谐波齿轮减速机优缺点及应用
谐波传动减速器原理

谐波传动减速器原理
谐波传动减速器是一种基于谐波振动原理工作的精密减速装置。
它主要由柔性齿条、柔性齿轮、星轮、轴套和外壳等组成。
在谐波传动减速器中,谐波振动由外部驱动器引起。
驱动器通过柔性齿轮施加周期性外力,使之产生弯曲变形。
柔性齿条与柔性齿轮的齿数不同,由于弹性形变的特性,齿条和齿轮之间会发生相对位移。
当外力周期性施加于柔性齿轮上时,柔性齿条的齿数和位置会发生变化。
这种变化会导致星轮的旋转,同时将输出转矩传递给输出轴。
输出轴通过轴套连接到外壳上,从而实现减速效果。
谐波传动减速器的减速比取决于外驱动传动器与输出轴之间的齿数比。
通常情况下,谐波传动减速器可以实现较高的减速比,同时还具有大的扭矩输出。
此外,谐波传动减速器具有结构紧凑、响应快速和传动效率高等优点,广泛应用于机械领域。
总结起来,谐波传动减速器利用谐波振动原理实现减速效果,通过驱动器的作用使得柔性齿条和齿轮产生相对位移,从而实现输出轴的旋转和扭矩输出。
一分钟谈谈RV减速器和谐波减速机的优缺点

一分钟谈谈RV减速器和谐波减速机的优缺点在机械工业中,减速器是一个非常关键的部件。
既可以将高速运转的电机输出降低到需要的低速,又可以增加电机输出的扭矩大小。
在减速器中,RV减速器和谐波减速机是两类经常被使用的减速器,下面我们来谈谈它们各自的优缺点。
RV减速器RV减速器采用圆锥齿轮匹配的技术,具有精度高、径向间隙小、扭矩大等特点。
它具有以下优点:1.高精度:RV减速器精度可达到±3角分,且运转期间波动小,稳定性高。
2.高扭矩:RV减速器可承受大的扭矩负荷。
在相同尺寸的条件下,RV减速器的扭矩可达到其他减速器的两倍以上。
3.节能效果好:由于RV减速器的高精度和低波动,减小了传递过程中的能量损失,使得机械系统更加节能。
当然,RV减速器也有一些缺点,如:1.价格较高:RV减速器的制造工艺相对复杂,因此价格也比其他减速器要高一些。
2.噪音较大:由于RV减速器的制造工艺较为复杂,所以在运转中会有一定的噪音。
谐波减速机谐波减速机是通过通过输入、输出柔性转子、固定轮减速获得减速效果的一种新型减速机。
它具有以下优点:1.稳定性好:谐波减速机的输出稳定,不易产生振动和噪音。
同时,在高速、小载荷的情况下,谐波减速器的效果更佳.2.重量轻:由于谐波减速机采用的是柔性转子和固定轮,因此它的重量非常轻,可以减轻机械系统负荷。
3.尺寸小:谐波减速机的体积小,可以极大地节约装置的空间。
当然,谐波减速机也有一些缺点,如:1.精度略低:谐波减速机的精度相对较低,通常只能达到±15-20角分之间。
2.价格高:谐波减速器的制造难度较大,因此制造成本也比较高。
总结RV减速器和谐波减速机各有优缺点。
在选择减速器时,需要根据具体的使用情况选择最适合的一种。
如果需要较高的精度和扭矩,可以选择RV减速器;如果需要轻量化、体积小、噪声低,可以选择谐波减速机。
同时,价格也是一个需要考虑的因素。
RV减速机和谐波减速机对比,哪个性能更好?

大量应用在关节型机器人上的减速器主要有两类:RV减速机和谐波减速机。
那么,对于这两种减速机,哪个更有优势?两者的原理、优劣势区别在哪?是否可以相互取代?让我们一起来了解一下。
谐波减速机用于负载小的工业机器人,或者是大型机器人末端几个轴,特点是体积小、重量轻、承载能力大、运动精度高,单级传动比大。
谐波减速机是谐波传动装置的其中一种,谐波传动装置包括了加速机和减速机。
谐波减速机主要结构有刚轮、柔轮、轴承和波发生器,缺一不可。
其中,刚轮的齿数略大于柔轮的齿数。
RV减速机常适用于扭矩较大的机器人关节中,具体是腿部腰部和肘部这三个关节。
负载大的工业机器人,一二三轴用的都是RV减速机。
RV减速机与谐波减速机相比具有更高的疲劳强度、刚度和寿命。
谐波减速机的缺点还包括,随着使用时间增长,运动精度会降低。
跟谐波减速机重量轻体积小的的优点相反,RV减速机的缺点是其重量重,外形尺寸较大。
两者均为少齿差啮合,不同的是谐波减速机中的一种关键齿轮具有柔性,需要反复高速变形,因而较为脆弱,所以谐波减速机跟RV减速机相比,承载能力低,寿命短。
RV减速机一般用的是摆线针轮,谐波减速机以前用的的是渐开线齿形,现在有些厂家用的是双圆弧齿形,比渐开线更高级一些。
与谐波减速机相比,RV减速机是一种新兴起的传动产品,RV减速机其实是在传统针线针轮减速机的基础上发展起来的,不仅克服了一般针摆传动的缺点,而且具有更多的优势,比如寿命长、保持精度稳定、效率高、传动顺畅等。
对于两者能不能替代的问题,概括来说其实有两种说法。
1、一是可以替代,但只是部分型号之间可以替代。
我们前面已经提到过RV减速机比机器人常用的谐波传动的疲劳强度、刚性和寿命都要高得多,而且回差精度稳定,不会像使用时间增长的谐波传动那样,运动精确度会明显降低。
很多国家的高精度机器人传动多采用RV减速机,所以RV减速机有一种发展趋势,逐渐开始取代了先进机器人传动中的谐波减速机。
谐波减速机的特点是轻和小,在这方面,行星减速机和RV减速机却很难做到。
谐波减速器在机器人中的应用
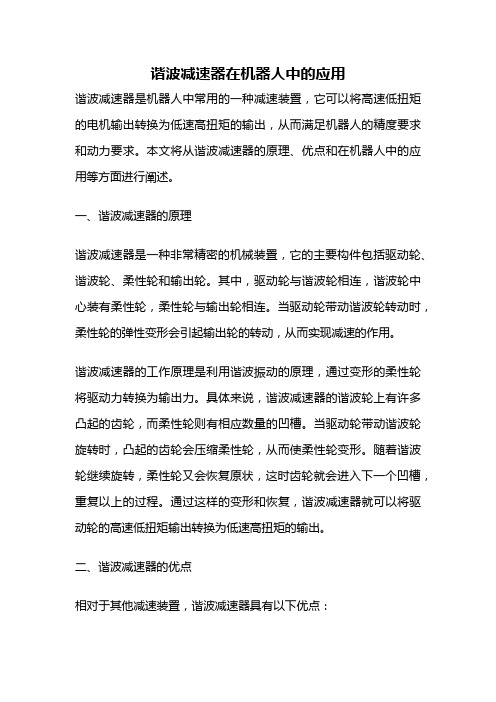
谐波减速器在机器人中的应用谐波减速器是机器人中常用的一种减速装置,它可以将高速低扭矩的电机输出转换为低速高扭矩的输出,从而满足机器人的精度要求和动力要求。
本文将从谐波减速器的原理、优点和在机器人中的应用等方面进行阐述。
一、谐波减速器的原理谐波减速器是一种非常精密的机械装置,它的主要构件包括驱动轮、谐波轮、柔性轮和输出轮。
其中,驱动轮与谐波轮相连,谐波轮中心装有柔性轮,柔性轮与输出轮相连。
当驱动轮带动谐波轮转动时,柔性轮的弹性变形会引起输出轮的转动,从而实现减速的作用。
谐波减速器的工作原理是利用谐波振动的原理,通过变形的柔性轮将驱动力转换为输出力。
具体来说,谐波减速器的谐波轮上有许多凸起的齿轮,而柔性轮则有相应数量的凹槽。
当驱动轮带动谐波轮旋转时,凸起的齿轮会压缩柔性轮,从而使柔性轮变形。
随着谐波轮继续旋转,柔性轮又会恢复原状,这时齿轮就会进入下一个凹槽,重复以上的过程。
通过这样的变形和恢复,谐波减速器就可以将驱动轮的高速低扭矩输出转换为低速高扭矩的输出。
二、谐波减速器的优点相对于其他减速装置,谐波减速器具有以下优点:1. 高精度:谐波减速器的工作原理是利用谐波振动的原理,通过变形的柔性轮将驱动力转换为输出力,所以它的精度非常高,通常可以达到0.1度以下。
2. 高扭矩密度:谐波减速器的输出轮直接与柔性轮相连,不需要传递动力的中间轴,因此具有较高的扭矩密度,可以满足机器人的高动力要求。
3. 超小尺寸:谐波减速器结构紧凑,体积小,重量轻,可以自由安装在机器人的关键部位,提高机器人的灵活性和精度。
4. 高可靠性:谐波减速器的设计简单,几乎没有摩擦和磨损,寿命长,运行稳定可靠。
谐波减速器在机器人中应用非常广泛,其中最典型的就是机械臂的关节传动。
机械臂是工业机器人的重要组成部分,它由多个关节组成,需要精确的控制和高扭矩的输出。
谐波减速器可以满足机械臂的高精度和高扭矩要求,同时体积小、重量轻,可以自由安装在机械臂的关键部位,提高机械臂的灵活性和精度。
谐波减速机原理

谐波减速机原理谐波齿轮减速机工作原理谐波齿轮减速机由固定的内齿刚轮、柔轮、和使柔轮发生径向变形的波发生器组成,谐波齿轮减速机是齿轮减速机中的一种新型传动结构,它是利用柔性齿轮产生可控制的弹性变形波,引起刚轮与柔轮的齿间相对错齿来传递动力和运动。
这种传动与一般的齿轮传递具有本质上的差别,在啮合理论、集合计算和结构设计方面具有特殊性。
谐波齿轮减速机具有高精度、高承载力等优点,和普通减速器相比,由于使用的材料要少50%,其体积及重量至少减少1/3。
组成与结构谐波齿轮减速机由刚轮、柔轮、和波发生器三个主要构件组成。
•固定刚轮是一个刚性的内齿轮••柔轮是一个容易变形的薄壁圆筒外齿轮,它们一同具有三角形(或渐开线)的齿形,且两者的周节相等,但刚轮比柔轮多几个齿(通常为两齿)••波发生器由一个椭圆盘和一个柔性球轴承组成,或者由一个两端均带有滚子的转臂组成。
•••通常波发生器为原动体,柔轮和刚轮之一为从动体,另一个为固定件。
图2.谐波齿轮减速器的结构组成在未装配前,柔轮及其内孔呈圆形,当波发生器装入柔轮的内孔后,由于波发生器的长度略大于柔轮的内孔直径,柔轮撑成椭圆形,迫使柔轮在椭圆的长轴方向与固定的刚轮完全啮合,在短轴方向完全分离,其余各处的齿视柔轮回转位置的不同,或者处于“啮入”状态,或者处于“啮出”状态。
由于刚轮固定,波发生器逆时针转动时,柔轮作顺时针转动。
当波发生器连续回转时,柔轮长轴和短轴及“啮入”、“啮出”的位置随之不断变化,柔轮齿由啮入转向啮出,又啮合转向啮出,由啮出转向脱开,如此,啮入、啮合、啮出、脱开、啮入、啮合……往复循环,迫使柔轮连续转动。
柔轮随着波发生器转动过程中,其中一个齿从与刚轮的一个齿啮合到再一次与刚轮上的这个齿相啮合时,柔轮恰好旋转一周,而此时波发生器旋转了很多圈,波发生器的旋转圈数与柔轮旋转圈数(1圈)之比,即为谐波齿轮减速器的减速比,故其减速比很大。
在整个运动过程中,柔轮的变形在柔轮圆周的展开图上是连续的简谐波形,因此,这一传动称之为谐波齿轮传动。
谐波减速器原理及特点

谐波减速器原理及特点1.1传动原理谐波传动减速器英文名称:harmonic gear drive,主要由波发生器、柔性齿轮和刚性齿轮三个基本构件组成,如图1-1所示。
三个构件中可以任意固定一个,其余两个一个主动,一个从动,可以实现减速或增速(固定传动比),也可以换成两个输入、一个输出,组成差动传动。
柔轮轮体很薄,其上有特制的完整的齿圈(360°),轮齿模数较小,一般为0.2~1.5mm,波发生器是一个凸轮部件,其两端与柔轮1的内壁相互压紧。
柔轮为可产生较大弹性变形的薄壁齿轮,其内孔直径略小于波发生器的总长。
当波发生器装入柔轮后,迫使柔轮的剖面由原先的圆形变成椭圆形,其长轴两端附近的齿与刚轮的齿完全啮合,而短轴两端附近的齿则与刚轮完全脱开;周长上其他区段的齿处于啮合和脱离的过渡状态。
若波发生器顺时针方向旋转,则柔轮和刚轮的啮合区也随着变化,轮齿依次进入啮合和脱离的状态。
柔轮的变形过程基本上是一个对称的谐波,因此称为谐波齿轮传动。
对于双波传动其特点是发生器转一圈,柔轮相对于刚轮在圆周方向转过两个齿距的弧长,它有两个啮合区。
双波谐波齿轮传动变形时柔轮表面应力小,易获得大的传动比,结构较简单。
对于三波传动则齿数差为3,有三个啮合区,三波传动的特点是作用于轴上的径向力小,内应力较平衡,精度较高,变形时柔轮表面应力较双波的大,而且结构较复杂。
图1-1 谐波齿轮减速器组成当波发生器沿图示方向连续转动时,柔轮的变形不断改变,使柔轮与刚轮的啮合状态也不断改变,由啮入、啮合、啮出、脱开、再啮入……,周而复始地进行,从而实现柔轮相对刚轮沿波发生器相反方向的缓慢旋转,如图1-2所示。
图1-2 谐波齿轮啮合简图在传动过程中,波发生器转一周,柔轮上某点变形的循环次数称为波数,以n 表示。
常用的是双波和三波两种。
双波传动的柔轮应力较小,结构比较简单,易于获得大的传动比。
故为目前应用最广的一种。
谐波传动减速器柔轮和刚轮的齿距相同,但齿数不等,通常采用刚轮与柔轮齿数差等于波数,即:Z2-Z1=n(1-1)式中:Z2、Z1--分别为刚轮与柔轮的齿数。
谐波减速机用途

谐波减速机用途
谐波减速器是一种高性能、精密化、小体积、轻重量、高可靠性的减速传动设备。
谐波减速器的主要用途:
1. 工业机械:可以用于各种工业机械,如机床、钢铁设备、塑料机械、印刷设备、包装设备、食品机械等。
2. 机器人:作为机器人的关键部件之一,可以用于各种工业机器人、服务机器人和家用机器人。
3. 航空航天:可用于各种航空航天装备,如航空发动机、空调系统、机载雷达、卫星、火箭等。
4. 医疗设备:可用于各种医疗设备,如心脏起搏器、药物泵、血液透析机、医用机器人等。
5. 军事装备:可用于各种军事装备,如坦克、武器装备、通信装备、电子设备等。
6. 其他:可用于各种轻工、电子、显示、通讯、汽车、船舶、准军事装备等领域。
世界上最精密的减速器制造商——日本Nabtesco和HarmonicDrive
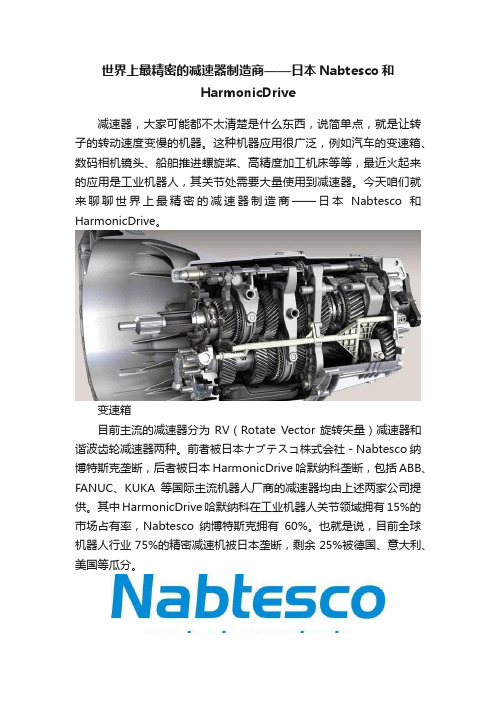
世界上最精密的减速器制造商——日本Nabtesco和HarmonicDrive减速器,大家可能都不太清楚是什么东西,说简单点,就是让转子的转动速度变慢的机器。
这种机器应用很广泛,例如汽车的变速箱、数码相机镜头、船舶推进螺旋桨、高精度加工机床等等,最近火起来的应用是工业机器人,其关节处需要大量使用到减速器。
今天咱们就来聊聊世界上最精密的减速器制造商——日本Nabtesco和HarmonicDrive。
变速箱目前主流的减速器分为RV(Rotate Vector旋转矢量)减速器和谐波齿轮减速器两种。
前者被日本ナブテスコ株式会社 - Nabtesco纳博特斯克垄断,后者被日本HarmonicDrive哈默纳科垄断,包括ABB、FANUC、KUKA等国际主流机器人厂商的减速器均由上述两家公司提供。
其中HarmonicDrive哈默纳科在工业机器人关节领域拥有15%的市场占有率,Nabtesco纳博特斯克拥有60%。
也就是说,目前全球机器人行业75%的精密减速机被日本垄断,剩余25%被德国、意大利、美国等瓜分。
Nabtesco纳博特斯克HarmonicDrive哈默纳科RV减速器由摆线针轮和行星支架组成,其体积小、抗冲击力强、扭矩大、定位精度高、振动小、减速比大,被广泛应用于工业机器人、机床、医疗检测设备、卫星接收系统等领域。
工业机器人RV减速器具有高得多的疲劳强度、刚度和寿命,而且回差精度稳定,包括我国在内的许多国家的机器人传动系统多采用RV减速器。
其可用于各种场景,可耐受高功率、长时间使用,一般将其放置在机座、大臂、肩部等重负载的位置。
RV减速器RV减速器谐波齿轮减速器是一种由固定的内齿刚轮、柔轮和使柔轮发生径向变形的谐波发生器组成。
这是一种新型传动结构,其利用柔性齿轮产生可控制的弹性变形波,引起刚轮与柔轮的齿间相对错齿来传递动力和运动。
谐波齿轮减速器谐波齿轮减速器谐波齿轮减速器这种传动与一般的齿轮传递具有本质上的差别,在啮合理论、集合计算和结构设计方面具有特殊性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
谐波齿轮减速机优缺点及应用
作者: 由于谐波齿轮减速机的构造和工作原理与普通的齿轮减速机友很大的差异,决定其在应用上有所不同,下面列出谐波齿轮减速机的优缺点及应用领域。
主要优点
(1)传动速比大。
单级谐波齿轮传动速比范围为70~320,在某些装置中可达到1000,多级传动速比可达30000以上。
它不仅可用于减速,也可用于增速的场合。
(2)承载能力高。
这是因为谐波齿轮传动中同时啮合的齿数多,双波传动同时啮合的齿数可达总齿数的30%以上,而且柔轮采用了高强度材料,齿与齿之间是面接触。
(3)传动精度高。
这是因为谐波齿轮传动中同时啮合的齿数多,误差平均化,即多齿啮合对误差有相互补偿作用,故传动精度高。
在齿轮精度等级相同的情况下,传动误差只有普通圆柱齿轮传动的1/4左右。
同时可采用微量改变波发生器的半径来增加柔轮的变形使齿隙很小,甚至能做到无侧隙啮合,故谐波齿轮减速机传动空程小,适用于反向转动。
(4)传动效率高、运动平稳。
由于柔轮轮齿在传动过程中作均匀的径向移动,因此,即使输入速度很高,轮齿的相对滑移速度仍是极低(故为普通渐开线齿轮传动的百分之—),所以,轮齿磨损小,效率高(可达69%~96%)。
又由于啮入和啮出时,齿轮的两侧都参加工作,
因而无冲击现象,运动平稳。
(5)结构简单、零件数少、安装方便。
仅有三个基本构件,且输入与输出轴同轴线,所以结构简单,安装方便。
(6)体积小、重量轻。
与一般减速机比较,输出力矩相同时,谐波齿轮减速机的体积可减小2/3,重量可减轻1/2。
(7)可向密闭空间传递运动。
利用柔轮的柔性特点,轮传动的这一可贵优点是现有其他传动无法比拟的。
主要缺点
(1)柔轮周期性地发生变形,因而产生交变应力,使之易于产生疲劳破坏。
(2)转动惯量和起动力矩大,不宜用于小功率的跟踪传动。
(3)不能用于传动速比小于35的场合。
(4)采用滚子波发生器(自由变形波)的谐波传动,其瞬时传动比不是常数。
(5)散热条件差。
应用范围
谐波齿轮减速机在航空、航天、能源、航海、造船、仿生机械、常用军械、机床、仪表、电子设备、矿山冶金、交通运输、起重机械、石油化工机械、纺织机械、农业机械以及医疗器械等方面得到日益广泛的应用,特别是在高动态性能的伺服系统中,采用谐波齿轮传动
更显示出其优越性。
它传递的功率从几十瓦到几十千瓦,但大功率的谐波齿轮传动多用于短期工作场合。