基于等效静态载荷法的高速轻载机器人的结构动态优化设计_黄宇涵
航天器超静平台作动器发展及其关键技术综述

第 39 卷第 1 期航 天 器 环 境 工 程Vol. 39, No. 1 2022 年 2 月SPACECRAFT ENVIRONMENT ENGINEERING1 E-mail: ***************Tel: (010)68116407, 68116408, 68116544航天器超静平台作动器发展及其关键技术综述叶田园1,2,庞贺伟3,周元子4*,宗 红4,刘守文1,2(1. 北京卫星环境工程研究所; 2. 航天机电产品环境可靠性试验技术北京市重点实验室;3. 中国空间技术研究院;4. 北京控制工程研究所:北京 100094)摘要:星载有效载荷的灵敏度和有关性能指标的提高对航天器控制系统的精度和稳定度提出越来越高的要求。
具有隔振、抑振及精确指向功能的航天器超静平台得到广泛关注。
超静平台作动器作为实现平台功能的核心执行部件,其质量优劣决定了平台的性能、可靠性和使用寿命。
文章综述国内外不同种类超静平台作动器的性能特点、应用背景及技术发展概况,归纳总结高效率音圈电机技术、长寿命挠性元件技术、地面试验验证技术等关键技术;最后针对未来高精度星载光学载荷的应用需求,探讨了我国在超静平台作动器方面可进一步开展的研究内容。
关键词:超静平台;作动器;挠性元件;隔振;综述中图分类号:V414.5; V416.6文献标志码:A文章编号:1673-1379(2022)01-0001-10 DOI: 10.12126/see.2022.01.001Overview of the development and key technologies of actuator forspacecraft ultra-quiet platformYE Tianyuan1,2, PANG Hewei3, ZHOU Yuanzi4*, ZONG Hong4, LIU Shouwen1,2(1. Beijing Institute of Spacecraft Environment Engineering; 2. Beijing Key Laboratory of Environmental & Reliability TestTechnology for Aerospace Mechanical & Electrical Products; 3. China Academy of Space Technology;4. Beijing Institute of Control Engineering: Beijing 100094, China)Abstract: The improvement of the sensibility and other related performance indicators of satellite-borne payloads calls for higher precision and stability of the spacecraft control system, and the spacecraft ultra-quiet platform with vibration isolation/depression and precise pointing functions has widespread attention. As the key executive component to realize the functions of the ultra-quiet platform, the actuator plays a decisive role for the task reliability and the lifetime of the platform. In this paper, the actuators of ultra-quiet platform are classified, and discussed according to their performance characteristics, the task background, and the technical development. In addition, the key technologies with respect to the high-efficiency voice coil motor, the long-life flexible element, and the ground test verification are reviewed. Finally, in view of the application requirements of high-precision spaceborne optical payloads in the future, some suggestions are made on the research projects worth to be further carried out in the field of the ultra-quiet platform actuator.Keywords: ultra-quiet platform; actuator; flexible element; vibration isolation; review收稿日期:2021-07-29;修回日期:2022-02-25引用格式:叶田园, 庞贺伟, 周元子, 等. 航天器超静平台作动器发展及其关键技术综述[J]. 航天器环境工程, 2022, 39(1): 1-10YE T Y, PANG H W, ZHOU Y Z, et al. Overview of the development and key technologies of actuator for spacecraft ultra-quiet platform[J]. Spacecraft Environment Engineering, 2022, 39(1): 1-100 引言当前天基天文观测、高分辨率对地观测等航天任务对航天器的控制精度提出了极高的要求。
超轻型大载荷无人机的设计与实现

DOI:10.16660/ki.1674-098X.2017.32.012超轻型大载荷无人机的设计与实现①黄嘉豪 陈子杰 黄科超(北京理工大学珠海学院航空学院飞行器制造系 广东珠海 190005)摘 要:本文以超轻型载重无人机作为研究重点。
分析行业研究文献与固定翼无人机行业,对固定翼无人机的结构展开多角度探讨,包括无人机材料、受力、装配方式等方面。
以“减轻每一克重量”为核心思想,使用高弹性轻质工程木质为主体材料,提出高韧性碳纤维复合材料和凯夫拉原丝复合材料进行缠扰补强的方案,设计一款翼展达3.1m,机身1.8m长,整机重量仅970g,电机拉力峰值达4.3kg,载荷比达到5以上的固定翼无人机。
该飞行器采用了S1223高升力翼型为飞机提供足够的升力。
经测试,该固定翼无人机飞行效率好、性价比高,给未来固定翼大载荷的无人机设计带来一个新方向。
关键词:无人机 超轻型 大载荷 碳纤维复合材料 凯夫拉复合材料中图分类号:V279 文献标识码:A 文章编号:1674-098X(2017)11(b)-0012-02①作者简介:黄嘉豪(1996—),男,广东梅州人,汉族,本科在读,研究方向:飞行器制造机械、飞机结构设计、无人机结构设计。
1 无人机轻型结构具体设计1.1 动力方面的设计第一步对各个参量进行设置,设载重量W 1=6kg,空机质量W a =1kg,按设计规定推重比一定要适当,预取推重比K f =T /W 1+W a =0.4,知拉力T 应保持在2.8~3kgf这个范围内。
常规翼型其升阻比最好保持在50以上,通常情况下这个参量不会考虑诱导阻力这方面的影响,但是却在这种高升力飞机上占比相当大。
除此之外,如果翼型精确度不高同样会使升阻比低于预计值。
就算是把对机翼有影响的所有阻力都考虑到,其他部位还是会构成阻力,比如机身下面水袋构成的压差阻力等。
还有一个要点必须注意:飞机不会一直处于平行飞行状态。
如果遇到下降气流这种情况,抛开其他因素和情况,只在爬升这个过程中就要借助巨大的升力,不然便不能达到起飞距离l d ≤25m这个要求。
无人机机翼模态分析与结构优化设计
河南科技Henan Science and Technology 机械与动力工程总第804期第10期2023年5月无人机机翼模态分析与结构优化设计廖耀青(浙江安防职业技术学院,浙江温州325016)摘要:【目的】为避免无人机飞行中出现严重的气动弹性问题,针对无人机机翼刚度分布设计不合理之处,开展无人机机翼模态分析与结构优化设计。
【方法】基于正交试验设计提出一种基于模态分析的机翼变截面结构布局轻量化设计研究方案。
【结果】基于无人机机翼有限元仿真模型,开展机翼约束模态仿真分析,发现机翼在翼梁、翼肋等方面需要进行尺寸优化设计,进而改善机翼刚度。
并提出一种变截面翼梁结构,通过TOPSIS方法进行排序获取了最优解。
结果表明,优化后的机翼结构质量降低34%,机翼约束模态频率得到极大改善。
【结论】通过模态分析开展无人机机翼结构优化设计,可在满足刚度合理分布的同时,大幅度降低机翼总质量。
关键词:无人机机翼;模态分析;TOPSIS;结构优化中图分类号:V279文献标识码:A文章编号:1003-5168(2023)10-0048-06 DOI:10.19968/ki.hnkj.1003-5168.2023.010.010Modal Analysis and Structure Optimization Design of UAV WingLIAO Yaoqing(Zhejiang College of Security Technology,Wenzhou325016,China)Abstract:[Purposes]In view of the unreasonable design of the stiffness distribution of the UAV wing,in or⁃der to avoid serious aeroelastic problems in the flight of the UAV,the modal analysis and structural optimiza⁃tion design of the UAV wing were carried out.[Methods]Based on orthogonal experimental design,a light⁃weight design scheme of wing variable cross-section structure layout based on modal analysis was proposed. [Findings]Based on the finite element simulation model of the UAV wing,the wing constraint modal simula⁃tion analysis was carried out.It was found that the wing needed to be optimized in terms of wing beam and wing rib,which then improves the wing stiffness.On the other hand,a variable cross-section wing beam structure is proposed,and the optimal solution is obtained by TOPSIS method.The results show that the con⁃strained modal frequency of the optimized wing structure is greatly improved while the mass is reduced by 34%.[Conclusions]The optimization design of UAV wing structure through modal analysis can greatly re⁃duce the total mass of the wing while satisfying the reasonable distribution of stiffness.Keywords:UAVwing;modalanalysis;TOPSIS;structural optimization0引言无人机作为一个新兴产品,因其具有强大的机动性能、环境感知力等,在多个领域呈现出巨大的应用前景,如其广泛应用于航拍、环境检测、城市管理等。
基于粒子群的改进智能算法在载荷识别中的应用
第50卷第2期中南大学学报(自然科学版) V ol.50No.2 2019年2月Journal of Central South University (Science and Technology)Feb. 2019 DOI: 10.11817/j.issn.1672−7207.2019.02.013基于粒子群的改进智能算法在载荷识别中的应用谢兵1, 2,谢博群3,张猛3,曲先强3(1. 湘西南农村信息化服务湖南省重点实验室,湖南邵阳,422000;2. 湖南大学信息科学与工程学院,湖南长沙,410082;3. 哈尔滨工程大学船舶工程学院,黑龙江哈尔滨,150001)摘要:针对粒子群优化算法(PSO)无法处理反求问题中的病态问题,基于粒子群优化算法,通过遗传算法对粒子群优化算法进行改进,提出一种改进的粒子群优化算法(GAPSO),通过载荷识别对该方法进行验证,并应用于静态载荷识别和动态载荷识别算例中。
研究结果表明:改进后的粒子群优化算法既能使粒子群优化算法处理病态问题,又提高了反求问题的求解精度。
关键词:载荷识别;反问题;粒子群优化算法(PSO);遗传算法中图分类号:O342;TP311 文献标志码:A 文章编号:1672−7207(2019)02−0343−07 Application of improved intelligent algorithm based onparticle swarm in load identificationXIE Bing1, 2, XIE Boqun3, ZHANG Meng3, QU Xianqiang3(1. Key Laboratory of Information Service of Hunan Province for Rural Area of Southwestern Hunan,Shaoyang 422000, China;2. College of Computer Science and Electronic Engineering, Hunan University, Changsha 410082, China;3. College of Shipbuilding Engineering, Harbin Engineering University, Harbin 150001, China)Abstract: Considering that particle swarm optimization algorithm(PSO) cannot deal with ill-posed problem, an improved particle swarm optimization algorithm(GAPSO) was proposed by genetic algorithm based on particle swarm optimization.This method was verified by common inversion problems such as load identification. Finally, the improved optimization algorithm was applied in static load identification and dynamic load identification. The results show that the improved particle swarm optimization algorithm can not only solve ill-posed problems, but also improve the accuracy of inverse problem.Key words: load identification; inverse problem; particle swarm optimization algorithm(PSO); genetic algorithm在工程结构分析中,经常需要在已知载荷情况下分析结构是否达到要求,但缺少有效的手段来获取载荷。
面向狭小空间作业的超冗余机器人轨迹规划及控制研究

根据感知到的障碍物信息,实时调 整机器人的运动轨迹,以避免与障 碍物发生碰撞。
05
超冗余机器人在狭小空间 的应用案例及性能评估
应用案例一:管道检测与维护
场景描述
在城市地下管道系统中,需要检测和维修的管道往往由于空间狭小、环境恶劣等因素,难 以进行人工操作。超冗余机器人技术为这类场景提供了解决方案。
姿态控制
控制机器人的姿态,使其 在行进过程中保持稳定, 并避免与障碍物发生碰撞 。
速度控制
根据路径长度和环境复杂 程度,控制机器人的行进 速度,以确保安全性和效 率。
基于感知信息的自主导航与避障控制
感知信息
利用各种传感器获取周围环境 的信息,如距离、方向、障碍
物位置等。
自主导航
根据感知信息,计算机器人的位 置和姿态,并通过路径规划算法 确定行进方向。
02
国内外研究现状及发展趋 势
国内研究现状
国内机器人研究起步较晚,但发展迅速。
目前,国内对超冗余机器人的轨迹规划及控制研究主要集中在理论研究和实验室 阶段。
国内研究团队在超冗余机器人的设计和制造、运动学和动力学建模、轨迹规划和 控制器设计等方面取得了一些成果。
国外研究现状
国外对超冗余机器人的研究较早 ,已经进入实际应用阶段。
感谢您的观看
THANKS
展望未来的研究方向和挑战
深入研究超冗余机器人的感知和控制方法,提高机器 人的自主性和智能性。
加强与实际应用的结合,推动超冗余机器人在狭小空 间作业领域的应用和发展。
探索超冗余机器人在复杂环境下的适应性和鲁棒性, 拓展机器人的应用领域。
针对超冗余机器人的能耗和效率问题,开展节能减排 和优化设计研究,实现绿色制造和可持续发展。
基于改进量子粒子群优化算法的机器人逆运动学求解

02.
014
ji
开放科学(资源服务)标识码(
OS
ID):
I
nv
e
r
s
eKi
nema
t
i
c
sSo
l
u
t
i
ono
fRobo
t
sBa
s
e
donIQPSOAl
r
i
t
hm
go
CHENZhuo
f
an ZHOU Kun QIN Fe
i
f
e
i WANGB
i
n
ru
i
,
,
Schoo
lo
fMe
chan
i
c
a
landEl
r
s
ek
i
nema
t
i
c
ss
o
l
u
t
i
on;ob
e
c
t
i
vef
unc
t
i
on;imp
r
ovedquan
t
um
j
ywo
r
t
i
c
l
eswa
rmop
t
imi
z
a
t
i
on(
IQPSO)a
l
r
i
t
hm
pa
go
0 引言
各关节所对应的角度值.由于描述机器人结构的
工业机器人作为工业自动化领域的一个重要
数学模型具有非 线 性 的 特 点,因 此 整 个 求 解 过 程
算最优平均位置等方法设计了一种 改 进 量 子 粒 子 群 优 化 (
并联机器人的理论及应用研究
K;E;L<8@ 3? 9@; 9@;3<F L?M 9@; LNN4B8L9B3? 3= NL<L44;4 O;8@L?BEO <3:39
!" #$%& ’ ($)* +,- !) ’ .%/* 01- 2$ ’ .3$* 4" !) ’ 5)& / P8@334 3= Q;8@L?B8L4 R?HB?;;<B?HI >?@AB C?BD;<EB9F 3= G;8@?343HF,QLS L?E@L? !1#""!I T@B?L 0 16789%:8; UL<L44;4 O;8@L?BEO @LE :;83O; 9@; @39 $ N3B?9 =3< L 43?H 9BO; :;8LAE; 3= B9E @BH@ E9B==?;EEI @BH@ 8L<<FB?H 8LNL8B9FI @BH@ N<;8BEB3? L?M 43V O3D;O;?9 B?;<9BL5 G@; L89AL4B9F 3= 9@; 9@;3<F L?M 9@; LNN4B8L9B3? 3? NL<L44;4 O;8@L?BEO <3:39 B? 9@; V3<4M BE EAOOL<BW;M5 X9 BE L4E3 N3B?9;M 3A9 9@; MB<;89B3? 3= <;E;L<8@ B? 9@BE L<;L5 <3= .&9>7; <3:39Y NL<L44;4 O;8@L?BEOY 9@;3<FY LNN4B8L9B3? 对并联机构的研究最早可追溯上世纪中叶, Z3AH@ 早在 %,1, 年就采用并联机构制作了轮胎检测装置, 高级工程师 P9;VL<9 在 %,-& 年发表了题为 “ 引起了极大反 > U4L9=3<O VB9@ PB[ +;H<;;E 3= \<;;M3O] 的论文 ^ % _ , 如图 % 所示) 。 响, 因而奠定了他在空间并联机构中的开山鼻祖地位, 相应的机构称为 P9;VL<9 平台( P9;VL<9 平 台机构由运动平台和基平台及 - 根可以独立地上下伸缩杆构成。- 根支杆两端分别由球铰和虎克铰与运动 平台和基平台联接。 这样, 运动平台就可进行 - 个自由度的独立运动。 澳大利亚机构学教授 JA?9 于 %,). 年 提 出 将 并 联 机 构 作 为 机 器 人 机 构 ; 随 后 , QL88L44B3? 和 U@LO5 +5 G 首次将 P9;VL<9 机构按操作器设计,成功地将该机构 用于装配生产线, 并联机器人由此诞生。此后, 许多学者展开了 对并联机器人的研究。 随着研究的深入, 大量的研究成果不断涌 现。 相对于串联机器人来说并联机器人具有 ^ ! _ 以下优点: 刚度大, 结构稳定;" 承载能力强; ! 与串联机构相比, # 精度高; 串联机构正解易, 反 $ 运动惯性小;% 在位置求解上, 解难, 而并联机器人正解难反解易。 因机器人在线实时计算要求
近水面作业的机器人综合减摇研究
其 中
=
[vp r zO uw qx  ̄ 0] yp 6 6n 印 ]
]
() 6 () 7
() 8
“是 控制 向量 , 由控 制翼 、 和推进器 速度 给 出 : 舵 /=[ Z
Y是输 出状 态 向量 :
第2 2卷
第 8期
长
春
大
学
学
报
Vo _ No. l22 8
Au . 2 2 g 01
21 02年 8月
J OURN AL 0F CHA NGC HU UNI ERS T N V IY
近水 面作 业 的 机 器 人综 合减 摇 研 究
张立 华 ,吴 宏 圣 ,张 杰
A。 A = ={ .6 , 系统二 和子 系统 四的极 点值 是 A: / 一00 }子 =l ={ 00 , 一 .5}子系统 五 和子 系统 六 的极 点值 是 A 以 = ={一 .3 。由前面切 换 面 的计 算 公 式 可 以得 到切 换 面 为 : , 0 0 , ] C 00 } C =C =[. 6 1 , =C 4=[ . 5 00 ,
1 5 1 0
—
5 0
鎏s 一
一
1 0
图 2 PD控 制 器 减 摇 时 的横 摇 角 I
一
o
靼
t /S
图 3 变 结 构 控 制 器 减 摇 时 的 横 摇 角
第 8期
张立华 , : 等 近水面作业 的机 器人综合减摇研究
机器 人 的首鳍 用于 控制水 下潜 水 的深度 , 尾鳍 用于 控制 水 下机 器 人保 持姿 态 J 。图 2可 以看 出整 个 运 动 过程 中 , 摇角度 值在 0角度 处左 右变 化 , 且变 化 幅值 很 大 , 大 值达 到 1。可 以看 出角 度 变化 曲线 的 横 并 最 5, 对称 轴在 0角 度轴 以上 。 因此 可 以推测 , 因为 受 波浪 力 的作用 , 波 浪遭 遇 角 为 9 。虽 然 有 PD控 制 器 保 且 0, I 持姿 态 , 但近 水面机 器人 横摇 角一边 的摇 摆 幅值大 于另一 边 的摇摆 幅值 , 很可 能会 发生侧 翻 。而 图 3变结 构 控 制器 控制 的近水 面机 器人 , 以看 出横 摇角 度值 在 0角度值 处变 化 , 且变 化 幅值很 小 。 可 并 图 4可 以看 出整个运 动过 程 中 , 纵摇 角度 值在 0角度 处上 下 变化 , 且变 化 幅值 很 大 , 并 最大 值达 到 1。 2。 尤 其在 6 s 10 的仿真 阶段 , 摇 角 度值 始 终 在 0角度 值 上 。而 图 5变 结 构 控 制 器 控 制 的 近水 面机 器 0 至 2s 纵
一种基于动态耦合分析的高超声速飞行器协调控制方法[发明专利]
专利名称:一种基于动态耦合分析的高超声速飞行器协调控制方法
专利类型:发明专利
发明人:王玉惠,冯星凯,吴庆宪,张晓辉,侯思远,徐超
申请号:CN201910333259.0
申请日:20190424
公开号:CN110187715A
公开日:
20190830
专利内容由知识产权出版社提供
摘要:本发明公开了一种基于动态耦合分析的高超声速飞行器协调控制方法,包括:建立高超声速飞行器纵向系统模型;针对高超声速飞行器飞行特点,提出针对高超声速飞行器的动态耦合分析方法;将高超声速飞行器动态耦合分析方法应用于高超声速飞行器纵向系统模型,得出轨迹变量、姿态变量和控制输入变量间的动态耦合关系矩阵;利用得出的动态耦合关系矩阵,设计高超声速飞行器纵向系统协调控制器。
本发明从系统动态方程入手,得出的耦合关系矩阵为非线性的、动态的,更加全面客观的反应实际飞行状态下的耦合情况。
申请人:南京航空航天大学
地址:210016 江苏省南京市秦淮区御道街29号
国籍:CN
代理机构:南京苏高专利商标事务所(普通合伙)
代理人:徐红梅
更多信息请下载全文后查看。
基于等效静态载荷法的高速轻载机器人的结构动态优化设计_黄宇涵
Keywords: equivalent static load method; robot; flexible multibody system; topology optimization
1 引言
随着机器人技术向高速高精度应用领域的拓 展,对机器人的速度和加速度要求不断提高,要求机 器人更加 精 密 化 和 轻 型 化[1]。 而 机 器 人 在 高 速 运 动过程中将产生较大的惯性力,导致弹性部件变形, 甚至引起强烈的振动、噪声,使机构磨损乃至失效。 因此,为了追求高速运动和精度定位,必须对高速轻 载机器人进行优化设计,降低惯性冲击,提高动作灵 敏度[2,3]。
步数。
根据位移场等效原理,在任意时刻 t,等效静态
载荷将使物体产生与动态载荷相同的位移场,即
f
z eq
(
s)
= KL( b) zN( t)
( s = s0 ,s1 ,…,sn )
( 2)
式中,L 为线性静态分析; t 和 s 一一对应,即 t = ti 等 价于 s = si,总数是 n。所以,可得到 n 个等效静态 载荷。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
步数。
根据位移场等效原理,在任意时刻 t,等效静态
载荷将使物体产生与动态载荷相同的位移场,即
f
z eq
(
s)
= KL( b) zN( t)
( s = s0 和 s 一一对应,即 t = ti 等 价于 s = si,总数是 n。所以,可得到 n 个等效静态 载荷。
目前,把动态结构优化转化为静态结构优化问 题来求解的可行性已经得到了验证[8,9]。基于该思 想提出等效静态载荷方法,并应用于柔性多体动力 学的参数优化中。该理论方法由 Choi W. S. 、Park G. J. 、Kang S. C. 和 Shin M. J. 等于上世纪 90 年代最 先提出[8 - 10],随后 Kang 等[10]将该方法应用到了柔 性多体动力学响应优化中,等效静态载荷从柔性体 动力学方程导出,得到系列静态响应方程,该系列静 态响应问题的优化结构即为柔性多体动力学响应优 化解。该方法最终被 Altair 应用到 HyperWorks 软 件中,把动态结构优化转化为目前应用广泛的静态 结构优化。
2016 年第 50 卷 No. 4
27
基于等效静态载荷法的高速轻载机器人的结构动态优化设计
黄宇涵,杨志军,蔡铁根,陈超然
广东工业大学
摘要: 机构在高速运动时将产生较大的惯性力,导致弹性部件的变形而影响定位精度。高速轻载机器人的载
荷主要由惯性力引起,而传统 结 构 优 化 方 法 无 法 处 理 各 构 件 惯 性 力 互 相 耦 合 的 特 点。基 于 等 效 静 态 载 荷 法
明,两种优化方法对机构的优化均有一定效果。但在同等约束条件的情况下,对多个部件同时优化要优于对多个
部件单个优化,说明该方法对高速轻载机器臂的优化设计是有效的。
关键词: 等效静态载荷方法; 机器人; 柔性多体系统; 拓扑优化
中图分类号: TG739; TH161; TN249
文献标志码: A
DOI:10.16567/ki.1000-7008.2016.04.009
28
工具技术
荷都是静态力,优化过程由于结构变化引起惯性载 荷变化被忽略,导致优化机构过于保守。结构优化 技术在静态响应优化领域已经非常成熟,但这里结 构承受的外载荷都是静态力而非动态力。并且当机 构运动进入“高速”区域时,运动部件必须作柔性体 假设,形成“柔 性 机 构 ”。 此 时,由 于 机 构 部 件 间 隙 的存在及部件的刚体运动与其弹性变形耦合等问 题,动力学模型将以变系数、非光滑、多非线性项甚 至强非线性项组合的高维微分方程组形式出现,给 建模分析 和 优 化 带 来 困 难[7]。 虽 然 对 柔 性 多 体 系 统的动力学研究有很大的进步,但是对柔性多体动 力学系统的结构优化方面研究很少。
载荷为这一动态载荷在某一时刻的等效静态载荷。
等效静态载荷( ESL) 主要用来代替动载荷产生的影
响,在等效时,将每个计算时间步等效为静态分析的
一个工况。在动载荷下,物体最显著的特征是动载
荷下所造成的位移。因此,引入静态载荷,在任意时
刻使物体在静态载荷下产生的位移场与在动态载荷
下产生的位移场相同,即通过位移场等效原理引入
Keywords: equivalent static load method; robot; flexible multibody system; topology optimization
1 引言
随着机器人技术向高速高精度应用领域的拓 展,对机器人的速度和加速度要求不断提高,要求机 器人更加 精 密 化 和 轻 型 化[1]。 而 机 器 人 在 高 速 运 动过程中将产生较大的惯性力,导致弹性部件变形, 甚至引起强烈的振动、噪声,使机构磨损乃至失效。 因此,为了追求高速运动和精度定位,必须对高速轻 载机器人进行优化设计,降低惯性冲击,提高动作灵 敏度[2,3]。
等效静态载荷。在不考虑阻尼情况下,受动态载荷
结构的运动微分方程为
M( b,zN ( t) ) ¨zN ( t) + M( b,zN ( t) ) zN ( t) = f( t)
( t = t0 = t1 ,…,tn )
( 1)
式中,b 为设计变量; M、K 为质量矩阵和刚度矩阵,
是设计变量和位移矢量的函数; zN ( t) 为位移矢量; ¨zN( t) 为加速度矢量; f( t) 为第 t 个时间步的动态外 载荷矢量; 下标 N 说明为非线性分析; t 为时间的总
Structural Dynamic Optimization of High-speed Light Load Robot
Based on Equivalent Static Load Method ( ESLM)
Huang Yuhan,Yang Zhijun,Cai Tiegen,Chen Chaoran
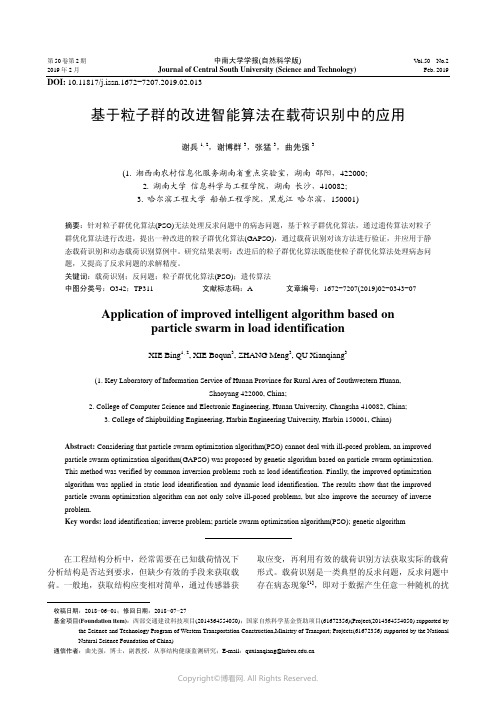
基于等效静态载荷原理的结构动态优化设计是 在动力学模型基础上的一种优化设计方法。在优化 过程中,可将分析出来的动态载荷作为结构优化模
2016 年第 50 卷 No. 4
29
型的载荷边界条件,并考虑结构质量和惯性的变化 对系统优化条件的影响。其结构动态优化设计的流 程如图 1 所示。
①设置初始设计变量和优化参数。其中: 循环 次数 k = 0,设计变量 b0 = bk,收敛误差参数 ε;
( ESL) ,可将非线性柔性多体系统动力学分析与线性结构静态优化相结合,实现在动态载荷下对结构部件的优化
来处理各构件惯性力相互耦合的特点。根据此方法运用两种不同优化形式在 HyperWorks 中进行拓扑优化设计:
一种是对多个部件同时优化分析,另一种是对多个部件单个优化分析( 单个优化之后,再进行组装分析) 。结果表
根据有 限 元 理 论,静 态 线 性 分 析 中 有 如 下 表
达式
KL ( b) zL ( s) = fzeq ( s) ( s = s0 ,s1 ,…,sn )
( 3)
由式( 2) 和式( 3) 可知,线性静态分析工况下得
到的静态矢量位移 zL( s) 等于其对应时刻节点非线 性动态位移矢量 zN ( t) 。即在等效静态载荷作为外 力施加于静态线性优化中时,静态线性响应优化的
根据位移场等效原理得到等效静态载荷,并用在结
构优化中。总而言之,等效静态是以设计为导向的
载荷,而不是以分析为导向的载荷。
2 等效静态载荷方法
3 结构动态拓扑优化技术及设计过程
等效静态载荷的定义: 当结构承受动载荷时,在
某一时刻结构都发生变形从而形成一个位移场。如
果一个静态载荷能够产生相同的位移场,则该静态
位移与动态非线性的位移相同。并在静态线性优化
中,将等效静载荷作为多工步载荷施加于结构上。
从式( 1) 可以看出,等效静态载荷只有在对结
构进行瞬态分析后才能计算得到。即等效静态载荷
计算的是已知位移场。从这个角度来看,等效静态
载荷没有任何意义。但这里研究的不是利用等效静
态载荷来预测动态载荷产生的变形情况,而是希望
密度。在寻找给定材料的拓扑结构过程中,中间密
度值是没有意义的。因此,必须引入惩罚中间密度
并迫使最终的设计变量为 0 或 1 为每个元素的密
度。此技术方程为
K( ρ) = ρp K
( 4)
式中,K、K 分别代表单元的惩罚刚度和真实刚度; ρ 是结构的密度; p 是惩罚因子,且总是大于 1。
3. 2 结构动态拓扑优化设计过程
3. 1 拓扑优化技术
在 HperWorks 中,OptiStruct 使用变密度法解决
拓扑优化问题,即根据每个单元物质密度定为 0 或
1( 定义元素为空或固体) 。变密度的方法是把每个
单元的物质密度作为设计变量,并不断在 0 和 1 之
间变化,中间值的密度代表虚构的材料。
一般来说,最优解的问题涉及优化区域的中间
近年来,国内许多学者对工业机器人的结构优
基金项目: 国家自然科学基金( 2015A030312008) 收稿日期: 2015 年 11 月
化做了许 多 有 价 值 的 研 究。 张 刚[4] 通 过 对 机 器 人 进行动力学和静力学分析,提取了极限工况下 L 臂 的载荷谱,并对机器人进行了拓扑优化,达到了轻量 化以及提 高 了 动 力 学 性 能。 梅 江 平 等[5] 对 机 器 人 模型中零件底座、末端执行器进行静力学分析,并根 据分析结果优化其结构,然后对整机在最大载荷情 况下的几个典型位姿进行分析,进一步优化杆类零 件壁厚,提高了机器人的静刚度和动力学性能。郑 暾[6]对机器人的关键承载部件进行了分析和简化, 采用实验设计的方法( DOE) 进行静力学分析,运用 Isight 优化方法对得到的分析结构进行进一步优化, 减轻了其重量、提高了定位精度。由此可知,现有工 业机器人机构的优化设计主要采用最危险工况法和 载荷历程法对各构件进行单独优化设计,承受的载
Abstract: Being in a high - speed movement,the organization will produce large inertia force and then lead to the deformation of the elastic components which might affect the accuracy of position. The load of high - speed light load robot is mainly caused by the inertia force. The traditional structure optimization method cannot handle with the component of inertial force coupling with each other. So it can combine a linear static structure optimization with a nonlinear dynamics analysis of flexible multibody system based on equivalent static load method( ESLM) ,and optimizing the structure of components to deal with the component of inertial force coupling with each other under dynamic loads. According to this method,two different optimization forms for topology optimization design in HyperWorks are used. One is the multiple components optimization analysis simultaneously,the other is a single optimization analysis of the multiple parts( single optimization first, and then assemble analysis) . The results show that the two methods of optimization indeed have certain effect on the optimization of organization. However,under the same constraints,to optimize multiple components simultaneously is superior to the single optimization of multiple parts,which shows that the method of optimization multiple components simultaneously is effective on optimization the design for high speed light load robots.