凸轮机构设计及其动态仿真
毕业论文-凸轮机构建摸,受力分析和运动仿真与分析研究

摘要凸轮是一具有曲面轮廓的构件,一般多为原动件(有时为机架);当凸轮为原动件时,通常作等速连续转动或移动,而从动件则按预期输出特性要求作连续或间隙的往复运动、移动或平面复杂运动。
本文主要介绍凸轮的大体概念与凸轮廓线的设计计算,以及后期使用Pro/E软件仿真其廓线。
凸轮轮廓曲线是凸轮机构设计的关键,常用的设计方法有解析法和图解法。
本文将对这两这种方法进行大致分析与应用设计,利用Pro/E软件绘制凸轮机构实体模型,并用Pro/E软件自带的Pro/MECHANICA Motion插件设计凸轮机构运动模型,进行机构运动学仿真分析,可以较准确掌握机械产品零部件的位移、速度和加速度等动力学参数,进而可分析机构动作的可靠性。
主要技术要求为:熟悉凸轮设计基本原理及相关理论计算;凸轮机构运动仿真及受力分析;指定内容的翻译和Pro/E软件的熟练应用。
本文将重点研究凸轮机构建摸,受力分析和运动仿真与分析。
通过理论上的计算和研究,结合图解以及解析的方法,算出凸轮廓线的大致数据,用Pro/E软件将其绘制出,进行运动仿真,记录和研究其位移、速度和加速度等动力参数,最后分析出机构动作的可靠性。
使以后工作中,可以更准确掌握机械产品零部件的动力方面个参数,减少事故的发生,降低设计的难度。
关键词:凸轮;廓线设计;Pro/E;三维造型;仿真。
AbstractCam is a component with a surface profile is generally more dynamic pieces of the original (sometimes for the rack), when the cam piece to its original form, it is usually in a row for the constant rotation or move, and the follower output characteristics according to the requirements expected for continuous or reciprocating motion of the space, move, or the complexity of sports plane. This paper mainly introduces the general concept of the cam and cam profile design and calculation, and the latter the use of Pro / E software simulation of its profile.Cam cam curve design is the key to the design of methods commonly used analytical method and graphical method. In this paper, two such methods will be more or less analysis and application design, use of Pro/E software cam solid model rendering, and Pro / E software comes with the Pro/MECHANICA Motion cam plug design movement model, the kinematics Simulation can b a more accurate knowledge of machinery parts and components of displacement, velocity and acceleration, such as kinetic parameters, which can analyze the reliability of body movement.The main technical requirements are:familiar with the basic principles of cam design and related theoretical calculation; cam mechanism motion simulation and stress analysis; specify the contents of the translation and Pro/e application software proficiency.This article will focus on cam modeling, stress analysis and motion simulation and analysis. Through theoretical calculations and research, combined with graphical and analytical methods, calculate the approximate convex contour data, using Pro/E software to draw, simulation exercise, record and study the displacement, velocity and acceleration and other dynamic parameters, Finally, the reliability of the agency action. So after work, can be more accurate machinery parts and components of the dynamic parameters, to reduce accidents, reduce the difficulty of design.Keywords:Cam, Profile Design ,Pro/E, Three-dimensional shape,Simulation.目录1绪论 (1)1.1选题意义 (1)1.2 仿真技术的发展 (3)1.3 Pro/Engineer在机械制造中的应用 (5)1.3.1 Pro/Engineer软件介绍 (5)1.3.2Pro/E在我国机械行业中的应用 (8)2凸轮轮廓线的设计 (10)2.1绪论 (10)2.2 凸轮机构的分类 (11)2.2.1 按两活动构件之间的相对运动特性分类 (11)2.2.2 按从动件运动副元素形状分类 (11)2.2.3 按凸轮高副的锁合方式分类 (11)2.3从动件运动规律 (12)2.3.1 基本运动规律 (12)2.4 凸轮轮廓线的设计 (14)2.4.1凸轮轮廓曲线的计算 (14)2.5凸轮机构基本尺寸的确定 (17)2.5.1凸轮机构的压力角及许用值 (17)2.6.2凸轮理论轮廓的外凸部分。
UG机械设计实例教程 第3章 凸轮机构的建模与运动仿真

推程曲线
远休止曲线
回程曲线
任务实施
1.零件造型—从动件建模
任务实施
1.零件造型—机架建模
任务实施
2.装配—凸轮机构的装配
1
2
4
3 5
任务实施
3.运动仿真-基本流程
01
确定运动构件
02
确定两构件的运动副类型
03
确定原动件,即驱动运动副
04
确定驱动参数,求解
任务实施
3.运动仿真-操作过程
1 添加连杆
2 添加运动副
3 设置机架
4 添加驱动
5 仿真计算 7 运动播放与追踪
6 仿真结果分析
第三章 凸轮机构的建模与运动仿真
技能目标
01
掌握解析法绘制凸轮轮廓曲线
02
了解凸轮轮廓曲线设计编程
03
掌握 UG 表达式参数化建模方法
04
掌握凸轮机构运动仿真的基本操作
任务引入
凸轮是一个具有轮廓曲线或凹槽的构件, 凸轮转动会带动从动件实现预期的运动规律。
1-凸轮 2-滚子 3-从动件 4-机架
设计如图所示的滚子直动从动件盘形凸轮机构。 已知凸轮 1 匀速转动, 带动滚子 2 和从动件 3 运动, 输出运动为从动件的直线往复运动。 要求将凸轮机构建模并模拟仿真其运动规律。
凸轮机构运动仿真
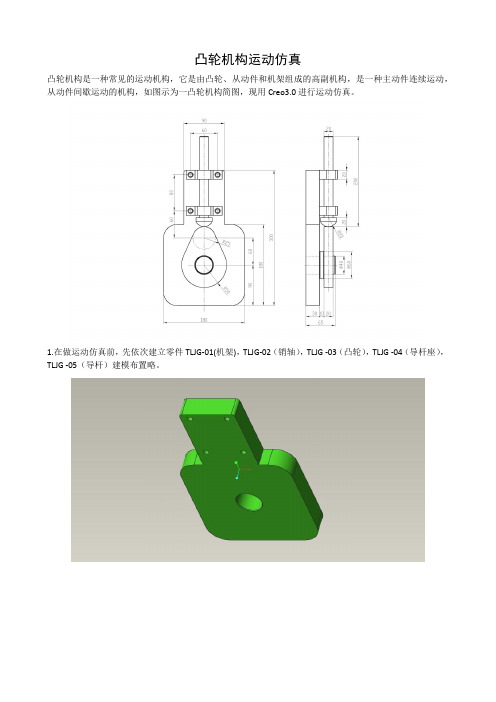
凸轮机构运动仿真凸轮机构是一种常见的运动机构,它是由凸轮、从动件和机架组成的高副机构,是一种主动件连续运动,从动件间歇运动的机构,如图示为一凸轮机构简图,现用Creo3.0进行运动仿真。
1.在做运动仿真前,先依次建立零件TLJG-01(机架),TLJG-02(销轴),TLJG -03(凸轮),TLJG -04(导杆座),TLJG -05(导杆)建模布置略。
2.打开Creo3.0,新建文件,输入名称TLJG-00,点选装配/设计,选择mmns_asm_design模板,确定,进入装配模式。
3.调入TLJG-01,选择默认装配模式,确定。
4.调入TLJG-02,重合约束:将TLJG-02的轴曲面与TLJG-01的轴孔曲面重合;TLJG-02的台阶内侧端面与TLJG-01的外侧端面重合;TLJG-02的RIGHT平面与ASM_RIGHT平面重合。
5.调入TLJG-03,销连接,轴对齐:将TLJG-03的轴孔中心线与TLJG-02的轴中心线对齐;平移:TLJG-03的内侧端面与TLJG-02的台阶外侧端面重合;旋转轴:将TLJG-03的RIGHT平面与ASM_RIGHT平面角度设为0,作为初始角度。
6.调入TLJG-04,添加3个重合约束,使TLJG-04与TLJG-01固定,再将TLJG-04阵列,数量2,距离80。
7.再调入TLJG-05,选择滑块模式,轴对齐:将TLJG-05的轴线与TLJG-04的轴孔中心线对齐;旋转:将TLJG-05的RIGHT平面与TLJG-04的RIGHT平面重合,完成。
9.进入应用程序/机构,选择凸轮模式,依次选择TLJG-03(凸轮1),TLJG-05(凸轮2)的曲面,完成。
10.新建伺服电机,类型选取TLJG-03的轴孔中心线为运动轴,轮廓选择速度,常量A为20,单位为deg/sec,即转一圈360°需要18s。
11.新建分析,首选项将结束时间设为18s,再选择电动机,运行。
用ADAMS进行凸轮机构模拟仿真示例

用ADAMS进行凸轮机构模拟仿真示例引言在机械工程领域,凸轮机构是一种常见的机构组成部分,广泛应用于工业生产和制造。
凸轮机构的设计需要考虑到凸轮曲线的形状和运动参数对传动性能的影响。
为了评估和优化凸轮机构的性能,我们可以使用计算机仿真软件进行凸轮机构的模拟仿真。
ADAMS是一款被广泛应用于机械系统仿真的软件工具,本文将通过一个示例来介绍如何使用ADAMS进行凸轮机构的模拟仿真。
凸轮机构概述凸轮机构是一种将轮廓复杂的凸轮运动传递给连杆的机构。
它通常由凸轮、从动件和驱动件构成。
凸轮是核心部分,它的轮廓决定了从动件的运动轨迹。
通过凸轮的运动,从动件可以实现往复、旋转或其他特定的运动方式。
凸轮机构在内燃机、机床、汽车等领域得到广泛应用。
ADAMS概述ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一款用于机械系统动力学仿真的软件工具。
它提供了丰富的建模元素,可以快速和准确地建立机械系统的模型,并通过求解动力学方程来模拟机械系统的运动。
ADAMS具有友好的用户界面和强大的计算功能,被广泛应用于机械工程领域的仿真和优化。
凸轮机构模拟仿真示例为了演示如何使用ADAMS进行凸轮机构的模拟仿真,我们将以一个简单的例子来说明。
假设我们要设计一个四连杆机构,其中一根连杆由凸轮驱动。
该凸轮的轮廓为心形曲线,从动件为简单的滑块。
首先,我们需要建立凸轮机构的模型。
在ADAMS中,可以通过创建凸轮、连杆、滑块等元素来建立凸轮机构的模型。
通过定义凸轮的曲线形状和连杆的运动参数,我们可以构建出凸轮机构的模型。
接下来,我们需要定义凸轮机构的运动条件。
在ADAMS中,可以通过设置凸轮的运动方式和频率来定义凸轮机构的运动条件。
根据凸轮的运动,ADAMS可以自动计算连杆的运动轨迹。
然后,我们可以进行凸轮机构的模拟仿真。
在ADAMS中,可以通过启动仿真来模拟凸轮机构的运动。
ADAMS会计算连杆的运动轨迹、速度、加速度等参数,并显示在仿真结果中。
凸轮机构设计及其动态仿真
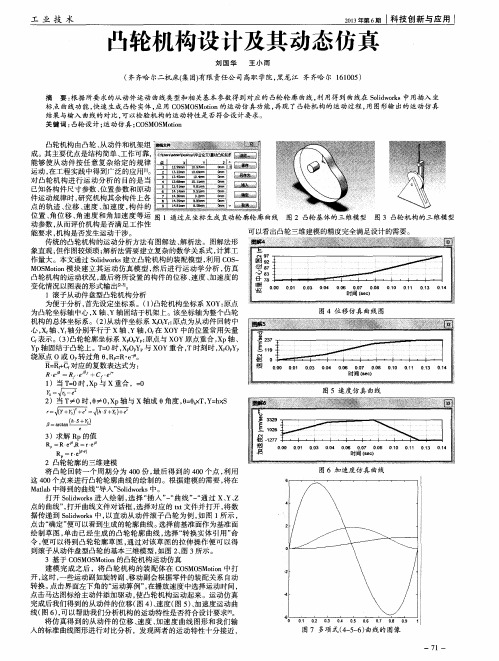
标 点 曲 线功 能 , 快 速 生成 凸轮 实体 , 应用 C O S M O SMo t i o n的 运 动仿 真 功 能 , 再现 了 凸轮机 构的 运 动过 程 , 用 图形输 出 的运 动 仿 真 结 果与 输 入 曲线 的 对 比 , 可 以检 验机 构的 运 动特 性是 否符 合设 计 要 求 。 关 键词 : 凸轮设 计 ; 运 动仿 真 ; C O S MO S Mo t i o n
R. e ∞ : R . e j 4 - C . e
图 4 位 移 仿真 曲线 图
1 )当 T = 0 时, x p与 x重合 ,= 0
:
图 5 速度 仿 真 曲线
2 )当 T ≠0时 , 0 ≠0 , X p 轴与 x轴成 0 角度 , 0 = 0 h X T , Y = h s
为 凸轮 坐 标 轴 中心 , x轴 、 Y轴 固结 于机 架 上 。该 坐标 轴 为 整个 凸轮 机构的总体坐标系 。( 2 ) 从动件坐标系 x f o f Y : 原点为从动件回转 中 心, X 轴、 Y f 轴分别平行于 x轴 、 Y轴 , O 在X O Y中的位置常用矢量 c 表示 。( 3 ) 凸轮轮廓坐标系 x P ( ) P Y : 原点与 X O Y原点重合 , x p轴、 Y p 轴 固结 于凸 轮上 。T = 0时 , x P 0 P Y 与X O Y重 合 , T时刻 时 , x P 0 P Y 绕 原点 0或 0 转过角 0 , R FR ・ e 。 R = R f + C , 对 应 的复 数表 达 式 为 :
图 6加 速 度仿 真 曲 线
图 7 多项 式 ( 4 - 5 — 6 ) 曲线 的 图像
一
71—
科技创新与应用 I 2 0 1 3 年 第6 期
基于Creo的凸轮机构三维参数化设计及运动仿真

基于Creo的凸轮机构三维参数化设计及运动仿真刘鹏冯立艳李静卢家宣蔡保杰冷腾飞苗伟晨(华北理工大学以升创新基地河北·唐山063210)摘要本文主要介绍用Creo对凸轮机构进行参数化设计并以圆柱槽状凸轮机构为例进行运动仿真,再通过C#软件完成人机交互,即操作人只需在程序界面输入槽状凸轮相应参数即可完成凸轮的三维建模,从而绘制出相应的位移、速度、加速度曲线进入仿真和分析环节。
这样即缩短了凸轮的设计周期提高了设计质量,并且解决了凸轮教学课程存在的设备成本高、设备数量少、实验时间和空间受限等难题。
关键词凸轮Creo参数化仿真中图分类号:TP391.9文献标识码:A1基于Creo软件下的凸轮三维建模1.1Creo环境下槽状凸轮机构三维参数化造型基本思路(1)参数化过程需准备可变参数包括行程、推程角、远休角、回程角、近休角、外径、壁厚、基底高度、凸轮高度、槽深、槽宽,以上变量成为参数组。
(2)通过根据凸轮不同运动规律编写推程、远休止、回程、近休止段凸轮轮廓线方程,本例应用的凸轮推程回程为正弦加速度运动规律。
(3)分段绘制出理论轮廓曲线,将各段曲线首尾相连封闭,即为完整的凸轮理论廓线。
(4)生成凸轮实体;加入参变量,实现参数化。
1.2三维建模具体步骤Creo是如今今应用最广的三维绘图软件之一,主要用于参数化实体设计,它所提供的功能包括实体设计、曲面设计、零件装配、建立工程图、模具设计、、电路设计、装配管件设计、加工制造和逆向工程等。
其系统特性主要包含单一数据库、全参数化、全相关、基于特征的实体建模等,不仅能实现零件的参数化设计,也可以方便地建立各零部件的通用件库和标准件库,从而提高设计的效率和质量。
1.2.1槽状凸轮机构的三位参数化建模自行设定初步参数组,注意推程角、远休角、回程角、近休角之和为360,(2)运行creo软件,新建零件,进入界面。
(3)选择【工具:程序】,出现菜单管理器,选择编辑设计,出现记事本,在IN PUT和END PUT语句中间输入语句,然后存盘,确认将所做的修改体现到模型中,最后在菜单管理器中输入设定的初步参数值。
用ADAMS进行凸轮机构模拟仿真示例
结果分析注意事项
确保模拟仿真的初始条件和参数设 置正确
注意模拟仿真的收敛性和稳定性
添加标题
添加标题
添加标题
添加标题
对比实际测试数据与模拟仿真结果, 确保一致性
考虑模拟仿真的误差和不确定性
THANK YOU
汇报人:XX
参数敏感性分析:研究模型参数对模拟仿真结果的影响,确定关键参数并分析其敏感性。
重复性验证:多次运行模拟仿真并分析结果的重复性,以评估模拟仿真的可靠性和稳定性。
模拟仿真结果优化分析
优化目标:提高凸轮机构的性能和效率
优化方法:采用多目标优化算法,对凸轮机构的关键参数进行优化 优化过程:通过ADAMS软件进行仿真实验,分析不同参数组合下的性能表 现 优化结果:得到最优参数组合,使凸轮机构性能达到最优状态
功能特点:ADAMS提供了丰富的建模工具和求解器,支持各种机械系统,包括刚体、柔性体和 刚柔耦合系统。
应用领域:广泛应用于汽车、航空航天、船舶、机械制造、能源等领域,用于产品设计和性能优 化。
优势:ADAMS提供了直观的图形界面和强大的后处理功能,使得用户可以方便地进行模型建立、 参数设置和结果分析。
对比分析不同 参数下的模拟 仿真结果,如 转速、压力角
等
输出凸轮机构 模拟仿真的最
优设计方案
总结输出凸轮 机构模拟仿真 结果对实际应 用的指导意义
用ADAMS进行凸轮机构模拟 仿真结果分析
模拟仿真结果准确性分析
对比实验:将模拟仿真结果与实际实验数据进行对比,验证模拟仿真的准确性。 误差分析:分析模拟仿真结果与实际实验数据之间的误差,判断误差是否在可接受范围内。
定义运动学参数和约束条件
设置凸轮机构运动参数
确定凸轮机构类型和尺寸 定义凸轮机构运动规律 设置凸轮机构接触参数 验证凸轮机构运动参数的正确性
凸轮机构廓线精确设计与运动仿真
凸轮机构廓线精确设计与运动仿真凸轮机构是一种广泛应用于机械领域的机械传动结构,它将圆周运动转化为直线运动或者非圆周运动,实现了复杂的工程问题。
在凸轮机构的设计过程中,廓线精确设计与运动仿真是非常重要的步骤,下面将对这两个方面进行详细介绍。
凸轮机构的廓线精确设计是指根据可行性分析、动力学分析、结构强度分析等多方面的因素,综合设计出符合机械系统要求的凸轮机构结构。
具体来说,主要有如下几个步骤:第一步,确定机械系统要求,包括传动功率、转速、加速度、负载、耐久性等因素。
第二步,进行可行性分析,包括选择凸轮的形状、尺寸、角度等条件,以确保凸轮满足运动要求。
同时,考虑到凸轮的加工难度、成本等因素,也需要进行制造工艺可行性分析。
第三步,进行动力学分析,包括利用运动学公式计算凸轮与从动件的相对位置、速度、加速度等参数,确定凸轮运动过程中从动件的运动特性。
第四步,进行结构强度分析,包括利用有限元分析等工具对凸轮、从动件等部件进行应力分析,确保结构在工作过程中的强度和稳定性。
第五步,进行凸轮机构整体设计,包括选用凸轮轴、从动轴、摩擦轮、压力轮、传动带等部件,确定凸轮轴、从动轴的轴承结构、固定方式等。
以上五个步骤的精确设计,可以确保凸轮机构在机械领域能够稳定可靠地工作,满足机械系统要求,实现有效的运动传递。
同时,为了更直观地了解凸轮机构的运动特性,还需要进行运动仿真。
凸轮机构的运动仿真,主要是对凸轮轮廓、从动件运动轨迹、运动速度、加速度等参数进行模拟和分析。
在进行运动仿真时,需要用到相应的仿真软件,如ADAMS,SIEMENS NX等。
具体来说,主要有如下几个步骤:第一步,通过CAD软件,绘制凸轮轮廓图,并将图形导入仿真软件中。
第二步,模拟凸轮的运动过程,将凸轮的运动参数输入到仿真软件中,包括凸轮角速度、位移、角度等。
第三步,设定从动件的初始位置及在凸轮运动过程中的运动方式,并进行仿真计算。
第四步,观察仿真结果,分析凸轮机构的稳定性、精度、寿命等参数,进行运动特性分析。
凸轮机构的虚拟设计与运动仿真
凸轮机构的虚拟设计与运动仿真
首先,在进行凸轮机构的虚拟设计和运动仿真之前,需要对机构的物
理特性以及设计要求进行分析和确认。
这包括凸轮轴的几何形状、凸轮与
被控件的运动规律和传动比等。
接下来,可以使用CAD软件绘制凸轮轴和被控件的几何形状。
在绘制
凸轮轴时,可以使用CAD软件提供的几何图形工具创建具有不同形状的凸
轮剖面。
在绘制被控件时,可以创建其对应的几何模型,并与凸轮轴进行
连接。
完成几何模型的绘制后,可以使用CAD软件中的运动仿真工具来模拟
凸轮机构的运动。
首先,可以为凸轮轴设置一个恒定速度的输入条件。
然后,可以通过设置凸轮轴与被控件之间的运动关系(例如凸轮与被控件的
接触点位置)来实现凸轮机构的运动仿真。
在进行运动仿真时,可以观察凸轮机构的各个部分的运动情况,并分
析其运动特性,以评估机构的性能。
例如,可以观察被控件的运动轨迹和
速度曲线,以确定被控件是否能够按照要求进行精确的运动。
如果发现机
构存在问题,可以通过调整凸轮轴的几何形状或修改运动关系来进行优化。
除了CAD软件,还可以使用专业的凸轮机构仿真软件来进行虚拟设计
和运动仿真。
这些软件通常具有更强大的仿真功能,可以提供更准确的分
析和评估结果。
通过使用这些软件,可以更好地理解和优化凸轮机构的运
动特性,并减少实际试验的次数和费用。
总之,凸轮机构的虚拟设计与运动仿真可以通过CAD软件或专业仿真
软件来实现。
通过这种方法,可以在设计早期阶段对机构进行分析和优化,从而减少实验和测试的时间和成本,提高设计效率。
Engineer和MATLAB凸轮配气机构的运动仿真
Engineer和MATLAB凸轮配气机构的运动仿真作为一名工程师,MATLAB和凸轮配气机构的运动仿真是我工作中不可或缺的技能。
凸轮配气机构是用于控制内燃机气门开闭的重要装置,它通过凸轮的转动驱动汽缸内的柄杆并带动气门运动。
而运用MATLAB进行凸轮配气机构的运动仿真便可以更精确地模拟设备运动并进行性能优化。
我在MATLAB中设计了一个凸轮配气机构模型,并利用其中的模拟工具箱中的Simulink进行动态仿真。
我们首先将内燃机的气门开启和关闭的比例进行优化,保证了最高效的功率输出。
之后,我们使用MATLAB的曲线拟合工具箱来获得不同气门开启和关闭时刻的角度和位置信息。
通过这些数据,我们可以确定最佳的凸轮轮廓。
在为凸轮进行仿真测试之前,我们需要确保真实机器的物理参数已经定义。
MATLAB经典的自适应计算方法可以在相对较短的时间内对不同的凸轮设计进行运动仿真测试,这有助于我们快速地判断各种不同参数下的设计的优劣。
仿真测试呈现了凸轮的不同状态下内燃机气门的开启和关闭过程。
开关气门的时间可以根据我们需要进行调整。
在进行模拟运算时,我们可以模拟不同转速下的内燃机运动,并在不同负载下测试内燃机的动力性能,这使得我们能够以客观的角度评估不同的凸轮设计,并选择最佳设计方案。
我们也可以使用MATLAB来获得不同凸轮形状的旋转速度和运动惯性等信息,这有助于我们进行可靠的控制系统设计。
以及这方面的进一步研究将为制造商提供更高效和可靠的凸轮配气机构设计,从而提高工业内燃机的性能和可靠性。
总的来说,作为一名工程师,MATLAB和凸轮配气机构的运动仿真技能可以帮助我简化产品设计过程,并提供更准确和可靠的性能评估。
通过利用动态仿真,我可以以客观的方法评估各种设计,并选择最佳的方案。
我相信,这些技能将在工业界得到更广泛的重视和应用,为制造商带来更多的商业利益和竞争优势。
数据分析是工程师工作中非常重要的环节,它能够让我们更好地了解产品性能并发现其中的问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
凸轮机构设计及其动态仿真
[摘要]根据所要求的从动件运动曲线类型和相关基本参数得到对应的凸轮轮廓曲线,利用得到曲线在Solidworks中用插入坐标点曲线功能,快速生成凸轮实体,应用COSMOSMotion的运动仿真功能,再现了凸轮机构的运动过程,用图形输出的运动仿真结果与输入曲线的对比,可以检验机构的运动特性是否符合设计要求。
【关键词】凸轮设计;运动仿真;COSMOSMotion
凸轮机构由凸轮、从动件和机架组成。
其主要优点是结构简单、工作可靠,能够使从动件按任意复杂给定的规律运动,在工程实践中得到广泛的应用[1]。
对凸轮机构进行运动分析的目的是当已知各构件尺寸参数、位置参数和原动件运动规律时,研究机构其余构件上各点的轨迹、位移、速度、加速度,构件的位置、角位移、角速度和角加速度等运动参数,从而评价机构是否满足工作性能要求,机构是否发生运动干涉。
传统的凸轮机构的运动分析方法有图解法、解析法。
图解法形象直观,但作图较烦琐;解析法需要建立复杂的数学关系式,计算工作量大。
本文通过Solidworks建立凸轮机构的装配模型,利用COSMOSMotion模块建立其运动仿真模型,然后进行运动学分析,仿真凸轮机构的运动状况,最后将所设置的构件的位移、速度、加速度的变化情况以图表的形式输出[2-3]。
一、滚子从动件盘型凸轮机构分析
为便于分析,首先设定坐标系。
(1)凸轮机构坐标系XOY:原点为凸轮坐标轴中心,X轴、Y轴固结于机架上。
该坐标轴为整个凸轮机构的总体坐标系。
(2)从动件坐标系XfOfYf:原点为从动件回转中心,Xf
二、凸轮轮廓的三维建模
将凸轮回转一个周期分为400份,最后得到的400个点,利用这400个点来进行凸轮轮廓曲线的绘制的。
根据建模的需要,将在Matlab中得到的曲线“导入”Soli dworks中。
打开Solidworks进入绘制,选择“插入”—“曲线”—“通过X、Y、Z点的曲线”,打开曲线文件对话框,选择对应的txt文件并打开,将数据传递到Solidworks中,以直动从动件滚子凸轮为例,如图1所示,点击“确定”便可以看到生成的轮廓曲线。
选择前基准面作为基准面绘制草图,单击已经生成的凸轮轮廓曲线,选择“转换实体引用”命令,便可以得到凸轮轮廓草图,通过对该草图的拉伸操作便可以得到滚子从动件盘型凸轮的基本三维模型,如图2、图3所示。
三、基于COSMOSMotion的凸轮机构运动仿真
建模完成之后,将凸轮机构的装配体在COSMOSMotion中打开,这时,一些运动副如旋转副、移动副会根据零件的装配关系自动转换。
点击界面左下角的“运动算例”,在播放速度中选择运动时间,点击马达图标给主动件添加驱动,使凸轮机构运动起来。
运动仿真完成后我们得到的从动件的位移(图4)、速度(图5)、加速度运动曲线(图6),可以帮助我们分析机构的运动特性是否符合设计要求[4]。
将仿真得到的从动件的位移、速度、加速度曲线图形和我们输入的标准曲线图形进行对比分析,发现两者的运动特性十分接近,可以看出凸轮三维建模的精度完全满足设计的需要。
本文利用凸轮轮廓设计程序所生成的轮廓曲线上的400个点,在三维软件Solidworks中进行了三维建模以及运动仿真。
利用导入txt函数文件的方法生成曲线;用“转换实体引用”转换成草图绘制以便拉伸完成基础建模;以及利用添加约束和添加马达以完成运动仿真。
为了与Matlab更紧密地连接,把动画保存为A VI格式文件,直接用命令将其插入Matlab中。
另外,对于动态仿真的结果和输出图像的分析,对于设计的检验和校正有很大的意义。