脑机接口在机器人控制中的应用研究现状
脑机接口研究报告

脑机接口研究报告随着科技的不断进步,人工智能、虚拟现实等技术已经成为了人们生活中不可或缺的一部分。
而在这些技术中,脑机接口技术无疑是最为引人注目的一种。
脑机接口技术可以将人脑和计算机联系在一起,实现人机交互,并在医学、军事、娱乐等领域中发挥重要作用。
本文将对脑机接口技术的研究现状、应用领域以及未来发展进行探讨。
一、脑机接口技术的研究现状脑机接口技术是一种基于人脑信号的计算机控制技术,它可以实现人脑和计算机的直接交互,不需要通过人体的其他器官来实现。
目前,脑机接口技术的研究主要集中在以下几个方面:1. 脑电信号的采集和处理脑机接口技术需要采集人脑的信号,然后将信号转化为计算机可以识别的数字信号。
目前,脑电信号是最为常用的一种信号。
脑电信号是通过头皮上的电极来采集的,然后通过信号放大器和滤波器进行处理,最终得到数字化的脑电信号。
2. 人脑活动的解码和识别采集到的脑电信号需要进行解码和识别,以便计算机可以理解和处理。
目前,主要的识别方法包括事件相关电位(ERP)和脑机接口(BCI)。
ERP是一种通过分析脑电信号中的特定事件来识别人脑活动的方法,而BCI则是一种通过分析脑电信号中的特定模式来识别人脑活动的方法。
3. 脑机接口技术的应用目前,脑机接口技术已经在医学、军事、娱乐等领域中得到了广泛的应用。
其中,医学领域是脑机接口技术最为重要的应用领域之一。
脑机接口技术可以帮助残疾人士恢复运动能力,帮助失语症患者恢复语言能力,还可以帮助癫痫病患者减少发作次数。
此外,脑机接口技术还可以用于军事领域,帮助士兵完成复杂任务。
在娱乐领域,脑机接口技术可以用于游戏控制,提高游戏体验。
二、脑机接口技术的应用领域1. 医学领域脑机接口技术在医学领域中的应用非常广泛。
目前,脑机接口技术已经被用于帮助残疾人士恢复运动能力。
通过将脑机接口技术与外骨骼设备相结合,残疾人士可以通过控制外骨骼设备来恢复运动能力。
此外,脑机接口技术还可以帮助失语症患者恢复语言能力。
脑机接口技术在机器人技术中的应用

脑机接口技术在机器人技术中的应用脑机接口技术是一种现代化的生物医学技术,将人脑中产生的电信号通过电极设备捕捉并解码后,再转化为机器能理解和处理的数字形式,使人与机器之间的交互得以实现,实现了人类智慧的更高度发展。
这种技术的应用正在日益扩大,已经走向了机器人技术的领域,使得人们对机器人技术的发展前景产生了无限的想象和憧憬。
人们一直认为,虽然机器人一直被誉为是现代生活中最重要的机械装置,但是它们仍然存在着一些限制,比如说,它们只能依靠事先设置好的程序运行,在在真实的环境中,它们往往无法进行适应性的调整和自我学习,这极大地限制了机器人技术的发展规模。
但是现在,随着脑机接口技术的运用,这些问题都得到了完美的解决。
这种技术可以使人脑与机器人交流,实现更为智能化的机器人交互,甚至是人机共同学习、自我调整和优化等多样化功能,让机器人在真正意义上实现智能化,更好地适应各种应用环境。
在具体应用方面,脑机接口技术可以促进机器人与人类之间的密切互动,比如可以通过人类的思维快捷地操纵机器人的动作完成各种各样的任务。
比如,在完成一项简单操作时,只需要通过提高自己的意念或者在自己的脑电波发生了变化时,机器人就能根据预先设定的模式进行自动调整,并完成对应的任务。
这为机器人技术的应用进一步拓展了较大的空间,同时也大大提高了其使用效率,为节约人力和物力资源带来了便利。
不难发现,自动驾驶汽车中的技术已经发展到了没有驾驶员的阶段,使得汽车能够依据自己的意愿、环境变化和乘客的需要在公路上自行行驶。
而这种自主性仅仅是经过预设程序的结果,其应用继续面对的问题是自主意识和响应对人类行为的模仿行为。
而脑机接口技术进一步发展,则可以解决这个问题。
脑机接口技术不仅能够接收人类的思维信号,还能够将其与人体伺服系统互动,避免极端情况下不可预见的意外发生,从而保障了自动驾驶技术的可靠性和安全性。
与此同时,在其它的机器人应用领域中,脑机接口技术同样发挥着巨大的作用。
脑机接口技术在机器人领域中的应用

脑机接口技术在机器人领域中的应用近年来,随着科技的不断进步和发展,新的技术层出不穷,其中脑机接口技术是一项备受关注的前沿技术。
脑机接口技术(Brain-Machine Interface,BMI)即通过直接读取大脑活动信号,将人脑活动与外界环境进行交互。
它用于机器人领域中的应用,有望实现人与机器人的直接沟通,彻底消除中间环节,提高机器人的智能水平和交互能力。
那么,脑机接口技术在机器人领域中的应用究竟有哪些方面呢?一、脑机接口技术在机器人控制中的应用脑机接口技术可用于机器人的控制。
脑机接口技术通过识别脑电信号、脑磁信号和脑血氧信号等,实现对机器人的远程控制。
这项技术的应用可以使机器人具有更强的自主控制和决策能力,同时减少人工干预,提高生产效率。
二、脑机接口技术在机器人学习中的应用脑机接口技术可以帮助机器人学习行为规律。
传统机器学习方法需要人工设定学习目标和策略,并为机器人提供海量数据。
而脑机接口技术可以从人脑中获取信息,帮助机器人快速学习行为规律和策略。
这样,机器人在执行任务时可以更快速、更准确地做出反应,提高学习效率和精度。
三、脑机接口技术在机器人治疗中的应用脑机接口技术可以帮助机器人进行治疗工作。
例如,在神经康复领域,脑机接口技术可以通过读取患者的脑电信号,为他们提供个性化、精准的康复治疗。
这种方法可以大幅提高康复效率和治疗效果,同时将负担减少到最小化。
四、脑机接口技术在机器人交互中的应用脑机接口技术可以帮助机器人与人类更自然地交互。
在机器人和人类的互动过程中,往往需要一些中间介质,这些中间介质不仅影响双方交流的真实度和顺畅度,还使交流过程变得繁琐且受限。
而脑机接口技术可以减少中间介质,通过直接读取人脑信号来实现人机之间的交互。
这样,机器人可以更好地感知人类意图,促进双方交流与合作。
五、脑机接口技术在机器人安全中的应用脑机接口技术可以使机器人更安全地工作。
在危险环境中,机器人的安全保障是非常重要的。
脑机接口技术在人机交互中的应用前景
脑机接口技术在人机交互中的应用前景摘要脑机接口技术是一种创新的技术,将人类大脑与计算机等外部设备相连接,实现人机交互的新方式。
本文将重点探讨脑机接口技术在人机交互中的应用前景。
首先介绍了脑机接口技术的基本原理和分类,然后详细阐述了它在医疗领域、教育领域和娱乐领域等方面的应用,最后指出了脑机接口技术在未来的发展前景。
1. 引言脑机接口技术是利用电生理信号或其他生物信号与计算机等外部设备进行交互的一种技术。
它以神经科学和工程学为基础,通过解读脑电图(EEG)信号、功能磁共振成像(fMRI)等生物信号,将人类大脑与计算机等外部设备相连接,实现人机之间的直接交流。
脑机接口技术的出现为人类与机器之间的交互方式带来了革命性的变化,极大地拓展了人类的感知和控制能力。
2. 脑机接口技术的基本原理和分类脑机接口技术的基本原理是通过获取脑电图(EEG)信号或其他生物信号,经过特定的信号处理和特征提取算法,最终转化成计算机可以理解和处理的指令。
根据获取信号的方式不同,脑机接口技术可以分为非侵入式和侵入式两类。
非侵入式脑机接口技术主要通过头皮上的电极采集脑电图信号,具有无创、安全性高的优点。
侵入式脑机接口技术需要将电极植入到大脑中,可以更准确地获取与神经活动相关的信号,但具有侵入性和风险较高的特点。
3. 脑机接口技术在医疗领域的应用脑机接口技术在医疗领域的应用前景广阔。
首先,脑机接口技术可以帮助瘫痪患者恢复运动功能。
瘫痪患者通常由于神经受损而失去了四肢的运动功能,利用脑机接口技术,可以通过解读患者的脑电图信号,将其转化为机器指令来控制外部假肢,实现一定程度的运动恢复。
其次,脑机接口技术还可以应用于治疗焦虑症等精神疾病。
通过监测患者的脑电图信号,可以及时发现并干预焦虑症患者的不良情绪,从而改善其生活质量。
4. 脑机接口技术在教育领域的应用脑机接口技术在教育领域的应用前景巨大。
首先,脑机接口技术可以帮助自闭症儿童学习和社交。
脑机接口技术的应用与前景

脑机接口技术的应用与前景未来的科技世界中,脑机接口技术(Brain-Computer Interface,BCI)将变得越来越普遍。
人与机器的交互、调控和控制方式正在从机械的按键、触屏、语音识别等传统方式向脑机接口技术转变。
在这篇文章中,我们将探讨脑机接口技术的应用与前景。
一、脑机接口技术的定义与原理脑机接口技术是一种新型的通信方式,它建立在人类大脑神经元活动的基础上,通过将大脑电波信号转换为数字信号,控制外围设备。
脑机接口技术最初的研究目的是为了帮助瘫痪或者运动障碍患者,通过大脑电波信号控制外围医疗设备,比如人工肢体、康复训练设备等等。
随着技术的不断发展,脑机接口技术的应用范围也越来越广泛,比如游戏、娱乐、家庭助手、智能家居等等。
二、脑机接口技术的发展历程脑机接口技术的发展可以追溯到上世纪七十年代。
当时研究人员发现,人们对特定事物的思考和感受会影响大脑电波信号,这一发现为脑机接口技术的研究打下了基础。
进入二十一世纪以后,随着神经科学和计算机科学的蓬勃发展,一些功能强大、易于操作的脑机接口设备和软件被开发出来,成为了研究和应用的工具。
脑机接口技术的发展一直在努力将其应用扩展到更广泛的领域,目前已经形成了一些具有实际应用价值的成果,比如2015年美国科技公司Neurable发布的脑机接口头盔——Neurable,以及2020年国内某公司发布的智能眼镜——“脑控眼镜”等等。
三、脑机接口技术的应用领域脑机接口技术目前广泛应用在医疗、娱乐、助理、互联网等等领域,下面我们分别来看一下:1. 医疗领域:脑机接口技术在医疗领域的应用主要是为瘫痪和运动障碍患者提供生活上的帮助。
比如,通过大脑波信号控制机械臂进行日常生活活动,比如擦洗、拿取等等。
同时,也可以帮助康复患者进行一些针对性的训练。
2. 娱乐领域:脑机接口技术在娱乐领域的应用主要是为游戏提供控制方式。
通过脑机接口设备,玩家可以通过大脑活动控制电子游戏,并且可以在游戏中获得更多的乐趣。
脑机接口技术的研究现状及其应用前景

脑机接口技术的研究现状及其应用前景当我们想到脑机接口技术,可能会想到科幻电影或小说中的场景:能够通过意念控制机器人、电脑或其他设备,或者治疗失去运动能力的人的疾病。
但是,现实中的脑机接口技术已经取得了很大进展,其应用领域也越来越广泛。
本文将介绍脑机接口技术的研究现状,以及其未来的应用前景。
一、脑机接口技术的基本原理脑机接口技术(Brain-Computer Interface,BCI)是一种通过直接测量大脑活动而不依赖于人类外部肌肉或神经系统运动的方法,实现人脑和计算机或其他设备的交互。
通常包括两个主要方面:脑-机界面和脑-网络界面。
脑-机界面主要研究将大脑信号转化为可控制计算机或其他设备的形式,包括可以控制机器人、轮椅、假肢或其他设备的运动和行为。
脑-网络界面则涉及将大脑信号转化为可以传输到远程计算机或网络的形式,从而实现远程控制。
这种技术主要由以下几个组成部分构成:1. 信号采集设备:通常是EEG(脑电图)或MEG(脑磁图)设备,用于量化大脑活动。
2. 信号处理软件:用于分析和处理采集到的大脑信号。
3. 控制设备:根据分析处理后的大脑信号,控制机器人、电脑或其他设备。
二、脑机接口技术的研究现状在过去的几十年中,脑机接口技术已经取得了很大的发展。
最早的脑机接口技术主要是利用昂贵且笨重的设备进行实验。
但随着技术的发展,越来越多的研究者开始使用小巧、低成本的脑机接口设备,这将脑机接口技术的研究带到了更广泛的领域。
目前,脑机接口技术主要包括以下几种类型:1. 运动控制最早的脑机接口应用是运动控制,旨在帮助失去运动能力的人。
在这种应用中,脑机接口设备通过拦截大脑活动信号识别用户想要做出的运动,然后操纵电动轮椅、假肢或其他辅助设备实现这些运动。
随着技术的发展,运动控制应用正在不断扩展,比如控制机械臂、运动假肢或其他辅助设备,以帮助那些失去四肢的人。
2. 人机交互像微软的Kinect和Sesame Street Workshop这样的机构正在研究如何通过人的意念控制计算机。
脑机接口技术的现状及应用前景

脑机接口技术的现状及应用前景随着科技的飞速发展,人工智能、物联网等新兴技术正在不断涌现,其中脑机接口技术更是备受关注。
脑机接口技术是一种将人脑和计算机直接连接的技术,可以通过直接读取人脑信号,实现人脑和计算机的交互和通信。
本文将从脑机接口技术的现状及应用前景两个方面进行探讨。
一、脑机接口技术的现状脑机接口技术已经经过多年发展,已经逐渐进入实用化阶段。
目前,我们可以直接通过脑机接口技术来控制机器人、智能家居、电子设备等,也可以通过脑机接口技术进行脑波分析、失智症筛查等医学应用。
下面我们将分别从控制技术和医学应用两个角度探讨脑机接口技术的现状。
1. 控制技术脑机接口技术在控制技术方面的应用领域非常广泛。
通过人脑的思维和情感,我们可以直接控制机器人的移动、捡起物品等动作,也可以控制智能家居的电视、灯光、窗帘等设备,人们可以更加方便、舒适地生活。
除此之外,脑机接口技术在游戏、教育等领域也有广泛的应用。
比如,VR头盔和脑机接口技术的结合,可以让玩家直接通过脑波和眼动来操作游戏中的角色,增强游戏的互动性和体验感。
在教育领域,脑机接口技术可以帮助学生更好地理解和记忆知识,改变传统教学方式,让学生更好地掌握知识。
2. 医学应用脑机接口技术在医学领域有着广泛的应用,其中最常见的是脑波分析和失智症筛查。
脑波分析是一种通过记录脑电图来研究人脑的功能和结构的方法,主要应用于研究脑功能障碍、认知疾病等方面。
而失智症筛查则是通过分析脑电图、眼动和特定的行为反应,来判断相关情况是否存在,有助于提高病人的诊断和治疗水平。
二、脑机接口技术的应用前景随着脑机接口技术的不断发展和应用,它对人类的生活和医学领域都具有重要作用。
以下是脑机接口技术应用前景的一些可能性:1. 神经康复失去记忆能力、语言和运动能力等问题,对人的生活影响非常大。
脑机接口技术可以通过直接与大脑进行交流来改善这些问题,例如使用脑机接口技术改善神经病变患者的生活。
2. 认知监测随着人均寿命的逐渐延长和老龄化问题的加剧,脑机接口技术也将成为一个重要工具,通过对老年人和失智症患者的认知能力进行监测,以及谴责并补救有所损失。
脑机接口技术的现状与前景

脑机接口技术的现状与前景现代科技的进步日新月异,不断涌现出各种新技术和新概念。
其中脑机接口技术作为神经科学、人工智能、机械工程等学科的交叉应用,已经成为近年来最受瞩目和研究的领域之一。
本文将探讨脑机接口技术的现状、应用领域和未来发展趋势。
一、脑机接口技术的现状脑机接口技术简单地说,就是通过传感器记录人脑内神经元的活动,然后将这些信息转化为计算机指令的过程。
脑机接口技术的主要任务是研究大脑和计算机之间的信息交互,以实现对人类意识和行为的控制。
目前,脑机接口技术可以分为两类,一种是非侵入式脑机接口技术(non-invasive BCI),另一种是侵入式脑机接口技术(invasive BCI)。
非侵入式脑机接口技术主要用于采集大脑活动信号,它通常需要监测大脑表面、头皮或额叶的电活动、脑磁场、眼膜电信号或肌电信号等,并将这些信号转换成计算机能够处理的数字信号。
非侵入式脑机接口技术通常用于研究大脑的意识、记忆、语言、认知、情感等方面的基础问题,如神经科学、心理学、医学和工程学等领域。
侵入式脑机接口技术,顾名思义,是指采用数学和工程技术来实现对人脑进行干预和控制。
这种技术需要在头颅骨披上开一个小孔,用一根细的电极插入大脑和神经纤维中,然后记录和放大目标区域的微弱电信号。
最后,将信号转化成计算机命令来控制任何需要控制的对象(如车辆、机器人、假肢等)。
这种技术的主要优势在于它提供了更高的信噪比,从而提供了更加精确的信息。
其主要应用领域是残疾人辅助技术、医学治疗、军事和航空等方面。
在脑机接口技术发展的过程中,最大的挑战在于如何避免干扰和噪音对信号的影响。
同时,由于人脑的复杂性,目前所研究的领域还局限于一些基本的认知方面。
因此,尽管非侵入式脑机接口技术仍存在一些局限,但它也是一种更加广泛应用的技术,具有更强的研究前景。
二、脑机接口技术的应用领域脑机接口技术可以在许多方面应用,包括医学、军事、个人与家庭娱乐等领域。
在医学领域,脑机接口技术可以被应用于疾病的诊断和治疗。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一
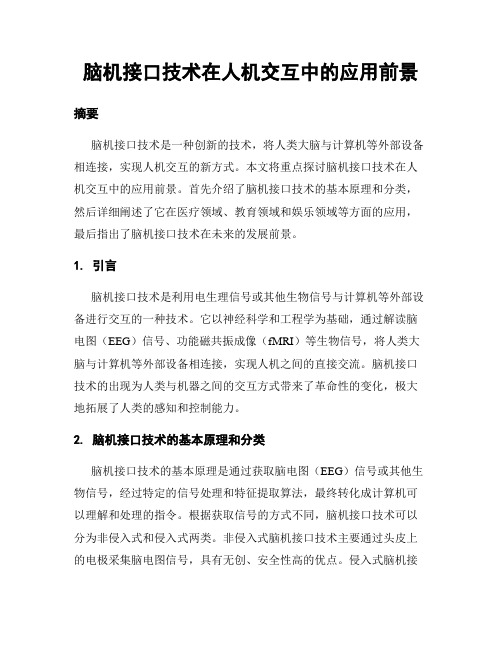
图2基于P300的BCI轮椅控制
实验都是基于脑电Q波的,因其有信号频段固定、信 噪比较高、普 适度高、训练 少等优点。设 计了一种面向 服务机器人的 便携式脑机接 口系统。使用 者根据指示器 指示灯选择控 制任务,并通
图5本田公司研发的脑控服务机器人
出了一种同步操作BCI系统,应用非侵入性EEG信号 识别用户的想法,分别想象脚、口和左右手运动,发 出前进、停止、左转和右转四种命令,系统采用两步 校准,用无线电传输命令操纵两轮机器人完成任务(见
WAM机械手引导中风患者的运动,系统存在触觉
1应用研究现状
1.1上肢康复机器人 将机器人技术应用于上肢康复,既可提供有效的 康复训练,又不增加临床医疗人员的负担和卫生保健 的成本。应用了脑机接口技术的上肢康复机器人更为 康复领域的深入发展拓宽了渠道。 清华大学旧1通过基于稳态视觉诱发电位(SSVEP) 构造的BCI获取控制指令,通过可编程逻辑控制器(PLC)
控制机械手完成规划的动作,最终控制多自由度机械 手完成倒水动作,并采用类似方法开发了一套结合脑 机接口技术的上肢康复训练系统,应用于人体康复研 究。东南大学H1设计的上肢康复机器人系统,利用计 算机上的虚拟现实动画刺激患者想象肢体的运动并形 成视觉反馈,采用小波包算法提取特征向量,并通过 基于马氏距离的线性判别分类器分类。康复医师可通 过调整康复机器人训练参数,帮助患者对完好的运动 神经系统进行进一步训练。西安交通大学旧1开发了一 个基于BCI驱动的神经义肢手驱动控制系统,利用每 个实验者EEG数据的最高离线识别率下的BP神经网络 结构参数,进行各自手动作EEG的在线识别,并用该 系统完成了假肢手四种动作(手臂自由状态、手臂移动、 手抓取、手张开)的驱动。 荷兰的研究小组哺1通过BCI系统分析稳态视觉诱
图4基于P300的双层共享策 略轮椅控制 图3同步操作BCI控制的两 轮机器人
BCI轮椅控制系统。将虚拟环境中行线和列线交
叉点作为P300的目标点选项,被选中后轮椅可自动导 航到达。该研究机构还用类似方法实现了BCI系统对 机器人的远程控制。 Millan等¨卜191在自适应BCI智能轮椅控制系统 的研究也取得了丰硕成果。其设计的系统分析操作者 执行想象左手运动、字词联想和放松三种思维作业时 的脑电波,分别对应左转、右转和前进三个操作命令, 系统能实时持续解读操作者脑电控制命令完成轮椅的 智能控制(自主避障和防撞等)。Alexandre等旧驯提
0引言
脑机接口(Brain—Computer Interface,BCI) 是近年来发展起来的一种新型人机交互方式,它可利 用大脑活动电信号重塑人与外界的交流通路。研究 表明,大脑在进行思维活动、产生动作意识或受外 界刺激时,神经细胞将产生几十毫伏的微电活动, 大量神经细胞的电活动传到头皮表层形成脑电波 (Electroencephalography,EEG),该EEG信号可以 体现出某种节律和空间分布的特征h-2]。BCI系统是通 过对EEG信号进行实时分析,判断和解码人的控制意图, 并将其转换为机器人等外部设备的控制输入量并指导 其完成指定任务,系统构成如图1所示。
图3)。Ana C.Lopes等‘211设计了一种基于P300的
Rebot Technique and Application 201 2.6
13
万方数据
■…山。
过闭眼产生含有相关控制信息的脑电信号,运动控制 指令通过无线传输给服务机器人并控制其完成相应动 作。另一组实验使用远程脑控制模式控制服务机器人在 四个方向上运动的组合实验,考察了系统的实时性和控 制的准确性,受试者可达到91.5%的控制准确率。清华 大学例通过想象左手、右手和脚的运动产生左转、右转 和前进三种控制命令,控制机器狗进行足球比赛,该系 统实现三分类的分类精度也已达到了世界领先水平。 美国华盛顿大学比卜281研究了基于PR2机器人的 BCI控制系统,提出了一种自适应分层BCI体系,应用 了基于SSVEP电位分层适应菜单界面来选择潜在操作 任务,通过多层次示教,可直接用脑电信号控制半自 主机器人完成抓取动作等远端遥操作机器人应用任务 (见图6)。Yongwook等人旧圳提出了一种基于EEG的 BCI脑驱动仿人机器人的导航系统。实验过程包括离线 训练部分、在线反馈测试部分和实时控制部分。应用 层次化构建的二级分类器(意图活动分类器(IAC)和 运动方向分类器(佃C))训练并构建异步BCI系统, 三位受试者均成功地使用BCI系统控制NAO仿人机器 人完成室内迷宫导航任务。 4)个体差异对BCI系统运行的实际效果有明显的 影响。如何有效调整参数以消除不同个体差异对系统的 影响,也是一项具有挑战性的研究内容。 5)笨重繁琐的操作系统已经不能顺应实用化需求, 对微处理器替代计算机的小型化和无线传输促进便携 化的需求也更为紧迫。 6)同步与异步模式的问题,即解决非控制时间段 发送的误控制命令并排除自发脑电非控制信号的干扰。 7)适应生物学习机制的调节方法。使系统适应由 于生物脑的学习机制带来的脑电变化或变异,以实现广 义的脑机交互控制。 8)机器人机构设计人性化、灵巧化、控制精准化, 便于控制与检修。扩大服务机器人的活动空间和应用领 域,提高机器人对外界环境的适应性。 9)亟须建立准确、客观的评价标准,并据此评价 系统及操作者的操作情况。 2)信号的实时在线处理问题。无法实现实时的信 号在线处理,就难以保证机器人的实时控制精度。 3)系统实时运行中的反馈问题。缺少即时可靠的 视觉、听觉和触觉反馈,不利于系统回路构成及控制过 程的偏差矫正。
控制命令l
::鐾二b刮!蔓鳖k刊晕
反馈卜.——————一控制装置
发电位信号,来产生控制信号控制自主机器人FRIEND II。四种频率代表四种任务。在菜单系统中选择任务(如 向杯中倒饮料等),康复机器人包含规划实例、环境 模型和一系列传感器。实验所控制的机械臂为安装在 电动轮椅上的七自由度机械手。Jong—Hwan Lee等人… 利用FMRI技术检测运动想象电位,经过处理后作为 BCI系统的控制指令,并通过视觉诱发电位反馈来调整 动作,进一步控制机械手在三维空间内完成抓取目标物 的简单动作。斯坦福大学旧1的研究小组将机械手捆绑 在患者前臂上,使用基于BCI的共享控制策略控制一个
反馈,完成了沿肘部方向的单自由度运动控制。此外, Graz理工大学Christoph Guger等人旧1也研制出了处 理左右手运动想象电位的BCI系统用于控制假肢,其 分类效果和控制精度较以往都有了较大提高。 目前的脑机接口上肢康复机器人,已经可以初步 实现对上肢及手部多种运动的分类及运动控制,且分 类及控制精度较以往有较大提升,但大多为本地脑电 控制,且处于实验室探索பைடு நூலகம்段,其在控制连续性、灵 活度、小型化和远程辅助控制方面上尚有不足。
2脑机接口在机器人控制中面临的挑战
以上研究成果为BCI在机器人的控制应用中做出 了重要尝试,也取得了可喜的成果,但大部分研究还 处在实验室研究的水平,仍面临着许多问题和挑战。 现总结如下: 1)需要测试选择较优的特征脑电信号,以解决目 前多种脑电模式在实际使用中还存在着的信息传输率 低、容易造成操作者疲劳和不适等问题。
劳,如何设计更加人性化、 易操作的人机交互界面,任
重道远。
1.3仿人服务机器人
服务机器人通常为人形,常被用为代理、助理或 者通信中介。仿人机器人的直接大脑操控技术,需要 处理仿人机器人内在的高自由度。在普通机器人的操 作中,操纵杆、语音识别、视觉反馈控制系统较为常见, 但是与BCI系统联系在一起后,这些方法存在低输出 与低信噪比的问题,这也成为了众多研究小组的研究 方向。图5所示即为日本本田公司于2008年研发的脑 控服务机器人,可识别出操作者运动想象意图并做出 回应。 天津大学幢3‘251从事这方面的研究较早,且大多数
1 2 1机器人技术与应用2012.6 万方数据
综述1R。山。
1..2’轮式机器人 轮式机器人可以帮助老年人或残疾人移动到期望 位置,解决了移动不便者的运动期望。将BCI应用于 轮式机器人的控制,吸引了多数研究机构的注意。康 复轮椅便是该研究领域的典型应用。 新加坡国立大学u叫所研发的基于P300的BCI轮 椅控制系统是一个典型的例子(见图2)。此系统基于 功能键盘式控制方式把前进、左转和停止等操作项作 为P300功能键选项,操作者用各种脑电模式产生的控 制信号进行选择,轮椅受程序控制按设定好的固定路 线到达目的地。Piccion等H¨也采用P300方式实现 对轮椅的控制,该系统用四个方向指示图标作为P300 选项,用以控制移动外设的运动方向。Mandel等u引 采用以不同频率闪烁的LED灯分别代表四个方向的控 制命令,开发实现了基于稳态视觉诱发电位的轮椅控 制系统。Minguez小组u3。161通过智能轮椅导航系统为 操作者提供了可视化的虚拟现实的3D导航图,通过实 时3D重建的运动场景设计构建了基于虚拟现实技术的
Barret
图1基于EEG的BCI系统组成
脑机接口与机器人控制的结合,不仅为老年人和 残疾人的日常护理开辟了新路,也为正常人提供了特 殊环境下的全新交流方式。将脑机接口技术应用到机 器人控制中,仍是一个较新的研究领域。本文依照脑 机接口所控制的机器人的不同,分别对上肢康复机器 人、轮式机器人和仿人服务机器人三类较为常见的控 制对象进行总结。
3发展趋势
基于BCI技术的机器人系统都还处于研究初级阶 段,难免问题重重,但是随着研究的深入,问题终将被 解决,更多的先进技术也会应用到该领域旧0‘31j。
图6基于SSVEP的脑控PR2机器人完成操作任务
计算机视觉和虚拟现实技术的引入,不仅可以为操 作者提供可视化移动外设导航和监控系统,还可以为操 作者提供更加人性化的控制界面以消除其疲劳与不适。 机器人自主导航技术和避障技术的发展,也会一 定程度地满足系统对实时控制的要求及消除时延带来 的负面影响。脑控机器人的种类也将更加丰富,遍布生 活中的各个角落。 多种控制模式的融合,会一定程度地减小操作者 个体差异带来的影响,并有助于提高机器人控制系统的 快速性和准确性。