单片机与上位机通信协议的制定解析
单片机与外部设备的通信协议解读与应用实践

单片机与外部设备的通信协议解读与应用实践单片机是指在一个芯片上集成了中央处理器、存储器、输入输出设备和通信设备等功能的微型计算机系统。
它广泛应用于各种电子设备和嵌入式系统中,实现对外部设备的控制和数据传输。
为了实现单片机与外部设备之间的通信,需要采用一种通信协议,以确保数据的可靠传输和正确解析。
本文将对常见的单片机通信协议进行解读,并结合实例进行应用实践。
一、串行通信协议串行通信协议是一种将数据位逐位地传输的通信方式,常见的串行通信协议包括UART、SPI和I2C等。
1. UART(通用异步收发传输)UART是一种通用的异步串行通信协议,用于单片机与外部设备之间的数据传输。
UART使用起始位、数据位、校验位和停止位来组成一个完整的数据帧。
通过波特率的设置,可以实现不同的数据传输速率。
UART通信协议简单易用,广泛应用于各类串行设备间的通信。
2. SPI(串行外设接口)SPI是一种同步串行通信协议,用于连接单片机与外部设备,例如存储器、传感器等。
SPI协议使用一个主设备和一个或多个从设备之间的全双工通信方式。
通信过程中,主设备通过时钟信号控制数据的传输,从设备通过选择信号确定通信目标。
SPI通信速度较快,适用于对速度要求较高的应用场景。
3. I2C(串行外设接口)I2C是一种双线制串行通信协议,用于各种设备间的通信,例如传感器、显示器等。
I2C通信协议使用两根总线线路:串行数据线(SDA)和串行时钟线(SCL)。
通过主设备发出的时钟信号控制数据的传输。
I2C协议具有多设备共享同一条总线的特点,适用于多个设备之间交互数据的场景。
二、并行通信协议并行通信协议是一种同时传输多个数据位的通信方式,常见的并行通信协议有8位并行、16位并行和32位并行等。
并行通信协议在数据传输速度上具有明显优势,但在布线和硬件接口上相对复杂,因此一般适用于短距离和高速数据传输的场景。
三、无线通信协议随着无线通信技术的发展,越来越多的单片机应用采用无线通信协议与外部设备进行数据传输。
合同制定方法单片机与上位机通信协议的制定
合同制定方法单片机与上位机通信协议的制定合同制定方法:单片机与上位机通信协议的制定一、引言在现代科技的发展中,单片机与上位机通信的需求越来越多。
单片机作为一种集成电路,具有计算、控制和存储等功能,而上位机则提供更强大的计算和存储能力。
两者的结合可以实现更复杂的控制和数据处理任务。
然而,在单片机与上位机通信过程中,需要制定一种通信协议,确保双方的信息交换能够顺利进行。
本文将介绍合同制定方法:单片机与上位机通信协议的制定。
二、背景单片机与上位机通信的目的在于实现数据的传输和控制命令的交互。
因此,在制定通信协议之前,需要明确通信双方的需求和目标。
1. 确定通信目的首先,需要明确单片机与上位机通信的目的。
是用于数据采集和显示?还是用于远程控制和监测?不同的通信目的将影响通信协议的设计和实现。
2. 确定通信方式通信方式包括串行和并行通信。
串行通信一般使用UART或SPI等协议,而并行通信则通过并口实现。
在选择通信方式时,需要考虑通信速率、数据传输距离和抗干扰能力等因素。
3. 确定通信协议通信协议是单片机与上位机之间信息交换的规范。
通常情况下,通信协议包括帧格式、通信协议头、数据校验等内容。
在制定通信协议时,需要考虑以下因素:- 帧格式:确定数据传输的起始位、数据位、校验位和停止位等信息。
- 通信协议头:用于标识数据包的类型和长度。
- 数据校验:确保数据传输的准确性和完整性,常用的校验方式包括校验和、CRC等。
三、制定通信协议步骤1. 确定通信需求首先,明确单片机与上位机通信的需求和目标。
确定通信的目的、通信方式和通信频率等。
2. 设计帧格式根据通信需求,设计合适的帧格式。
确定数据起始位、数据位、校验位和停止位等信息。
3. 设计通信协议头设计通信协议头,用于标识数据包的类型和长度。
通常可以使用固定长度或变长长度的方式进行设计。
4. 确定数据校验方式根据通信需求和数据传输的可靠性要求,选择合适的数据校验方式。
单片机的通信接口及通信协议概述

单片机的通信接口及通信协议概述随着科技的快速发展,单片机已经成为许多电子产品的核心部分。
而单片机的通信接口及通信协议则扮演着连接与控制外围设备的重要纽带。
本文将对单片机的通信接口及通信协议进行概述,帮助读者了解单片机通信的基本原理与应用。
一、串行通信接口串行通信接口是单片机与外部设备进行数据传输的一种常用方式。
它通过将数据一位一位地顺序传送,使得通信过程更加可靠。
常见的串行通信接口有UART、SPI和I2C。
1. UART(Universal Asynchronous Receiver Transmitter,通用异步收发器):UART是一种最基本的串行通信接口,实现简单,广泛应用于单片机的串口通信。
UART通过将数据以异步的方式进行传输,即发送端和接收端的时钟不同步,可以实现双向通信。
2. SPI(Serial Peripheral Interface,串行外围接口):SPI是一种同步的串行通信接口,适用于单片机与外部设备之间的高速数据传输。
SPI通信主要通过四根线进行,分别是时钟线、数据输入线、数据输出线和片选线。
SPI可以支持单主单从、单主多从和多主多从的通信方式。
3. I2C(Inter-Integrated Circuit,集成电路互连):I2C是一种双线制的串行通信接口,适用于单片机与多个外部设备之间进行数据传输。
I2C接口通常有两根线,即串行数据线(SDA)和串行时钟线(SCL)。
I2C采用主从模式,其中主机由单片机担任,从机可以是各种外围设备。
二、并行通信接口并行通信接口是一种同时传输多个位的通信方式,可以实现更高的数据传输速率。
常见的并行通信接口有GPIO(General PurposeInput/Output,通用输入输出)、外部总线接口等。
1. GPIO:GPIO是单片机通用的输入输出引脚,可以用来与外部设备进行并行通信。
通过对GPIO引脚的电平控制,单片机可以进行数据的输入和输出。
单片机和上位机协议

单片机和上位机协议一、引言随着科技的快速发展,单片机在各个领域得到了广泛的应用。
而单片机与上位机之间的通信协议也成为了重要的研究方向。
本文将探讨单片机与上位机之间的通信协议,包括协议的基本原理、常见的协议类型以及它们的应用场景等。
二、单片机与上位机之间的通信协议基本原理单片机与上位机之间的通信协议是为了实现两者之间的数据交换和通信而设计的。
协议的基本原理是通过一定的规则和约定,实现数据的传输和解析。
常见的单片机与上位机通信协议包括串口通信、USB通信、以太网通信等。
其中,串口通信是最常见和简单的通信方式。
它通过串口线将单片机与上位机连接起来,通过发送和接收数据来实现通信。
串口通信具有成本低、易于实现等优点,广泛应用于各个领域。
三、常见的单片机与上位机通信协议类型1. 串口通信协议串口通信协议是最常见和简单的通信方式。
它使用串口线将单片机与上位机连接起来,通过发送和接收数据来实现通信。
常见的串口通信协议包括RS232、RS485等。
RS232是一种标准的串行通信接口,广泛应用于计算机、工业自动化等领域;RS485是一种多点通信协议,支持多个设备同时通信,适用于工业控制系统等应用场景。
2. USB通信协议USB通信协议是一种高速、可靠的通信方式。
它通过USB接口将单片机与上位机连接起来,实现数据的传输和通信。
USB通信协议具有带宽大、速度快等优点,广泛应用于外设设备、嵌入式系统等领域。
常见的USB通信协议包括USB1.1、USB2.0、USB3.0等。
3. 以太网通信协议以太网通信协议是一种广域网通信协议,它通过以太网接口将单片机与上位机连接起来,实现数据的传输和通信。
以太网通信协议具有传输速度快、可靠性高等优点,广泛应用于局域网、互联网等领域。
常见的以太网通信协议包括TCP/IP、UDP等。
四、单片机与上位机通信协议的应用场景单片机与上位机通信协议在各个领域都有着广泛的应用。
在工业控制领域,单片机与上位机通信协议被用于监控系统、物联网等方面。
PIC18单片机的CANopen通信协议解析
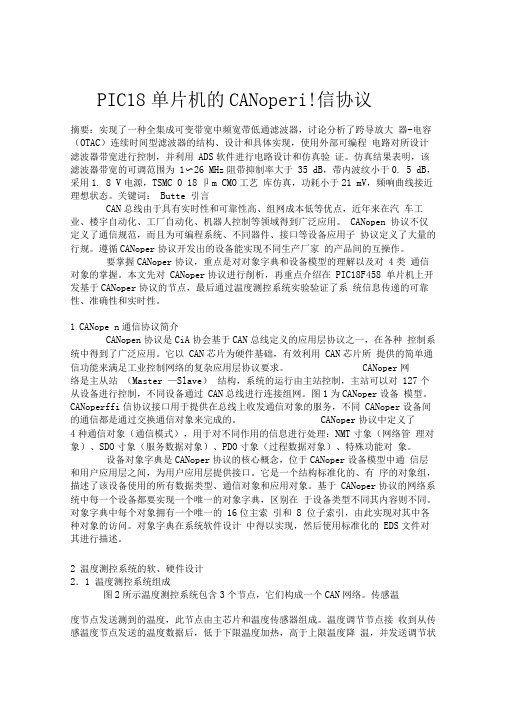
PIC18单片机的CANoperi!信协议摘要:实现了一种全集成可变带宽中频宽带低通滤波器,讨论分析了跨导放大器-电容(OTAC)连续时间型滤波器的结构、设计和具体实现,使用外部可编程电路对所设计滤波器带宽进行控制,并利用ADS软件进行电路设计和仿真验证。
仿真结果表明,该滤波器带宽的可调范围为1〜26 MHz阻带抑制率大于35 dB,带内波纹小于0. 5 dB,采用1. 8 V电源,TSMC 0 18卩m CMO工艺库仿真,功耗小于21 mV,频响曲线接近理想状态。
关键词:Butte 引言CAN总线由于具有实时性和可靠性高、组网成本低等优点,近年来在汽车工业、楼宇自动化、工厂自动化、机器人控制等领域得到广泛应用。
CANopen 协议不仅定义了通信规范,而且为可编程系统、不同器件、接口等设备应用子协议定义了大量的行规。
遵循CANoper协议开发出的设备能实现不同生产厂家的产品间的互操作。
要掌握CANoper协议,重点是对对象字典和设备模型的理解以及对4类通信对象的掌握。
本文先对CANoper协议进行削析,再重点介绍在PIC18F458 单片机上开发基于CANoper协议的节点,最后通过温度测控系统实验验证了系统信息传递的可靠性、准确性和实时性。
1CANope n通信协议简介CANopen协议是CiA协会基于CAN总线定义的应用层协议之一,在各种控制系统中得到了广泛应用。
它以CAN芯片为硬件基础,有效利用CAN芯片所提供的简单通信功能来满足工业控制网络的复杂应用层协议要求。
CANoper网络是主从站(Master —Slave)结构,系统的运行由主站控制,主站可以对127个从设备进行控制,不同设备通过CAN总线进行连接组网。
图1为CANoper设备模型。
CANoperffi信协议接口用于提供在总线上收发通信对象的服务,不同CANoper设备间的通信都是通过交换通信对象来完成的。
CANoper协议中定义了4种通信对象(通信模式),用于对不同作用的信息进行处理:NMT寸象(网络管理对象)、SDO寸象(服务数据对象)、PDO寸象(过程数据对象)、特殊功能对象。
qt开发上位机_上位机开发之单片机通信实践(一)

qt开发上位机_上位机开发之单⽚机通信实践(⼀)经常会有⼀些学员会问到上位机与单⽚机之间通信的问题,⽽我们经常会讲上位机与PLC之间通信,那么其实对上位机开发来说,不管是和PLC通信,还是和单⽚机通信,通信原理都是⼀样的。
PLC的本质就是单⽚机,在单⽚机的基础上添加⼀些外围电路并形成产品化,即构成了PLC控制器。
今天在这⾥给⼤家分享⼀个上位机与单⽚机通信的实例,希望对⼤家开发上位机有所启发。
1. 单⽚机硬件介绍只要做上位机开发,就离不开通信协议。
⼀般来说,单⽚机可以与上位机之间以串⼝通信为主,当然也不排除现在有的单⽚机也集成了以太⽹⼝。
就串⼝通信⽽⾔,常⽤的⼏种通信⽅式,包括串⼝⾃定义协议、Modbus协议、CAN总线,接下来介绍的这个单⽚机是某个锂电池的核⼼板,它主要是⽀持Modbus协议和CAN总线的⽅式。
图表 1单⽚机硬件2. 通信测试(1)这⾥我们选择的是基于485总线的ModbusRTU通信协议,如果要实现上位机开发,需要单⽚机开发⼈员提供⼀份通信变量表,如果读取变量较多或者不连续,需要进⾏分组读取。
(2)通信变量表⼀般包含参数名称、Modbus地址、存储区、数据类型、换算公式等内容,能够将通信变量表看明⽩并完成通信测试,是能够完成上位机开发的前提。
(3)这⾥,我截取部分变量表跟⼤家做⼀个分析:图表 2 Modbus寄存器表上表中,以电芯总电压为例,Modbus地址为0x1003,对应⼗进制即为4099,寄存器地址即为44100,读取类型为ushort类型,换算公式为读取之后乘以0.01,⽐如读取值为5630,即为5.63V。
分析明⽩之后,我们就可以先⽤ModbusPoll软件来⼀波初步测试,如果需要Modbus软件资料的,可以关注⼀下喜科堂官⽅关注:dotNet ⼯控上位机,然后像聊天⼀样发送关键词:Modbus软件套装即可。
这⾥我们需要通过485转USB连接到电脑中,然后通过设备管理器,看到端⼝号为COM4。
单片机中通信协议的定义与解析
单片机中的通信协议是指在单片机之间进行数据传输时所遵循的规则和标准。
它规定了数据传输的格式、传输的方式、传输的速率、数据的校验方式等,以确保数据传输的准确性和可靠性。
下面将对通信协议的定义和解析进行介绍。
定义:通信协议是单片机之间进行数据传输时所遵循的规则和标准,它规定了数据传输的格式、传输的方式、传输的速率、数据的校验方式等。
通信协议通常包括物理层、数据链路层、网络层、传输层和应用层等层次。
解析:1. 物理层:物理层是通信协议的最底层,它规定了数据传输的硬件接口和传输介质,如串口、USB、以太网等。
物理层规定了信号的电平、传输速率、信号的编码方式等,以确保数据能够正确地传输。
2. 数据链路层:数据链路层负责将物理层传输的数据进行打包和拆包,并处理错误检测和流量控制等问题。
它通常使用MAC地址来标识设备,并通过帧的方式来传输数据。
3. 网络层:网络层负责将不同的网络连接起来,并处理路由、寻址和数据包转发等问题。
它通常使用IP地址来标识设备,并通过IP数据包的方式来传输数据。
4. 传输层:传输层负责建立、维护和拆除传输连接,并处理数据传输的可靠性问题。
它通常使用TCP或UDP协议来传输数据,并通过数据流或报文的方式来传输数据。
5. 应用层:应用层是通信协议的最上层,它负责处理具体的业务逻辑和数据交换问题。
它通常使用特定的协议来传输数据,如MQTT、HTTP、蓝牙等。
在单片机之间的通信中,常用的通信协议有串口通信协议、USB通信协议、网络通信协议等。
其中,串口通信协议是最常用的通信协议之一,它通过串行通信的方式将数据从一个单片机传输到另一个单片机。
USB通信协议则是一种高速、可靠的数据传输方式,通常用于需要大量数据的场景。
而网络通信协议则可用于将单片机连接到互联网,实现远程控制和数据交换。
总之,通信协议是单片机之间进行数据传输时所遵循的规则和标准,它规定了数据传输的格式、传输的方式、传输的速率、数据的校验方式等,以确保数据传输的准确性和可靠性。
单片机远程监测系统的通信协议与远程控制
单片机远程监测系统的通信协议与远程控制一、引言单片机远程监测系统是一种通过网络实现数据传输和远程控制的智能监测系统。
为了实现系统的正常运行和实时监测,需要设计合适的通信协议和远程控制方式。
本文将探讨单片机远程监测系统的通信协议和远程控制的相关技术。
二、通信协议1. 串口通信在单片机系统中,常用的通信方式之一是串口通信。
通过串口通信,单片机可以与上位机或其他外部设备进行数据交换。
通常采用的是RS232或RS485协议。
RS232协议使用一对数字信号线进行数据交换,速度较慢但传输距离较短。
RS485协议支持多个设备同时进行数据交换,传输速度较快且传输距离较长。
2. 网络通信随着互联网的发展,使用网络通信成为一种常见的方式。
通过以太网或Wi-Fi等方式,可以实现单片机与外部设备之间的远程数据传输。
常见的网络通信协议有TCP/IP、UDP和HTTP等。
TCP/IP协议可保证数据传输的可靠性,适用于需要确保数据完整性的应用场景。
UDP协议传输速度快,但不保证数据的可靠性,适用于实时性要求较高的应用场景。
HTTP协议主要用于数据的展示和交互,适用于Web应用。
3. 无线通信在一些场景下,使用无线通信更为方便。
常见的无线通信技术包括蓝牙、ZigBee和LoRa等。
蓝牙通信适用于近距离通信,适合小范围内的数据传输和远程控制。
ZigBee是一种低功耗、低速率、近距离的无线通信技术,适用于对功耗要求较高的应用场景。
LoRa技术采用长距离、低功耗的无线通信方式,适用于远程通信场景。
三、远程控制1. 基于手机APP的远程控制当前,手机成为人们不可或缺的工具之一。
通过开发相应的手机APP,可以实现对远程监测系统的控制。
用户可以通过手机APP对单片机进行指令发送和参数设置,实现对监测节点的远程控制。
通过手机APP,用户可以随时随地对监测系统进行实时监测和控制。
2. 基于Web页面的远程控制利用现代化的Web技术,可以通过浏览器实现对远程监测系统的控制。
单片机与上位机通信协议的制定解析
单片机与上位机通信协议的制定单片机和上位机的串口通信协议分为上行协议和下行协议,要分别制定!上行协议,即由单片机向上位机发送数据。
下行协议,即由上位机向单片机发送数据。
而通信协议又要分固定长度和不定长度两种本文所介绍的协议属于简单的固定字长的通信协议!下行协议由四个字节构成上表是简单的上位机对单片机的控制指令下述函数是C艸封装的串口通信类中的发送函数的封装public void SerSe ndCommu(byte orderDef, byte data)// 参数1为命令字,参数二为要发送的数//据,需要时可直接调用Byte[] BSe ndTemp = new Byte[SEND_LENTH];BSe ndTemp[O] = PRE;BSe ndTemp[1] = orderDef;BSe ndTemp[2] = data;BSe ndTemp[3] = END; this.serialPort1.Write(BSendTemp, 0, SEND_LENTH);}下位机中用中断方式接收字符,本文用的是GCC语言,下面是串口接收数据中断ISR(USART_RXC_vect) 〃串口接收中断{un sig ned char status,data;status = UCSRA; //** 首先读取UCSRA勺值,再读取UDR fi,顺序不能颠倒,否则读取UDR后的UCSRA勺//值即会改变**data = UDR;if(!Uart_RecvFlag)〃判断缓存中的数据是否读完,读完则接收指令{if((status&( (1<<FE)|(1<<PE)|(1<<DOR)))==0){rx_buffer[rx_cou nter]=data;rx_co un ter++;switch(rx_cou nter){case 1:if(data!=USART_BEGIN_STX)rx_co un ter=0;break;case 4:rx_co un ter=0;if(data==USART_END_STX)Uart_RecvFlag=1;break;}}}在单片机主循环程序的最前部分进行指令译码if(Uart_RecvFlag)〃接收到命令{ _switch(rx_buffer[1]){ _case OxAA://单片机状态命令控制;ucWorkStatue=rx_buffer[2];〃指令数据break;case OxDD://PWM值修改指令OCR2=rx_buffer[2];break;case 0xFF://初始温度设定break;} Uart_RecvFlag=0;} _//随后进行执行指令switch(ucWorkStatue) {case 1:// 空闲模式break;case 2://测量模式,但不输出break;case 3://测量模式,由串口输出break; case 4://PWM输出测试break;default:break;}这样就可以利用串口对单片机进行在线命令控制了;上行协议的制定!和下行协议基本一致!在AVR单片机程序中定义了串口通信输出缓冲区,缓冲区的字长正好为协议的长//串口发送缓冲区变量声明volatile un sig ned char tx_buffer[TX_BUFFER_SIZE];〃定义串口发送缓冲区volatile unsigned char tx_wr_index=0,tx_rd_index=0,tx_counter=0;//rx_wr_index 针,rx_rd」ndex 读指针,rx_counter 缓冲区数据个数写指//USART发送函数void USART_Transmit(unsigned char data)// 发送数据函数{while(tx_counter==TX_BUFFER_SIZE);// 输出缓冲区满,等待asm("cli");if(tx_counter||((UCSRA & DATA_REGISTER_EMPTY)==0)){tx_buffer[tx_wr_index]=data;if(++tx_wr_index==TX_BUFFER_SIZE)tx_wr_index=0;++tx_counter;}elseUDR = data;asm("sei");}// 发送中断服务程序ISR(USART_TXC_vect)//USAR■发送数据中断{if(tx_counter){--tx_counter;UDR=tx_buffer[tx_rd_index]; if(++tx_rd_index==TX_BUFFER_SIZE){tx_rd_index=0;}}}在C#编写的上位机中,利用串口接收事件响应方法定义serialPort1.ReceivedBytesThreshold = RECEIVE_LENTH;在时间响应事件中调用协议分析处理函数serialPortCaculate() 来分析协议private void serialPort1_DataReceived(object sender, SerialDataReceivedEventArgs e){bel_dispzedNum.Invoke(newMethodInvoker(delegateint inNumSData=0; try{inNumSData =this.serialPort1.BytesToRead;b_serial_bufin_diplay.T// 串行数据处理 // 图像显示 byte dataID= 0x00; double temp =this.serialPortCaculate(ref dataID);switch(dataID){case TEMVAL:()break;}// 匿名方法catch { }ext = inNumSData.ToString();break;default:this.serialPort1.DiscardInBuffer}));/////// 接收转换协议, 接收数据时直接调用private double serialPortCaculate(ref byte dataID){Byte[] BReceiveTemp = new Byte[RECEIVE_LENTH];for (int i = 0; i < RECEIVE_LENTH; i++)// 接收定长数据字符串{ BReceiveTemp[i] = Convert.ToByte(this.serialPort1.ReadByte());}dataID=BReceiveTemp[1];switch (BReceiveTemp[1]){case TEMVAL: default :}}。
单片机通讯协议
CSerialPort向父类发送的消息号如下:
#define WM_COMM_RXCHAR WM_USER+7 // A character was received and placed in the input buffer.
因此需要手动添加此消息的响应函数:
else
state_machine = 0; // 状态机复位
}
else if(state_machine == 1)
{
if(rcvdat == 0xAA) // 接收到帧头第二个数据
state_machine = 2;
else
state_machine = 5;
else
state_machine = 0;
}
else if(state_machine == 5)
{
lencnt = 0; // 接收数据计数器
rcvcount = rcvdat; // 接收数据长度
state_machine = 0; // 状态机复位
}
else if(state_machine == 2)
{
if(rcvdat == 0x7E) // 接收到帧头第三个数据
state_machine = 3;
else
state_machine = 0; // 状态机复位
通信中的数据往往以数据包的形式进行传送的,我们把这样的一个数据包称作为一帧数据。类似于网络通信中的TCPIP协议一般,比较可靠的通信协议往往包含有以下几个组成部分:帧头、地址信息、数据类型、数据长度、数据块、校验码、帧尾。
帧头和帧尾用于数据包完整性的判别,通常选择一定长度的固定字节组成,要求是在整个数据链中判别数据包的误码率越低越好。减小固定字节数据的匹配机会,也就是说使帧头和帧尾的特征字节在整个数据链中能够匹配的机会最小。通常有两种做法,一、减小特征字节的匹配几率。二、增加特征字节的长度。通常选取第一种方法的情况是整个数据链路中的数据不具有随即性,数据可预测,可以通过人为选择帧头和帧尾的特征字来避开,从而减小特征字节的匹配几率。使用第二种方法的情况更加通用,适合于数据随即的场合。通过增加特征字节的长度减小匹配几率,虽然不能够完全的避免匹配的情况,但可以使匹配几率大大减小,如果碰到匹配的情况也可以由校验码来进行检测,因此这种情况在绝大多说情况下比较可靠。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单片机与上位机通信协议的制定
单片机和上位机的串口通信协议分为上行协议和下行协议,要分别制定!
上行协议,即由单片机向上位机发送数据。
下行协议,即由上位机向单片机发送数据。
而通信协议又要分固定长度和不定长度两种
本文所介绍的协议属于简单的固定字长的通信协议!
下行协议由四个字节构成
上表是简单的上位机对单片机的控制指令
下述函数是C#中封装的串口通信类中的发送函数的封装
public void SerSendCommu(byte orderDef, byte data)//参数1为命令字,参数二为要发送的数
//据,需要时可直接调用
{
Byte[] BSendTemp = new Byte[SEND_LENTH];
BSendTemp[0] = PRE;
BSendTemp[1] = orderDef;
BSendTemp[2] = data;
BSendTemp[3] = END;
this.serialPort1.Write(BSendTemp, 0,
SEND_LENTH);
}
下位机中用中断方式接收字符,本文用的是GCC语言,下面是串口接收数据中断
ISR(USART_RXC_vect)//串口接收中断
{
unsigned char status,data;
status = UCSRA; //**首先读取UCSRA的值,再读取UDR值,顺序不能颠倒,否则读取UDR后的UCSRA的
//值即会改变**
data = UDR;
if(!Uart_RecvFlag)//判断缓存中的数据是否读完,读完则接收指令
{
if((status&((1<<FE)|(1<<PE)|(1<<DOR)))==0)
{
rx_buffer[rx_counter]=data;
rx_counter++;
switch(rx_counter)
{
case 1:
if(data!=USART_BEGIN_STX)
rx_counter=0;
break;
case 4:
rx_counter=0;
if(data==USART_END_STX)
Uart_RecvFlag=1;
break;
}
}
}
}
在单片机主循环程序的最前部分进行指令译码
if(Uart_RecvFlag)//接收到命令
{
switch(rx_buffer[1])
{
case 0xAA://单片机状态命令控制;
ucWorkStatue=rx_buffer[2];//指令数据
break;
case 0xDD://PWM值修改指令
OCR2=rx_buffer[2];
break;
case 0xFF://初始温度设定
break;
}
Uart_RecvFlag=0;
}
//随后进行执行指令
switch(ucWorkStatue)
{
case 1://空闲模式
break;
case 2://测量模式,但不输出
break;
case 3://测量模式,由串口输出
break;
case 4://PWM输出测试
break;
default:
break;
}
这样就可以利用串口对单片机进行在线命令控制了;
上行协议的制定!
和下行协议基本一致!
在AVR单片机程序中定义了串口通信输出缓冲区,缓冲区的字长正好为协议的长度;
//串口发送缓冲区变量声明
volatile unsigned char tx_buffer[TX_BUFFER_SIZE];//定义串口发送缓冲区
volatile unsigned char
tx_wr_index=0,tx_rd_index=0,tx_counter=0;//rx_wr_index写指
针,rx_rd_index读指针,rx_counter缓冲区数据个数
//USART发送函数
void USART_Transmit(unsigned char data)//发送数据函数
{
while(tx_counter==TX_BUFFER_SIZE);//输出缓冲区满,等待
asm("cli");
if(tx_counter||((UCSRA & DATA_REGISTER_EMPTY)==0))
{
tx_buffer[tx_wr_index]=data;
if(++tx_wr_index==TX_BUFFER_SIZE)
tx_wr_index=0;
++tx_counter;
}
else
UDR = data;
asm("sei");
}
//发送中断服务程序
ISR(USART_TXC_vect)//USART发送数据中断
{
if(tx_counter)
{
--tx_counter;
UDR=tx_buffer[tx_rd_index];
if(++tx_rd_index==TX_BUFFER_SIZE)
{
tx_rd_index=0;
}
}
}
在C#编写的上位机中,利用串口接收事件响应方法定义
serialPort1.ReceivedBytesThreshold = RECEIVE_LENTH;
在时间响应事件中调用协议分析处理函数serialPortCaculate()来分析协议
private void serialPort1_DataReceived(object sender, SerialDataReceivedEventArgs e)
{
bel_dispzedNum.Invoke(new MethodInvoker(delegate
{
//匿名方法
int inNumSData=0;
try
{
inNumSData =
this.serialPort1.BytesToRead;
b_serial_bufin_diplay.T ext = inNumSData.ToString();
//串行数据处理
//图像显示
byte dataID = 0x00;
double temp =
this.serialPortCaculate(ref dataID);
switch(dataID)
{
case TEMVAL:
break;
default:
this. serialPort1.DiscardInBuffer
()
break;
}
}
catch
{ }
}));
}
///////接收转换协议,接收数据时直接调用
private double serialPortCaculate(ref byte dataID)
{
Byte[] BReceiveTemp = new Byte[RECEIVE_LENTH];
for (int i = 0; i < RECEIVE_LENTH; i++)//接收定长数据字符串
{
BReceiveTemp[i] =
Convert.ToByte(this.serialPort1.ReadByte());
}
dataID=BReceiveTemp[1];
switch (BReceiveTemp[1])
{
case TEMVAL:
default :
}
}。