MW级风力发电机组偏航控制系统
风力发电机组偏航控制系统技术分析及应用

风力发电机组偏航控制系统技术分析及应用风力发电作为可再生清洁能源,能够实现将风能进行转化为电能加以利用,在能源替代与节能减排的低碳电力发展中扮演重要角色。
风速具有概率随机性和参数模糊性的多重不确定性特征,需要对风力发电机组进行偏航控制,本文详细对风力发电机组偏航控制系统技术进行了分析,并介绍了风力发电机组偏航控制系统技术的相关应用情况。
标签:风力发电;机组;偏航;控制技术0 引言风能作为一种清洁的可再生能源而越来越受到人们的关注,作为风能利用的主要形式,风力发电备受瞩目。
风力发电过程中,风向可能会随时变化,这就需要对风电机组进行偏航控制。
偏航控制是在可用风速范围内对风电机组自动准确控制,从而提高风能的利用率。
目前偏航角度的测量通常采用电位计的方式进行,由于电位计的本身特性缺陷,以及电位计输出的信号极易受到外界的干扰,而且,电位计的长期使用也可能会使得偏航角度对应的信号出现异常,需要对偏航角度的测量方法加以改进,提高风力发电机组偏航控制系统的控制性能。
本文首先分析了风力风电机组的基本结构和基本原理,之后阐述了风力发电机组具体的偏航控制技术。
1 风力发电机组1.1 海上风电概述当下我国正在进行能源转型,走绿色发展道路已经成为共识,海上风电则是推动这一战略早日落地的重要力量。
对中国来说尤其如此,我国沿海11个省份的GDP约占全国的一半,总能耗也占全国的一半左右。
对于这些地区而言,海上风能资源丰富,新能源电力消纳能力强,大力发展海上风电将是加快能源转型进程的重要手段。
目前我国海上风电开发已经进入了规模化、商业化发展阶段。
我国海上风能资源丰富,根据全国普查成果,我国5~25米水深、50米高度海上风电开发潜力约2亿千瓦;5~50米水深、70米高度海上风电开发潜力约5亿千瓦。
根据各省海上风电规划,全国海上风电规划总量超过8000万千瓦,重点布局分布在江苏、浙江、福建、广东等省市,行业开发前景广阔。
近年来海上风电得到了大力发展,国家出台了多项政策鼓励发展海上风电,并走出国门开始与国外共同开发海上风电资源。
偏航软启动系统故障分析——以云南某风场为例
【摘要】偏航系统是风电机组的核心系统之一,对控制机组稳定和保证机组发电量起着重要作用。
本文针对云南某风场1.5MW机组,增加偏航软启动系统后出现的偏航系统故障,进行故障录波和逻辑分析,有效地降低了故障发生率,以此提高偏航系统的稳定性,保证机组平稳可靠运行。
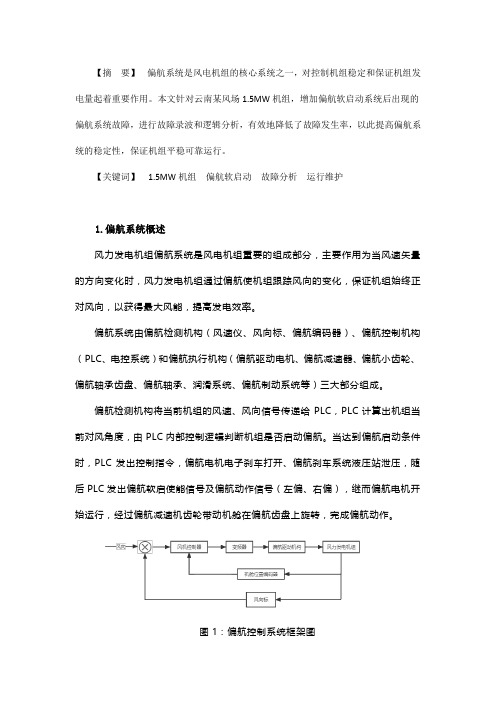
【关键词】 1.5MW机组偏航软启动故障分析运行维护1.偏航系统概述风力发电机组偏航系统是风电机组重要的组成部分,主要作用为当风速矢量的方向变化时,风力发电机组通过偏航使机组跟踪风向的变化,保证机组始终正对风向,以获得最大风能,提高发电效率。
偏航系统由偏航检测机构(风速仪、风向标、偏航编码器)、偏航控制机构(PLC、电控系统)和偏航执行机构(偏航驱动电机、偏航减速器、偏航小齿轮、偏航轴承齿盘、偏航轴承、润滑系统、偏航制动系统等)三大部分组成。
偏航检测机构将当前机组的风速、风向信号传递给PLC,PLC计算出机组当前对风角度,由PLC内部控制逻辑判断机组是否启动偏航。
当达到偏航启动条件时,PLC发出控制指令,偏航电机电子刹车打开、偏航刹车系统液压站泄压,随后PLC发出偏航软启使能信号及偏航动作信号(左偏、右偏),继而偏航电机开始运行,经过偏航减速机齿轮带动机舱在偏航齿盘上旋转,完成偏航动作。
图1:偏航控制系统框架图2.偏航软启系统云南省某风电场1.5MW机组存在偏航电气回路断路器跳闸、机组晃动大等问题。
在偏航回路增加变频器,基于变频器驱动的柔性自学习偏航系统,是对原偏航系统的有效技术改造,目的是实现偏航系统的软启动、软停止,使风机运行平稳,减少振动和机械冲击对风机带来的损害;同时减少启动电流对电机的冲击,延长电机寿命,提升机组可利用率和发电量,实现风电场提质增效。
图2:偏航软起原理图3.偏航系统问题说明系统投运半年后频繁出现由偏航相关的故障引发的机组停机现象。
通过对现场出现的故障统计分类,偏航故障主要有两类:一类是变频器自身故障,主要为电机过速、供电电源欠压、供电电源过压、电机过载、母线电压高等,此类故障发生频率很高,为普遍性故障;一类是机组偏航系统相关故障,主要为偏航传感器方向错误、偏航传感器故障,此类故障为偶发性故障,集中发生在个别几台风机组。
风力发电机组偏航控制系统设计

风力发电机组偏航控制系统设计一、引言二、偏航控制系统的功能偏航控制系统的主要功能是实时监测风向,并控制风轮的转向,使其与风向保持一致。
具体功能包括以下几个方面:1.风向传感器:获取当前的风向信息。
2.控制算法:根据风向传感器的数据计算需要偏航的角度,并输出控制信号。
3.控制执行部分:根据控制信号,驱动偏航装置,使其实现风轮的转向。
三、偏航控制系统的设计要求1.稳定性:偏航控制系统需要保证在各种天气条件下都能稳定工作,即使在强风或恶劣天气下也能可靠控制风轮的转向。
2.灵敏性:系统需要快速响应风向变化,并及时调整风轮的转向,以最大化风能转化效率。
四、偏航控制系统的设计方案1.风向传感器的选取:选择高精度、高灵敏度的风向传感器,能够准确地获取当前的风向信息。
2.控制算法的设计:采用先进的控制算法,如模糊控制、PID控制等,根据当前风向和期望风向之间的差异,计算偏航的角度,并输出控制信号。
3.控制执行部分的设计:根据控制信号,选择合适的偏航装置,如电动执行器或液压执行器,进行风轮的转向控制。
五、偏航控制系统的实施和测试1.系统的实施:根据设计方案,搭建偏航控制系统的实验装置,进行系统的实施和调试。
2.系统的测试和评估:对实施后的偏航控制系统进行测试和评估,包括稳定性测试、灵敏性测试和抗干扰性测试等。
六、偏航控制系统的性能提升方案1.优化风向传感器:选择更高精度、更高灵敏度的风向传感器,以提高系统的测量精度和响应速度。
2.改进控制算法:采用更先进的控制算法,如模型预测控制、自适应控制等,进一步提高系统的控制精度和响应速度。
3.优化控制执行部分:选择更高性能的偏航装置,如脉冲宽度调制执行器等,以提高风轮转向的准确性和稳定性。
七、结论本文详细介绍了风力发电机组偏航控制系统的设计,包括系统的功能、设计要求和设计方案等。
通过实施和测试,可以验证系统的性能,并提出性能提升方案,进一步提高系统的稳定性和效率,为风力发电行业的发展做出贡献。
MW级风力发电系统偏航控制器的硬件设计

MW级风力发电系统偏航控制器的硬件设计关 开(华北电力大学,河北石家庄 050000) 摘 要:本文中利用PLC 作为偏航控制器,单片机为主的外围电路作为P LC 的信号转换和处理单元。
通过对各种信号的转换、处理,匹配成PLC 能够接受的信号,再通过P LC 实现的偏航控制程序,输出相应的控制信号控制执行机构,来达到自动对风的目的。
关键词:风能;偏航控制器;单片机 中图分类号:T K83 文献标识码:A 文章编号:1006—7981(2012)12—0074—02 风能作为一种清洁的可再生能源,越来越受到世界各国的重视。
其蕴量巨大,全球的风能约为2×107MW,其中可利用的风能为2.74×109MW 。
如何有效、高效的利用风能就是偏航控制系统所要解决的问题。
偏航控制器是偏航控制系统的控制机构,在偏航控制系统的信号下,做相应的动作。
由于风力机所处的工作环境比较特殊,一般情况下都是些恶劣的自然气候如大风,冰雹等,所以对控制器的抗扰动要求就比较严格。
在恶劣环境中不受影响的或能把影响限制在最小范围是偏航控制器最基本要求。
1 偏航控制系统简介偏航系统是水平轴式风力发电机组必不可少的组成系统之一。
偏航系统的主要作用有两个:其一是与风力发电机组的控制系统相互配合,使风力发电机组的风轮始终处于迎风状态,充分利用风能,提高风力发电机组的发电效率;其二是提供必要的锁紧力矩,以保障风力发电机组的安全运行。
偏航系统一般由偏航轴承、偏航驱动装置、偏航制动器、偏航计数器、纽缆保护装置、偏航液压回路等几个部分组成。
偏航控制系统主要具备以下几个功能:风向标控制的自动偏航;风向标控制的90°侧风;自动解缆;人工偏航,按其优先级别由高到低依次为:顶部机舱控制偏航、面板控制偏航、远程控制偏航。
图1 偏航控制系统框图偏航控制系统是一个随动系统,是风力发电机组电控系统的重要组成部分。
偏航控制系统可实现在规定风速范围内自动准确对风,在非可用风速范围内能够90°侧风,在连续跟踪风向可能造成电缆缠绕的情况下自动解缆,从而使风力发电机能够平稳可靠的运转,高效地利用风能,节约了大量能源,进一步降低发电成本并且有效地保护风力发电机。
风力发电机及偏航系统

风力发电机及偏航系统引言:风力发电是一种利用风能将其转化为电能的发电方式。
它是一种环保、可再生的能源,可以帮助减少对传统化石燃料的依赖,并减少排放。
风力发电机是风力发电的核心设备,而偏航系统是确保风力发电机能够高效运行的关键部件。
本文将从风力发电机的原理、构造和工作原理以及偏航系统的功能、原理和优化等方面进行阐述,以帮助读者更好地理解风力发电机及偏航系统的工作原理与应用。
一、风力发电机1.原理2.构造3.工作原理当风力吹过风力发电机的叶片时,叶片产生升力,并形成一个扭转力矩。
这个扭转力矩通过轴传递给发电机,进而带动发电机转子旋转。
转子内部的磁场与绕组相互作用,产生感应电动势,从而产生电能。
二、偏航系统1.功能偏航系统是风力发电机中的重要部分,其主要功能是使风力发电机始终面向风向,以利用风能的最大化。
偏航系统可以通过调整发电机的方向来适应风的变化,确保叶片始终相对于风的方向。
2.原理偏航系统通常由风向传感器、控制器和驱动器等组成。
风向传感器负责感知风的方向,控制器根据风向数据和预设参数进行判断和计算,驱动器则通过调整发电机的方向来控制风力发电机的偏航。
3.优化为了提高风力发电系统的效益,偏航系统的优化也尤为重要。
通过采用更先进的风向传感器、控制算法和驱动器技术,可以提高偏航系统的准确性和响应速度,进而提高风力发电机的发电效率。
结论:风力发电机及偏航系统是风力发电的重要组成部分,其工作原理和优化对风力发电系统的效益起到至关重要的作用。
理解和掌握风力发电机及偏航系统的原理和应用,对于推广和应用风力发电具有重要的指导意义。
随着技术的不断进步,风力发电的效率和可靠性将继续提升,为可持续发展和环境保护做出积极贡献。
风力发电机组偏航系统详细介绍
风力发电机组偏航系统详细介绍一、引言随着可再生能源的快速发展,风力发电成为了新兴的清洁能源选择之一、风力发电机组的偏航系统是其核心组成部分之一,它能够使风力发电机组在不同风向下旋转,实现最大风能有效利用。
本文将详细介绍风力发电机组偏航系统的原理、构成和工作过程。
二、原理1.风向感知:通过风速传感器和风向传感器,实时感知风的强度和方向。
2.控制系统:根据风向传感器的反馈信息,计算出偏航控制参数,并传递给执行机构。
3.执行机构:根据控制系统的指令,调整风轮的朝向,使其与风向保持一致。
三、构成1.传感器:风力发电机组偏航系统中的传感器主要包括风速传感器和风向传感器。
风速传感器用于感知风的强度,而风向传感器则用于感知风的方向。
2.控制系统:控制系统是风力发电机组偏航系统的核心部分,主要包括控制算法和控制器。
控制算法根据风向传感器的反馈信息计算出偏航控制参数,而控制器则将这些参数传递给执行机构。
3.执行机构:执行机构负责调整风力发电机组的朝向,使其与风向保持一致。
常见的执行机构包括偏航控制器、偏航电机等。
四、工作过程1.感知风向:风力发电机组偏航系统通过风向传感器感知风的方向。
2.计算控制参数:根据风向传感器的反馈信息,控制算法计算出偏航控制参数。
3.传递控制参数:控制器将计算得到的偏航控制参数传递给执行机构。
4.调整朝向:执行机构根据控制参数的指令,调整风力发电机组的朝向,使其与风向保持一致。
5.持续监测:风力发电机组偏航系统持续监测风的方向,根据实时的风向信息进行调整,实现持续稳定的发电。
五、总结风力发电机组偏航系统是风力发电的关键技术之一,它能够在不同风向下实现最大风能有效利用。
本文详细介绍了风力发电机组偏航系统的原理、构成和工作过程。
通过合理的感知、计算和调整机制,风力发电机组能够始终面向风向,实现高效稳定的发电效果。
随着风力发电技术的不断发展,风力发电机组偏航系统也将不断完善,为可再生能源的发展做出更大的贡献。
基于模糊PID自适应控制MW级风力发电机偏航控制系统设计
授 、 北师 范大 学兼 职 硕 士 生 导 师, 东 吉林 省 重 点 学科—— 电力
系统及 其 自动化 学术 带 头人 , 吉林 省 自动化 学会 理 事 , 吉林 省
风 能 、 阳能学会理 事 。 多年 来致 力于风 力发 电技 术和 智 能控 太
摘 要 : 用模 糊 P D 自适应 偏 航 控制 算 法 实现 偏 采 I 航 系统 自动跟踪 风 向变化 调整风 轮位 置 。输入 量为
随动 控制 器来 控制偏 航 系统 , 难建 立数 学模 型 , 很 导 致执 行 机 构 必将 因 为 频 繁 动 作 而 易 损 坏 。而 模 糊
综合 自动化通 信管理 机 系统” 得 吉林省 科技进 步 三等 奖 ; 智 获 “ 能指纹 识别存取 包 柜” 得 吉林 省 高等 学校 自然科 学优 秀 成果 三 等 奖。公 开 发表 学 术论 文 2 获 0余 篇 , 中被 其
各种 检 索系统 收录 6篇 , 参编论 著 2本 , 得 专利 1项 。 获
) +
() 1
输 出 的模 糊 P D 自适 应 偏航 控 制模 型 , 计 了一 种 I 设 模糊 自适 应控 制器 , 实现 了偏航 系统控 制 。
4 8
长 春 工 程 学 院学 报 ( 自然 科 学 版 )
2 模 糊 控 制 器 设计
离散 P D控制 算法 为 : I
( )一 k e 忌 + 是 p( )
文 只讨论 了模 糊 P D控 制 器 的设计 , 于整个 系统 I 对
真 , 出 了仿 真 结 果 , 风 机 跟 随 风 向 的 变 化 而 变 给 使 化 , 高风 能利用 率 , 免 了执 行机 构 频 繁 的动作 , 提 避 优化机 组 性能 , 证 了偏 航 控制算 法 的有效 性 。 验 关 键词 : 偏航 控 制 系统 ; 糊 P D 控 制 ; 制规 则 ; 模 I 控
风力发电机组偏航控制系统的设计分析
线 方 向和 风 向相 一致 。 2 . 2 . 2手 动偏航 功能 手 动 偏 航 控 制 主 要 包 括 了 人 工 进 行 顶 部机 舱 控 制 、 面 板 控 制 以及 远程控制偏航这三种方 式。 2 . 2 I 3自动解缆 功能 自动 解 缆 功 能 是 偏 航 控 制 器 通 过 检 测 偏 航 角 度 、 偏 航 时 间 以及 偏 航 传 感 器 ,
蜀 航控制系统 的分 类与组成
编航 控 制 系统 的分 类
偏航 控制 系 统主 要可 分为 被动 偏航 控制
E 和 主 动 偏 航 控 制 系 统 两 种 。其 中 ,被 动 偏
圈数时 ( 可根据实际情况设置 ),如果风力发 控 制器 来 实现 的。 由于 风 向瞬 时波动 频繁 , 电 机 组 处 于 暂 停 或 启 动 状 态 时 ,则 系 统 可 控 制 但 幅 度 不 大 , 通 常 设 置 一 定 的 允 许 偏 差 , 如 自动解缆;如发 电机组正处于运行状态时 ,则 ± 8 。 ,如果在 此偏差 范围 以内,即可 认为是对 中心控制器将不允许解缆,偏航控制系统应继 风状态 。 续进行正常偏航和对风跟踪 。如偏航控制器检 当风轮偏航 信号经过 放大和模 数转换后 , 测到扭缆状态达到保护极限时 ,偏航控制器通 进 入到 C P U 中进 行处 理,再将 所得 的数据 处 过软件 系统请 求中心控制器正常停机 ,此时 中 理 结果经 过数模转换后输 出,并经过功率放 大 心控制 器 允许偏 航控 制系 统强 制执 行解缆 动 驱动 执行机构。如果系统需进行人工操作 ,还 作。当解 缆完成后,偏航控制系统会发送解缆 可 以通 过 人机 交互 平 台得 以实现 ,C P U还 可 完 成信 号 。 用 于 和主 控 制 器 之 间 的 信 号 交 换 。 2 . 2 . 4 9 0 。 侧 风 功 能 2 . 1 . 2偏航 执行机构设计 风力发 电机组 的 9 O 。 侧风功能 是在风轮过 偏 航 执 行 机 构 主 要 由偏 航 轴 承 、 偏 航 电 速 或 遭 遇 切 出 风 速 以上 的 大 风 时 , 控 制 系 统 为 动机 、偏航减速机、偏航小齿轮 、偏航齿 圈、 了保证风力发 电机组的安全,控制系统将对机 制 动器、偏航液压回路等设备所构成 。 舱进行 9 0 。 侧 风偏航 处理 。正是 由于 9 0 。 侧风 其 中,对 于偏航 减 速机 的 设计 ,由于 偏 功能是在外界风力对发 电机组有较大影响的条 航 速度低,驱动装置 的减速器通常采用 的是多 件 下,为确保机组安全所采取的措施 ,因此在 级 行星减速器或者蜗轮蜗杆与行星 串联的减 速 该情况下 ,应 当使机舱走最短路径 ,并应 当屏 器 。根据机组偏航传动系统 的结构 需要,可 以 蔽 自动偏航指令 。在侧风结束后 ,还应 当抱 紧 布置 多个减速机驱动装置 。装配时必 须通 过齿 偏航制动盘 ,同时当风 向发生变化 时,需继续 轮 啮 合 间 隙 调 整 机 构 正 确 调 整 各 个 小 齿轮 与 齿 追踪风 向的变化 , 以确保风力发电机 组的安全 。 圈 的 相 互 位 置 , 使 各 个 齿 轮 副 的 啮 合 状 况 相 一 9 O 。 侧 风 功 能 的 控 制 过 程 与 自动 偏 航 功 能 的 控 致 , 以 避 免 出 现 卡 滞 或 偏 载 问题 。 制相类似 。 2 . 1 . 3偏 航 传 感 器 设 计
兆瓦级风力发电机组偏航系统主动偏航特性分析
2 0 1 4 年
湖
南
大
学
学
报 (自 然 科 学
J o u r n a l o f Hu n a n Un i v e r s i t y ( Na t u r a l S c i e n c e s )
Ab s t r a c t :Th e y a w s y s t e m o f t h e me g a wa t t — c l a s s wi n d t u r b i n e p r o d u c e d s e v e r e v i b r a t i o n i n t h e p r o c e s s
r a d , 振 动衰 减的 时 间超过 了 2 0 S , 通过 在 主 机 架 上加 反 馈 控 制 可快 速 消 除 兆 瓦级 风机 偏 航
系 统 来 回 振 荡现 象.
关键 词 : 风 力发 电机 组 ; 偏航 系统 ; 主 动偏航 ; 固有频 率
中图分 类号 : TK8 3 文献标 识码 : A
J a n .2 0 1 4
文章 编号 : 1 6 7 4 — 2 9 7 4 ( 2 0 1 4 ) 0 1 — 0 0 5 7 — 0 6
兆 瓦级 N - t ;  ̄发 电 机 组 偏 航 系 统 主 动 偏 航 特 性 分 析
鄂 加 强 , 陈 燕 , 李振 强, 钱 承
E J i a — q i a n g 。CHEN Ya n。LI Z h e n — q i a n g,QI AN C h e n g
( Co l l e g e o f Me c h a n i c a l a n d Ve h i c l e E n g i n e e r i n g-Hu n a n Un i v 。C h a n g s h a 。Hu n a n 4 1 0 0 8 2 .Ch i n a )
FM350在MW级风力发电机组偏航控制系统中的应用
Abs r c Th a e il rs n st ef n t n o h a c n r l y tm n M W n e e a o sa d i t a t: e p p rman y p e e t h u c i ft e y w o to s e i o s wi d g n r t r n t s
Ke r s: a c n r ls se f n to d l f y wo d y w o to y t m;u cin mo u eo FM 3 0 2 EM I 5- ;
2 偏 航 控 制 系 统 1 引言
在 风力 发 电机 组 控制 中 , 航 控制 系统控 制 的精 偏
sr cu e M e n i lb r t d a t g s o tu t r . a wh l e a o a e a v n a e f FM 3 0 f n to d l . h a i o h s a s h me wh c e 5 u c i n mo u e On t e b ss f t i , c e ih
2 1 系统 的硬件 .
主要 有 : 偏航 电机 , 旋转编 码 器 , 风速 风 向传感 器 ,
FM 3 0, 5 CPU 3 5— 2 1 DP 。
确 与 否直 接 影 响利 用 风 能的 效率 [ , 风力 发 电机 发 1即 ]
电的多 少 。同时偏 航控 制系统 控制 不精 确也 会使 风机 系统 遭 受不必 要 的外力 破坏 。要想 使偏 航控制 系统 精 确 地控 制 风机 , 需要 使 整个 发 电机组 的 中央 处 理 单 就 元 ( P 时时清 楚 风 机准 确 的实 际位 置 , C U) 以便 做 出准 确 的控制 。因此知道 风 机的准 确位 置显得 非常 重要 。 过 去 , 风 机 曾 采 用 单 片 机 做 为 核 心 控 制 单 元 小 ( P , 用其 中 的记 数 功 能 记 录 风 机 实 时 位置 , C U) 采 但 现 在 由于 风机 的容 量 很大 , 制 柜 中有 很 大 的 电压 和 控 电流 经过 , 能产 生强 大 的磁场 , 柜 中的控 制核 心单 片 对 机 产生 强大 的电磁干 扰 , 易使单 片机产 生误 动作 , 容 造 成 巨大 损失 。 了避 免这 种情况 发 生 , 们采用 西 门子 为 我 S —3 0系 列功 能强 大 抗 干 扰性 好 的 C U3 5 DP 7 0 P 1 —2 来保证 控制核 心单 元 的控 制准 确 。同时 采用 了西 门子 公 司的 高抗 干扰 高集 成 的 F 5 M3 0功 能模 块 来 实 时准 确记录 风机 所处 的实际 位置 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
№.4 陕西科技大学学报 Aug.2009・76・ J OU RNAL OF SHAANXI UN IV ERSIT Y OF SCIENCE &TECHNOLO GY Vol.27 文章编号:100025811(2009)0420076204MW 级风力发电机组偏航控制系统的设计常 杰1,孟彦京1,朱玉国1,2,陈红利1(1.陕西科技大学长星风力发电实验室,陕西西安 710021;2.山东长星集团有限公司,山东滨州 256206)摘 要:为了能够在较大风速范围内运行,提高风能利用效率,更好的发挥风机性能,MW 级风力发电机组均采用偏航控制,偏航系统是整个风机电控系统的重要部分.作者介绍了偏航控制系统在MW 级风电机组中的功能及结构,在此基础上,重点论述了如何在偏航控制系统中实现自动校正、故障报警,以及如何防止重大事故的发生.该系统采用西门子公司的S72300系列PL C 作为主控系统,具有较高稳定性、可靠性.系统自运行以来,各项功能正常,设备运行稳定,完全达到了设计要求.关键词:风力发电机;偏航控制系统;自动校正;安全容错中图分类号:TN762;TM315 文献标识码:A0 引言风力机偏航系统分为被动偏航和主动偏航两种类型,MW 级风力发电机组中常常采用后者.为了保证风力发电机组发挥最大性能,机舱需要准确对风,偏航控制系统控制的精确与否直接影响利用风能的效率,即风力发电机发电的多少,同时偏航控制系统控制不精确也会使风机系统遭受不必要的外力破坏,因此对风机的自动准确定位显得非常重要.另一方面,由于大型风力发电机组的建设成本很高,偏航控制系统的故障报警及提高风机运行的安全可靠性也是非常必要的.本系统利用西门子公司的高抗干扰、高集成的FM350功能模块来实时准确记录风机所处的实际位置,用闭环控制方式实现对风向与叶轮轴线方向偏差的自动准确校正,并通过软件设计与电路设计分别实现容错功能,当风机处于危险情况时采取停机以保证风机安全,当风机出现故障时显示故障报警信号.图1 系统结构图1 偏航控制系统的结构系统采用DELL (19″)作为PC 机,PC 机监控系统采用西门子WinCC6.0软件.控制站选用SIEM ENS S72300,采用SIM ENS 公司的STEP7语言进行编程.PL C 与上位机采用Profibus 2DP 通讯,PL C 的通讯模块为CP343.系统结构如图1所示.系统的硬件组成主要有:偏航电机、增量式编码器、非接触式位置传感器、风速风向传感器、FM350、CPU31522DP 、上位机WinCC 、CP343.各部分的功能如下:(1)偏航电机:为风力发电系统中风机对风及解缆的执行机构,使风机随着风向的变化而转动,准确对风.(2)旋转编码器:偏航电机运行的速度位置反馈信号.3收稿日期:2009-05-16作者简介:常 杰(1982-),男,陕西省渭南市人,在读硕士生,研究方向:电力电子与电力传动第4期常 杰等:MW 级风力发电机组偏航控制系统的设计(3)非接触式位置传感器:作为机舱的位置冗余控制的参考值.(4)风速风向传感器:将风速、风向信号转换成4~20mA 的电流信号传送给CPU31522DP.(5)FM350:记录旋转编码器反馈回来的脉冲信号,并把记录数值传送给CPU31522DP.(6)CPU31522DP :它是风力发电机组的中央处理单元,接收绝对正北方向信号、风向风速信号和FM350传给它的风机所处的实际位置信号,经过逻辑处理把精确的控制命令传给执行机构即偏航电机[123].(7)上位机WinCC :以图形和表格形式显示系统运行状态、系统故障等信息.图2 偏航系统功能模块(8)CP343:实现上位机与控制系统之间的通讯.2 控制系统的功能实现偏航系统是风力发电机组特有的伺服系统.系统共包含5个模块[426]:侧风待机模块、故障诊断模块、容错保护模块、风向校正模块、自动解缆模块,系统功能模块如图2所示.(1)侧风待机模块:非可用风速情况下,风机采取90°侧风并使其处于待机状态.图3 基本控制流程图(2)故障诊断模块:检测风机各部分有无故障,并采取故障报警.(3)容错保护模块:防止由于误操作而同时发出偏航电机正转与反转命令,避免对风机造成破坏.(4)风向校正模块:当风速在可用风速范围内时风轮跟踪变化稳定的风向.(5)自动解缆模块:当风力发电机组由于偏航作用导致机舱内引出的电缆相互缠绕时,自动解除缠绕[3].2.1 自动准确校正的实现在偏航过程中,只有当叶轮轴线方向与风向一致时才能够提高发电效率,这样就需要解决电机的起动和转向问题.为了确定电机的转向使风力机转过最短路径,即偏航时间最短,就水平轴风力机而言,当风向改变,超过允许误差时,偏航方向与偏航角度根据风向和风力机叶轮轴线方向的夹角的不同有以下两种情况:(1)风向与风力机叶轮迎风面法线方向角度差小于180°时,偏航电机正转,偏航角与风向相等.(2)当风向与风力机叶轮迎风面轴线方向角度差大于180°时,偏航电机反转,偏航角为360°与风向的差[2].自然风经过叶轮之后会产生湍流,风向传感器因为湍流作用将不停摆动,风力发电机组的中央处理单元CPU31522DP 中得到的风向值不停的变化,所以要实现偏航过程中的自动准确校正.一方面,只有当风向改变超过允许的角度范围一定时间后才能给偏航电机动作命令;另一方面,增量式编码器实时采集机舱位置,利用闭环控制使机舱转至准确位置后偏航电机停止动作.基本工作流程图如图3所示.2.2 容错、保护功能的实现随着现代风力发电机组单机容量的不断增大,机组的建设成本不断增大,要使风机正常运转,首先要确保风电机组的安全.显然,如何提高在自然环境下工作运行的风力发电机组的安全性能至关重要.在风力发电机组偏航过程中,当风向与风力机叶轮轴线夹角超过误差范围时,风力机就会按照最短路・77・陕西科技大学学报第27卷径使机舱转动相应角度进行自动校正,这个过程中可能正转也可能反转.如果向某方向转动角度过多形成积累,机舱引入塔架的发电机电缆将处于缠绕状态,当单方向转动角度积累至720°并且风速在非可用范围时,偏航系统按反方向旋转720°,否则,正常运转;等到单方向转动角度积累至1080°时,偏航系统按反方向旋转1080°,这时如果不能及时反转,已处于缠绕状态的电缆将被扭断.为安全起见,风力发电机组中央处理单元一方面要在软件编程和硬件电路设计时分别实现程序互锁和电气互锁,防止出现错误命令.另一方面,除发出控制命令外,要检测偏航电机动作的反馈信号,在有偏航命令却没收到反馈信号时立即采取停机动作,这样就能够实现容错及保护功能,避免不必要的损失.2.3 故障报警风力发电机组的准确对风对于发挥风机的最大性能,提高风能利用率有至关重要的作用.当增量式编码器出现故障不能准确反馈机舱位置时就影响到偏航系统的准确校正,我们用非接触式位置传感器作为机舱的位置冗余控制的参考值,如果非接触时位置传感器与增量式编码器的信号值有差别就要显示故障报警,做出相应处理.另一方面,中央处理器发出偏航命令却没有收到偏航电机动作的反馈信号时,也应该显示故障报警,防止重大事故产生.本系统中报警是通过中央处理单元判断,并通过Profibus 2DP 总线与上位机实现通讯,由WinCC 报警记录编辑器及WinCC 报警控件实现的.系统通过WinCC 中的变量Tag 和S7中的位Bit 对应,对对象的属性进行设置.WinCC 自带控件WinCC Alarm Cont rol ,来实现报警消息的输出与显示,在WinCC 资源管理器中激活报警记录系统,报警事件在画面中显示.3 结束语本系统是我们所做的2MW 风力发电控制系统的一部分,系统采取闭环控制方式实现了风向自动准确校正;通过软件设计和硬件电路设计实现容错处理,防止出现重大事故;同时采用上位机实时监测风机运行情况,实现故障报警,提高了风机运行的安全性能.系统设计成功以后经过了软件测试,并且经过了实际应用,结果表明本系统的闭环控制、冗余设计,报警设计对于提高偏航系统的精准度及安全可靠性有极好的作用.参考文献[1]王文卓,姚兴佳,单光坤.FM350在MW 级风力发电机组偏航控制系统中的应用[J ].电气开关,2006,(5):47248.[2]李小燕,王志新.风力机偏航控制策略及系统设计[J ].微计算机信息,2007,23(5):122.[3]叶杭治编著.风力发电机组的控制技术[M ].北京:机械工业出版社,2008.[4]磨瑞尹,孟 如,姚 征,等.西门子PLC 在布袋除尘系统中的应用[J ].自动化仪表,2005,(26):66270.[5]周美兰.PLC 电气控制与组态设计[M ].北京:科学出版社,2004.[6]王晓远,杜静娟,齐利晓,等.基于工业组态软件WinCC 的化工工业监控系统[J ].化工自动化及仪表,2006,(33):41247.DESIGN OF YAW CONTROL SYSTEM OFMW WIN D 2MILL GENERATORSCHAN G Jie 1,M EN G Yan 2jing 1,ZHU Yu 2guo 1,2,C H EN Hong 2li 1(1.Changxing Wind Power Lab ,Shaanxi University of Science &Technology ,Xi ′an 710021,China ;2.Shan 2dong Changxing Co.Ltd.,Binzhou 256206,China )Abstract :In order to run in a very large wind speed range ,to improve energy efficiency ,playwind power generators performance betterly ,MW wind 2mill generators all using t he yaw・87・第4期常 杰等:MW 级风力发电机组偏航控制系统的设计cont rol.The yaw control system is t he part of t he elect ric control system.The paper pres 2ent s t he f unction of t he yaw cont rol system in mw wind generators and it s st ruct ure ,on t hebasis of t his ,t he paper mainly describes how to realize automatic calibration in t he yaw con 2t rol system ,fault alarm ,and how to prevent major accident happen.This system uses s72300series of plc cont rol system of siemens company as t he control system ,wit h high stability andreliability.t he system ′s every f unction works well ,and t he devices operate steadily since sys 2tem run into operation ,so it has reached t he design requirement compeletely.K ey w ords :wind t urbine generator ;yaw co nt rol system ;automatic calibration ;safety toler 2ance(上接第75页)[4]顾筠筠,李荣玉,邱永亮.TF T 2LCD 的过驱动技术及其发展[J ].现代显示,2008,(07):33240.[5]周富山,高鸿锦,欧阳钟灿.TN/STN L CD 中指向矢分布及电光特性的模拟计算[J ].液晶与显示,1998,(03):25231.[6]Philip Bos.显示器的快速响应液晶效应[J ].现代显示,2008,(04):9214.STU DY ON THE RE LATION OF CE LL GAP TO RESPONSETIME AN D CONTRAST RAIIO OF NBWEI Nan ,ZHAN G Fang 2hui ,J IAN G Qian(School of Electrical and Information Engineering ,Shaanxi University of Science &Technology ,Xi ′an 710021,China )Abstract :The liquid crystal materials MJ 08421(f rom Merck &Co.,Inc )was simulated viat he L CD master to investigate t he relationship of cell gap to response time and co nt rast ratio.Then a quantitative analysis to t he simulation curves was also done in t his paper.The simula 2tion curves showed t hat a superior display performance appeared at t he gap of 3.3μm whencell gap varied f rom 3.2μm to 3.8μm.It was estimated t hat a response time of 5.62ms canbe reached and a cont rast ratio about 1500∶1can be obtained at t he gap of 3.3μm.K ey w ords :response time ;cont rast ratio ;optical simulation省博管办专家组来我校评估博士后科研流动站根据人力资源和社会保障部《关于印发博士后科研流动站和工作站评估办法的通知》(人社部发[2008]115号)和陕西省评估工作实施方案的安排,6月28日,陕西省博士后科研流动站评估专家组一行5人到我校对博士后科研流动进行了实地评估.副校长马建中代表学校主持了评估会议.学科建设办公室主任王秀峰汇报了我校材料科学与工程流动站、轻工技术与工程流动站自2007年8月获批成立以来,在规章制度建设、博士后公寓及工作室建设、博士后人员招收管理等方面工作的情况,流动站各设站学院的主管院长也从学院层面具体介绍了在站博士后的工作情况及今后的发展规划.专家组在听取我校汇报后,针对流动站发展的具体情况及特点,就我校这样的新设站单位今后如何进一步提高博士后培养工作质量、推动博士后事业健康发展提出了许多建设性的意见及工作经验.最后,专家组参观了设站学院展室及博士后人员工作室、实验室.・97・。