机载激光雷达扫描仪RIEGL VQ-480
6-HawkScan低空激光扫描测图系统(V3)

数据处理软件RiPROCESS 坐标转换软件RiWORLD
扫描鹰HawkScan系列低空激光扫描测图系统 —— 系统工作流程
数据采集
激光原始数据 机上GNSS数据 地面基站数据
机上IMU数据
原始数码影像
后差分处理
激光航迹数据 激光点云大地定向
超高密度点云数据获取(可满足1:500规范要求) 同时获取带有位置、姿态信息的影像数据 根据航线设计定点进行激光开启、关闭及相机曝光
扫描鹰HawkScan系列低空激光扫描测图系统 —— HawkScan-1600
HS-1600 — 满足更远测距的需要
激光扫描单元
最大脉冲发射频率
820 kHz
多目标探测能力 接收无穷次回波
高性能的保证 — RIEGL Scanner Inside ——业界领先的核心技术
RIEGL激光扫描仪 —— 业界领先的核心技术
• 激光光植束被可穿剔透除植及被D,EM到达的真建实立地
表,这一过程中会产生多次回波。
平行线扫描机制 均匀的点云分布
• 由建地DE表M返所回需的的回真M波实T信地A号区形中信域包息自含。动着解构算 兼顾测程和点密度
RIEGL激光扫描仪 —— 业界领先• 的在核利用心脉技冲飞术行时间的原理进行测距
时,存在一个理论上的最大测距范围
平行线扫描机制
• 这一测距范围是由激光脉冲发射频率
和光速共同决定的MTA区域自动解算
均匀的点云分布
兼顾测程和点密度
• RIEGL对发出的脉冲序列进行精细编码 使得VUX-1可以对不同时间发出的脉冲 进行精确的识别,从而在不损失发射频 率的前提下进行更大范围的测距
数字三维建模激光扫描仪RIEGL VZ-400参数

VZ-400 具有轻便、坚固耐用等显著优点,其安装和操 作也极其简单:通过自带的控制面板即可设置参数,控制 扫描,无需携带笔记本电脑,并可使用 iPhone 或 PDA 进行 远距离的遥控操作,将全部数据都储存在设备附带的存储
卡中。 设备本身具备内部数据存储能力
显示屏,防刮防反射并配备多语言菜单。 防水抗污键盘,按钮设计便于控制。 通过扩音器可获取声音信号。
建筑和正射影像测量 建立考古和文化遗产档案 隧道测量 土木工程应用及工程监测 城市三维建模 数字城市建模和车载激光扫描成像系统
Terrestrial Laser Scanning
一级安全激光制造依照IEC60825-1:2007
The following clause applies for instruments delivered into the United States: Complies with 21 CFR 1040.10 and 1040.11 except for deviations pursuant to Laser Notice No. 50, dated July 26, 2001.
扫描数据存储
内置 32 G 闪存存储 外部有 USB 2.0 存储驱动接口(可接 U 盘 /
移动硬盘)
WLAN 天线
搬运手柄
高分辨率TFT彩色液晶显示屏
控制面板
电源接口,LAN数据接口10/100 MBit/s,电源开关
GPS 天线接口
数码相机安装接口 数码码相机 USB 接口 GPS 天线接口 WLAN 天线接口 USB 2.0接口,用于插入其 他的外部存储器 LAN接口,10/100/1000 MBit/s,用于快速下载扫描 数据
机载激光雷达参数

机载激光雷达参数
机载激光雷达(Airborne LiDAR)是一种高精度三维数据采集设备,可以用于地形测量、地表覆盖分类、建筑物地物提取等多个领域。
下面将对机载激光雷达的主要参数进行详细介绍。
1. 激光发射参数
(1)激光波长:机载激光雷达一般采用近红外波段,波长在800-1064nm之间。
(2)激光脉冲频率:指激光束发出的脉冲数,一般在1-50kHz之间。
2. 接收器参数
(1)接收器视场角:指接收器能够接受的激光束角度范围,通常在30-60度之间。
(2)接收器灵敏度:指接收器的信号增益,一般以电子伏特(V)表示。
(3)接收器噪声:指接收器在没有信号时的最小输出值,正常情况下要小于1个光子。
3. 扫描参数
(1)扫描方式:机载激光雷达主要有两种扫描方式,一种是机械扫描,另一种是固态扫描。
机械扫描一般采用旋转镜头的方式改变激光束的方向,而固态扫描利用微镜片或者转换器件快速切换激光束方向。
(2)扫描速度:机载激光雷达的扫描速度通常在10-50Hz之间。
4. 定位参数
(1)定位系统类型:机载激光雷达的定位系统通常采用GPS、IMU等。
(2)定位精度:指机载激光雷达采集的数据对应的位置精度,通常在10cm以内。
5. 数据处理参数
(1)数据格式:机载激光雷达数据格式通常为LAS或ASCII格式。
(2)能量密度:指激光雷达扫描的数据点密度,一般在1-30点/m2之间。
(3)分辨率:指数据采集的最小细节尺寸,一般在10-50cm之间。
RIEGL三维激光扫描仪

RIEGL VZ-400产品
将扫描仪、软件和数码相机结合,能够实现:
●自动生成高分辨率的贴 图纹理网格 ●自动生成三维正射影像、 数字高程图和等高曲线图 ●实时定位、距离、面积 和体积的测量
● 实时设置任何虚拟 的视场点 ●实现像照片一样真实 的三维模型建立 ● 精确识别目标细节
RIEGL VZ-400产品
RIEGL LMS-Z620产品
LMS-Z620 是Riegl公司在 2008年推出的超长测距、高 精度的三维激光扫描成像仪。 该系统仍然采用对人眼和动 物眼睛绝对安全的一级激光 器,激光测距高达2000米, 尤其适用于繁忙的水利、电 力、铁路、公路工程,矿山 开发,滑坡监测等。
应用案例
◆ Riegl VZ400激光扫描仪在65m天线背架检测中的应 用 ◆ Riegl Z420i 三维激光扫描仪在锦屏水电站引水洞开 挖检验中的应用 ◆露天矿山激光扫描应用:用于矿山的土方计算以及结构特 点,剔除植物的三维表面模型,和现场的基础设施的快速创 建。 ◆激光扫描仪在远距离非接触测距上的应用 ◆ 3D激光扫描于公路上的应用
rieglvz400产品自动生成高分辨率的贴图纹理网格自动生成三维正射影像数字高程图和等高曲线图实时定位距离面积和体积的测量实时设置任何虚拟的视场点实现像照片一样真实的三维模型建立精确识别目标细节建筑和正射影像测量数字城市建模和车载激光扫描成像系统rieglvz400产品riegllpm321产品riegllpm321是目前市场上射程最远的高精度三维激光扫描测量系统
图库 >
应用案例
LMS-Z420i LPM-321 LMS-Z420i 深洞扫描 三维激光扫描仪用于地籍测量 高速公路事故调查 RIEGL VZ-1000在高密度植 被山区的地形图测量
机载激光雷达技术介绍-Q1560

• ALS70脉冲分辨率3.5米 • Orion H300脉冲分辨率0.7米 • Q780全波形采集
RIEGL LMS-Q780全波形采集技术
first return (highest target)
samples of echo
true ground (lowest target)
2.2 m
RIEGL LMS-Q780采集效率
1m
1m
edge of swathRIEGL LMS-Q780多脉冲技术
为增加点云采集密度,激光器多采用多脉冲采集模式。 因脉冲处理能力限制,厂商标称最大激光频率一般受地形高差限制较大。 脉冲频率越高,测距采集范围越窄,相应地形高差要求较小。
RIEGL LMS-Q780全波形采集技术
??
DEM
Riegl LMS-Q1560
最新型设备—RIEGL Q1560
Riegl LMS-Q1560
RIEGL Q1560独有双向扫描方式
rotating polygon single channel
RIEGL LMS-Q780
rotating polygon dual channel
RIEGL LMS-Q1560
最高可达400kHZ 近红外 无限多个
扫描机制原理 扫描模式 扫描视场角
旋转反射棱镜 平行线扫描
60°
指标 扫描频率 角度分辨率
同步扫描
测量强度 POS系统 操作中 最大飞行高度 温度范围
电源 电流消耗
参数
120Hz 0.001º 同步扫描 外部时间信号 16bit POSAV610
海拔5000m
-10℃—50℃ 18—32VDC Approx.5 A@24 VDC
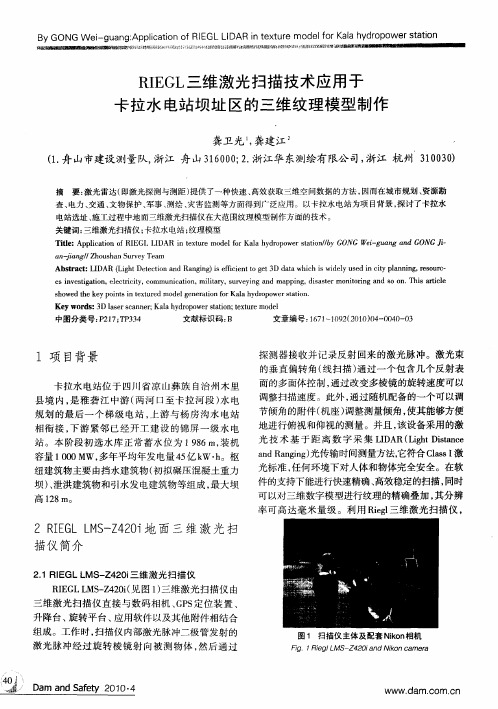
RIEGL三维激光扫描技术应用于卡拉水电站坝址区的三维纹理模型制作
(. 1 舟山市建设测量 队, 浙江 舟 山 36 0 ;. 1 0 0 2浙江华 东测绘有 限公 司, 浙江 杭 州 3 0 3) 1 00
摘 要: 激光雷达( 即激光探测与测距 ) 提供 了一种快速 、 高效获取 三维空间数据的方法, 因而在城市规划 、 资源勘
查、 电力 、 通 、 交 文物保护 、 军事 、 测绘 、 害监测等方面得到广泛应用 。以卡拉水电站为项 目背景 , 灾 探讨 了卡拉水 电站选址 、 施工过程中地 面三维激光扫描仪在大范围纹理模型制作方面的技术。 关键词 : 三维激光扫描仪 ; 卡拉水电站 ; 纹理模 型
探测器接收并记录反射回来的激光脉冲。激光束 的垂 直偏 转 角 ( 扫描 ) 线 通过 一个 包 含几 个 反射 表 面的多 面体控 制 , 过 改变多 棱镜 的旋转 速度, 过随 机配备 的一个 可 以调 通
相衔接 , 下游 紧邻 已经 开 工 建设 的 锦屏 一 级 水 电
Til:Ap l aino EGL L D te pi t fRI c o I AR e tr d lfrKaah do o e tt n/yGO ig a ga d G NG J— i txuemo e o l y rp w rsai / NG We- u n n O i n o b
躺 煳 鞫 翻 龋 融 黼 鳞 》 嚣 》辩 § 饕糕 萋 颤鞭城 {懒 g § 棼 , 蛙 #瓣搿 瓣 § 《 《 麓§ 辩 @#} § § 鲢 萏 翻嘲 鼎翻嘲 ——■■— 一
R E L三维 激 光扫 描 技术 应 用 于 IG 卡 拉水 电站 坝址 区 的三维 纹理 模 型 制作
s we h yp i t nt xu e d e e a in frKaa h d o we t to . ho dt eke o n si e t r d mo el n r to o l y r po rsai n g
RIEGL LMS-Q780中文介绍
北京市丰台区芳城园一区17号楼日月天地B-2207
Tel: 010-58076899 Fax: 010-58076178
Http:
Email: contactfs3s@
为了应对工业和测绘领域对激光测距仪的 挑战,RIEGL 集其在激光测距仪上数十年 的设计、制造专业知识和经验,采用最前 沿的模拟和数字化电子元件设计了LMS-Q780,该扫描仪可以 记录相当大距离内回波的完整信息。
RIEGL多时相(MTA)数据获取和处理
一个扫描带包含3 个 数据 黄色 蓝色 紫色
全波形、高海拔测量机载激光雷达扫描仪
在2000米高空,激光测量频率也高 达266,000点/秒 多时相(MTA)功能最高可同时有8 个测量波 全波形数字化,可接收无穷次回波 激光发射频率高达40万赫兹
测距精度可达20mm 测速可达200线/秒
扫描视场角 适合冰川和雪地测量 具备GNSS接口,便于组装 与RIEGL其他机载设备和软件无缝衔接
数据获取和处理
RIEGL LMS-Q780 回波数字化
ACQUISITION 图表的第一个线图表示模 拟的信号:第一个(红色)脉冲表示激光 器发射出去的激光脉冲,三个蓝色的脉 冲表示打到树木不同位置而得到的回波 信号;最后一个脉冲表示打到地面而得 到的回波信号。
模拟回波信号以固定的时间间隔抽样(中 间的线图表示)。通过将模拟回波信号转 换为数字信号, 就得到了数字化数据流 (最下面的线图表示)。 数据流存储在 RIEGL数据记录器中,随后用于离线后处 理,如POST PROCESSING图表所示。
第一种情况:激光脉冲首先依次打 到树冠的不同位置从而得到三个独 立的、连续的回波信号,而后一小 部分激光脉冲打到地面得到另一个 回波信号;第二种情况:激光脉冲 以小角度打到光滑的地表,得到一个波长略宽于激光脉冲的回波 信号;第三种情况:激光脉冲垂直打到平坦地表,并反射一个波 形近似于激光脉冲的回波。
三维激光扫描技术及其应用
原理 —— 结构光
原理
物体点的三维坐标 (X,Y,Z) ,是经过像点(X’,Y’)与相机光心的直线与光 平面的交点。
地面三维激光测量技术
定位原理
地面三维激光测量技术
测距原理
脉冲式测距
相位式测距
地面三维激光测量技术
按测距类型分类
脉 冲 式 扫 描 仪
相 位 式 扫 描 仪
三维激光扫描仪原理
采用扫描仪逐面测量法
地面三维激光测量技术
与传统测量方式比较
地面三维激光测量技术
技术优势 使用简单,快速扫描,安全操作,应用范围广泛 数据非常详细,高质量图像并可观察图片的数据特征 附加的一些测量信息,如激光强度、色彩等,这是传统测量不可能做到的 精确高速的数据捕获、减少数据采集和分析的回转次数 对扫描区域进行的长程、高速扫描,可使效率最大化 一次扫描后可以在点云模型上进行反复的“模型测绘”
三维激光扫描技术及其应用
2018年3月
内容概要
1 地面三维激光扫描技术 2 车载移动测量系统 3 工程应用
内容概要
1 地面三维激光扫描技术 2 车载移动测量系统 3 工程应用
简介——三维激光扫描技术的概念
三维激光扫描仪
通过发射激光来扫描获取被测物体表面三维坐标和反射光强度的仪器。
三维激光扫描技术
多学科融合
三维激光扫描技术涉及现代电子、光学、机械、控制工程、图像处 理、计算机视觉、计算机图形学、软件工程等技术,是多种先进技术 的集成。
简介——三维激光扫描仪分类
三维激光扫描技术发展概况
逆向工程
三维激光扫描技术发展概况
医学
三维激光扫描技术发展概况
影视动漫
地面激光扫描的发展
机载激光雷达选择参考
机载激光雷达选择参考目前市场上销售的机载激光雷达来自多个厂家,有多种品牌和种类。
那么,如何从中选择技术先进、性价比好、故障少又售后服务完善的设备呢?一、机载激光雷达系统生产厂家介绍目前提供机载激光雷达设备的厂家主要有:徕卡、Optech(加拿大)、IGI、天宝、TopEye和Riegl。
这些厂家的特点是什么呢?(a)自己生产机载激光扫描仪,然后购买其他厂家的GPS/IMU及硬件和软件,集成机载激光雷达。
这类厂家有徕卡,Optech(加拿大),Topeye(瑞典)和Riegl(奥地利)。
在这些生产激光扫描仪的厂家中,生产规模最大的和研究能力最强的是Riegl公司,他向许多厂家提供了一系列产品,如:LMS-Q系列机载激光扫描仪:LMS-Q240, LMS-Q280, LMS-Q120i,LMS-Q160(超轻型,防摔型,无人机专用)等。
新型的具备数字化全波形数据获取和实时处理能力的VQ系列机载激光扫描仪:VQ180, VQ280, VQ480,LMS-Q560和VQ680i等。
目前,徕卡只生产一种激光扫描仪,而其他厂家也大多只生产两款机载激光扫描仪作为自己的系统集成使用。
Optech虽然能够生产具备数字化全波形数据的激光扫描仪,但不是标准配置,用户需要另外付费。
但即便如此,也已经落后Riegl公司六年。
这里还要指出的是:徕卡公司在2005年前一直使用的是加拿大Applanix POS系统,由于美国的禁运政策,向中国出口的POS系统都进行了许多修改,性能明显下降,并且伴随不稳定的情况。
为了保证激光雷达性能的可靠性,徕卡在2004年后测试了许多不同公司(包括Honeywell)的POS系统。
在2005年7月又从加拿大TerraMatics公司(1998年成立)购买了其POS系统的IP(知识产权),避开北美区域,由自己(在瑞士)来研发和委托生产型号为iPAS 的POS系统。
目前国内所销售的徕卡的ALS50-ii和60系统基本都是配置iPAS定位系统。
民族文化遗产数字化保护技术概述
民族文化遗产数字化保护技术概述摘要:当今时代计算机的迅速发展和图形图像处理技术及虚拟现实技术的不断提高为民族文化遗产的数字化保护奠定了坚实的基础。
该文介绍目前数字化处理的关键技术,如三维激光扫描数字建模技术、点云数据的处理、三维彩色模型实现方法等以及数字化民族文化遗产对民族文化遗产的保护有着十分重要的作用。
同时,通过对比、研究国内外数字化文化遗产的相关情况,说明将民族文化遗产数字化是一种必然趋势。
关键词:民族文化遗产;三维激光扫描系统;点云数据处理;三维彩色模型;数字化中图分类号:tp393 文献标识码:a 文章编号:1009-3044(2013)15-3643-03民族文化遗产是一个民族的政治、经济、文化的象征。
通过对民族文化遗产的研究,我们可以回顾民族过去的历史,为继承民族的文化打下坚实的基础。
然而,民族文化遗产在传承的过程中,不免会遭遇失传、破坏的伤害。
这对一个民族来说是非常大的损失与遗憾。
如今,随着计算机的迅速发展和图形图像处理技术的不断提高,民族文化遗产的保护也逐渐走向数字化和网络化。
本文将结合一些相关领域的典型实例资料和国内外发展现状和趋势,综合介绍民族文化遗产保护数字化的主要研究内容及其关键技术,这些关键技术使民族文化遗产永久保存下来成为现实,以此来说明将民族文化遗产数字化是发展的必然趋势。
1 国内外相关领域典型实例及发展趋势1.1 国外发展1993年,欧盟国家制定的《欧洲联盟条约》为文化遗产保护奠定了坚实的法律基础。
此后,欧盟先后制定了“culture 2000 programme”、“cluture programme(2007-2013)”等计划,推动了欧盟文化遗产保护的脚步。
近年来,欧盟重奖优秀文化遗产保护项目。
组委会提出对于杰出文化的遗产除了保护还应该加强其新用途的开发。
可以包括的品类有,独体的建筑或建筑群,无论在城市和乡村都可以;工业以及工程的遗址;文化景观,历史悠久的公园、花园景观设计,面积较大的设计景观、文化场所、环境广告或农业奇观;考古遗址,包括水下遗址;艺术品,有历史意义和收藏价值的古物。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Preliminary System Configuration 10/08
Scanner Basic Configuration
Part-No. 21R09-00-106-00
Airborne Laser Scanner RIEGL VQ-480 Part-No. 21R09-00-006-00
• Laser transmitter & receiver front end
• Motorized mirror scanning mechanism, FOV 60° • Signal processing electronics with
echo digitization and online waveform analysis • Internal power supply electronics, input voltage 18 – 32 V DC
Detailed specifications and laser classification according to the latest datasheet RIEGL VQ-480.
Electrical Interfaces, integrated
• TCP/IP Ethernet Interface, providing smooth integration of the RIEGL VQ-480 data
into a 10/100/1000 MBit/sec, twisted-pair (TP) Local Area Network (LAN). The scanner acts as a server allowing remote configuration and data acquisition via a platform-independent TCP/IP Ethernet Interface.
Serial RS232, 19• .2 kBd, for data string with GPS time information for • TTL input for 1 PPS Sync Pulse synchronization
Mechanical Interfaces, integrated
• 2 mounting brackets with 6 x M6 thread inserts for mounting of the laser s 3 x M6 thread inserts in the bottom plate, rigidly couple canner • d with the internal
nting of the IMU sensor 6 thread inserts on top mechanical structure for mou • 3 x M Cables
Part-No. 02Z03-02-003-00 TCP/IP Cable M12-M12, 3 m •• Part-No. 02Z03-01-001-00 TCP/IP Cable M12-RJ45, 0.3 m
• Part-No. 02Z03-01-002-00 TCP/IP Cable M12-RJ45 cross over, 0.3 m
Part-No. 02Z03-02-032-00 Serial Data and PPS Cable to GPS receiver, 5 m •
Part-No. 02Z03-02-033-00 Power Supply Cable, 2 pole, 5 m
•
Preliminary System Configuration 10/08
RiVLib – Scandata Interface Library Part-No. 02Z06-02-036-00
Library enabling smooth integration of RIEGL's V-Line Laser Scanners into user applications. The library allows 2D real-time data interfacing and includes tools to create and to query 2D databases containing measurement data and meta information. The library is available in shared library format for Linux (x86) and Windows operating systems.
1 license included.
Software Maintenance for 12 months Part-No. 02Z06-06-013-00
● Free software updates
● E-mail and telephone support
Firmware Maintenance for 12 months Part-No. 02Z06-05-029-00
● Free software updates
User Manual (in English language)
"Technical Documentation & User Instructions"
including, among other things, instructions for: Safety, Installation, Operation, etc.
Carrying Case
Heavy-Duty Carrying Case Part-No. 02Z05-01-027-00
with 4 hinged handgrips and wheels, splash-proof, foam lined to fit shape of RIEGL VQ-480, cables etc., dimensions 560 x 455 x 265 mm.。