Optics (Advanced Optics I, week 18)
2020/11/1
8
Step 6
Set up the detector to receive the coherent beam from the beam Splitter and connect the detector To the OSC and power supply.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
北京信息科技大学《专业综合实践》报告题目激光干涉微位移测量系统设计学院仪器科学与光电工程专业光信息科学与技术学号**********、744、750、728姓名邓伟壮、潘晗、张驰、贾希冉指导老师日期2015.1目录题目激光干涉微位移测量系统设计 (1)目录 (2)一、方案要求 (3)1、设计内容 (3)2、设计目标 (3)3、设计预计实现目标 (3)二、方案调研及原理 (3)1、光学微位移测量的几种方法 (3)(1)光外差法 (3)(2)电镜法 (3)(3)激光三角测量法 (4)(4)干涉法测量 (4)2、光电接收器件 (4)(1)光敏电阻 (4)(2)PIN光电二极管 (4)(3)利用PIN光电二极管检查光信号 (6)三、测量系统设计 (8)1、整体电路设计 (8)2、光路部分 (8)3、电路部分设计 (10)(1)前置放大电路(电流/电压转换) (10)(2)电压跟随器(电压稳定) (11)(3)去直流电路(高通滤波) (11)(4)滤波电路(低通滤波) (12)(5)两级放大电路(5~50倍放大) (12)(6)负电压电路(由于用电池供电,需要负电源) (12)4、软件部分设计 (13)四、系统调试分析 (13)1、光路部分 (13)2、电路部分 (13)3、软件部分 (13)五、结论 (13)激光干涉微位移测量系统设计课程设计总结报告成员:邓伟壮 2011010736潘晗 2011010744张驰 2011010750贾希冉 2011010728一、方案要求1、设计内容基于激光干涉的方法,利用光电探测器,实现微位移的高精度测量。
设计主要包括两部分:1)方案调研、测量系统设计及分析;2)搭建系统,获取干涉条纹,条纹处理,完成微位移测量。
2、设计目标1)微位移测量精度达到微米量级;2)测量范围小于等于1毫米;3)测量结果显示。
3、设计预计实现目标1)光学部分得到可视性较好的干涉条纹2)电路部分最终输入单片机前得到方波的脉冲波形3)单片机后在LCD上显示出微测量的数值结果4)(拓展)在电脑中显示测量结果二、方案调研及原理1、光学微位移测量的几种方法光学测量方法是伴随激光、全息等技术的研究发展而产生的方法,它具有非接触、材料适应性广,测量点小、测量精度高、可用于实时在线快速测量等特点,在微位移测量中得到了广泛的应用。
特别是近20年来电子技术与计算机技术飞速发展为位移的光学测量提供了有力支持,使其理论研究不断深入,并将成果逐步应用到工业生产领域。
按使用光学的原理不同分为以下几种方法:(1)光外差法光外差法是利用光外差原理,激光束通过分光束分成两束光,一束经过光频移器后,得到一个频移,作为测量光束;另一束未经频移的光束作为参考光束。
测量光聚焦在被测表面,其反射光再次经过一定频移后与参考光束会合,经偏振片相互干涉由光电接收器接收,从而获得被测表面的微位移。
这种方法的测量精度与分辨率都比较高,分辨率能达到亚纳米级,因此受到人们的普遍重视,比较适用于超精度表面的测量,但量程小、结构复杂、成本比较高。
(2)电镜法电镜法是利用电子显微镜直接得到被测表面的微位移。
但目前其产品体积大,且局限于在实验室研究使用,不能用于加工生产现场。
(3)激光三角测量法三角法测量法是种传统的测位移方法,将被测物表面与光源及接收系统摆在三个点,构成三角形光路。
其工作过程主要是:激光光源发出的光束经透镜照射被测物体表面上;光线由物体表面漫反射,一部分被光电接收系统接收。
如果物体表面高低不平,则在光电接收探测器的光敏面上的光斑有一定的移动,根据三角形相似原理可求出物体表面的位移[9]。
(4)干涉法测量干涉测量法是基于光波的干涉原理测位移的方法。
激光的出现使干涉测量位移的应用范围更加广泛。
其测量的基本原理是:由激光器发出的光经分光镜分为两束,一束射向干涉仪的固定参考臂,经参考反射镜返回后形成参考光束;另一束射向干涉仪的测量臂,测量臂中的反射镜随被测物体表面的位移变化而移动,这束光从测量反射镜后形成测量光束。
测量光束和参考光束的相互叠加干涉形成干涉信号。
干涉信号的明暗变化密度与被测测位移成反比。
因此,由光接收器件光电显微镜得到的明暗变化密度可以得出被测位移的值。
干涉法原理简单、构造容易,测量精度高,测量范围大,适用于实时动态测量而被广泛应用于位移测量。
*注:在调研的四种方法里,根据测量精度要求,最后我们选取了干涉法测量中的马赫曾德干涉作为光路部分的搭接,并对其进行改进。
2、光电接收器件(1)光敏电阻光敏电阻又称光敏电阻器或光导管,常用的制作材料为硫化镉,另外还有硒、硫化铝、硫化铅和硫化铋等材料。
这些制作材料具有在特定波长的光照射下,其阻值迅速减小的特性。
这是由于光照产生的载流子都参与导电,在外加电场的作用下作漂移运动,电子奔向电源的正极,空穴奔向电源的负极,从而使光敏电阻器的阻值迅速下降。
光敏电阻器是利用半导体的光电导效应制成的一种电阻值随入射光的强弱而改变的电阻器,又称为光电导探测器;入射光强,电阻减小,入射光弱,电阻增大。
还有另一种入射光弱,电阻减小,入射光强,电阻增大。
光敏电阻器一般用于光的测量、光的控制和光电转换(将光的变化转换为电的变化)。
常用的光敏电阻器硫化镉光敏电阻器,它是由半导体材料制成的。
光敏电阻器对光的敏感性(即光谱特性)与人眼对可见光(0.4~0.76)μm的响应很接近,只要人眼可感受的光,都会引起它的阻值变化。
设计光控电路时,都用白炽灯泡(小电珠)光线或自然光线作控制光源,使设计大为简化。
优点:内部的光电效应和电极无关(光电二极管才有关),即可以使用直流电源;灵敏度和半导体材料、以及入射光的波长有关;环氧树脂胶封装,可靠性好、体积小、灵敏度高、反应速度快、光谱特性好缺点:受温度影响较大;响应速度不快,在ms到s之间,延迟时间受入射光的光照度影响(光电二极管无此缺点,光电二极管灵敏度比光敏电阻高)(2)PIN光电二极管光电二极管的光探测方式有两种结构: 一是光伏模式,在这种模式下,光电二极管处于零偏状态,不存在暗电流错误!未找到引用源。
,有较低的噪声,线性好,适合于比较精确的测量;二是光导模式,在这种模式下,需给光电二极管加反向偏置电压,存在暗电流错误!未找到引用源。
,由此会产生较大的噪声电流,有非线性,通常应用在高速场合。
光电二极管的特点:(1)反向电流随入射光照度的增加而变大,在一定反向电压范围内,反向电流的大小几乎与反向电压无关;(2)在入射光照一定时,光电二极管相当于恒流源,其输出电压随负载电阻增大而升高;(3)光电二极管的暗电流错误!未找到引用源。
很小,光电流错误!未找到引用源。
较大。
光照下PIN光电二极管PN结的伏安特性为:错误!未找到引用源。
式中,错误!未找到引用源。
为PN结的反向饱和电流,V为包括外电压和光电压的实际结电压;K为玻尔兹曼常数,T为探测器的工作温度。
由式子可以得出以错误!未找到引用源。
为参量的伏安特性曲线,从图中可以看出光电二极管的反向输出电流与照强度成正比。
图2.2给出了PIN光电二极管的等效电路。
它包括光电流错误!未找到引用源。
,暗电流错误!未找到引用源。
,结电阻错误!未找到引用源。
,结电容错误!未找到引用源。
的并联。
其中暗电流对应于工作电压下没有光照时的输出电流,错误!未找到引用源。
为串联电阻,其值远小于负载电阻错误!未找到引用源。
,通常可以忽略。
图2.1 PIN光电二极管伏安特性在应用时,要求光伏探测器工作在线性范围内,因此必须保证错误!未找到引用源。
>>错误!未找到引用源。
>>错误!未找到引用源。
,器件近似以短路方式工作。
短路电流I与入射到探测器上的光功率错误!未找到引用源。
成正比,并且不受工作温度的影响。
图2.2 PIN光电二极管的等效电路(3)利用PIN光电二极管检查光信号光电二极管的输出电流信号很小(在微安级)、信号频率范围大( 从直流到1 MHz方波)。
为了提取有用信息,必须先将该电流信号变换为电压信号,然后再进一步放大。
为获得最佳的效果,在电路设计时必须考虑高增益、低噪声及宽频带的要求。
①提高响应度与输出的线性图2.3 光电转换原理图PIN 光电二极管没有内部增益(即只有单位增益),因此他对光的响应度是不高的。
在单位增益中一个入射光子只产生一个电子的光电流。
根据波长,其最高量子效率(转换效率) 为92%。
因此在使用时必须把光电二极管输出的电信号放大。
典型的光电转换电路如图2.3所示。
电路中光电二极管工作于光导模式,可探测微弱的光,另外运算放大器可以获得高达错误!未找到引用源。
或更高的增益;因此,图2.3可有效提高光响应度。
实际上,这也是一个I-V 变换器,由于负反馈的原因,运算放大器的等效输入阻抗为:错误!未找到引用源。
式中错误!未找到引用源。
是运算放大器的开环输入阻抗,对场效应管输入的情形,错误!未找到引用源。
Ω。
错误!未找到引用源。
是开环放大倍数, 一般错误!未找到引用源。
大于106 ,将这些值代入上式可知错误!未找到引用源。
的值很小,接近于0 Ω(此时光电流与辐照光功率成良好的线性关系)。
又由于运算放大器的开环输入阻抗错误!未找到引用源。
很大(虚断) ,光电二极管的电流都流入了反馈电阻,故运放的输出电压为错误!未找到引用源。
其中错误!未找到引用源。
是光电二极管的短路输出电流,其值与辐照光功率成正比,由此可见该电路的输出电压与入射光功率成良好线性关系。
②降低噪声光电二极管、电阻及运算放大器等器件都存在散粒噪声、热噪声等。
放大器在放大光电二极管输出信号的同时将噪声也放大了,从而影响系统的分辨率。
反馈电阻错误!未找到引用源。
在输出端造成的噪声分量为:错误!未找到引用源。
带宽错误!未找到引用源。
可见,采用错误!未找到引用源。
较大的光电二极管,反馈电阻错误!未找到引用源。
较小的运算放大电路将使输出噪声减小。
随着频率的增加,错误!未找到引用源。
的作用开始表现出来,信号电流的放大倍数开始下降,转折频率为错误!未找到引用源。
而噪声电压与信号电流的幅频特性完全不同。
在直流段和较低频率时噪声电压的放大倍数为错误!未找到引用源。
随着频率的增加,噪声增益曲线首先由于错误!未找到引用源。
的作用开始升高,直至由于电容错误!未找到引用源。
的作用而停止。
在高频段,噪声增益被限定在错误!未找到引用源。
由此可见错误!未找到引用源。
越大,错误!未找到引用源。
越小,噪声的影响越小。
加入错误!未找到引用源。
可限制高频段的噪声增益。
另外由于运算放大器存在着失调电压和失调电流,且随温度的变化而变化。
虽然失调电压和失调电流在电路调整时能加以补偿,但是温度漂移的影响将在电路的输出端形成噪声。
为降低放大电路的输出噪声,需要选用输入失调电压温漂及输入失调电流温漂都较小的运算放大器,同时选用错误!未找到引用源。