液压挖掘机总图-A0
TY220型推土机工作装置液压系统

TY220型推土机工作装置液压系统
1-推土铲提升缸,2-推土铲倾斜缸,3-快回阀,
4- 工作泵,
5- 转向泵,
6- 滤网,
7- 滤油器,
8- 粗滤器,
9- 过载阀,
10、11-补油阀,12-松土器阀,
13-铲刀倾斜阀,14-铲刀提升阀,15、16-补油阀,17-安全阀,
18- 滤油器,
19- 松土器伺服阀,20-倾斜缸伺服阀,21-推土铲伺服阀,23-松土器油缸24、26-进口单向阀,25-进口单向流量阀,27-后桥箱,
28-工作油箱,29-粗滤器
图TY220型推土机工作装置液压系统
1-推土铲提升缸,2-推土铲倾斜缸,3-快回阀,
4- 工作泵,
5- 转向泵,
6- 滤网,
7- 滤油器,
8- 粗滤器,
9- 过载阀,
10、11-补油阀,12-松土器阀,
13-铲刀倾斜阀,14-铲刀提升阀,15、16-补油阀,17-安全阀,
18- 滤油器,
19- 松土器伺服阀,20-倾斜缸伺服阀,21-推土铲伺服阀,23-松土器油缸24、26-进口单向阀,25-进口单向流量阀,27-后桥箱,
28- 工作油箱,
29- 粗滤器
图TY220型推土机工作装置液压系统结构简图。
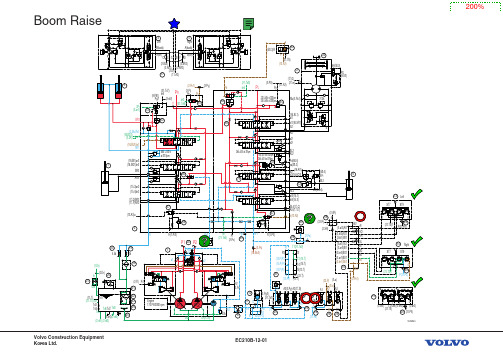
沃尔沃大挖液压图
Right A(back) D B(for) (58-3)Pi P
A
33
T
32
(2-BL4) (2-BR3) (2-AL4) (2-AR3) (3-Dr) 17 (11-A3)
5
(31-T6) (12-A2)
3
SH(58-2) PG (9-S2) Dr
(21-Td8) (21-Td7) (9-PS1) dr4 (2-dr2) Pg2 3Pi (2-ar1) BR1 Y
P2
1 (2-Ps) (16-Bu2) P2 (14-P)P3 (15-P) P4 (13-P)P5
31
14
4.5k
3k
18
Psv a4 a1 a2
P1
T1(21-Td2)
Right ST9
(1-Dr) In
27
3 2
4
29
(3-Dr)
26
(2-Fl) Pi1 Out T
21 22 23 24 25
(2-b) A2 A3
15
(11-T) Td1 (31-T1)Td2 Td3 Td6 Td7 Td8 Td4 Td5 (2-dr4)(2-dr5) (2-dr1) (2-dr3)
a3 Engine 170 PS/2000 rpm
P1
B3
P2
Dr(27-in)
P3
9
P2
A3 40k
8
PS S1
2 (2-bl4) P2
T6 (33-T) P6 (12-P1) (12-T) A2(2-Py) A3(17-B)
11 12
P(31-P3)
Pi2 (2-Fr)
10
(33-P) (2-a) A1 (31-T6) T 29 P1
XG804反铲液压挖掘机三维建模
太原科技大学本科毕业设计XG804履带式液压挖掘机三维建模XG804 tracked excavator 3D modeling学院(系):机械工程专业:机械设计制造及其自动化(工机)学生姓名:武慧杰学号:201012030418指导教师:李捷评阅教师:完成日期:太原科技大学Taiyuan University of Science and Technology太原科技大学毕业设计(论文)任务书学院(直属系):机械工程学院时间: 14年 6月 10日摘要挖掘机械是工程机械的一种类型,是土石方开挖的主要机械设备,单斗液压挖掘机是一种采用液压传动并以铲斗进行挖掘作业的机械,液压挖掘机的工作装置常用的有反铲,正铲,装载,抓斗和起重装置。
本次设计主要是设计XG804履带式液压挖掘机整机的三维建模。
主要对工作装置机构的几何参数进行设计,通过对实物机型进行测绘,然后基于Pro-e、AutoCAD等工程绘图软件对挖掘机各零部件进行绘图、三维建模、整机装配等,对挖掘机进行运动分析,挖掘机各种工作状态以三维图的方式进行教学演示等。
在设计中应注意工作装置设计原则,在各部件满足实物要求的条件下实现各零部件无干涉有效装配,完成各工况下运动拟合演示等功能。
关键字:挖掘机,三维建模,Pro-e,运动分析,教学演示XG804 tracked excavator 3D modelingAbstractShovel machinery is a major type of construction Machinery, which is major earth excavation equipment. Single Bucket Hydraulic shovel is a mechanical which reliance on hydraulic transmission with the bucket to carry out excavation work. Hydraulic shovel working device are commonly backhoe, hoe, loading, grab and lifting gear.This design is mainly 3D modeling design of XG804 hydraulic crawler excavator. Geometric parameters on the working mechanism of the main design, through the mapping of physical models, and then the Pro-e, AutoCAD and other engineering drawing software based on excavator parts for drawing, three-dimensional modeling, assembly, motion analysis was carried out on the excavator, excavator to various working states of three-dimensional map of the ways of teaching demo.In the design should pay attention to the working device design principle, meet the real requirements under the conditions of the parts without interference in effective assembly components, completed under the condition of motion fitting demonstration function.Keyword:Excavator;3D modeling;Pro-e;Motion analysis;Teaching demonstration目录任务书 (I)摘要.............................................. 错误!未定义书签。
日立挖机330-3G液压图

开关
左行走
右行走 前进 倒退
左推进
铲斗卷入 铲斗翻出
铲斗
动臂 动臂下降 动臂起升 动臂起升 主动臂 动臂下降
铲斗油缸 主斗杆 斗杆伸出
斗杆收回
斗杆伸出
斗杆
动臂油缸 斗杆油缸 回转 右侧泵控制阀
开关 开关
溢流压力
回转马达
斗杆
行走速度 阀电磁线圈
输入
输出
先导过滤器
传感器组
左泵
右泵 至油箱壁
油箱
泵电磁线圈 主泵
泵
泵
附于分册号:TTBWA-C-00
ZX330-3G 液压油路图
减振阀 铲斗 卷入 开关 开关 开关 铲斗卷入 翻出 铲斗翻出 动臂起升 起升 动臂起升
注:请参考技术手册中的“性能标准”表以获得溢流阀压力设定值。
下降 动臂 斗杆 伸出
动臂下降Biblioteka 斗杆伸出收回斗杆收回 斗杆收回
左
右 回转 右推进
开关
左侧泵控制阀
液压挖掘机ppt课件

液压系统原理图
主泵: K3V112DT柱塞式串联变量双泵.
• 最大排量112ml/r,该泵按总功率恒定进行变量、总功 率按4段进行控制、高压切断、中位负流量控制
主泵原理图
• 主操作阀采用川崎KMX15R/B450,最大 流量270L/min,能实现动臂提升合流、 斗杆大小腔合流、斗杆再生回路、行走 直线、动臂提升优先、回转优先、斗杆 闭锁等功能。
位闭心
挖掘机作业过程
• 挖掘机一个作业循环包括以下动作: 1. 挖掘 通过回转铲斗、回转斗杆以及它们的复合动作,实现铲斗
的破土、装土。 2. 满斗回转 铲斗装满土后,动臂提升、同时进行平台回转到卸土
位置; 3. 卸土 平台回转到位后制动,由斗杆调节卸土半径,铲斗翻转卸
土 4. 回位 铲斗卸土,转台反转,动臂、斗杆配合,回到挖掘位置
1。回转平台:由回转平台、液压传动装置、伺服 操纵装置、动力装置、司机室、空调系统、电器系 统等组成。
2。工作装置由动臂、斗杆、铲斗、联杆、摇杆、 油缸等组成。
3。行走装置由车架、支重轮、托链轮、导向轮、
张紧装置、履带、行走机构、回转接头等组成。
液压系统的组成
挖掘机液压系统的基本概念: 液压系统的组成:动力元件、控制元件、执行元件、辅件 定量系统、变量系统 开式系统、闭式系统 恒功率系统 双泵双回路系统、总功率调节、分功率调节、中位、中位开心、中
先导系统液压原理图
先导系统
先导泵
先导泵
电磁阀组
伺服手先导阀采用川崎TH40K1269~70
目前川崎系统采用的是双泵双回路恒功率控制液压系统,带四种功 率控制模式、中位负流量控制,两液压主泵按全功率变量。 小松林德系统采用的是负荷传感系统
全功率变量是指两泵功率之和保持恒定,这主要是当 执行单泵动作时,此泵可吸收另一不工作的液压泵功率, 充分发挥柴油机功率。
毕业设计--液压挖掘机底盘设计(含图纸)
目录摘要 (IV)Abstract (V)前言 (VI)第一章绪论 ........................................... 错误!未定义书签。
1.1 液压挖掘机在现代化建设中的作用.............. 错误!未定义书签。
1.2 液压挖掘机的工作特点和基本类型 (1)1.2.1 液压挖掘机的主要优缺点 (1)1.2.2 液压挖掘机的基本类型及主要特点 ............ 错误!未定义书签。
1.3 国内外液压挖掘机研究现状及发展趋势 (4)1.3.1 研究现状 (4)1.3.2 发展趋势 .................................. 错误!未定义书签。
1.4 课题设计的目的和意义 (5)1.5 本设计所要完成的主要任务 (5)第二章总体方案设计 .................................... 错误!未定义书签。
2.1 履带式液压挖掘机的组成...................... 错误!未定义书签。
2.2 设计依据 (7)2.2.1 履带式行走装置的主要特点 (7)2.2.2 设计参数 .................................. 错误!未定义书签。
2.3 总体设计原则................................ 错误!未定义书签。
2.4 动力装置的比较与选型 (8)2.5 工作装置的比较与选择 (9)2.5.1 反铲工作装置 .............................. 错误!未定义书签。
2.5.2 正铲工作装置 .............................. 错误!未定义书签。
2.6 回转机构的选择.............................. 错误!未定义书签。
2.7 传动方式的比较与选择........................ 错误!未定义书签。
日立挖掘机ZX200-270液压图

SL SH 1 SK BV
伸出
左 T T5 P P2 2F SN SA SG SL SN D L 12 2 4 J I 左行走 12 右后退 PH 3 A4 T4 B7 P A7 13 备用 B 备用 7 铲斗挖掘 14 备用
连通阀
左后退
B C SP SM SK
2 3
2 3 DT SI
右 回转 右行走 1 4 斗杆收回
右后退 右前进
T3
4
350bar~370bar
K TR 10 9 9 左前进 B8 A8
11
P1
T P DF PI
右行走 10 左后退
左前进
11 右前进
B1 A1 DK
左行走
T3 T1 T2
A1 A2 A3 A5 SY DY PI1
8 铲斗卸料
铲斗
400bar 380bar
B2 A2 动臂2 2 动臂下降 动臂1 1 动臂提升 铲斗油缸
行走速度 T1
A9
DC DH
T2
5.0bar
ZAXIS200/210LC/230/240LC/270 液压系统图
DE DS PD 电磁阀组
PD2
HP1
PD1
HP1
PA 6BG1-TC 140PS @1900rpm HP 150PS @2100rpm
1.5bar
DT DB PA
DG SM DF DS DC DP
3.0bar 1.0bar
PE PF
泵流量 泵扭矩
PG PC PDSB SFra bibliotek PC1 PC2
TA TA
WCLA-395-ZX
N
14 SM
M
13
挖掘机液压系统图

挖掘机液压系统图一.液压挖掘机液压系统的基本类型液压挖掘机液压系统大致上有定量系统、变量系统和定量、变量复合系统等三种类型。
1.定量系统在液压挖掘机采用的定量系统中,其流量不变,即流量不随外载荷而变化,通常依靠节流来调节速度。
根据定量系统中油泵和回路的数量及组合形式,分为单泵单回路定量系统、双泵单回路定量系统、双泵双回路定量系统及多泵多回路定量系统等。
2.变量系统在液压挖掘机采用的变量系统中,是通过容积变量来实现无级调速的,其调速方式有三种:变量泵-定量马达调速、定量泵-变量马达调速和变量泵-变量马达调速。
单斗液压挖掘机的变量系统多采用变量泵-定量马达的组合方式实现无极变量,且都是双泵双回路。
根据两个回路的变量有无关连,分为功率变量系统和全功率变量系统两种。
其中的分功率变量系统的每个油泵各有一个功率调节机构,油泵的流量变化只受自身所在回路压力变化的影响,与另一回路的压力变化无关,即两个回路的油泵各自独立地进行恒功率调节变量,两个油泵各自拥有一半发动机输出功率;全功率变量系统中的两个油泵由一个总功率调节机构进行平衡调节,使两个油泵的摆角始终相同。
同步变量、流量相等。
决定流量变化的是系统的总压力,两个油泵的功率在变量范围内是不相同的。
其调节机构有机械联动式和液压联动式两种形式。
二.YW-100型单斗液压挖掘机液压系统国产YW-100型履带式单斗液压挖掘机的工作装置、行走机构、回转装置等均采用液压驱动,其液压系统如图1所示。
该挖掘机液压系统采用双泵双向回路定量系统,由两个独立的回路组成。
所用的油泵1为双联泵,分为A、B两泵。
八联多路换向阀分为两组,每组中的四联换向阀组为串联油路。
油泵A输的压力进入第一组多路换向阀,驱动回转马达、铲斗油缸、辅助油缸,并经中央回转接头驱动右行走马达7。
该组执行元件不工作时油泵A输出的压力油经第一组多路换向阀中的合流阀进入第二组多路换向阀,以加快动臂或斗杆的工作速度。
油泵B输出的压力油进入第二组多路换向阀,驱动动臂油缸、斗杆油缸,并经中央回转接头驱动左行走马达8和推土板油缸6。