基于模糊控制的汽车建模仿真
并联混合动力汽车模糊控制策略设计与仿真_赵震
北京汽车0引言随着当今社会经济的快速发展,汽车已成为人们必不可少的交通工具,汽车虽然为人类的进步作出了贡献,但也给全球环境带来巨大的危害。
面对日趋严重的能源短缺与环境恶化问题,寻求社会经济与资源环境相互促进与协调发展,世界各国的汽车公司均在开发新型清洁动力汽车。
混合动力汽车采用发动机、电机和电池作为混合动力总成。
所以,混合动力汽车既具有电动车辆节约能源和超低排放的优点,又解决了电动车辆续驶里程不足的缺点。
混合动力汽车按驱动系统布置结构可分为串联、并联和混联3类。
并联混合动力总成的主要结构特点是发动机和电机根据路况扭矩需求的不同,同时或单独驱动。
如何实现需求转矩在发动机和电机之间的最优分配是并联混合动力汽车控制策略需要解决的主要问题。
控制策略的设计是混合动力汽车开发设计的关键,通过对控制策略的设计、仿真分析能够节省开发成本,提高产品设计效率。
文中以并联混合动力汽车为模型,在Matlab环境下开发出了合适的模糊逻辑控制策略。
然后利用Advisor2002的并联框架,通过嵌入该模糊逻辑控制模块,实现了并联混合动力汽车模糊逻辑控制策略的仿真。
1模糊控制策略1.1模糊控制策略的原理模糊逻辑控制策略的原理是对发动机、电动机和蓄电池同时进行优化控制,尽可能维持发动机在最优曲线上运转。
当电池的SOC(电池荷电状态)不足或过高,电机不能满足整车扭矩要求时,发动机会改变最优工作曲线,同时保持电机工作高效和维持电池的SOC在其合理区间内变化。
模糊逻辑控制策略的实现就是基于这样一个事实。
模糊逻辑控制策略通过对输入输出参数分别进行模糊化和反模糊化处理,避免了常规控制方法中复杂的查表和插值计算,能够提高相应速度和控制精度,能够解决复杂的非线性问题。
另外,模糊逻辑控制策略具有鲁棒性好的特点,使其更适用于控制车辆这样复杂的系统。
根据模糊控制的原理,文中选择整车需求转文章编号:1002-4581(2011)05-0018-04并联混合动力汽车模糊控制策略设计与仿真赵震,王铁Zhao Zhen,Wang Tie(太原理工大学车辆工程系,山西太原030024)摘要:利用模糊逻辑控制技术,设计出一种能够实现需求转矩在发动机和电机之间最优分配的模糊逻辑控制策略。
基于模糊控制的汽车半主动悬架的仿真研究

Vo 9 No 5 ll 2 0 1 0 6. 0
机 械研究 与应用
M ECHANI AL C RESEARCH & AP I PL CAT1 0N
第l 9卷
第 5期
20 0 6年 l 0月
基 于模糊 控 制 的汽 车半主 动悬架 的仿 真研 究 ’
c to a i n.
Ke r s u re ft e a tmo i o y e —a t e s s e so ;f zy c nr l r i lt n y wo d :q at ro u o b l b d ;s mi ci u p n i n u z o t l ;smua i h e v oe o
su y t o h smu ain b ig M ATLAB td hrug i lto yusn /Si ln ho h tte p ro ma e o y r ui emi a tv u p n in wih f z y mu ik s wst a h e fr nc fh d a c s l — c ie s s e so t u z c nr l r i te h n t a fp sie s s e so I i u c sf le a l fs mi— a tv us e so n v hc ed sg p l- o tol sbetrt a h to a sv u p n in. t sas c e su x mpe o e e cie s p n i n i e il e in a p i
真 和 分析 , 以验 证 控 制 算 法 的有 效 性 , 半 主动 悬架 在 车 辆 上 为
』・ = ・ : 一 :一 一 ; ( ・ ( ) n・ 一 ) ・
【 2 =k( 一 )+ m之 s
基于模糊控制的汽车主动悬架系统仿真研究
s s e so o h b v e s n o i i g t ea t mai o to h oy u p n i n frt e a o er a o sc mb n n u o t c n r l e r .Us gt e MA L / i l k f z y tob x, h c t i h T AB S mu i u z l o n n o w e i n d f z y c nr l rf rte a t e s s e so e d s e u z o t l h c i u p n i n,a d u d r te s me i p t o d t n ,a a y e n o ae g oe o v n n e h a n u n i o s n z d a d c mp rd c i l s me p r r n e p r me es o c ie s s e so d la d p s ie s s e so d 1 h i lt n r s l s o o e f ma c a a tr f t u p n i n mo e n a sv u p n in mo e .T e smu ai e u t h ws o a v o t a c ie s s e s n w t u z o t l ri sg i c nl etrt a h a sv u p n in o i e c mfr a d h n H ta t u p n i i f z y c n r l in f a t b t h n t e p s ie s s e s n r o o n a — v o h oe s i y e o d t d i g sa i t .Ex e i n h w h t h t d a et i e e e c a u rt e p a t a a p iai n o c ieS S l t b l y n i pr me t o s t a e s y h s c ran rf r n e v l e f h r ci l p l t f t U - s t u o c c o a v
基于整车的汽车半主动悬架系统模糊控制仿真研究
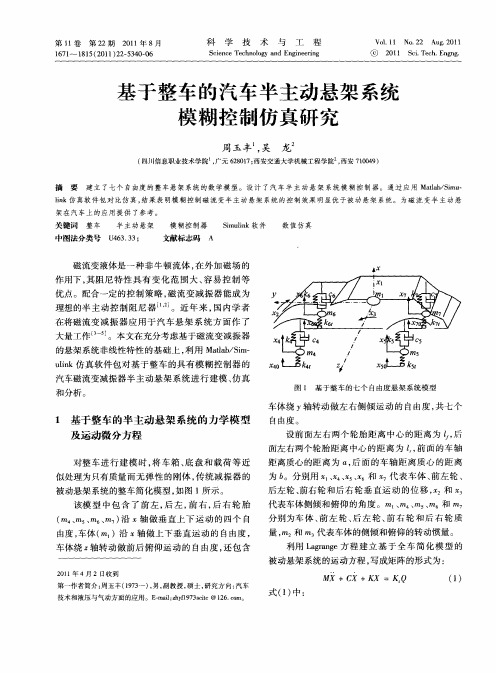
图 1 基 于 整 车 的 七 个 自由 度 悬 架 系 统 模 型
车体 绕 Y轴 转动 做 左 右侧 倾 运 动 的 自由度 , 七 个 共
1 基于 整车 的半 主动 悬 架 系统 的 力学 模 型 及运动微分方程
对整 车 进 行 建 模 时 , 车 箱 、 盘 和 载 荷 等 近 将 底
关键词 整车 中图法分类号
半主动悬架 U 6 .3 4 33 ;
模 糊控 制器 文献标志码 A
S uik软件 i l m n
数值仿真
磁 流变 液体是 一种 非 牛 顿 流体 , 外加 磁 场 的 在 作 用下 , 阻 尼 特 性 具 有 变化 范 围 大 、 易 控 制 等 其 容 优 点 。配合 一定 的控 制 策 略 , 流 变减 振 器 能成 为 磁 理想 的半 主 动 控 制 阻尼 器 【2。近 年 来 , 内学 者 1j . 国 在将磁 流 变 减 振 器 应 用 于 汽 车 悬 架 系 统 方 面 作 了
第 1卷 1
第2 2期
21 0 1年 8月
科
学
技
术
与
工
程
Vo.1 No 2 Au . 011 1 1 .2 g2
17 ~ 11 2 1 2 —30 0 61 8 5( 0 1) 2 5 4 — 6
S in e T c n l g n gn e i g ce c e h o o y a d En i e rn
由度 , 车体( m )沿 轴做上下垂直运动 的 自由度 ,
车 体绕 轴 转 动做 前 后 俯 仰 运 动 的 自由度 , 包 含 还
2 1 年 4月 2 口收 到 01
量 , , m 代表车体的侧倾和俯仰 的转动惯量 。 m 和
汽车电子稳定程序模糊控制仿真
中 图分 类 号 : 4 16 U 6 . 文 献标 识 码 : B
S m u a i n o z y Co t ol g f r Ve il P i l t fFu z n r l n o h ce ES o i
O in, AN L n—fn , AN Z a U Ja W G i e g F G h n—p n eg
第2 卷 第7 7 期
文 章 编 号 :0 6— 3 8 2 1 )7— 2 8— 4 10 9 4 (0 0 0 0 8 0
计
算
机
仿
真
20 月 0 年 王林峰 , 占鹏 房
( 重庆理工 大学汽车学院 , 重庆 4 0 5 ) 0 0 0
H B P cjat em d l r b i.V hc a t a ds es p a g ec o e steS nh s e o t l ai . . a e r o e ae ul e il y w r e n i l n l a h sna y te i d c n o vr — k i t e a d i er h z r a
基于MATLAB的汽车防事故模糊控制系统的设计与仿真
模糊控制理论是在美 国伯克莱加州大学电气 工程 系 L A Zdh . .ae 教授于 16 95年建立 的模糊集
模糊逻辑工具箱【 提供了两种方式来建立 3 模糊逻辑控制系统 , 即命令行方式和用 户图形界 面方式 ( U ) G I 。两种方式都 可 以完 成 同样 的功 能 , 后 一 种 方式 更 加 直 观 和 方 便 , 此 比较 常 但 因 用 。本文将重点介绍图形界面方式。在模糊逻辑 工具 箱 中有 5个 带有 图形 界 面 的基 本 工 具 , 它们 分别是模糊推理 系统 ( L) FS 编辑器 、 隶属度 函数 编辑器、 模糊规则编辑器 、 模糊规则观察器和曲面 观察器。这些 G I U 工具之 间是动态链接 的, 使用 它们中的任意一个对 FS的修改将影 响到任何其 I 它 已打开 的 G I U 中的显示 结果 。
程的路径图, 它是基于前面几点介绍 的模糊推理 方 框 图 。在这 个 图形窗 口中 , 有三 列小 图形 , 每一 列对 应 一 个 变量 。每 条 控 制 规 则 对 应 一 行 小 图
V0 . 3 No 3 12 .
文章编号 :0 7—18 ( 06 0 10 35 2 0 )3—0 1 0 0 6— 4
基于 M T A A L B的汽车防事故模糊控制系统的设计与仿真
王
( . 宁工程技术 大学电气 工程 系, 宁 阜新 1辽 辽
雷 陈
刚
130 ) 2 00
130 ;. 2 00 2 辽宁工程技术大学运筹学 与控制论研究所 , 辽宁 阜新
() 1 模糊推 理 系统 编辑 器 该 编辑 器 用 于设 计和显示模糊推理系统 的一些基本信息与参数。 如 图 1 在 窗 口的上 半 部 以 图形 框 的形 式 列 出 了 , 模糊 推理 系统 的基本 组成 部分 , 即输 人 模糊 量 、 模 糊规则 和输 出模糊 变 量 。
电动汽车用无刷直流电动机模糊控制系统的建模与仿真
络进 程 的必 经之 路 。本文提 出的建设 思路 和策 略对 TD — L T E室 内分布 系统规 划建 设具有 重要 的指 导意
义。
作者简介 : 陈永 安 ( 1 9 9 4 一 ) , 男, 本科 , 主要 从 事 通 信 工 程 等 方
面 的研 究 。 收 稿 日期 : 2 0 1 3 年 O 1月 0 4日
差, 存在超 调 , 达不 到高 性 能和 高精 度 的要 求_ _ 2 J 。考 虑到模糊控 制器具有快速性 、 稳 定性和鲁 棒性强 等优 点, 所 以采 用 了模 糊 控制 策略 。文献 1 - 3 3 利用 模 糊逻
辑控制器 调节 P I D各 参数 , 达 到 了模 糊控 制 的 目的 ;
0
0 ]
0 l
d £
l ld 6
d £
( 1 )
图 2 电压 平 衡 方 程 等 效 模 块
L—M l
d
d
2 . 2 反 电 动 势 模 块
2 . 1 电压平 衡方 程等 效模块 。
根据 式 1 , 得到 B L D C M 的 电压 平 衡 方 程 的 等 效模 型 , 如 图 2所示 , “ 。、 “ 、 “ 为三 相绕 组 的端 电
压; e 、 、 e 为 三相 绕 组 上 产生 的反 电动 势 ; i 。、
t e r f e r e nc e a bi l i t y a nd s o o n,w h i c h ma ke t h e s y s t e m ha s t h e be t t e r c o nt r o l a bi l i t y.
但模糊逻 辑规则数 和计算 量大 , 控制器 的实 时性难 以
汽车ESP系统模型和模糊控制仿真
汽车ESP系统模型和模糊控制仿真
欧健;房占鹏;王林峰
【期刊名称】《重庆邮电大学学报(自然科学版)》
【年(卷),期】2010(022)004
【摘要】汽车电子稳定系统(electronic stability program,ESP)是行驶车辆的一种主动安全系统.它综合了制动防抱死系统,驱动力控制系统和横摆力矩控制系统使行驶车辆的安全性得到很大地提高.建立了七自由度整车模型、magic formula轮胎模型以及车辆参考模型,采用车辆质心侧偏角的状态差异法,应用模糊控制理论设计了质心侧偏角反馈控制器,将建立的模糊控制器模型和汽车动力学模型组合起来,并通过前轮转角阶跃输入和正弦输入,在常见的易于失稳的湿滑路面上对典型工况进行仿真.结果表明:所设计的控制器可以很好地控制汽车的横摆角速度和质心侧偏角,提高了车辆的稳定性.
【总页数】5页(P516-520)
【作者】欧健;房占鹏;王林峰
【作者单位】重庆理工大学,重庆汽车学院,重庆,400050;重庆理工大学,重庆汽车学院,重庆,400050;重庆理工大学,重庆汽车学院,重庆,400050
【正文语种】中文
【中图分类】TP27
【相关文献】
1.汽车主动悬架与ESP系统协同控制仿真 [J], 张新;高洁;黄生豪
2.基于模糊控制的汽车ESP系统仿真 [J], 欧健;刘广明;陈毅挺;杨鄂川;张勇
3.汽车ESP系统模型与模糊仿真 [J], 付郁涵;陈文庆;张莹
4.汽车ESP系统联合控制仿真研究 [J], 张丽霞;孙杨;潘福全;陈肖媛
5.基于模糊控制的汽车ESP系统仿真研究 [J], 李松焱;闵永军;王良模;安丽华因版权原因,仅展示原文概要,查看原文内容请购买。
基于SIMPACK和MATLAB的汽车半主动悬架模糊控制及联合仿真
s se b s d o MPACK a d MATL y t m a e - n SI n AB
L U h o h a, EI h o y2Z I S a - u IB a - i, HAO Jn - o, HEN L n S ig b 2C og
( c ol f uo o i n ier g C a gh uIs tt o c a o i T c nlg ,h n zo 4 C ia h o o tm bl E gn ei , h n zo tue f S A e n n i Meht nc eh o yC agh u2 1 , hn ) r o 1 36
2基于 SM A K整车动力学模 型 IP C
21前悬 架模型 .
吕河 教型轿车前悬架采用麦弗逊式独立悬架。 SMP C 在 1 AK
★ 来稿 口 : 1— 2 1 -基金项 目: 期 2 10 — 0 k 0 江苏省科技支撑项 日( E 0 8 1 ) B 2 0 14 l前悬架模 拓扑 锂
we e r d c d b 0 6 , 80 % 。 04 % . 21 % r s e t ey c mp r d wi a sv u p n i n s se r e u e y 1 . % 1 .3 7 2 .8 1 .3 e p c i l o a e t p s ie s s e so y tm v h
应用于控制系统分析与设计的1具箱 , 二 对控制系统仿真技术的发
展 和应用起到巨大的推动作用IJ 。 应用 SMP C I A K和 MA L B软 TA
件对装有半主动悬架的昌河某微型轿 车进行整车动力学联合仿 真分析。采用 多体动力学软件 SMP C / A K建立整车动力学模型 , 利用 MA L BSm l k T A / ui 设计模糊控制器 ,通过建立车辆联合仿 i n 真 系统来进行控制 , 研究车辆半主动悬架系统行驶平顺性 。
基于模糊控制的汽车自适应巡航系统设计
and improves the accuracy and stability of the cruise process.
列问题,不断增加的汽车数量所带来的交通拥堵、能
身参数会发生变化,易对车辆动力性能和整车控制
源消耗、空气污染等方面的问题日益突出,提升汽车
器操作功能产生不利影响,进而影响驾驶体验甚至
的电动化及智能化水平作为解决包括降低能源消
导致控制器失效,因此设计与研究巡航系统模型与
耗、确保行车过程安全稳定、减轻驾驶负担等问题的
巡航控制及高速行驶中的定速控制(引导车辆大于
航系统及跟车巡航控制过程具有复杂性、非线性及
安全车距或前方无引导车辆时以预设车速行驶)及
不确定性的特点,该文以分层控制原理为依据,对车
距离控制(前方有车辆行驶于安全车距内且其速度
辆 巡 航 控 制 系 统(CCS,恒 速 行 驶 系 统)主 要 构 成 为
-171-
《电子设计工程》2021 年第 9 期
2.2.2
输出语言变量
对输出语言变量进行定义(共包含 3 个),即比
航和跟车巡航间自适应切换,通过模糊 PID 控制确
保系统性能的实现 [13]。
例 系 数 调 校 参 数(由 Kp′表 示)、积 分 系 数 调 校 参 数
3.1
Ti′、Td′对应的语言值均可定义为{零(Z),小(S),中(M),
在对控制系统模糊规则进行制定时,需对包括
车加速度、
车间距及速度误差等)为依据对当前车辆所
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图 2 横摆角速度增益随车速的响应曲线 ! 下转第 *+ 页 "
万方数据
吕其惠 等 & 液压挖掘机电液位置控制系统动态分析与仿真
!""# 年 ! 月
运动参数变化较大 !"#’ ( 之后 ! 曲线趋于平稳 ! 系统 处于稳定工况 $ 阻尼越大 !振荡越小 ! 超调量也越小 ! 表明增大阻尼 ! 系统的快速性降低 ! 但稳定性变好 $ 液压挖掘机工作装置电液比例控制系统是强非线性 时变系统 $
!! " 韩 健 保 # 云 志 刚 # 陈 厉 兵 " 汽 车 电 子 稳 定 系 统 12. 的 工 作 原 理 及 应用 !3 "" 汽车电器 #$%%* #&* ’" !$ " 王德平 # 郭孔辉 # 宗长富 " 车辆动力学稳定性控制的理论研究 !# " " 汽车工程 #$%%% #&! ’" !, " 韩 峻 峰 # 李 玉 惠 等 编 著 " 模 糊 控 制 技 术 !4 "" 重 庆 ( 重 庆 大 学 出 版 社 #$%%," !* " 张 国 良 # 曾 静 # 柯 熙 政 # 邓 方 林 " 模 糊 控 制 理 论 及 其 567869 应 用 !4 "" 西安 ( 西安交通大学出版社 #$%%$" !+ " 王 沫 然 编 著 # 陈 怀 琛 审 校 ":;5<8;=>* 建 模 及 动 态 仿 真 !4 "" 北 京 ( 电子工业出版社 #$%%$"
图 7 输入变量 8 和 89 的隶属函数
0 仿真结果及分析
采用变步长法对系统进行仿真$最小步长设定为
模糊控制器的输出变量为横摆力矩 $ 语言变量 量 化 为 ! 级 % -’ ! 零 "$ 正 小 !/,"$ 正 中 !/+ "$ 正 大 !/*"$ 论域为 ’3 "($隶属函数形状如图 % 所示 #
! 结束语
液压挖掘机实现工作装置轨迹规划和挖掘机器
图 ! 负载压力曲线
人化是未来发展方向 $ 通过对液压挖掘机工作装置 电液比例位置控制系统控制原理进行介绍 ! 在分析 其流量 ) 压力特性基础上 ! 建立了功率放大器数学 模型 % 电液比例阀阀口流量方程 " 液压缸流量连续方 程和液压油缸的运动方程 ! 对系统进行了仿真分析 $ 为液压挖掘机工作装置电液比例控制系统控制策略 和控制器控制算法选择提供依据 $
图 4 汽车系统受力图
立汽车 ’,/ 的仿真模型 $如图 ! 所示 #
,ABCD E6;= FGF 7H =<5 !:" ID=!: " M<SST *BU;A (B=7HB88DH
! 基于 "#$%#& ’ ()"*%)+, 汽车 -./ 系统的模 糊控制模型的建立
模糊逻辑控制器的输入变量为汽车的横摆角速 度偏差 ’ 和横摆角速度偏差变化率 ’( # 将输入变 量进行模糊化 $ 用语言变量表示为七级 % 负大 !)*"$ 负 中 !)+ "$ 负 小 !),"$-. ! 零 "$ 正 小 !/,"$ 正 中 !/+"$正大 !/* "# 取 ’ &’( 的论域均为 ’01 1($隶属 函数形状如图 2 所示 #
!!!!!! 汽车是一个非常复杂的非线性系统 " 数学模型
复杂 " 因此采用常规的控制理论很难达到预期的控 制效果 ( 而模糊控制系统由于不需要建立控制系统 的精确数学模型 " 可以避免因系统建模误差带来的 不良影响 ’ 其次 " 由于模糊控制器内的输入输出本身 就是模糊化语言 " 所以它不依赖于系统精确的物理 参数 "可以很好地适应系统的时变性 "使得模糊控制 具有很高的鲁棒性 ’再次 "汽车是一个人机交互频繁 的系统 " 而模糊控制使用易于掌握的自然语言进行 输入输出 " 所以具有简单实用的特点 ( 综上所述 "模 糊控制在汽车上的应用可以取得比传统控制理论更 好的控制效果 ( 而且 " 利用模糊控制 "可以利用较少 的状态量作为反馈控制信号 " 从而减少了传感器的 数量 "降低汽车控制成本 (
!"#$%&’$( F1P 7J >23 QM4I67L JIA3>M JMJ>36? 0> I==E73J >23 DGIR3J >@ >23 S327LE3 QM4I67LIEEM >@ =G3S34> >23 S327LE3 J7Q3JE7==745? BJ I L@6=E7LI>3Q 4@4E743IG JMJ>36 " 7>TJ Q7AA7LCE> >@ DC7EQ >23 ILLCGI>3 6@Q3E ID@C> >23 S327LE3U /J745 AC;;M L@4>G@EE745 >23@GM " N3 LI4 J@ES3 >23 =G@DE36 >2I> @>23G L@4>G@EE745 >23@GM LI44@> Q@U BLL@GQ745 >@ >23 L2IG>" N3 DC7EQ >23 6@Q3E @A >23 S327LE3 JMJ>36 " I4Q >234 " DC7EQ >23 AC;;M L@4>G@EE745 E@57L I4Q 636D3GJ27= AC4L>7@4 N7>2 J76CE74RU )*+ ,-%.#( AC;;M L@4>G@EE745 >23@GM ’ 6I>EID V J76CE74R ’ F1P’ J76CEI>7@4
"OO# 年第 ! 期 & 总第 Y’O 期 $
农业装备与车辆工程
$*+,-./0.+$/ 12.,34150 6 718,-/1 15*,511+,5*
9@U! "OO#
& $ K@>IEEM 年Y’O !""# !月
基于模糊控制的汽车 !"# 建模仿真
崔胜民 !林清芝
! 哈尔滨工业大学汽车工程学院 " 山东 威海 "#$%&’ # 摘要 ! !"# 是汽车主动安全系统 " 能够在极限工况下对汽车进行主动的制动干预达到防止车辆侧滑的目的 # 汽车 !"$ 是复杂的非线性系统 " 建立精确的数学模型困难 # 模糊控制可以解决传统控制理论对汽车控制不足的缺点 # 根据汽车 系统受力图建立汽车系统模型 " 在 %&’(&) 模糊控制编辑器中建立了模糊控制规则及模糊 控 制 隶 属 度 函 数 " 并 应 用 %&’(&) * +,%-(,./ 对汽车系统模型进行模糊控制仿真 # 关键词 ! 模糊控制 $%&’(&) * +,%-(,./ $ 汽车电子稳定程序 $ 建模仿真 中图分类号 ! 0123456 文献标识码 ! $ 文章编号 !%&#’(’%)! !!""# $"!(""()("*
#% #$ #$ #$ #% #& ’( )&
#& #$ #$ #% #& ’( )& )%
!" ’( #$ #% #& ’( )& )% )$
)& #% #& ’( )& )% )$ )$
)% #& ’( )& )% )$ )$ )$
)$ ’( )& )% )$ )$ )$ )$
/*
利用 567869 软件提供的模糊控制工具箱 $ 建立 模糊控制规则和隶属度函数 # 在 :;5<8;=> 模块中 $建
+JK*JL M<=A7;B= N<= :7DC
F # ,<97H6A7
!3 E6;=" I< O I7 PDH;Q67;QD !3 E6;=$
+<R
图 3 汽车 -./ 控制系统的仿真模型
在模型中 $ 汽车实际模型模块是通过传感器得 到的汽车横摆角速度值 $ 这里为了仿真需要 $ 将汽车 实际的模型模块设定为一个转换函数 #
参考文献 !! " 陈浩锋 " 非线性电液位置伺服系 统 的 自 学 习 滑 模 模 糊 控 制 !# "#
图 " 液压缸输出特性曲线
$ 机床与液压 %#$%%& &’ ’( !($)!(* ) !$ " 王 传 礼 # 丁 凡 " 对 称 四 通 滑 阀 控 非 对 称 液 压 缸 伺 服 系 统 动 态 特 性 研究 " 中国机械工程 !# "#$%%* && ’ (!+)!( ) !, " 张耀宏 # 液压挖掘机的机电一体化 !# "#$ 国外工程机械 %#!’’! &* ’(!-)$! ) !* " 赵瞻 # 郭淑 娟 " 基 于 电 液 比 例 位 置 系 统 的 模 糊 自 整 定 ./0 控 制 器 !# "#$ 机电工程 %$%%& &!! ’(+’)&! )
清晰化