卫星定位理论与方法-第13次课-伪随机码测距原理概要43页PPT
合集下载
伪距测距原理

背景——GPS 系统定位原理
已知卫星的位置(通过广播描述卫星运动的星历参数和历书参数),测量得到卫星和用户之间的相对位置(伪距PRN ),用导航算法(最小二乘法或卡尔曼滤波法)解算得到用户的最可信赖位置。
图1
获得伪距后,按照下式解算定位结果:
11223344
(1)(2)(3)(4)(,i B Corr PR B Corr PR B Corr PR B Corr PR SVx SVy +=+=+=+=其中,,)(,,)i i i i SVz B Corr i PR i Rx Ry Rz 为卫星位置,为接收机钟差等效距离,
为第颗卫星的已知修正量,为对第颗卫星的观测伪距,为接收机位置
伪距测量原理
GPS 定位的基础就是测距,即通过测量信号从卫星传播到接收机所用的时间获得卫星和接收机之间的距离(i PR c t =⨯∆)。
图2
利用伪随机码的自相关特性如图3,令本地码片以一定速度移动如图4,当本地复现码与从卫星传到的码相关值达到最大时,本地码移动了的时间即为所求
t ∆。
图3 自相关函数
Δt
t 1
t 2
卫星t 1时刻产生的码相位,
Δt 后到达
从卫星传到的码
接收机产生的复现码
卫星产生的码
将接收机产生的码移动Δt
图4信号捕获过程。
GPS定位的基本原理ppt课件

p)
(Nip
p i
)
含有待定点 坐标三个未 知数
整周模糊度,每 观测一个卫星就 有一个未知数
在一个历元,未知数多于方程数,无法求解,需通过多个历元观 测值求解
23
1 基本原理
2 测码伪距 3 载波相位测量 4 卫星坐标
3.2 载波相位测量的观测值
由接收机 瞬间测得 的不足一 周的部分
mT 0 qTT 0TDOP
TDOP qTT
18
1 基本原理
2 测码伪距 3 载波相位测量 4 卫星坐标
2.4 伪距绝对定位精度评价(续)
3、几何精度因子GDOP 综合考虑空间位置及钟差对定位结果的影响,可用几何精度因子
GDOP
GDOP qXX qYY qZZ qTT PDOP2 TDOP2
第四章 GPS定位的基本原理
1
1 基本原理 2 测码伪距
3 载波测相伪距 4 卫星坐标
GPS工作的基本原理 – 距离后方交会
已知点:GPS卫星 待定点:接收机(天线)
2
1 基本原理 2 测码伪距
3 载波测相伪距 4 卫星坐标
卫星的位置
卫星至测站的距离 信号的捕获及定位计算
3
1 基本原理 2 测码伪距
12
1 基本原理
2 测码伪距 3 载波相位测量 4 卫星坐标
2.3 伪距绝对定位原理(续)
在测站点的近似值Xi0、 Yi0、 Zi0处泰勒级数展开,取一阶项
/ip0+vip0
p i0
aip
Xi
bipYi
cip Zi
c ti
GPS 1-卫星伪距定位原理
bgps伪随机码的测距原理a观测方程b求解过程c精度评定a伪距观测方程的建立a伪距观测方程的建立续卫星信号由卫星到达测站的钟面传播时间
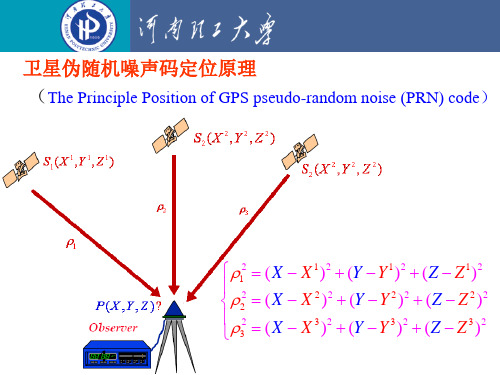
卫星伪随机噪声码定位原理 (The Principle Position of GPS pseudo-random noise (PRN) code)
12 ( X X 1 )2 (Y Y 1 )2 ( Z Z 1 )2 2 2 ( X X 2 )2 (Y Y 2 )2 ( Z Z 2 )2 2 3 ( X X 3 )2 (Y Y 3 )2 ( Z Z 3 )2
n j 1 n j 4 41 n j 1
j
Gi ( Ai (t )T Ai (t ))1 Ai (t )T Li (t ) 最小二乘解 41
4n j n j 4 4n j n j 1
现假定共观测了 nt 个历元,则可形成 nt 组误差方程组:
vi (t1 ) Ai (t1 ) Li (t1 ) n j 1 n j 1 j vi (t2 ) Ai (t2 ) X i n 1 n j 1 n j 1 Y Li (t2 ) i Zi D i Li (tni ) vi (jtni ) Ai (j tni ) n 1 n 1
线性化以后的伪距观测方程:
Dij (t ) (Dij (t ))0 - ki j (t )Xi - li j (t )Yi - mij (t )Zi ctij (t ) Ii j (t ) Ti j (t )
(-2)
式(1-2)中有三个测站未知数 X i , Yi , Zi 以及一个钟差 未知数 tij (t ),电离层和对流层改正一般通过专门的数学模 型另行处理。这样,接收机至少需要跟踪4颗卫星,才能 求解。
卫星伪随机噪声码定位原理 (The Principle Position of GPS pseudo-random noise (PRN) code)
12 ( X X 1 )2 (Y Y 1 )2 ( Z Z 1 )2 2 2 ( X X 2 )2 (Y Y 2 )2 ( Z Z 2 )2 2 3 ( X X 3 )2 (Y Y 3 )2 ( Z Z 3 )2
n j 1 n j 4 41 n j 1
j
Gi ( Ai (t )T Ai (t ))1 Ai (t )T Li (t ) 最小二乘解 41
4n j n j 4 4n j n j 1
现假定共观测了 nt 个历元,则可形成 nt 组误差方程组:
vi (t1 ) Ai (t1 ) Li (t1 ) n j 1 n j 1 j vi (t2 ) Ai (t2 ) X i n 1 n j 1 n j 1 Y Li (t2 ) i Zi D i Li (tni ) vi (jtni ) Ai (j tni ) n 1 n 1
线性化以后的伪距观测方程:
Dij (t ) (Dij (t ))0 - ki j (t )Xi - li j (t )Yi - mij (t )Zi ctij (t ) Ii j (t ) Ti j (t )
(-2)
式(1-2)中有三个测站未知数 X i , Yi , Zi 以及一个钟差 未知数 tij (t ),电离层和对流层改正一般通过专门的数学模 型另行处理。这样,接收机至少需要跟踪4颗卫星,才能 求解。
伪距定位原理.ppt

2. 伪距定位观测方程
The Observation Equations
2.1 真实的信号传播时延
Tj
j Tr T j
问 题
Tr
真实的信号传播时延能够直接获取吗?
2. 伪距定位观测方程
The Observation Equations
2.2 钟差
钟差(Clock Bias):卫星、接收机钟面时与卫星导航系统时之差
1. 相关知识回顾
Review
1.1 空间距离后方交会原理
GPS的定位体制:“多星、高轨、测距”
利用空间距离后方交会确定接收机的位置
(X 2,Y 2,Z2)
(X 3,Y3,Z3)
(X1,Y1, Z1)
(X 4,Y 4,Z4)
(X ,Y , Z )
1. 相关知识回顾
Review
1.2 卫星位置计算
tr tr Tr
t j t j T j
toc、a0、a1、a2
2. 伪距定位观测方程
The Observation Equations
2.3 信号传播时延
真实的信号传播时延:
j Tr T j
实测的信号传播时延:
%j tr t j
tj T j tj tr Tr tr
%j (Tr tr ) (T j t j )
l j X m jY n j Z ctr 0j %j ct j I j T j
小结 Summary
伪距定位原理是《GPS原理与应用》的核心内容,主要介绍 了伪距定位观测方程的建立和伪距定位观测方程的解,得到了必 须同时观测4颗卫星才能进行定位的结论。
作业题
1.利用GPS进行伪距定位,为什么必须至少同时观测4颗卫星? 2.如何利用GPS伪距定位观测方程解算用户位置?
GPS卫星定位的基本原理PPT课件
c (ba )(io n 4 -4)tr o p
将式(4-3)代入式(4-4),即得实际距离 系式为
i o n t r o (p 4c v -t 5a )c v t b
和伪距
之 间的关
18
GPS测量定位技术
二、伪距法定位的原理
如果已知卫星的钟差 和v t a接收机的钟差 ,v又t b 可精确求得 电离层折射改正和对流层折射改正,那么测定了伪距 ,就 可求 得实际距离 。实际距 离 与卫星坐 标(x、y、z)和 接收机坐标(X、Y、Z)之间又有下列关系:
4
GPS测量定位技术
二、单点定位和相对定位
GPS单点定位也叫绝对定位,就是采用一台接收机进行定位 的模式,它所确定的是接收机天线在WGS-84世界大地坐标系 统中的绝对位置,所以单点定位的结果也属于该坐标系统。
GPS单点定位的实质,即是空间距离后方交会。对此,在一 个测站上观测3颗卫星获取3个独立的距离观测量就够了。但是 由于GPS采用了单程测距原理,此时卫星钟与用户接收机钟不 能保持同步,所以实际的观测距离均含有卫星钟和接收机钟不 同步的误差影响,习惯上称之为伪距。其中卫星钟差可以用卫 星电文中提供的钟差参数加以修正,而接收机的钟差只能作为 一个未知参数,与测站的坐标在数据的处理中一并求解。因此, 在一个测站上为了求解出4个未知参数(3个点位坐标分量和1 个钟差系数),至少需要4个同步伪距观测值。也就是说,至少 必须同时观测4颗卫星。
16
GPS测量定位技术
二、伪距法定位的原理
为了解决定位问题,首先需将观测时得到的伪距 改正为 卫星至接收机之间的实际距离 。
设卫星钟的瞬时读数为时发出信号 ,t a 其正确的标准时刻
为 ; a 该信号到达接收机的时间为 ,t 其b 正确的标准时刻为 。
GPS卫星定位基本原理PPT课件

p1(Tp1 ) i (T i ) f (Tp1 T i )
于是由式()可得
i p1
(T
)
p1(Tp1) i (T i )
f
(Tp1
Ti)
f
•
i p1
第19页/共115页
(4.2.11)
第四章 GPS定位的基本原理
式()中的τ是在卫星钟和接收机钟同步的情况 下,卫星信号的传播时间。由于卫星信号的发射 历元是未知的,因此需要根据已知的观测历元tp1 (顾及对流层和电离层延迟改正)按下式计算信 号的传播时间:
第2页/共115页
第四章 GPS定位的基本原理
◆相对定位。确定同步跟踪相同的GPS信号的若干台 接收机之间的相对位置的方法。可以消除许多相同或 相近的误差,定位精度较高。但其缺点是外业组织实 施较为困难,数据处理更为烦琐。在大地测量、工程 测量、地壳形变监测等精密定位领域内得到广泛的应 用。
在绝对定位和相对定位中,又都包含静 态定位和动态定位两种方式。为缩短观测时 间,提供作业效率,近年来发展了一些快速 定位方法,如准动态相对定位法和快速静态 相对定位法等。
第9页/共115页
第四章 GPS定位的基本原理
◆根据载波相位观测观测得出的伪距 载波相位观测值:测量接收机接收到的、具有多
普勒频移的载波信号,与接收机产生的参考载波信号 之间的相位差。
载波的波长远小于码的波 长,在分辨率相同(1%)的情况 下,载波相位的观测精度远较 码相位的观测精度为高。对于 L1和L2载波,其波长分别为 0.19m和0.24m,则相应的观测 精度为1.9mm和2.4mm。
i p1
c(
i p1
trop
ion )
由式()、()和式()可得
于是由式()可得
i p1
(T
)
p1(Tp1) i (T i )
f
(Tp1
Ti)
f
•
i p1
第19页/共115页
(4.2.11)
第四章 GPS定位的基本原理
式()中的τ是在卫星钟和接收机钟同步的情况 下,卫星信号的传播时间。由于卫星信号的发射 历元是未知的,因此需要根据已知的观测历元tp1 (顾及对流层和电离层延迟改正)按下式计算信 号的传播时间:
第2页/共115页
第四章 GPS定位的基本原理
◆相对定位。确定同步跟踪相同的GPS信号的若干台 接收机之间的相对位置的方法。可以消除许多相同或 相近的误差,定位精度较高。但其缺点是外业组织实 施较为困难,数据处理更为烦琐。在大地测量、工程 测量、地壳形变监测等精密定位领域内得到广泛的应 用。
在绝对定位和相对定位中,又都包含静 态定位和动态定位两种方式。为缩短观测时 间,提供作业效率,近年来发展了一些快速 定位方法,如准动态相对定位法和快速静态 相对定位法等。
第9页/共115页
第四章 GPS定位的基本原理
◆根据载波相位观测观测得出的伪距 载波相位观测值:测量接收机接收到的、具有多
普勒频移的载波信号,与接收机产生的参考载波信号 之间的相位差。
载波的波长远小于码的波 长,在分辨率相同(1%)的情况 下,载波相位的观测精度远较 码相位的观测精度为高。对于 L1和L2载波,其波长分别为 0.19m和0.24m,则相应的观测 精度为1.9mm和2.4mm。
i p1
c(
i p1
trop
ion )
由式()、()和式()可得
GPS卫星定位的基本原理PPT教案

依次将N0的每一组合作为已知值,重复进行 平差计算。使估值的验后平差或方差和为最小 的一组N0 ,即为最佳估值。
第44页/共50页
快速确定整周未知数法(续)
▪ 利用这种方法进行短基线定位时,利用 双频接收机只须观测一分钟即可确定整 周未知数
▪ 此方法已在快速静态定位中得到了广泛 应用
第45页/共50页
在计算中整周未知数采用整周值并视为已知数 ,以求得基线向量的最后值。
第38页/共50页
经典方法—实数解
▪ 基线较长时采用这种方法。 ▪ 具体步骤类似整数解方法,区别在于解得的整周未知数是一个实
数。
第39页/共50页
经典方法的不足
❖ 采用经典方法时,需要较长的观测时间,影响了作业效率,所以只有 在高精度定位领域中才应用
dT — 接收机时钟相对于GPS时间系统的时间偏差 (接收机钟差)
第16页/共50页
伪距测量的原理(续)
T ( R ) t( S ) ( R S ) ( R S ) ( R S ) [ S t( S )][ R T ( R )] ( R S ) (dt dT )
伪噪声码的真 实传播时间
无线电接收机或卫星 P
d1 d2
d3
▪ 无线电导航定位 C ▪ 卫星激光测距定位
A
B 无线电发射台或激光测距仪 ➢ 两条边可确定P点坐标
第4页/共50页
GPS卫星定位的基本原理
❖ 应用测距交会的原理,利用三颗以上卫星的已 知空间位置交会出地面未知点(用户接收机) 的位置。
第5页/共50页
GPS卫星定位的基本原理
卫星到接收天线的距离(包含 电离层、对流层的误差):
C( R S )
卫星到接收天线的“伪距(pseudorange)”:P C
第44页/共50页
快速确定整周未知数法(续)
▪ 利用这种方法进行短基线定位时,利用 双频接收机只须观测一分钟即可确定整 周未知数
▪ 此方法已在快速静态定位中得到了广泛 应用
第45页/共50页
在计算中整周未知数采用整周值并视为已知数 ,以求得基线向量的最后值。
第38页/共50页
经典方法—实数解
▪ 基线较长时采用这种方法。 ▪ 具体步骤类似整数解方法,区别在于解得的整周未知数是一个实
数。
第39页/共50页
经典方法的不足
❖ 采用经典方法时,需要较长的观测时间,影响了作业效率,所以只有 在高精度定位领域中才应用
dT — 接收机时钟相对于GPS时间系统的时间偏差 (接收机钟差)
第16页/共50页
伪距测量的原理(续)
T ( R ) t( S ) ( R S ) ( R S ) ( R S ) [ S t( S )][ R T ( R )] ( R S ) (dt dT )
伪噪声码的真 实传播时间
无线电接收机或卫星 P
d1 d2
d3
▪ 无线电导航定位 C ▪ 卫星激光测距定位
A
B 无线电发射台或激光测距仪 ➢ 两条边可确定P点坐标
第4页/共50页
GPS卫星定位的基本原理
❖ 应用测距交会的原理,利用三颗以上卫星的已 知空间位置交会出地面未知点(用户接收机) 的位置。
第5页/共50页
GPS卫星定位的基本原理
卫星到接收天线的距离(包含 电离层、对流层的误差):
C( R S )
卫星到接收天线的“伪距(pseudorange)”:P C
GPS伪距测量定位PPT教案

摄站 263527.298 -2207773.569 4449316.624 4000175.637 0.108 3.38
GPS 263528.064 -2207864.644 4449241.169 4000227.385 0.115 3.38
GPS 263529.088 -2207980.555 4449130.077 4000293.189 0.086 3.38
根据矩阵平差原理
GuT Gu X (t) GuT Au S (t) P(t)
求得用户在时元t的位置矩阵
X (t) (GuT Gu )1GuT Au S (t) P(t) (5.1.13)
式(5.1.13)为GPS伪距单点被动式定位的三维位 置方程。依此可以解算出用户在时元t的三维坐标 和用户时钟偏差。
对L1而言,可达160m,对L2而言,则达270m; dtrop——对流层引起的距离偏差,它随着用户高程
及其气象要素的不同而变化。
第8页/共50页
P j X j (t) Xu (t) 2 Y j (t) Yu (t) 2 Z j (t) Zu (t) 2 1/2
C(dt
j
dT )
e j1X u (t) e j2Yu (t) e j3Zu (t) Bu (5.1.11) e j1X j (t) ej2Yj (t) e j3Z j (t) Bj Pj (t)
式(5.1.11)为被动式定位的基本方程。
第15页/共50页
当j=1,2,3,4时,则有如(5.1.11)式的4个线性方程, 其矩阵形式如下:
dj ion
dj trop
Xj(t), Yj(t), Zj(t)——第j颗GPS卫星在时元t的三维坐标, 它们可依导航电文提供的GPS星历算得,即为已知 数;