《自动控制原理》卢京潮主编课后习题答案西北工业大学出版社
《自动控制原理》-卢京潮主编-西北工业大学(清华大学)-第四章习题及答案
根轨迹如图解 4-5 所示。
4-6 直升机静稳定性不好,需要加控制装置改善性能。如图 4-23 所示是加入镇定控制 回路的直升机俯仰控制系统结构图。直升机的动态特性可用传递函数
G0 (s)
=
1(0 s + 0.5) (s + 1)(s − 0.4)2
表示。
70
图 4-23 直升机俯仰控制系统结构图
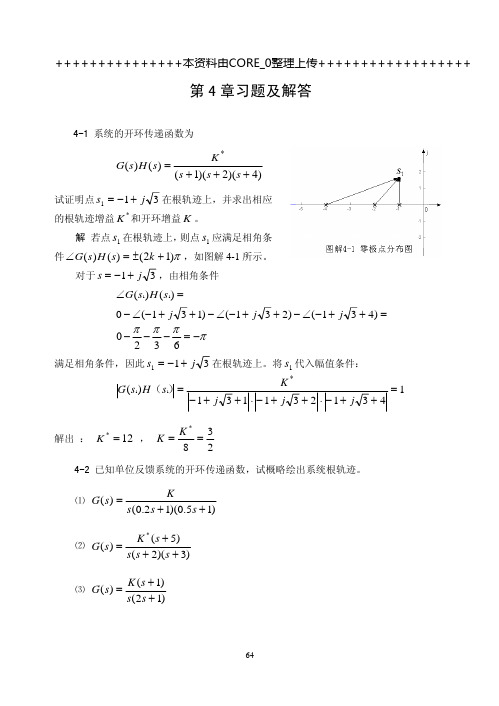
解 若点 s1 在根轨迹上,则点 s1 应满足相角条 件 ∠G(s)H (s) = ±(2k + 1)π ,如图解 4-1 所示。
对于 s = −1 + j 3 ,由相角条件
∠G(s1)H (s1) =
0 − ∠(−1 + j 3 + 1) − ∠(−1 + j 3 + 2) − ∠(−1 + j 3 + 4) = 0 − π − π − π = −π
essn
=
lim
s→0
s
⋅Φ
en
(
s)
⋅
E
(s)
=
lim
s→0
s
⋅
−G0 ⋅ 1+ G0
K1(s +1)
s+9 ⋅ K1(s +1)
s+9
⋅1 s
=
lim
−10K1 ⋅ (s + 0.5)
K1 =1.9
= − 0.868
s→0 (s + 9)(s − 0.4)2 +10K1(s + 0.5)
71
4-7 单位反馈系统的开环传递函数为
(1)画出俯仰控制系统的根轨迹。
(2)当 K1 = 1.9 时,确定对阵风扰动 Td (s) = 1 s 的稳态误差。
(完整版)自动控制原理课后习题答案
第一章引论1-1 试描述自动控制系统基本组成,并比较开环控制系统和闭环控制系统的特点。
答:自动控制系统一般都是反馈控制系统,主要由控制装置、被控部分、测量元件组成。
控制装置是由具有一定职能的各种基本元件组成的,按其职能分,主要有给定元件、比较元件、校正元件和放大元件。
如下图所示为自动控制系统的基本组成。
开环控制系统是指控制器与被控对象之间只有顺向作用,而没有反向联系的控制过程。
此时,系统构成没有传感器对输出信号的检测部分。
开环控制的特点是:输出不影响输入,结构简单,通常容易实现;系统的精度与组成的元器件精度密切相关;系统的稳定性不是主要问题;系统的控制精度取决于系统事先的调整精度,对于工作过程中受到的扰动或特性参数的变化无法自动补偿。
闭环控制的特点是:输出影响输入,即通过传感器检测输出信号,然后将此信号与输入信号比较,再将其偏差送入控制器,所以能削弱或抑制干扰;可由低精度元件组成高精度系统。
闭环系统与开环系统比较的关键,是在于其结构有无反馈环节。
1-2 请说明自动控制系统的基本性能要求。
答:自动控制系统的基本要求概括来讲,就是要求系统具有稳定性、快速性和准确性。
稳定性是对系统的基本要求,不稳定的系统不能实现预定任务。
稳定性通常由系统的结构决定与外界因素无关。
对恒值系统,要求当系统受到扰动后,经过一定时间的调整能够回到原来的期望值(例如恒温控制系统)。
对随动系统,被控制量始终跟踪参量的变化(例如炮轰飞机装置)。
快速性是对过渡过程的形式和快慢提出要求,因此快速性一般也称为动态特性。
在系统稳定的前提下,希望过渡过程进行得越快越好,但如果要求过渡过程时间很短,可能使动态误差过大,合理的设计应该兼顾这两方面的要求。
准确性用稳态误差来衡量。
在给定输入信号作用下,当系统达到稳态后,其实际输出与所期望的输出之差叫做给定稳态误差。
显然,这种误差越小,表示系统的精度越高,准确性越好。
当准确性与快速性有矛盾时,应兼顾这两方面的要求。
《自动控制原理》5章课后习题参考答案.

+
1(
10000(6
.311
2e +=
S S S G
1001.0(11.0(1(1.0(d +++=
S S S S S G 61
.054
.0154.0,
11(2
2
=+==+=
K K
A ω
ωω010
s
900.257.3180 2.16rad
tg ωωω----∙︒=-=,(
(
5
.1,
(5
(6 (7
5.12
K增大和T减少
((1(1(1m K
K s s Ts Ts K
s T s K
Φ=
≈
+++++
K
T m 21=
ζ ,不变(稳定裕度不变
2
22
(12(121b n ωωξξ=-+
-+
5.13
11=+=
p
ssr K e 35
.01
12
416==
=
v
ssr K e %
8.4%100%2
1=⨯=--ξ
πξ
σe 05
.006.13
==≈
ቤተ መጻሕፍቲ ባይዱεξ
ω,S t n s s
rad n n c 8.2707.0707.02=∙=ωωω=0
63
=γdB K g s rad g ∞=∞=ω0,1==r r M ωs
rad n b 4==ωω0
1
1
11006
.787.53.841001.01001.0180180=-=∙-=-+-=----tg
自动控制原理完整版课后习题答案

1 请解释下列名字术语:自动控制系统、受控对象、扰动、给定值、参考输入、反馈。
解:自动控制系统:能够实现自动控制任务的系统,由控制装置与被控对象组成;受控对象:要求实现自动控制的机器、设备或生产过程扰动:扰动是一种对系统的输出产生不利影响的信号。
如果扰动产生在系统内部称为内扰;扰动产生在系统外部,则称为外扰。
外扰是系统的输入量。
给定值:受控对象的物理量在控制系统中应保持的期望值参考输入即为给定值。
反馈:将系统的输出量馈送到参考输入端,并与参考输入进行比较的过程。
2 请说明自动控制系统的基本组成部分。
解:作为一个完整的控制系统,应该由如下几个部分组成:①被控对象:所谓被控对象就是整个控制系统的控制对象;②执行部件:根据所接收到的相关信号,使得被控对象产生相应的动作;常用的执行元件有阀、电动机、液压马达等。
③给定元件:给定元件的职能就是给出与期望的被控量相对应的系统输入量(即参考量);④比较元件:把测量元件检测到的被控量的实际值与给定元件给出的参考值进行比较,求出它们之间的偏差。
常用的比较元件有差动放大器、机械差动装置和电桥等。
⑤测量反馈元件:该元部件的职能就是测量被控制的物理量,如果这个物理量是非电量,一般需要将其转换成为电量。
常用的测量元部件有测速发电机、热电偶、各种传感器等;⑥放大元件:将比较元件给出的偏差进行放大,用来推动执行元件去控制被控对象。
如电压偏差信号,可用电子管、晶体管、集成电路、晶闸管等组成的电压放大器和功率放大级加以放大。
⑦校正元件:亦称补偿元件,它是结构或参数便于调整的元件,用串联或反馈的方式连接在系统中,用以改善系统的性能。
常用的校正元件有电阻、电容组成的无源或有源网络,它们与原系统串联或与原系统构成一个内反馈系统。
3 请说出什么是反馈控制系统,开环控制系统和闭环控制系统各有什么优缺点?解:反馈控制系统即闭环控制系统,在一个控制系统,将系统的输出量通过某测量机构对其进行实时测量,并将该测量值与输入量进行比较,形成一个反馈通道,从而形成一个封闭的控制系统;开环系统优点:结构简单,缺点:控制的精度较差;闭环控制系统优点:控制精度高,缺点:结构复杂、设计分析麻烦,制造成本高。
《自动控制原理》卢京潮主编课后习题答案西北工业大学出版社
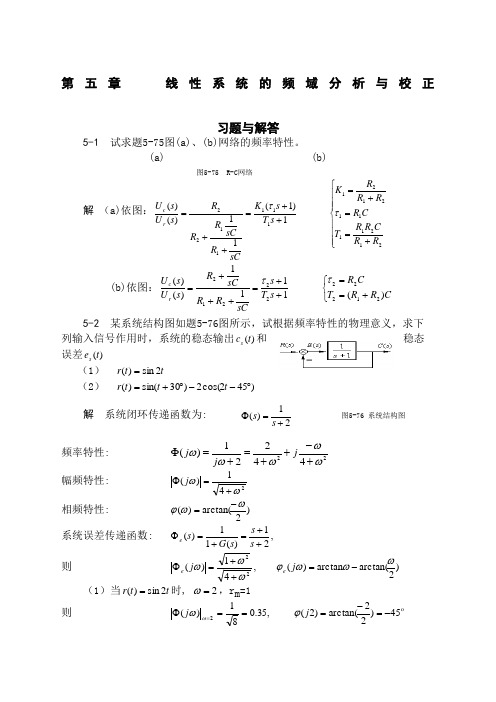
第五章 线性系统的频域分析与校正习题与解答5-1 试求题5-75图(a)、(b)网络的频率特性。
(a) (b)图5-75 R-C 网络解 (a)依图:⎪⎪⎪⎩⎪⎪⎪⎨⎧+==+=++=++=2121111212111111221)1(11)()(R R C R R T C R RR R K s T s K sC R sC R R R s U s U r c ττ (b)依图:⎩⎨⎧+==++=+++=C R R T CR s T s sCR R sC R s U s U r c)(1111)()(2122222212ττ 5-2 某系统结构图如题5-76图所示,试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出)(t c s 和稳态误差)(t e s(1) t t r 2sin )(=(2) )452cos(2)30sin()(︒--︒+=t t t r 解 系统闭环传递函数为: 21)(+=Φs s 图5-76 系统结构图 频率特性: 2244221)(ωωωωω+-++=+=Φj j j 幅频特性: 241)(ωω+=Φj相频特性: )2arctan()(ωωϕ-=系统误差传递函数: ,21)(11)(++=+=Φs s s G s e 则 )2arctan(arctan )(,41)(22ωωωϕωωω-=++=Φj j e e(1)当t t r 2sin )(=时, 2=ω,r m =1 则 ,35.081)(2==Φ=ωωj ο45)22arctan()2(-=-=j ϕ(2) 当 )452cos(2)30sin()(︒--︒+=t t t r 时: ⎩⎨⎧====2,21,12211m m r r ωω5-3 若系统单位阶跃响应 试求系统频率特性。
解 ss R s s s s s ss C 1)(,)9)(4(3698.048.11)(=++=+++-= 则 )9)(4(36)()()(++=Φ=s s s s R s C 频率特性为 )9)(4(36)(++=Φωωωj j j5-4 绘制下列传递函数的幅相曲线:解 ()()()12G j K j K e j ==-+ωωπ幅频特性如图解5-4(a)。
自动控制原理课后习题答案第一章
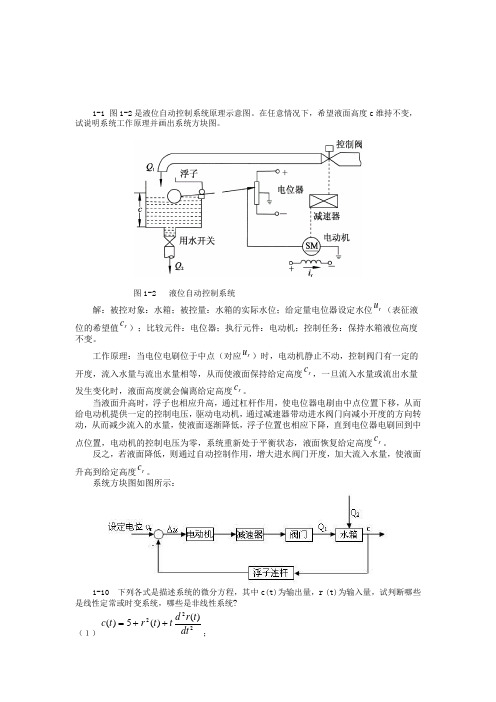
1-1 图1-2是液位自动控制系统原理示意图。
在任意情况下,希望液面高度c 维持不变,试说明系统工作原理并画出系统方块图。
图1-2 液位自动控制系统解:被控对象:水箱;被控量:水箱的实际水位;给定量电位器设定水位r u (表征液位的希望值r c );比较元件:电位器;执行元件:电动机;控制任务:保持水箱液位高度不变。
工作原理:当电位电刷位于中点(对应r u )时,电动机静止不动,控制阀门有一定的开度,流入水量与流出水量相等,从而使液面保持给定高度r c ,一旦流入水量或流出水量发生变化时,液面高度就会偏离给定高度r c 。
当液面升高时,浮子也相应升高,通过杠杆作用,使电位器电刷由中点位置下移,从而给电动机提供一定的控制电压,驱动电动机,通过减速器带动进水阀门向减小开度的方向转动,从而减少流入的水量,使液面逐渐降低,浮子位置也相应下降,直到电位器电刷回到中点位置,电动机的控制电压为零,系统重新处于平衡状态,液面恢复给定高度r c 。
反之,若液面降低,则通过自动控制作用,增大进水阀门开度,加大流入水量,使液面升高到给定高度r c。
系统方块图如图所示:1-10 下列各式是描述系统的微分方程,其中c(t)为输出量,r (t)为输入量,试判断哪些是线性定常或时变系统,哪些是非线性系统? (1)222)()(5)(dt t r d t t r t c ++=;(2))()(8)(6)(3)(2233t r t c dt t dc dt t c d dt t c d =+++; (3)dt t dr t r t c dt t dc t )(3)()()(+=+; (4)5cos )()(+=t t r t c ω; (5)⎰∞-++=t d r dt t dr t r t c ττ)(5)(6)(3)(;(6))()(2t r t c =;(7)⎪⎩⎪⎨⎧≥<=.6),(6,0)(t t r t t c解:(1)因为c(t)的表达式中包含变量的二次项2()r t ,所以该系统为非线性系统。
自动控制原理卢京潮主编课后习题答案西北工业大学出版社

自动控制原理卢京潮主编课后习题答案西北工业大学出版社SANY标准化小组 #QS8QHH-HHGX8Q8-GNHHJ8-HHMHGN#第五章 线性系统的频域分析与校正习题与解答5-1 试求题5-75图(a)、(b)网络的频率特性。
(a) (b)图5-75 R-C 网络解 (a)依图:⎪⎪⎪⎩⎪⎪⎪⎨⎧+==+=++=++=2121111212111111221)1(11)()(R R C R R T C R RR R K s T s K sC R sC R R R s U s U r c ττ (b)依图:⎩⎨⎧+==++=+++=C R R T CR s T s sCR R sC R s U s U r c)(1111)()(2122222212ττ 5-2 某系统结构图如题5-76图所示,试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出)(t c s 和稳态误差)(t e s(1) t t r 2sin )(=(2) )452cos(2)30sin()(︒--︒+=t t t r 解 系统闭环传递函数为: 21)(+=Φs s 图5-76 系统结构图 频率特性: 2244221)(ωωωωω+-++=+=Φj j j 幅频特性: 241)(ωω+=Φj相频特性: )2arctan()(ωωϕ-=系统误差传递函数: ,21)(11)(++=+=Φs s s G s e 则 )2arctan(arctan )(,41)(22ωωωϕωωω-=++=Φj j e e(1)当t t r 2sin )(=时, 2=ω,r m =1则 ,35.081)(2==Φ=ωωj 45)22arctan()2(-=-=j ϕ (2) 当 )452cos(2)30sin()(︒--︒+=t t t r 时: ⎩⎨⎧====2,21,12211m m r r ωω5-3 若系统单位阶跃响应 试求系统频率特性。
自动控制原理课后习题答案第一章
1-1 图1-2是液位自动控制系统原理示意图。
在任意情况下,希望液面高度c 维持不变,试说明系统工作原理并画出系统方块图。
图1-2 液位自动控制系统解:被控对象:水箱;被控量:水箱的实际水位;给定量电位器设定水位r u (表征液位的希望值r c );比较元件:电位器;执行元件:电动机;控制任务:保持水箱液位高度不变。
工作原理:当电位电刷位于中点(对应r u )时,电动机静止不动,控制阀门有一定的开度,流入水量与流出水量相等,从而使液面保持给定高度r c ,一旦流入水量或流出水量发生变化时,液面高度就会偏离给定高度r c 。
当液面升高时,浮子也相应升高,通过杠杆作用,使电位器电刷由中点位置下移,从而给电动机提供一定的控制电压,驱动电动机,通过减速器带动进水阀门向减小开度的方向转动,从而减少流入的水量,使液面逐渐降低,浮子位置也相应下降,直到电位器电刷回到中点位置,电动机的控制电压为零,系统重新处于平衡状态,液面恢复给定高度r c 。
反之,若液面降低,则通过自动控制作用,增大进水阀门开度,加大流入水量,使液面升高到给定高度r c。
系统方块图如图所示:1-10 下列各式是描述系统的微分方程,其中c(t)为输出量,r (t)为输入量,试判断哪些是线性定常或时变系统,哪些是非线性系统? (1)222)()(5)(dt t r d t t r t c ++=;(2))()(8)(6)(3)(2233t r t c dt t dc dt t c d dt t c d =+++; (3)dt t dr t r t c dt t dc t )(3)()()(+=+; (4)5cos )()(+=t t r t c ω; (5)⎰∞-++=t d r dt t dr t r t c ττ)(5)(6)(3)(;(6))()(2t r t c =;(7)⎪⎩⎪⎨⎧≥<=.6),(6,0)(t t r t t c解:(1)因为c(t)的表达式中包含变量的二次项2()r t ,所以该系统为非线性系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五章 线性系统的频域分析与校正习题与解答5-1 试求题5-75图(a)、(b)网络的频率特性。
(a) (b)图5-75 R-C 网络解 (a)依图:⎪⎪⎪⎩⎪⎪⎪⎨⎧+==+=++=++=2121111212111111221)1(11)()(R R C R R T C R RR R K s T s K sC R sC R R R s U s U r c ττ (b)依图:⎩⎨⎧+==++=+++=C R R T CR s T s sCR R sC R s U s U r c)(1111)()(2122222212ττ 5-2 某系统结构图如题5-76图所示,试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出)(t c s 和稳态误差)(t e s(1) t t r 2sin )(=(2) )452cos(2)30sin()(︒--︒+=t t t r 解 系统闭环传递函数为: 21)(+=Φs s 图5-76 系统结构图 频率特性: 2244221)(ωωωωω+-++=+=Φj j j 幅频特性: 241)(ωω+=Φj相频特性: )2arctan()(ωωϕ-=系统误差传递函数: ,21)(11)(++=+=Φs s s G s e 则 )2arctan(arctan )(,41)(22ωωωϕωωω-=++=Φj j e e(1)当t t r 2sin )(=时, 2=ω,r m =1 则 ,35.081)(2==Φ=ωωj 45)22arctan()2(-=-=j ϕ(2) 当 )452cos(2)30sin()(︒--︒+=t t t r 时: ⎩⎨⎧====2,21,12211m m r r ωω5-3 若系统单位阶跃响应 试求系统频率特性。
解 ss R s s s s s ss C 1)(,)9)(4(3698.048.11)(=++=+++-= 则 )9)(4(36)()()(++=Φ=s s s s R s C 频率特性为 )9)(4(36)(++=Φωωωj j j5-4 绘制下列传递函数的幅相曲线:解 ()()()12G j K j K e j ==-+ωωπ幅频特性如图解5-4(a)。
幅频特性如图解5-4(b)。
()()()()33332G j K j K e j ωωωπ==- 图解5-4幅频特性如图解5-4(c)。
5-5 已知系统开环传递函数试分别计算 5.0=ω 和2=ω 时开环频率特性的幅值)(ωA 和相角)(ωϕ。
解 )5.01)((21(10)()(2ωωωωωωj j j j H j G +-+=计算可得 ⎩⎨⎧︒-==435.153)5.0(8885.17)5.0(ϕA ⎩⎨⎧︒-==53.327)2(3835.0)2(ϕA5-6 试绘制下列传递函数的幅相曲线。
(1) G s s s ()()()=++52181(2) G s s s ()()=+1012解 (1) G j ()()()ωωω=-+511610222取ω为不同值进行计算并描点画图,可以作出准确图形 三个特殊点: ① ω=0时, 00)(,5)(=∠=ωωj G j G ② ω=时, ︒-=∠=90)(,2)(ωωj G j G③ ω=∞时, 0180)(,0)(-=∠=ωωj G j G幅相特性曲线如图解5-6(1)所示。
图解5-6(1)Nyquist 图 图解5-6(2) Nyquist 图(2) G j ()ωωω=+10122两个特殊点: ① ω=0时, G j G j (),()ωω=∞∠=-1800 ② ω=∞时, G j G j (),()ωω=∠=-0900幅相特性曲线如图解5-6(2)所示。
5-7 已知系统开环传递函数 )1()1()(12++-=s T s s T K s G ; 0,,21>T T K当1=ω时,︒-=∠180)(ωj G ,5.0)(=ωj G ;当输入为单位速度信号时,系统的稳态误差1。
试写出系统开环频率特性表达式)(ωj G 。
解 )1()1()(12+--=s T s s T K s G先绘制)1()1()(120+-=s T s s T K s G 的幅相曲线,然后顺时针转180°即可得到)(ωj G 幅相曲线。
)(0s G 的零极点分布图及幅相曲线分别如图解5-7(a)、(b)所示。
)(s G 的幅相曲线如图解5-7(c)所示。
依题意有: K s sG K s v ==→)(lim 0, 11==K e ssv ,因此1=K 。
另有: 5.01)(1)(11)1)(1()1(22212221212112=++=++--=+--=T T T T T T j T T T jT jT j G 可得: 22=T ,5.0121==T T ,1=K 。
所以: )5.01(21)(ωωωωj j j j G +-=5-8 已知系统开环传递函数试概略绘制系统开环幅相频率特性曲线。
解 )(ωj G 的零极点分布图如图解5 -8(a)所示。
∞→=0ω变化时,有分析s 平面各零极点矢量随∞→=0ω的变化趋势,可以绘出开环幅相曲线如图解5-8(b)所示。
5-9 绘制下列传递函数的渐近对数幅频特性曲线。
(1) G s s s ()()()=++22181;(2) G s s s s ()()()=++20011012;(3) G s s s s s s ()(.)(.)()=++++40050212(4) G s s s s s s s ()()()()()=+++++20316142510122(5) G s s s s s s s ()(.)()()=+++++801142522解 (1) G s s s ()()()=++22181图解5-9(1) Bode 图 Nyquist 图(2) G s s s s ()()()=++20011012图解5-9(2) Bode 图 Nyquist 图(3) )1)(12.0()12(100)1)(2.0()5.0(40)(22++++=++++=s s s s s s s s s s s G图解5-9(3) Bode 图 Nyquist图(4) G s s s s s s s ()()()()()=+++++20316142510122图解5-9(4) Bode 图 Nyquist 图(5) ⎥⎥⎦⎤⎢⎢⎣⎡++⎪⎭⎫ ⎝⎛++⎪⎭⎫⎝⎛+=+++++125451)1(11.01258.0)254)(1()1.0(8)(2222s s s s s s s s s s s s s G 图解5-9(5) Bode 图 Nyquist图5-10 若传递函数式中,)(0s G 为)(s G 中,除比例和积分两种环节外的部分。
试证式中,1ω为近似对数幅频特性曲线最左端直线(或其延长线)与0dB 线交点的频率,如图5-77所示。
证 依题意,G(s)近似对数频率曲线最左端直线(或其延长线)对应的传递函数为v sK。
题意即要证明v sK的对数幅频曲线与0db 交点处的频率值ω11=K v 。
因此,令0)(lg 20=vj K ω,可得 K v ω11=, 故 ωω111vv K K =∴=,,证毕。
5-11 三个最小相角系统传递函数的近似对数幅频特性曲线分别如图5-78(a)、(b)和(c)所示。
要求: (1)写出对应的传递函数;(2)概略绘制对应的对数相频特性曲线。
图 5-78 5-11题图解 (a) 依图可写出:G s K ss()()()=++ωω1211其中参数:db L K 40)(lg 20==ω,100=K则: G s s s ()()()=++100111112ωω图解5-11(a ) Bode 图 Nyquist 图(b) 依图可写出 G s K ss s()()()=++ωω12211K C ==ωωω021图解5-11(b ) Bode 图 Nyquist 图(c) G s K ss s ()()()=⋅++ωω2311图解5-11(c ) Bode 图 Nyquist 图 5-12 已知)(1s G 、)(2s G 和)(3s G 均为最小相角传递函数,其近似对数幅频特性曲线如图5-79所示。
试概略绘制传递函数 的对数幅频、对数相频和幅相特性曲线。
解:(1)L K 11204511()lg .ω== 则: G s K 11()= (2) G s K s s 22081()(.)=+ 20201022lg /lgK K ω== , K 21= (3)L K K 333202001110()lg lg .ωω===(4)G s G G G G 412231()=+将G G G 123,,代入得:G s s s 41801251()(.)=+对数频率特性曲线如图解5-12(a)所示,幅相特性曲线如图解5-12(b)所示:图解5-12 (a) Bode 图 (b) Nyquist 图 5-13 试根据奈氏判据,判断题5-80图(1)~(10)所示曲线对应闭环系统的稳定性。
已知曲线(1)~(10)对应的开环传递函数如下(按自左至右顺序)。
:)1)(1()(++=s Ts s Ks G ; )0,(>T K(1)2=T 时,K 值的范围; (2)10=K 时,T 值的范围; (3)T K ,值的范围。
解 [])()()1)(1()1()1()1)(1()(2222ωωωωωωωωωωωY X T T j T K jT j j K j G +=++-++-=++=令 0)(=ωY ,解出T1=ω,代入)(ωX 表达式并令其绝对值小于1得出: T T K +<<10 或 110-<<K T(1)2=T 时,230<<K ;(2)10=K 时,910<<T ;(3)T K ,值的范围如图解5-14中阴影部分所示。
5-15 已知系统开环传递函数试概略绘制幅相特性曲线,并根据奈氏判据判定闭环系统的稳定性。
解 作出系统开环零极点分布图如图解5-15(a )所示。
)(ωj G 的起点、终点为:)(ωj G 与实轴的交点: 令[]0)(Im =ωj G 可解出代入实部 []037.4)(Re 0-=ωj G概略绘制幅相特性曲线如图解5-15(b )所示。
根据奈氏判据有 所以闭环系统不稳定。
5-16 某系统的结构图和开环幅相曲线如图5-81 (a)、(b)所示。
图中 试判断闭环系统稳定性,并决定闭环特征方程正实部根个数。
解 内回路开环传递函数:G s G s H s s s 0241()()()()==+大致画出G j 0()ω的幅相曲线如图解5-16所示。