大规模场景的消隐技术
基于射线管分裂方法的SAR场景快速消隐技术
基于射线管分裂方法的SAR场景快速消隐技术董纯柱;殷红成;王超【摘要】SAR场景模型常采用非均匀三角网格描述,使得传统的基于Z-Buffer技术的消隐算法难以在保持较高的消隐精度的同时兼顾消隐效率。
该文提出了一种基于射线管分裂方法的 SAR 场景快速消隐技术,将复杂 SAR 场景的消隐问题分解为两个简单过程:一是对场景三角网格在发射平面上的投影点云做2维Delaunay 三角网格划分,二是基于射线管分裂方法对新生网格可见性进行判断和拓扑重构。
典型飞机目标和草地上T-72坦克的消隐结果验证了该方法的准确性和高效性。
% Traditional hidden surface removal algorithm based on hardware Z-Buffer technique cannot give attention to precision or efficiency at the same time when dealing with the non-uniform triangulated SAR (Synthetic Aperture Radar) scene model. A novel high-precision hidden surface removal approach using fast ray-tube splitting algorithm is proposed, where the SAR scene hidden surface removal problem is decomposed into two simple procedures, i.e. a Delaunay triangulator is used to generate the initial ray tubes from the projected point clouds of all incident visible vertices, then an adaptive ray-tube splitting method is adopted to carry out the complex scene shading situations and resultant visible model reconstruction. Simulation results of typical aircraft and T-72 tank show that, the new approach is feasible and effective.【期刊名称】《雷达学报》【年(卷),期】2012(000)004【总页数】5页(P436-440)【关键词】消隐算法;射线管分裂方法;Delaunay三角剖分;Z-Buffer算法;SAR场景【作者】董纯柱;殷红成;王超【作者单位】中国传媒大学信息工程学院北京 100024; 电磁散射重点实验室北京100854;中国传媒大学信息工程学院北京 100024; 电磁散射重点实验室北京100854;电磁散射重点实验室北京 100854【正文语种】中文【中图分类】TN957对基于模板匹配的SAR图像解译而言,SAR图像中特有的透视收缩、叠掩和阴影等几何畸变特性是重要且稳定的识别特征[1]。
消隐算法

一般平面物体的消隐算法(凹多面体)
• 消隐算法可以按以下的步骤实现: • ①包含性检测(边界盒检测法)* • 边界盒:是指包含平面正投影的两对边分别 平行于坐标轴的最小外接矩形,也称为最小 投影矩形。 • 如果空间两平面图形的最小投影矩形没有重 叠部分,则这两个图形相互之间不存在消隐 问题。
一般平面物体的消隐体)
• 关于潜在可见面: • 对于单个凸多面体,它的表面不是全部 可见,就是全部不可见。其棱线的可见 性也只有这两种状况。 • 对于凹多面体则不同,它的棱线除了全 部可见、全部不可见外,还有部分可见、 部分不可见的情况 • 如根据外法线向量与视线向量夹角关系 判断得出的可见边9、10、11、12构成的 平面上,9—10全部可见;10—11全部不 可见,而11—12则部分可见 • 因此对凹多面体上经判断后得出的可见 面只能看作为潜在可见面,它上面的每 一条棱线最终的可见情况,还需作进一 步的判定。
消隐算法
• 利用立体表面外法线的方向可判断物体表 面的可见性,从而对物体作消隐处理,这 种方法对凸多面体的消隐处理特别简单有 效。 • 其它消隐算法 • 有些已被固化到硬件中,但消隐算法至今 还没有很完善地被解决,它仍在吸引人们 在不断地探索,作更深入的研究。 • 这方面的研究围绕着:正确的算法、节省 内存空间及加快运算速度(特别是实时 Real-time的速度)等目标而进行的。
• 由向量N和V的数量积得:
N V N V cosθ N V cosθ N V
, 其正、负号与N V一致
(5)表面可见性判断
• 显然表面可见性取决于表 面外法线向量N与视线向 量V之间的夹角θ • 若为0°≤θ≤90°,则该表面 可见 • 若为90°<θ≤180°,则该 表面不可见 • 可得表面可见性判断依据 为: N V N V cosθ • 若N·V≥0,则该表面可见 • 若N· V<0,则该表面不可见 N V cosθ N V
浅谈虚拟现实技术的研究现状及发展趋势

浅谈虚拟现实技术的研究现状及发展趋势1、虚拟现实技术及其特征虚拟现实是一种由计算机和电子技术创造的新世界,是一个看似真实的模拟环境,通过多种传感设备,用户可根据自身的感觉,使用人的自然技能对虚拟世界中的物体进行考察和操作,参与其中的事件,同时提供视、听、触等直观而又自然的实时感知,并使参与者“沉浸”于模拟环境中。
虚拟现实技术(VR)主要包括模拟环境、感知、自然技能和传感设备等方面。
模拟环境是由计算机生成的、实时动态的三维立体逼真图像。
感知是指理想的VR应该具有一切人所具有的感知。
除计算机图形技术所生成的视觉感知外,还有听觉、触觉、力觉、运动等感知,甚至还包括嗅觉和味觉等,也称为多感知。
自然技能是指人的头部转动,眼睛、手势、或其他人体行为动作,由计算机来处理与参与者的动作相适应的数据,并对用户的输入做出实时响应,并分别反馈到用户的五官。
传感设备是指三维交互设备。
常用的有立体头盔、数据手套、三维鼠标、数据衣等穿戴于用户身上的装置和设置于现实环境中的传感装置,如摄像机、地板压力传感器等。
VR具有以下四个重要特征:①多感知性。
指除一般计算机所具有的视觉感知外,还有听觉感知、触觉感知、运动感知,甚至还包括味觉、嗅觉、感知等。
理想的虚拟现实应该具有一切人所具有的感知功能。
②存在感。
指用户感到作为主角存在于模拟环境中的真实程度。
理想的模拟环境应该达到使用户难辨真假的程度。
③交互性。
指用户对模拟环境内物体的可操作程度和从环境得到反馈的自然程度。
④自主性。
指虚拟环境中的物体依据现实世界物理运动定律动作的程度。
虚拟现实的关键技术主要包括:动态环境建模技术、实时三维图形生成技术、立体显示和传感器技术、应用系统开发工具、系统集成技术。
2、国外虚拟现实技术的研究现状2.1 美国美国是VR技术的发源地。
美国VR研究技术的水平基本上就代表国际VR发展的水平。
目前美国在该领域的基础研究主要集中在感知、用户界面、后台软件和硬件四个方面。
地面车辆目标高质量SAR图像快速仿真方法

地面车辆目标高质量SAR图像快速仿真方法董纯柱;胡利平;朱国庆;殷红成【摘要】Aiming at meeting the requirement of the amass high-quality SAR images needed by template-based ground target recognition engineering practice, a novel efficient SAR signal level simulation method is proposed. The electromagnetic scattering interaction mechanisms including coherent clutter of ground, multiple reflection and edge diffraction of vehicle, coupling-scattering between vehicle and ground are accurately estimated by utilizing an efficient ray-tracing technique. High quality SAR images are finally created through the SAR imaging procedure. Simulation results show that, the new method is feasible and effective.%为满足基于模板的SAR地面车辆目标识别对海量高质量模板图像的工程应用需求,该文提出了一种基于射线追踪技术的SAR信号级高效仿真方法。
该方法通过构建地面车辆目标SAR仿真场景物理模型并利用射线追踪方法准确模拟SAR探测过程中电磁波与场景中目标与环境的作用机理,实现对地面环境的宽带相干杂波、表面粗糙的复杂目标的宽带电磁散射以及地面-目标间耦合散射的快速计算,并通过SAR成像处理和图像相似度评估确认形成高质量SAR模板图像。
kantorovich距离的场景削减方法
kantorovich距离的场景削减方法Kantorovich距离,也称为Wasserstein距离,是一种衡量两个概率分布之间差异的度量指标。
它更加灵活和全面地比较两个分布的相似性,可以用于各种场景中,包括图像处理、自然语言处理、运筹学和经济学等。
Kantorovich距离的计算非常复杂,特别是在高维和大规模数据集上。
为了解决这个问题,研究者们提出了一些场景削减方法,以降低计算的复杂性。
一种常用的场景削减方法是分层削减(layered reduction)。
分层削减将问题分解为多个层次,每个层次中的场景规模都比前一个层次小。
首先,我们可以对输入分布进行分组,将相似的场景放在一组。
然后,对于每个组,我们计算其组内的Kantorovich距离,这样可以将问题的规模缩小到每个组内的场景数量。
最后,我们通过计算不同组之间的Kantorovich距离,得到最终的结果。
这种方法可以大幅减少计算量,但可能会引入一定的误差。
另一种常见的场景削减方法是采样削减(sampling reduction)。
采样削减通过从每个分布中随机采样一小部分场景,然后计算这些采样场景之间的Kantorovich距离,从而得到近似的距离。
这种方法通过减少要计算的场景数量,来降低计算复杂性,但存在采样误差的风险。
除了分层削减和采样削减,还有一些其他的场景削减方法。
例如,在一些特殊情况下,可以使用凸包削减(conve某 hull reduction),它将每个分布用凸包来代替,从而降低计算复杂性。
还有一些启发式方法,如迭代削减法(iterative reduction),它通过多次迭代计算,逐渐降低问题的规模。
需要注意的是,场景削减方法虽然可以减少计算复杂性,但可能会引入一定的误差。
因此,在实际应用中,我们需要根据具体的场景和需求来选择合适的削减方法,并权衡计算复杂性和精度之间的平衡。
总的来说,Kantorovich距离的场景削减方法是一种有效的技术,可以帮助我们在处理大规模和高维数据时,降低计算复杂性。
图像空间消隐:z缓冲器(z-buffer)算法
计算该像素(x, y)的光亮值属性并写入帧缓冲器 更新z缓冲器 zbuffer(x, y)=z(x, y)
5
z缓冲器的其它应用
阴影算法:以光源为 视点的z缓冲器
6
z缓冲器的其它应用
rgb和z缓冲器相结合,实现图像的合成
7
z缓冲器算法分析
优点
算法复杂度(O(nN)):对于给定的图像空间,N是固定的,所 以算法复杂度只会随着场景的复杂度线性地增加
无须排序:场景中的物体是按任意顺序写入帧缓冲器和z缓冲 器的,无须对物体进行排序,从而节省了排序的时间
适合于任何几何物体:能够计算与直线交点 适合于并行实现(硬件加速)算法
z (深度)缓冲器算法属于图像空间算法 z缓冲器是帧缓冲器的推广
帧缓冲器:存储的是像素的颜色属性 z缓冲器:存储的是对应像素的z值
假设在视点坐标系(oxyz)中,投影平面为z=0,视线方向沿(-z)轴方向, 投影为平行投影
深度值就是物体沿着视线(-z)方向、与视点的距离 离视点近的物体遮挡离视点远的物体:z值越大,离视点越近
2
z缓冲器算法
投影变换示意图
3
颜色与深度缓冲举例
颜色缓冲
深度缓冲
4
z缓冲器算法描述
(1) 帧缓冲器中的颜色置为背景颜色 (2) z缓冲器中的z值置成最小值(离视点最远) (3) 以任意顺序扫描各多边形
a) 对于多边形中的每一像素,计算其深度值z(x,y) b) 比较z(x, y)与z缓冲器中已有的值zbuffer(x,y)
不足
z缓冲器需要占用大量的存储单元
一个大规模复杂场景中:深度范围可能为106,一个 像素需要24bit来存储其深度信息。如果显示分辨率 为1280×1024,那么深度缓冲器需要4MB存储空间
虚拟与现实复习重点
题型:填空、单选、简答第一章虚拟现实技术概述1.虚拟现实的概念:集成了计算机图形学、计算机仿真技术、人工智能、传感技术、显示技术和网络并行处理技术等领域的最新发展成果,把客观上存在的或并不存在的东西,运用计算机技术,在用户眼前生成一个虚拟的环境。
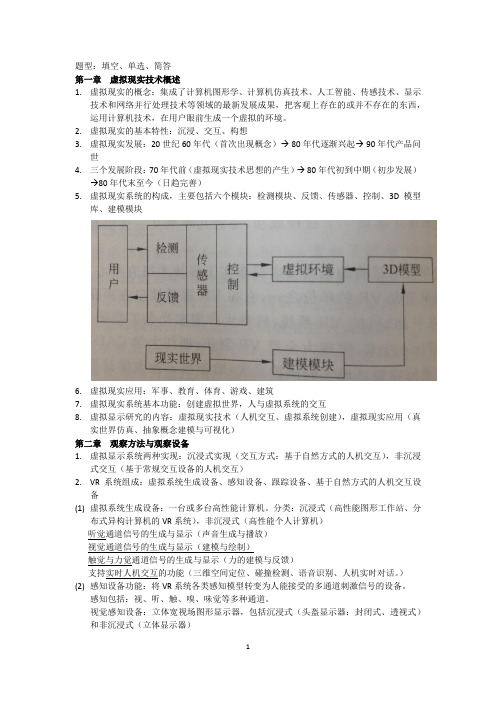
2.虚拟现实的基本特性:沉浸、交互、构想3.虚拟现实发展:20世纪60年代(首次出现概念)→ 80年代逐渐兴起→ 90年代产品问世4.三个发展阶段:70年代前(虚拟现实技术思想的产生)→ 80年代初到中期(初步发展)→80年代末至今(日趋完善)5.虚拟现实系统的构成,主要包括六个模块:检测模块、反馈、传感器、控制、3D模型库、建模模块6.虚拟现实应用:军事、教育、体育、游戏、建筑7.虚拟现实系统基本功能:创建虚拟世界,人与虚拟系统的交互8.虚拟显示研究的内容:虚拟现实技术(人机交互、虚拟系统创建),虚拟现实应用(真实世界仿真、抽象概念建模与可视化)第二章观察方法与观察设备1.虚拟显示系统两种实现:沉浸式实现(交互方式:基于自然方式的人机交互),非沉浸式交互(基于常规交互设备的人机交互)2.VR系统组成:虚拟系统生成设备、感知设备、跟踪设备、基于自然方式的人机交互设备(1)虚拟系统生成设备:一台或多台高性能计算机。
分类:沉浸式(高性能图形工作站、分布式异构计算机的VR系统),非沉浸式(高性能个人计算机)听觉通道信号的生成与显示(声音生成与播放)视觉通道信号的生成与显示(建模与绘制)触觉与力觉通道信号的生成与显示(力的建模与反馈)支持实时人机交互的功能(三维空间定位、碰撞检测、语音识别、人机实时对话。
)(2)感知设备功能:将VR系统各类感知模型转变为人能接受的多通道刺激信号的设备。
感知包括:视、听、触、嗅、味觉等多种通道。
视觉感知设备:立体宽视场图形显示器,包括沉浸式(头盔显示器:封闭式、透视式)和非沉浸式(立体显示器)(3)跟踪设备功能:跟踪并监测位置和方位的设备。
图像处理技术中的摄影图像去雾方法比较
图像处理技术中的摄影图像去雾方法比较摄影图像去雾是图像处理技术领域中一个重要的任务,它能够帮助摄影师和观众恢复雾霾天气下的清晰景色。
在过去的几十年里,研究者们提出了各种各样的去雾方法,每一种方法都有其优点和局限性。
本文将比较几种常见的摄影图像去雾方法,以便读者能够更好地了解它们之间的不同和适用场景。
第一种方法是物理模型方法。
这种方法基于光学物理模型,通过对雾霾传播过程进行建模来去除雾霾。
最著名的物理模型方法是单色模型和多色模型。
单色模型假设光在传播过程中只受到散射的影响,而多色模型则考虑了光的波长对传播的影响。
物理模型方法的优点是可以恢复真实的场景信息,但是它们需要事先获取雾霾传播参数,这对于实际应用来说可能是困难的。
第二种方法是暗通道先验方法。
这种方法是由He等人于2009年提出的,它假设在大部分非雾区域中,至少存在一个颜色通道的像素值很低。
暗通道先验方法通过寻找图像中的暗通道来估计雾霾浓度和光照分布,并根据这些估计结果去除雾霾。
相较于物理模型方法,暗通道先验方法不需要先验知识,并且在去雾效果方面表现出色。
然而,它在存在颜色较为接近的区域或者带有大片遮挡物的图像上效果可能不理想。
第三种方法是基于图像边缘的方法。
这种方法通过检测图像中的边缘信息来去除雾霾。
常见的边缘检测算法包括Sobel算子、Canny算子等。
基于图像边缘的方法对于恢复细节信息和保持图像清晰度方面表现出色,但是它可能会对图像中的纹理信息产生失真。
第四种方法是导向滤波方法。
导向滤波方法将去雾问题转化为图像的低频部分估计问题。
它通过引入一个导向图像(通常是原始图像的亮度分量)来引导滤波器的行为。
导向滤波方法在去除雾霾的同时能够保持图像的细节信息,但是在对比度较低的图像上可能存在一定的局限性。
综上所述,不同的摄影图像去雾方法在适用场景和效果方面存在差异。
物理模型方法适用于事先获取雾霾传播参数的场景,可以恢复真实的场景信息;暗通道先验方法不需要事先获取参数,并且在去雾效果方面表现出色,但在特殊情况下可能效果不理想;基于图像边缘的方法对于保持图像清晰度和恢复细节信息很有效,但对纹理信息可能产生失真;导向滤波方法能够保持细节信息,但在对比度较低的图像上可能存在局限性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
大规模场景的消隐技术
王章野;陆艳青;彭群生
【期刊名称】《计算机工程与应用》
【年(卷),期】2001(037)009
【摘要】It becomes more important to process the data of large-scale scene due to the rapid development of computer graphics. This paper mainly discusses several up-to-date visibility algorithms developed in recent years.%计算机图形学的快速发展使处理大规模场景中的数据变得日益重要,文章主要讨论了近几年最新发展的消隐算法。
【总页数】6页(P8-12,54)
【作者】王章野;陆艳青;彭群生
【作者单位】浙江大学温州师范学院;浙江大学;浙江大学
【正文语种】中文
【中图分类】TP301.6
【相关文献】
1.基于射线管分裂方法的SAR场景快速消隐技术 [J], 董纯柱;殷红成;王超
2.大规模MIMO异构网场景下的空间消隐干扰协调方案 [J], 龙恳;王维维;郑寒冰
3.基于时空连贯性和几何简化技术的复杂场景快速消隐绘制算法 [J], 郑文庭;鲍虎军;彭群生
4.大规模MIMO-FBMC系统下的空间消隐方法 [J], 王家南;周小平;李莉;向浩凯;
王斌
5.基于Z-buffer算法优化的大型变电站场景模型快速线消隐方法 [J], 罗国亮;王睿;吴昊;赵昕;黄晓生;曹义亲;廖成慧
因版权原因,仅展示原文概要,查看原文内容请购买。