履带车辆车身振动特性分析
履带车辆悬挂系统磁流变阻尼振动控制分析
L R w s a uae t h p t f i aue odsr c x i t n . i lt no mi cie Q a l ltdwi tei u xmesrdra uf e ct i s Smuai f e — t cc h n os a e ao o s a v
关 键词 :振 动与 波 ;悬挂 系 统 ; 流 变 阻尼 器 ;半主 动控制 磁
中图分类号 : J1 .3 T 8 03 2
文献标志码 : A
文章编号 : 0019 (06 0 — 6—5 10 — 3 20 )60 50 0 9
An l s s o he Vi r to nt o fTr c e h ce S s e i n a y i n t b a i n Co r lo a k d Ve i l u p nso S s e Usng M a n t r e l g c lFl i m p r y t m i g e o h o o i a u d Da e
a d t e a ay i o c i ef r ewa i e ,s o n y s m i c i e c n r lc n r p a e a t e c n r 1 n h n l ss fa t o c sg v n h wi g wh e — t o to a e lc c i o to . v a v v S mu a i n r s l h w h t ma n t r e l gc l f i a e n t e s mi c ie v b a i n c n r l f i l t e u t s o t a g e o h o o ia l d d mp r i h e — t i r t o to o s u a v o o s s e s n s s e o r c e e i e i f a i l . u p n i y t m f ta k d v h c s e sb e o l
履带车辆主动悬挂系统振动控制的研究的开题报告

履带车辆主动悬挂系统振动控制的研究的开题报告一、研究背景随着科技的不断发展,履带车辆作为一种重要的军事装备,其性能得到了不断提升。
然而,在履带车辆的行驶过程中,由于路面的不平坦性以及车辆的大型化,车辆振动问题成为制约其性能提升的瓶颈。
因此,如何控制履带车辆的振动,提高其行驶稳定性和行驶舒适性,成为了当前研究的热点问题。
二、研究目的和意义本研究旨在通过研究履带车辆的主动悬挂系统振动控制方法,提高履带车辆的行驶稳定性和行驶舒适性。
具体研究目的如下:1. 建立履带车辆主动悬挂系统的数学模型,分析其振动特性;2. 设计、优化主动悬挂系统的控制算法,将振动信号作为控制量,通过外部制动器、阀门等调节悬挂系统的阻尼、刚度等参数;3. 在实际测试中验证主动悬挂系统的有效性,并与传统被动悬挂系统做对比。
三、研究内容和方法本研究将重点研究履带车辆主动悬挂系统振动控制方法。
具体研究内容和方法如下:1. 建立履带车辆主动悬挂系统的数学模型,包括车辆悬挂系统、路面不平度和悬挂系统控制器等;2. 基于状态空间模型,设计悬挂系统的控制算法,并将其实现在实际测试平台中;3. 在实际测试平台上进行振动控制实验,并记录车体振动的加速度、速度等参数;4. 将主动悬挂系统的效果与传统被动悬挂系统进行对比,验证主动悬挂系统的有效性。
四、研究预期成果1. 建立履带车辆主动悬挂系统的数学模型,分析其振动特性;2. 设计、优化主动悬挂系统的控制算法,提高车辆的行驶稳定性和行驶舒适性;3. 在实际测试中,验证主动悬挂系统在振动控制方面的有效性,并证明其优于传统被动悬挂系统。
五、研究难点和解决方案1. 履带车辆悬挂系统具有非线性、时变特性,建立其数学模型时需要综合考虑各种因素的影响。
解决方案:借助系统辨识方法,对履带车辆悬挂系统进行建模,并通过试验数据对模型进行验证,提高模型的准确性。
2. 履带车辆主动悬挂系统的控制算法需要结合悬挂系统的特性进行优化,并考虑现实控制条件的限制。
车辆蛇形运动稳定性及运行振动分析

车辆蛇形运动稳定性及运行振动分析车辆蛇形运动稳定性及运行振动分析1、车辆蛇形运动稳定性具有一定他面形状的轨道轮对即使沿着平直轨道运转,受到微小激扰后就会产生一种振幅保持现状或继续增大直道轮缘受到约束的特有运动,此时轮对向前滚动一面横向往摆动,一面又绕铅锤中心来回转动,其轮对中心轨迹呈波浪形,称蛇形运动,当激扰消失而剧烈的蛇形运动不能收敛时,则称蛇行失稳。
表面上轮对并未受到钢轨的纵向或横向位移激振,实际上这是一种自激振动,试论对对钢轨的相对运动产生了内部激振力,由这种激振力维持轮对相对运动,由机车牵引力提供的非振动能量由于轮轨间的自激机制转换为蛇形运动的能量。
当车辆运行到某速度时车辆系统中的阻尼无法消耗这种能量。
蛇形运动就失稳,该速度就称为蛇形失稳临界速度,轮轨间的蛇形运动是由等效斜率的踏面产生的,这种踏面避免轮对的轮缘始终贴靠在轨侧运动而采取的自动取中措施,正是这种取中的能力在一定条件下转化为失稳的动力。
在纯粘着滚动假设条件下,由锥形踏面轮对与钢轨间的几何关系可以推导出一个无约束自由轮对的蛇形运动频率W w及波长L w的公式,之后又推出了轴距为2L w的刚性二轴结构转向架的蛇形波长L t及蛇形频率W t的相关公式。
W w = 2πv/L w,L w =2πbr×1/λe2, W t =2πv/L t,影响蛇形运动因素很多,主要有以下几个,1轮对定位刚度,2轮对踏面等效斜率λe,3蠕滑系数,4转向架固定轴距,5中央悬挂装置。
2、车辆运行振动分析车辆垂直振动,城市轨道车辆的转向架通常采用二系悬挂,力求在有限的空间获得柔性,研究表明,车辆的两个自由度简化的垂直振动系统有两个自振频率,低频P1与总静挠度f st有关,而高频P2除与静挠度有关外,还与刚度及车体质量和簧上部分质量之比有关。
低频对应的振动型为车体与构架做相同振动,而高频振动对应车体与构架做反向振动,车体以低频振动为主,而构架则以高频振动为主干线客车及地铁轻轨车辆的两系垂直总挠度通常均在160mm以上。
履带车辆支重轮粘弹阻尼减振设计与分析
机 械 设 计 与 制 造
Ma c hi n e r y De s i g n & Ma n u f a c t ur e 2 2 7
履 带车辆 支重轮 粘弹 阻尼减振设计与分析
燕碧娟, 孙大刚, 宋 勇, 章
( 太 原科 技 大 学 机 械工 程 学 院 , 山西 太原
( Me c h a n i c a l E n g i n e e r i n g C o l l e g e , T a i y u a n U n i v e r s i t y o f S c i e n c e a n d T e c h n o l o g y , S h a n x i T a i y u a n 0 3 0 0 2 4 , C h i n a )
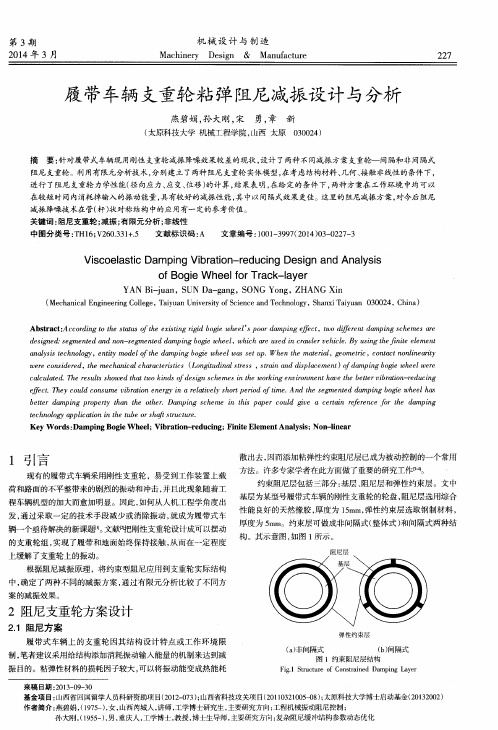
Ab s t r a c t : A c c o r d i n g t o t h e s t a t u s o ft h e e x i s t i n g r i g i d b o ie g w h e e l ’ S p o o r d a m p i n g e f f e c t , t w o d f i f e r e n t d a m p i n g s c h e m e s o 1 e
a n a l y s i s t e c h n o l o g y , e n t i t y m o d e l o ft h e d a m p i n g b o i g e w h e e l
s e t u p . Wh e n t h e m te a r i l, a g e o et m r i c , c o n t a c t n o n l i n e ri a t y
轨道车辆的振动与稳定性分析

轨道车辆的振动与稳定性分析在现代社会,轨道交通成为人们出行的主要方式之一。
无论是地铁、电车还是高铁,轨道车辆的振动与稳定性都是需要重视和研究的重要问题。
本文将就轨道车辆的振动与稳定性进行分析。
首先,我们需要了解轨道车辆振动的原因。
轨道车辆的振动主要来自两个方面:一是轨道对车辆的激励作用,二是车辆本身的特性。
对于激励作用而言,轨道的不平整度是主要因素之一。
轨道不平整度会导致车轮与轨道之间的相对运动,从而引发车辆振动。
此外,轨道的弯曲也会对车辆产生侧向力,引起车辆摆动。
而对于车辆本身的特性来说,车轮与轨道之间的间隙、车厢的刚度以及悬挂系统的设计等都会对车辆的振动特性产生影响。
接下来,我们来讨论轨道车辆的稳定性。
轨道车辆的稳定性可以分为纵向稳定性和横向稳定性。
纵向稳定性主要指的是车辆在加速和减速过程中的稳定性。
在车辆加速时,车辆前部会受到向后的加速度作用,而车后部受到向前的加速度作用。
这种加速度差异会导致车辆发生摆动,从而影响乘客的乘坐体验。
因此,要保证车辆的纵向稳定性,就需要在车辆设计和悬挂系统设计上做出相应的优化。
横向稳定性主要指的是车辆在转弯过程中的稳定性。
在车辆转弯时,车轮受到的侧向力会引起车辆向外侧偏移。
为了保证车辆的横向稳定性,需要合理设计轮轨间的阻尼和刚度,并确保车轮与轨道的紧密接触。
当考虑到轨道车辆的振动和稳定性问题时,除了得出基本的原理和模型外,还需要进行相应的数值模拟和实验验证。
数值模拟可以通过建立车辆-轨道系统的动力学模型,了解振动特性和稳定性。
模拟结果可以用来指导实际车辆的设计和改进。
而实验验证则可以通过在实际轨道上运行车辆,并通过传感器记录振动数据来验证模拟结果的准确性。
除了振动和稳定性方面的研究外,还有其他与轨道车辆相关的问题值得关注。
例如,轨道车辆的噪音问题也是一个重要的研究领域。
高速列车在高速运行时会产生较大的噪音,影响乘客的舒适感。
因此,减少轨道车辆的噪音也是车辆设计和运营的一个重要目标。
履带式车辆多自由度阻尼特性分析
7 \ l
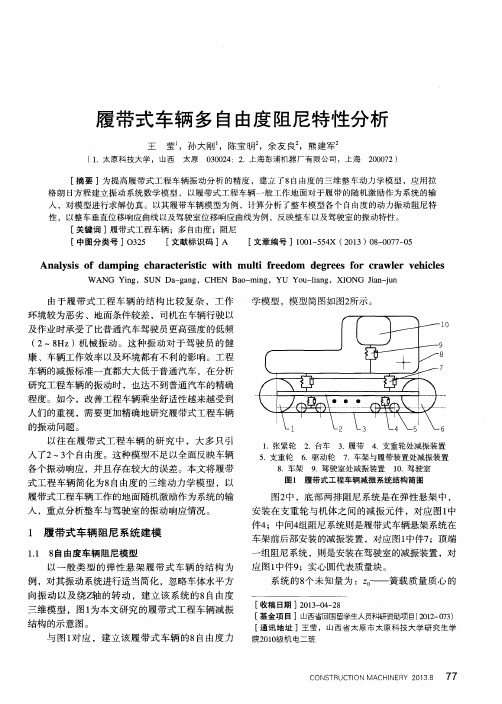
4 .支重 轮 处 减 振 装 置
入 了2 —3 个 自由度 。这 种模 型 不 足 以全 面 反 映车辆 各 个 振动 响应 ,并 且存 在较 大 的误 差 。本文 将履 带
5 .支重 轮
6 .驱动轮
7 . 车架与履带装置处减振装 置
式工程车辆简化为8 自由度的三维动力学模型 ,以
入 ,对模型进行求解仿真 。以其履带车辆模型为例 ,计算分析了整车模型各个 自由度的动力振动阻尼特
性 ,以整车垂 直 位移 响应 曲线 以及 驾驶 室 位移 响应 曲线 为例 ,反 映整 车 以及驾 驶 室的振 动特 性 。
[ 关键词 ] 履带式工程车辆 ;多 自由度 ;阻尼
[ 中图分 类号 ] 0 3 2 5 [ 文 献标 识码 ] A [ 文章 编号 ]1 0 0 1 — 5 5 4 X( 2 0 1 3 ) 0 8 — 0 0 7 7 — 0 5
三维模型 ,图l 为本文研究的履带式工程车辆减振
结 构 的示 意 图 。 与 图l 对 应 ,建 立 该 履 带 式 车 辆 的8自由度 力
[ 通讯 地址 ]王莹 ,山西省太原 市太原科技 大学研究 生学 院2 0 1 0 级 机 电二 班
C ON S T R U C T I O N MA C H I N E R Y 2 0 1 3 8 77
WANG Y i n g ,S U N Da — g a n g ,CHE N Ba o — mi n g ,YU Yo u - l i a n g ,XI O NG J i a n - j u n
由于 履 带 式 工 程 车 辆 的结 构 比 较 复 杂 ,工 作 环 境 较为 恶劣 、地面 条件 较差 ,司机 在车 辆行 驶 以 及 作业 时承受 了 比普通 汽车驾驶 员 更 高强 度 的低 频
履带车辆动力传动系统扭振的测试与分析
( 9 )
考虑到 系统的 品质 因数为 Q = l 1 2 2 j , 并将 式 ( 8 ) 代 入式 ( 9 ) , 可以得到 叼的取值 。
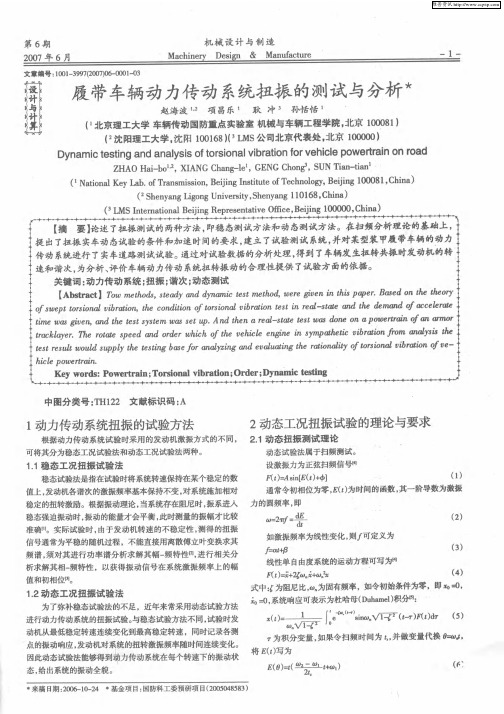
图1 各测点布置 图
h 7 ‘ 。 赤
态试验 的最小加速时间
t> 二 面
( 1 O )
F i g . 1 T h e me a s u in r g p o i n t d i s t r i b u t i o n p l a n
反之 , 根据对偏移 量的要求 , 给 出 叼的最佳值 , 则 可给 出动
表 2测点布置及 转速比
T a b . 2 L a y o u t a n d me a s u r i n g p oi n t t h an t h e s p e e d
一6 0 (
业 L i
nl
机 械 设 计 与 制 造
一3一
谐次成份包括0 . 5 、 1 、 1 . 5 、 3 、 4 . 5 、 6 等, 各挡分析结果 中包含 的上
动系统的发动机工作范 围是 给定 的 ,所 以最大的扫频范 围也是 盘 ) 。测 点在传动 系统 中的布置如图 1 所示 , 各测点说 明如表 2
给定 的 , 即翻
( 8 ) 所示 。
式中 n 岫, , 为发动机 的最低 、 最高稳 定转 速。定义 叼为综合各 种参数影 响的归一化指标 I 卵 I : 垃
券
( 1 3 )
式 中 为发动机转速 , 为发动机谐次 , 以发动机转速为瀑布图 的纵坐标 , 即以发动机转速进行跟踪 , 得到的是发动机的谐次。 在 以其它轴 的转速跟踪 时, 可以得到相对 于该转速的谐次 , 即
大马力履带推土机暴露环境下振噪特性试验研究
34 *彳;仏紜 2019 7
第50卷丨第7期 总第549期
表2传感器具体安装位置
测点编号
传感器安装位置
测试振动方向
P1 座椅
x-、y-、z-
P2 底板凸台
X-.Y-.Z-
P3 发动机罩
x+、y+、z-
托链轮(左侧从机头至尾部
P4
x+、y+、z-
第2个)
支重轮(左侧从机头至尾部
P5
X+、Y+、Z-
图1试验测点位置 综合推土机的具体构造和实际测试条件,在整机坐 标系下选择如图1所示的试验测点位置。其中测点P1、 P2、P3、P4和P5为振动信号测试点,依次表示座椅、底 板、发动机罩、托链轮和支重轮;测点P6和P7为驾驶室 内、外噪声信号测试点。底板选择与之刚性连接的凸台安 装传感器,其余测点均可直接通过磁座安装传感器,传感 器具体安装位置如表2所示。座椅及其底板、托链轮的传 感器安装见图2、图3所示。 1.2.2试验过程 具体试验过程为: (1)检测试验仪器能否正常运作,设置数据采集器的
大马力履带推土机具有较高的土石方作业效率,被 广泛运用在大型建筑工程领域叫然而,大马力履带推 土机结构复杂,工作环境恶劣,作业负荷大,表现岀与中 小机型截然不同的整机动态特性。另外,日趋严苛的动 态指标已经成为发达国家对大型工程机械进口的技术 壁垒,要求其在全生命周期内满足相应标准叫例如,CE 认证规定,需采用最新的ISO标准对产品的振动指标做 岀评价。因此,大马力推土机的振噪问题是亟待深入研 究的一类课题。
度传感器、噪声传感器和磁座,具体如表1所示。其中,数
表1试验仪器
序号
名称
型号
数量
I
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
a n d me t h o d,t h e c a l c u l a t i o n r e s u l t s we r e c o mp a r e d wi t h t h e t e s t r e s u l t s .T h e r e s u l t s s h o w t h a t t h e e s t bl a i s h e d in f i t e e l e —
me n t mo d e l i s a c c u r a t e,a n d t h e v i b r a t i o n d i a g r a ms o b t a i n e d b y t h e e s t a b l i s h e d i f n i t e e l e me n t mo d e l c a n d e d u c e t h e b o d y ’ S
2 0 1 3年 1 2月 第3 8卷 第 1 2期
润滑N ENGI NEERI NG
De c .2 01 3
Vo 】 . 3 8 No .1 2
D OI :1 0 . 3 9 6 9 / j . i s s n . 0 2 5 4— 0 1 5 0 . 2 0 1 3 . 1 2 . 0 1 5
mo d e l s .Th e b o d y ’ S v i b r a t i o n mo d a l wa s c a l c u l a t e d u s i n g Na s t r a n s o f t wa r e b a s e d o n in f i t e e l e me n t mo d a l a n a l y s i s ’ S t h e o r y
履 带 车 辆 车 身 振 动特 性 分 析
马 星 国 田 丰 尤 小梅 叶 明 龚 雪莲
( 1 . 沈 阳理工大学机械工程学 院 辽 宁沈 阳 1 1 0 1 5 9 ;
2 .北京北方车辆集 团有限公司
北京 1 0 0 0 7 2 )
摘 要 :为研 究 履带 车辆 车 身 的振 动 特性 ,分 别建 立 车 架有 限元 模 型 和车 壳 有 限元 模 型 ,并 合 并 成 为 完 整 车身 的有
中 图分 类 号 :T B 5 3 3 . 2 文 献标 识码 :A 文章 编 号 : 0 2 5 4— 0 1 5 0( 2 0 1 3 )1 2— 0 6 5— 5
An a l y s i s o n Bo d y Vi b r a t i o n Cha r a c t e r s o f Tr a c k e d Ve h i c l e
Ab s t r a c t : F o r s t u d y i n g t h e v i b r a t i o n c h a r a c t e is r t i c s o f t r a c k e d v e h i c l e ’ S b o d y,t h e in f i t e e l e me n t mo d e l s o f t h e f r a me a n d s h e l l we r e e s t a b l i s h e d r e s p e c t i v e l y, a n d a c o mp l e t e b o d y ’ s in f i t e e l e me n t mo d e l wa s e s t a b l i s h e d b y me r g i n g t h e t wo
限元模型。基于有限元模态分析理论 和方法 ,采用 N a s t r a n软件计算得到车身 的振动模态 ,将其 同实验模态 对 比分析 。 结果表明,建立的有限元模型是准确 的,可以根据该模 型计算得到的振型图推断车身实际的振动情况 ,并根据模态分析
的结 果对 车 身 进行 设 计 及 优化 。 关键 词 :模 态 分 析 ;履 带 车辆 ;振 动 特性 ;车身
Ma Xi n g g u o Ti a n F en g Yo u Xi a o me i Ye Mi n g Gon g Xu e l i a n
( 1 . S c h o o l o f Me c h a n i c a l E n g i n e e r i n g ,S h e n y a n g L i g o n g U n i v e r s i t y ,S h e n y a n g L i a o n i n g 1 1 0 1 5 9, C h i n a ; 2 . B e i j i n g N o r t h V e h i c l e G r o u p C o r p o r a t i o n ,B e i j i n g 1 0 0 0 7 2, C h i n a )