基于COSM0SMotion软件的机构动态仿真与应用
SolidWorksMotion虚拟样机运动仿真

注意事项:在建立复杂运动副时,需要注意运动副之间的约束关系是否合理,避免 出现运动学奇异或动力学不稳定的情况。
运动仿真结果分析
运动学分析:对运动过程中各部 件的位置、速度、加速度等参数 进行计算和评估
SolidWorks Motion与 Adams软件无缝 集成,实现运动 仿真与动力学分 析的完美结合。
通过Adams软 件进行更深入 的动力学分析, 包括碰撞检测、 振动分析等。
方便地在 Adams软件中 进行优化设计, 提高产品的性 能和可靠性。
实现从 SolidWorks到 Adams的模型 传递,保持数 据的一致性和 完整性。
结果分析:通过仿真结果分析船舶推进系统的性能表现,如推进效率、稳定性等,为优化 设计和改进提供依据。
PART 07
SolidWorks Motion未来发
展与展望
新功能与技术趋势
人工智能与机器学习在SolidWorks Motion中的应用,提高仿真效率和准确性。 云技术与实时协作功能,实现异地团队共同进行运动仿真与分析。 虚拟现实与增强现实技术,提供更真实的运动仿真体验和可视化效果。
04 S o l i d W o r k s Motion高级功能
06 S o l i d W o r k s Motion应用案例
PART 01 添加章节标题
PART 02
SolidWorks Motion概述
定义与功能
添加标题
定义:SolidWorks Motion是一款基于SolidWorks平台的运动仿真插件,用于对机械系统进行运 动学和动力学仿真。
PART 06
基于COSMOSMotion的反转摆动从动盘形凸轮机构运动仿真

中图分类 号 :T 1.;T 3 文献标 识码 :A d i 03 6 /.s.0 2 6 7 . 1 . .4 H122 P 9 o: . 9isn1 0 — 6 32 00 0 8 1 9 i 0 4
d sg si p o d e i n i m r ve .
Ke y wor ds: CO S O S o in;r v res ng; c m e h ns ; e uain M M to e e s wi a m c a im m lto
0 引言
运 动 机 构 的 虚 拟 仿 真 己成 为 机 械 设 计 创 新 的有 力 工 具 ,运 用 虚 拟 仿 真 可 以 提 高 产 品 设 计 的 直 观 性 和 生 动 性 ,增 强 产 品 的 竞 争 力 。S l Wok oi rs软 件 是 一 优 秀 的 三 d
Em ul i n fRe e s ato o v r e Swi i e ng Dr v n Cam e h im o i n Ba e n M c an s M to s d o C0SM OS o i M ton
SUN o Ru ,SUN iBi Zh o— i Gu- n,LICh a Ho g, u n- n U u Bi Xi- n,LIYig n
摆 动 从 动 件 盘 形 凸 轮 机 构 .运 用 COS OS oin运 动 仿 真 软 件 对 反 转 摆 动 从 动 件 盘 形 凸 轮 机 构 进 M M t o
行 了运 动仿 真 ,得 出 了从 动件 摆杆 顶 尖 的运动 和 力 学曲线 ,对 曲线进 行 了一 定 的推 理 分析 ,为进 一 步的 外形 尺寸 和机 构参数 的 改进奠 定 了理论基 础 。 Leabharlann Juy. 01 l, 2 0
基于COSMOSMotion的机械臂三维虚拟仿真
3. 1模拟方 案的确 定 S0l i d们r ks 所具有的3D核心实体建模、cos MOSmot i on以
文章编号: 100l 一3997( 20l O) 12— 0092一03
机械设计与制造
Machi ner y Desi gn & Ma nuf a c t ur e
第12期 2010年12月
基 于 COSMOSMot i on的 机 械 臂 三 维 虚 拟 仿 真
刘志林苏丽 ( 哈尔滨工程大学自动化学院,哈尔滨150001) Thr ee—di menSi OnaI Vi r t uaI Si muI a t i On f Or mani puI at Or bas ed On COSMOSMOt i On
的运 动学和动 力学仿 真,得到 机构中 各零部件 的运动 数据,分 析 机构中零件的位移、速度、加速度 、作用力与反作用力等,并以图 形、动画、表格等多种形式输出运算结果。总之,c os Mos Mot i on 功能强大,求解可靠,仿真结果与 实际情况十分吻合,完全能够满 足用户对运动仿真的各种需求圈。
化,2006( 9) 6 Wi l l i 姗El Honey,Moh锄me d Ja吣hi di l ROB伊—Sl M:Aoboti c8 8i mul 鲥∞
en“∞nment 0n pe玛orl al comp ut e瑁l Robot i cs 肌d Aut ono咖 岫Sys t e吣, 1992( 19) : 171_179
本文以 蒸汽发生器 检修机械臂 为对象进行虚 拟仿真,寻 求以
solidwor k8为 工具 自 Ⅻ更 简 便、 高效 的 阢唧 }没 计 盛戮 【仿 真 的方 法 。
基于SimuWorks的船舶动力系统半实物仿真平台

船舶动力系统半实物仿真平台结构图管理主机设置训练的船型后,针对相应的训练课目,将船舶1号通风机电源2号通风机电源启 动停 止启 动停 止图4 操控人机交互界面图5 动力管系人机交互界面4 基于PLC的协同控制利用KingView实现船舶动力系统半实物仿真平台硬件设备系统的监控,可减少功能的细节实现和监控程序的架构关心,开发人员只要将组态功能予以组合并且赋予特殊的逻辑就能实现想要的功能。
平台开发过程中,首先需要的人机交互界面,其次定义所需的外部设备,然后定义内存变量和I/O变量。
内存变量用于服务于程序本身的运行,I/O变量则负责与外部设备进行数据交互。
PLC控制器从盘台中采集数据,存于实时数据库中,并将数据的变化发送给人机交互界面用动画的方式形象地表示出来;对控制设备输入信号,经仿真软件进行逻辑判断及仿真计算,通过PLC智能控制技术今 日 自 动 化34 | 2021.1 今日自动化Intelligent control technologyAutomation Today2021年第1期2021 No.1SH753型管道式烘丝机利用气流干燥原理,靠短时高温的作用去除梗丝内多余的水分,使其膨胀的体积固定下来,使处理后的叶丝水份达到11%~14%,填充值大于6.0 cm 3/g ,以满足卷烟工艺要求。
1 原理简介气流干燥烘丝机的欧宝燃烧炉由炉本体、燃烧器、助燃风机、电气控制系统组成,在整个工艺加工流程中,燃烧炉提供烘丝所需要的热能。
设备使用要求:炉内温度高于100 ℃时,必须使用空压气进行冷却,保证燃烧器点火头部位(即火焰探测器)不至于长期处在在高温环境下,延长火焰探测器的使用寿命。
因此,炉头空压系统是烘丝机的稳定运行的保障,对其的维护至关重要。
2 原因分析位于梗线SH753烘丝机端部的燃烧器,其炉头部位工作温度要求为80 ℃,生产过程通过人工开取手动阀持续供给空压气进行冷却,使炉头温度在80 ℃上下浮动且不超过100 ℃,以保证烘丝机稳定运行。
COSMOSMotion中文教程

Planar平面副
方向
轴2
连接点
轴1
原点
约束1个旋转,3个移动自由度
约束2个旋转, 1个移动自由度
Slide 15
常用的运动副类型
Fixed固定副 Screw螺旋副
移动和旋转轴
螺距
原点
约束3个旋转,3个移动自由度
约束1个自由度
2个构件可以不平行于移动和旋转轴,但2个构件的Z轴 应该平行且方向一致。
e 5
机构运动分析用户界面一览
Motion 力
Slide 6
机构运动分析用户界面一览
Slide 7
机构运动分析下拉菜单
Slide 8
选项对话框 - World
设置力和时间的单位
指定重力加速度,或者点击地 球图标重新设置重力加速度
在整体坐标系中快速指定重力 的方向
Slide 9
选项对话框 – 显示
Slide 2
机构运动分析 用户界面
下拉菜单 Motion 工具条
Motion 浏览器
Slide 3
机构运动分析用户界面一览
Motion 零件
指定可动的和固定的零件,并从零件中 定义主运动物体。
不考虑质量属性,定义零件初始的状态。
Slide 4
机构运动分析用户界面一览
Motion Joints
COSMOS/Motion 机构运动分析用户培训
目
COSMOS/Motion 用户界面............................................... 3 COSMOS/Motion 下拉菜单............................................... 8 选项对话框......................................................................... 9 基本连接类型 ................................................................... 13 Constraint Mapping ....................................................... 14 IntelliMotion Builder - Four bar Exercise .......................... 17 IntelliMotion Browser - Four bar Exercise ........................ 25 Joint Definition............................................................... 30 Piston Model for manual joint definition Exercise ............ 34 Joint Definition – Motion............................................... 42 Plotting Results in SolidWorks..................................... 47 Scissors Lift Exercise....................................................... 49 Linear Springs................................................................ 54 Linear Dampers.............................................................. 55 Torsional Springs .......................................................... 56 Torsional Dampers ........................................................ 57 Door Exercise .................................................................. 58 Governor Exercise ........................................................... 66 Applied Force................................................................. 71 Applied Moment............................................................. 72 Action/Reaction Force................................................... 73 Action/Reaction Moment............................................... 74 Impact Force .................................................................. 75 Electromechanical Switch Exercise ................................. 79 Punch Exercise................................................................ 86
平面六杆机构运动特性的解析算法及COSMOSMotion仿真

法和解 析法 。图解 法 形 象直 观 , 作 图较 烦 琐 , 但 运动 分 析 精 度低 ; 验法需 要 有专 门 的仪 器设 备 ; 析法 虽 然 需 要 实 解 建立复 杂 的数 学关 系 式 , 算 工 作 量大 , 其运 动分 析 精 计 但 度高 。随着计 算机仿 真 技 术 的 运用 及 软 硬 件技 术 的飞 速 发展 , 各种 三维 机械 设 计 软件 应 运 而 生 , 中 S l Wok 其 oi r s d 中的 C MOS t n运 动 仿 真 模 块 , 仅 其 内 嵌 AD— OS Moi o 不 AMS解算 器 , 且 操 作 简 单 , 获 得 构 件 的各 种 运 动 曲 而 可 线 。如果 将 连 杆 机 构 运 动 特 性 的 解 析 算 法 与 C MO— OS S t n运 动仿 真结合 起来 研究 , 方 面 可 以验 证解 析 法 Moi o 一 中所建立 的数 学模 型 的正确性 , 另一方 面可 以动 态 地观 察 连 杆机构 的运 动状况 , 证 机 构设 计 的合 理性 , 早 地 发 验 尽 现 问题 , 且通过 修 改仿 真 模 型 的参 数 , 速地 修 改 和 优 而 快
中, 知 曲柄 1 已 长 度 为 、 杆 连 2长 度 为 z、摇 、 杆 3长 度 为 Z, 、 机 架 4 长 度 为
、
构是否 满足 工作性 能要求 , 机构 是否 发生运 动干 涉等 。
传 统 的平 面 连 杆 机 构 的运 动 分 析 方 法 有 图 解 法 、 验 实
平面 连杆机 构是 由若 干 刚性 构 件用 低 副 ( 回转 副 、 移 动副 ) 联接 而成 的一 种机构 , 主要 优点 是 结构 简单 、 其 制造 容易 、 工作 可靠 , 能 够实 现 多 种 运 动规 律 和 运 动轨 迹 的 且
基于Solidworks的机械手三维建模及其运动仿真

5 结语
责任编辑:于淑清 收稿日期:2010-04-14
215
第 31 卷第 10 期
基于 Solidworks 的机械手三维建模及其运动仿真— ——夏学文,等
Vol.31No.10
1.1 机械手零部件的三维建模
的零部件会自动定义为固定静止的部件,然后依次
Solidworks 零部件的建模过程为: 首先选取合 插入 各 零 部 件 ,通 过 一 系 列 的 配 合 约 束 关 系 ,装 配
[5]吴序堂. 齿轮啮合原理[M]. 西安:西安交通大学出版社,2009. [6]刘鹄然,赵东福,宋德玉. 现代啮合理论[M]. 杭州:浙江大学出版
社 ,2008. 作 者 简 介 : 耿 金 萍 (1984- ),女 ,江 苏 徐 州 人 ,中 国 矿 业 大 学 机
电 学 院 ,研 究 生 ,机 械 制 造 及 其 自 动 化 专 业 ,电 话 :0516-83590278 , 电 子 信 箱 :gengjinping188@.
注意的问题。 有些零部件特征相当的复杂,例如铲 零部件”命令,依次如图 1 所示,排列各零部件,顺
臂爪臂的建模。 因为它的主体特征是一个比较复杂 序按照从上到下排列。 注意插入的零部件应该集中
的曲面,所以需要熟练曲面建模的命令。 曲面建模 在一个区域,不要过于分散,以便于下一步装配步
通过带 控 制 线 的 扫 描 曲 面 、放 样 曲 面 、边 界 曲 面 以 骤 。 (3)装 配 时 ,将 所 有 的 零 部 件 通 过 “重 合 ”、“平
1.2 机械手的装配 Solidworks 提供了强大的装配功能,其优点为:
(1)在 装 配 体 环 境 下 ,可 以 方 便 地 设 计 及 修 改 零 部
基于COSMOSMotion与MATLAB的机器人运动学仿真
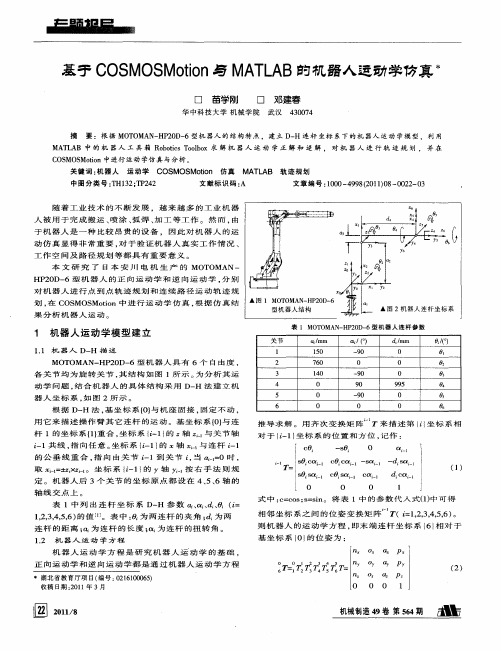
随 着 工 业 技 术 的 不 断 发 展 .越 来 越 多 的 工 业 机 器 人 被用 于完 成搬 运 、 涂 、 焊 、 工 等工 作 。然 而 , 喷 弧 加 由 于 机 器 人 是 一 种 比 较 昂 贵 的设 备 。 因 此 对 机 器 人 的 运 动 仿真 显得 非 常重 要 , 于验 证机 器 人 真实 工作 情况 、 对 工 作空 间及 路径 规 划等都 具 有重要 意 义 。 本 文 研 究 了 日本 安 川 I电 机 生 产 的 M0T OMAN— HP 0 6型 机 器 人 的 正 向 运 动 学 和 逆 向 运 动 学 , 别 2 D一 分 对 机 器 人 进 行 点 到 点 轨 迹 规 划 和 连 续 路 径 运 动 轨 迹 规 划 , COS 在 MOS t n 中 进 行 运 动 学 仿 真 , 据 仿 真 结 Moi o 根
0
.
P a Py y P:
0
一
_ 一 3 4 5 l 2
。
r4
( 2)
0
0 O
1
2)1 8 1 / 1
机械制造 4 卷 第 54 9 6 期
0 0
d 3/ l (0
一
0
l
式 中 : ̄ o ;= i 。 将 表 1中 的 参 数 代 入 式 () 可 得 e e s s sn 1中
123456 的 值 [ 表 中 : 为 两 连 杆 的 夹 角 ; 两 ,,,,, ) 。 d为 连 杆 的 距 离 ;4 连 杆 的 长 度 ; 为 连 杆 的 扭 转 角 。 o为
机 器人 运 动 学 方 程是 研 究 机 器人 运 动 学 的基 础 . 正 向 运 动 学 和 逆 向 运 动 学 都 是 通 过 机 器 人 运 动 学 方 程
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
万方数据 47
基于COSM0SMotion软件的机构动态仿真与应用
作者: 作者单位: 刊名:
英文刊名: 年,卷(期): 被引用次数:
曹桂霞, 冯长建, 宁晓丹, 刘丽 曹桂霞,冯长建,宁晓丹(大连民族学院,116600), 刘丽(阜新煤电集团公司,123000)
中国科技信息 CHINA SCIENCE AND TECHNOLOGY INFORMATION 2005,""(14) 6次
COSMOSMotion可分别按位移、速度或加 速度定义各种运动,包括定值、步进、谐波、样 条曲线和函数等运动。另外,该软件完全支持MDI 公司著名的仿真软件ADAMS提供的函数{4I。还 可以模拟系统各种受力情况,包括拉压弹簧和扭 转弹簧、拉压阻尼和扭转阻尼、作用力、作用力 矩、反作用力、反作用力矩和碰撞力等。还有独 特而实用的接触(点线接触,即丽个零件在作相 对运动时,一个零件上的某一点可以沿另一个零 件上某一曲线运动;线线接触,即两个零件在作 相对运动时,一个零件上的某一曲线始终或间断 的与另一个零件上某一曲线上相接触)和耦合定 义功能,因此,用COSMOSMotion可以建立各种 复杂的实际系统的精确运动仿真模型。
过仿真动画直接观察系统运动情况;还可以将结 果输出为通用的AVI格式动画;若想在互联网上 传输展示仿真结果,可以输出为VRML格式的动 画;可以输出到Excel表格中,以表格或图形的形 式显示数据{可以输出为Text文件; 当然还有 功能强大、内容丰富的各种XY图形输出。
总之,COSMOSMotion功能十分强大,且求
3,C0酾^OsI、^0tion软件的功能
3.1,COSMOSMotion中的运动副【l 3I COSMOSMotion软件支持多种约束,包括转 动副、移动副、圆柱副、球面副、万向节、螺纹 副、平面酉mlin固定约束。还支持共点、共线、共 面、平动、平行轴、垂直等虚约束。 3.2,COSMOSMotion中的运动和载荷【l 31
2.学位论文 廖伟 非圆齿轮行星系分插机构的优化设计和动态仿真 2009
水稻机械化种植是提高插秧效率、增加农民收入的主要措施之一。但是中国目前水稻机械化面积只占到水稻种植总面积的2.8%。目前在市场上销售 的各种乘坐式高速插秧机,其关键部件--分插机构,大部分都是R本的偏心齿轮分插机构或是椭圆齿轮分插机构,并且都已被日本申报了专利保护。为了 实现乘坐式高速插秧机的国产化,就必须设计出具有自主知识产权的分插机构,该分插机构能够适应我国不同地区的插秧要求,能提高我国水稻种植机 械化水平。本论文发明的非圆齿轮分插机构就是在此背景下诞生的。并申报了两个发明专利(200810162111.7;200810162112.1)。<br> 本论文首先分析了非圆齿轮节曲线的设计和齿廓的设计方法,然后以非圆齿轮分插机构的运动学数学模型为基础,以运动轨迹为优化目标开发了非圆齿 轮分插机构辅助设计与优化软件,并建立了虚拟样机进行了动态仿真分析。本论文主要研究内容和结果如下:<br> 1)对非圆齿轮节曲线的设计和齿廓的设计进行了研究,并对不同的非圆齿轮传动平稳性进行了比较。利用包络法原理建立了非圆齿轮齿廓的数学模型并 开发了非圆齿轮齿廓设计软件。为非圆齿轮的高精度制造扫除了障碍。使非圆齿轮分插机构在实际生产中的应用成为可能。<br> 2)为提高插秧质量,对非圆齿轮行星系分插机构的运动特性进行了研究,建立了巴斯噶蜗线齿轮分插机构的运动学数学模型,对该机构的位移、速度、 加速度进行了研究。为非圆齿轮分插机构辅助设计与优化软件的开发提供了数学模型。<br> 3)提出分插机构优化的目标函数。然后利用VB6.0平台开发了非圆齿轮分插机构辅助设计与优化软件。该软件具有良好的工作界面,便于设计者进行理 论分析和参数优化,图形具有形象直观,信息量大等特点。通过辅助设计与优化软件,获得一组优化参数:a0=70°,ψ0.49°,l=19.9969mm,b=3.2mm,S=155mm,δ0=0,ω=200r/min,α=40.4965mm,株距为13.mm,这组优化参数下取秧角=12.58°,推秧角 =72.08°,两角差值59.50°,相对运动轨迹为腰子形,绝对运动轨迹高度295mm,能够适应大苗的插秧要求,可以同时满足南方和北方地区不同的插秧 要求。<br> 4)按照优化参数结果进行了非圆齿轮分插机构的整体结构设计,并在AutoCAD下完成了装配图,同时分析了在设计中应该注意的问题。<br> 5)建立了巴斯噶蜗线齿轮分插机构的三维模型,完成了虚拟装配和虚拟样机的开发。基于ADAMS分析软件对所设计的分插机构进行动态仿真和分析,动 态仿真得到的运动轨迹和辅助设计与优化软件理论计算得出的轨迹高度吻合。相互印证了运动学数学模型和虚拟和辅助设计与优化软件理论计算得出的 轨迹高度吻合。相互印证了运动学数学模型和虚拟样机的正确性。
当然也可以直接由COSMOSMotion进行定义。本 例中遇到的是旋转副、移动副和万向铰,如图2中 的约束标记所示。然后设置曲柄绕曲柄座运动副 的运动初始状态,本例中设置旋转速度为360度/ 秒钟。上述内容设置完毕就可以通过点击仿真按 钮进行仿真,而且系统还可以录制动画,并生成 动画文件,以便于进行对比分析。在仿真过程中 可以测量任何构件上任何点的速度和加速度,还
科技论坛
中国科技信息2005年第14期
CHINA SCIENCE AND TECHNOLOGY INFORMATION Jul.2005
基于CⅨ溯0SMotion软件的机构动态仿真与应用
曹桂霞1冯长建1宁晓丹1刘丽2 (1,大连民族学院 1 1 6600; 2,阜新煤电集团公司 123000)
摘要: 介绍了与SolidWorks软件无缝集成的机械运动仿真软件COSMOSMotion的功能和技术特点,通过一个机构的仿真实例,展示了该软件在机构动态
参考文献(4条) 1.SolidWorks Inc.COSMOSMotion User,s Guide 2004 2.喻宏波.王玉敏.王玉新 多杆空间机构三维实体仿真 1999(09)
3.阮静.郗向儒.韩锐 基于SolidWorks开发的机构运动方案设计虚拟实验系统[期刊论文]-山东理工大学学报(自然
行校核。
5。结束语
通过实例分析可以 看出,利用机械动态仿
建好三维模型后,在装配模块下直接进入仿
真环境。在进行仿真之前,应先进行与仿真相关 的基本参数设置,如力的单位、时间单位,重力 加速度大小,以及与动画有关的帧时间间隔及帧 数等。例如,在本例的仿真中,设置力的单位是 N,时间的单位是s,仿真动画的时间间隔是0.02s, 帧数为1 oo(根据仿真精度要求适当调节时间间隔 和帧数)。利用S 0 1 i d w 0 r k S插件工具 COSMOSMotion的智能运动构建器,把曲柄座和 机械臂座进行固定。幸运的是COSMOSMorion可 以自动识别Solidworks装配体零件之间的约束副,
现模型动态交互更新。经过分析干涉的原因是由
于机械臂的棱边所引
暄的,于是把棱边进行
到圆处理,如图6YKr示,。
修改后的模型,再
欠进行运动仿真,干涉
圈5检测出的:’涉部
现象消失了。 上述只是曲柄滑块
机构仿真的简单实例,此外,COSMOSMoffon输
出的运动载荷还可以和有限元软件进行结合,从
而对运动构件的强度进
科学版) 2004(01) 4.郑建荣 ADAMS虚拟样机技术入门与提高 2002
相似文献(10条)
1.期刊论文 李盛年.汪发根.蒲如平.李平 基于Simulink的两自由度并联调姿机构动态仿真 -机械2004,31(2)
介绍了一种两自由度的并联微动调姿机构的结构特点,推导出调姿机构的运动学逆解,以及其速度方程和加速度方程,并且运用MATLAB/Simulink实现 了机构动态仿真,进行仿真计算,最后给出相应仿真结果.
3.期刊论文 苏成云.杜健民.李旭英.白雪卫.陈淑英.SU Cheng-yun.DU Jian-min.LI Xu-ying.BAI Xue-wei.CHEN
Shu-ying 高密度压捆机插草机构的动态仿真 -内蒙古农业大学学报(自然科学版)2007,28(2)
用传统方法对多体机构运动学分析较困难,本文利用ADAMS多体系统仿真分析软件对高密度压捆机插草机构进行了动态仿真,得出了满足设计要求的各 构件的最优化尺寸,为插草机构及压捆机的结构改进提供依据.
是进行零件之间 的干涉检查,本
例通过机构运动仿真分析,进行干涉检查,结果
发现在万向铰附近的机械臂的棱边和万向铰之帕j
存在运动干涉,如图5所示。
通过运动仿
真分析发现零 件存在干涉后,
可以直接在装
配体环境下修
圉4滑环仿翼运动加速度圈输出
改发生干涉的 零件,而且装配
体零件中的修改可以直接反映在零件模型上,实
1,经由万向铰传
圈2曲柄橱块结构装配
递到机械臂,机械 臂带动连杆2运
动,连杆2又带动滑环在滑轴上运动。因此该机
构把曲柄的旋转运动转化为曲柄旋转轴线上的一
可以计算约束副之间的支反力。图3和图4分别 表示滑环仿真过程中运动的速度和加速度图。
4.3,动态干 涉检查和模型的
改进
运动仿真的
一个重要内容就
圈3滑环伯真运动速度图输出
2,Co酾帕sMot.on软件的特点
COSMOSMotion是一个全功能运动仿真软 件,与当今主流的三维CAD软件SolidWorks无 缝集成,可以对复杂机械系统进行完整的运动学 和动力学仿真,得到系统中各零部件的运动情况, 包括位移、速度、加速度和作用力及反作用力等。 并以动画、图形、表格等多种形式输出结果,还 可将零部件在复杂运动情况下的复杂载荷情况直 接输出到主流有限元分析软件中,从而进行正确 的强度和结构分析。
—j 得的结果与。实际非常吻合,可以满足用户对运动j
仿真分析的各种需求。