基于Labview的智能小车控制平台
基于LabVIEW的智能WiFi小车控制系统设计

基于LabVIEW 的智能WiFi 小车控制系统设计DOI :10.19557/ki.1001-9944.2020.12.005谢檬,曾泽辉,张安莉,石卓勇(西安交通大学城市学院电气与信息工程系,西安710018)摘要:针对无线智能小车控距较短,无法自动避障且功能单一等问题,设计了智能WiFi 小车虚拟控制系统。
以STM32F105单片机为主控芯片,构建智能小车的硬件系统,上位机采用LabVIEW 搭建控制平台,WiFi 模块完成数据的适时通信。
经过测试,该系统可以控制智能小车完成基本的运行功能;LED 灯光控制;云台舵机旋转角度范围0°~180°和35°~90°;超声波测距范围0~15cm ,精度±0.5cm 。
控制系统便捷地控制小车运行轨迹,有效降低了道路事故风险,提高行车效率,方便人们的生活。
关键词:控制系统;LabVIEW ;智能小车;WiFi ;STM32F105中图分类号:TP391.9;TP242.6文献标志码:A文章编号:1001⁃9944(2020)12⁃0022⁃04Design of Control System of Intelligent WiFi Car Based on LabVIEWXIE Meng ,ZENG Ze ⁃hui ,ZHANG An ⁃li ,SHI Zhuo ⁃yong(Department of Electrical and Information Engineering ,Xi ’an Jiaotong University City College ,Xi ’an 710018,China )Abstract :Aiming at the problems such as short control distance ,unable to avoid obstacles automatically and single function ,intelligent WiFi car virtual control system was designed.This system takes STM32F105as the main control chip of the hardware system ,the upper computer USES LabVIEW to build the control platform ,and the WiFi module to complete the data communication.The hardware system of intelligent trolley is built by using STM32F105single chip microcomputer as main control chip.The upper computer uses the LabVIEW to build the control platform ,and the WiFi module completes the data real ⁃time communication.After testing ,the system can control the intelligent car to complete the basic operation function ;the car LED light control ;pan tilt steering gear rotation angle range of 0°~180°and 35°~90°;the ultrasonic ranging range of 0~15cm ,the accuracy of ±0.5cm.The control system convenientlycontrols the track of the car ,effectively reduces the risk of road accident ,improves the driving efficiency ,and facili ⁃tates people ’s life.Key words :control system ;LabVIEW ;smart car ;WiFi ;STM32F105收稿日期:2020-08-29;修订日期:2020-10-07基金项目:教育部产学合作协同育人项目(201902028026);陕西省职业教育“1+X ”证书制度专项项目(ZJX02001)作者简介:谢檬(1982—),女,硕士,副教授,研究方向为测控技术与仪器及智能仪器的设计。
使用LabVIEW进行自动驾驶系统的控制与优化

使用LabVIEW进行自动驾驶系统的控制与优化自动驾驶技术是当今汽车行业的热门话题之一。
随着科技的不断发展,自动驾驶系统正逐渐从概念走向实际应用。
而LabVIEW作为一款强大的工程软件平台,为开发和控制自动驾驶系统提供了极大的便利。
本文将介绍使用LabVIEW进行自动驾驶系统的控制与优化,并探讨其在未来的应用前景。
一、LabVIEW在自动驾驶系统中的应用自动驾驶系统依赖于各种传感器和控制器的实时数据输入和处理。
而LabVIEW作为一种图形化编程语言,可以简化代码的编写和调试过程,使开发人员能够更加高效地实现自动驾驶系统的控制和优化。
LabVIEW提供了丰富的工具和函数库,用于处理传感器数据、图像处理、路径规划、控制制动和加速等。
开发人员可以通过简单的拖拽和连接操作,构建自己的程序框图,并通过LabVIEW提供的模块进行数据处理和算法优化。
同时,LabVIEW还支持与汽车电子系统的通信接口,实现对车辆的实时控制。
二、LabVIEW在自动驾驶系统中的控制模块1. 传感器数据处理模块自动驾驶系统需要依靠多种传感器如雷达、激光雷达、摄像头等来获取车辆周围环境的信息。
LabVIEW提供了丰富的IVI和VISA函数库,用于实现传感器数据的读取和解析。
开发人员可以利用这些函数库,快速地从传感器中获取、处理和分析数据。
2. 图像处理模块自动驾驶系统的核心组成部分之一是图像处理模块。
通过摄像头获取到的图像数据,需要通过算法和处理流程进行分析,提取出路面交通标志、行人、车道线等关键信息。
LabVIEW提供了强大的图像处理工具包,例如特征提取、边缘检测和目标识别等,能够帮助开发人员实现复杂的图像处理操作。
3. 路径规划模块自动驾驶系统需要能够根据当前环境和路况,规划最优的行驶路径。
LabVIEW提供了多种路径规划算法,例如A*算法、Dijkstra算法和优化算法等,能够帮助开发人员实现自动驾驶系统的路径规划功能。
4. 控制策略模块自动驾驶系统的控制策略需要根据传感器数据和路径规划结果,进行实时的决策和控制。
基于LabVIEW的车身控制器功能测试系统
应用领域:车身控制与总线通信基于LabVIEW的车身控制器功能测试系统作者:姜飞荣公司:联创汽车电子有限公司Tel: (021) 5050 9800Email:@基于LabVIEW的车身控制器功能测试系统作者:姜飞荣公司:联创汽车电子有限公司应用领域:产品测试挑战:在较短时间内开发一套高性价比车身控制器功能测试系统,模拟实车电气负载和其它控制器单元,测试车身控制器各个功能是否满足设计需求,包括雨刮系统、门锁系统、车窗系统、内灯光系统、外灯光系统、辅助系统、仪表及防盗安全系统,并对测试数据记录,存储和自动报表生成,提供良好人机界面,为车身控制器功能测试和整车集成测试提供支持。
应用方案:使用National Instruments公司专用板卡及LabVIEW 8.2,开发一套基于Labview的可靠、高性价比的车身控制器功能测试系统。
使用的产品:LabVIEW 8.2;数字I/O卡;数据采集卡;定时计数器;USB-LIN;PCI-CAN/XS2介绍:随着汽车电子技术发展,对汽车零部件尤其是电子控制器测试要求越来越高,功能越来越复杂而庞大,如何验证零部件是否达到设计需求,需要一整套的测试设备和实验方法。
相对动力总成系统,车身控制系统功能更显得灵活多变,需要的测试项目也更多、更杂,为使测试更加全面、具体和便利,结合Labcar测试,我们搭建了一套基于Labview的车身控制器功能测试系统,进行包括雨刮系统、门锁系统、车窗系统、内灯光系统、外灯光系统、辅助系统、仪表及防盗安全等系统测试。
测试系统特点1.电压可调。
可自动进行9~16V电压输出遍历测试,高、低电压模拟(0~30V)测试及发动机启动电压模拟测试。
2.故障模拟。
CAN/LIN/Kline对地、对电源短路;CAN/LIN/Kline短路;CAN终端电阻变化;CAN+、CAN-短路;碰撞模拟;惯性开关断开模拟等。
3.可进行手动、自动功能测试,提高测试效率,可靠性高。
LabVIEW在汽车电子控制系统中的应用

LabVIEW在汽车电子控制系统中的应用随着汽车工业的快速发展,汽车电子控制系统在其中起到了至关重要的作用。
而在这一系统中,LabVIEW作为一种强大的可视化编程环境,被广泛应用于汽车电子控制系统的设计、开发和测试中。
本文将探讨LabVIEW在汽车电子控制系统中的应用,并展示其在提高控制系统效率、可靠性和安全性等方面的优势。
1. LabVIEW在汽车电子控制系统开发中的应用LabVIEW在汽车电子控制系统开发中发挥着重要的作用。
首先,LabVIEW提供了丰富的图形化编程工具和开发环境,使得开发人员能够快速构建汽车电子控制系统的原型和模型。
其次,LabVIEW拥有强大的数据采集和信号处理功能,可以方便地获取和分析车辆传感器的数据,以及实时监测和控制车辆各个部件的状态。
此外,LabVIEW还支持与其他硬件设备或软件系统的无缝集成,从而实现了与其他系统的数据交换和协同工作。
2. LabVIEW在汽车电子控制系统测试中的应用LabVIEW在汽车电子控制系统测试中也具有重要作用。
通过LabVIEW提供的虚拟仪器和测试工具,开发人员可以进行各种类型的测试,包括静态测试、动态测试和边界测试等。
这些测试可以用来验证汽车电子控制系统的性能、稳定性和可靠性,并检查是否符合安全标准和法规要求。
此外,LabVIEW还支持对测试数据的实时监测、记录和分析,帮助开发人员及时发现潜在问题并进行优化和改进。
3. LabVIEW在汽车电子控制系统故障诊断中的应用在实际使用中,汽车电子控制系统可能会出现各种故障和异常情况。
LabVIEW的优势在于其丰富的故障诊断和排错功能。
开发人员可以利用LabVIEW的图形化编程环境,构建多种故障诊断模型和算法,通过对车辆传感器数据和控制信号的分析,快速、准确地识别和排除故障,提高车辆的可靠性和安全性。
4. LabVIEW在汽车电子控制系统数据分析中的应用随着汽车电子控制系统中数据量的不断增加,数据分析的重要性也日益凸显。
基于LABVIEW的温湿度采集智能小车论文
毕业论文基于LABVIEW的温湿度采集智能小车摘要本文设计了一个车载无线温湿度测量系统。
该设计主要以STC89C52RC单片机为核心,NRF24L01和无线模块为通信基础,LN298驱动模块驱动直流电机,HC-SR04超声波模块和28BYJ-48步进电机结合实现小车自动避障功能,DHT11模块采集环境温湿度,成功实现了智能小车采集不同地点温湿度的功能,并将温湿度数据通过无线模块发给LABVIEW做的上位机界面显示。
关键词:无线温湿度测量;NRF24L01;DHT11;LABVIEWABSTRACTThis paper designed a remote wireless humidity measuring system.This design mainly STC89C52RC microcontroller as the core,NRF2401 wireless module for communication module,LN298 driver module,HC-SR04 ultrasonic module and 28BYJ-48 stepper motor combine to achieve the car automatic obstacle avoidance function.DHT11acquisition environment humidity. The successful implementation of the radio control car collection of different locations of moisture..And the temperature and humidity data via wireless module to the PC interface of LABVIEW do show.Key words:Wireless temperature and humidity measurement ; NRF24L01;DHT11;LABVIEW前言随着科技的不断发展,智能化成为现代生活的潮流趋势,是日后发展的方向。
基于LabVIEW的全线控纯电动汽车测控平台开发

基于LabVIEW的全线控纯电动汽车测控平台开发随着电动汽车的快速发展,对于开发高效、精准的测控平台也有了越来越高的要求。
而基于LabVIEW的全线控纯电动汽车测控平台的开发,将成为解决这一需求的重要手段。
全线控纯电动汽车测控平台是一种应用LabVIEW技术实现的高精度、全功能的汽车测控系统。
通过该系统,用户可以实现对纯电动汽车的全线控制,同时可以采集、处理、分析汽车各个传感器的信号数据,可针对不同模块进行定制化开发。
在开发LabVIEW全线控纯电动汽车测控平台之前,首先需要进行硬件选型。
需要选用能够满足各种传感器信号采集和控制要求的处理器、电源、IO模块以及信号放大器等硬件设备。
其中,处理器需具备高效率、高稳定性、高性能和低功耗的特点。
而电源则需要具备足够的电流、电压和温度稳定性,以确保各个模块的正常工作。
此外,信号放大器和IO模块也需要选用可靠的品牌和模块。
然后,需要进行软件开发和编写。
基于LabVIEW平台开发全线控纯电动汽车测控平台时,用户可以使用LabVIEW开发环境来完成编程工作。
开发团队可以通过编写各种VI程序,实现异步采样、控制、数据处理、数据显示、存储等功能。
而在VI程序的编写过程中,可以使用许多LabVIEW自带的功能模块,例如图像处理、信号处理、操作系统接口等。
在程序编写完成后,需要进行测试和调试。
测试工作需要对各个模块进行实时采集和精确分析,并通过LabVIEW开发环境的帮助,对系统进行逐步调试,直至达到预期的控制和测量效果。
而在调试过程中,可以使用LabVIEW平台提供的自动化测试和文件记录功能,帮助用户优化和改善控制程序和信号处理算法的效率和精度。
总之,基于LabVIEW的全线控纯电动汽车测控平台开发是一项技术难度高、工作量大的系统工程,需要依靠多个方面的专业技术知识来进行开发和实施。
但是,通过灵活运用LabVIEW平台所提供的强大开发工具,可以实现对纯电动汽车全线控制及各类传感器数据的实时采集、处理和存储,为汽车生产和运营管理提供支持和保障。
基于LabVIEW和PID控制器的自主移动小车控制系统的实现
基于LabVIEW和PID控制器的自主移动小车控制系统的实
现
石伟
【期刊名称】《工业控制计算机》
【年(卷),期】2013(026)004
【摘要】对自主移动小车按照预设轨迹移动的制系统进行了数学建模,提出了基于LabVIEW的PID控制器来实现对小车位置的控制,研究表明,基于LabVIEW的PID 控制器能够有效控制小车的移动,控制精度良好,有实际应用价值.
【总页数】2页(P75,77)
【作者】石伟
【作者单位】南京航空航天大学,江苏南京210016;威斯康星大学斯托特分校,美国威斯康星54751
【正文语种】中文
【相关文献】
1.基于LabVIEW的自主巡航与遥控双功能智能小车研发 [J], 罗培键;戴博聪
2.基于LabVIEW平台的运料小车PLC控制系统设计 [J], 陈云云
3.移动监测小车的无线控制系统的研究与实现 [J], 刘魁;苏志远;周晓光
4.基于LabVIEW的智能探测小车设计与实现 [J], 王帆;李敏;
5.基于LabVIEW的智能WiFi小车控制系统设计 [J], 谢檬;曾泽辉;张安莉;石卓勇因版权原因,仅展示原文概要,查看原文内容请购买。
基于LabVIEW的全线控纯电动汽车测控平台开发
5 结 束 语
O 2 4 6 8 1 O 1 2
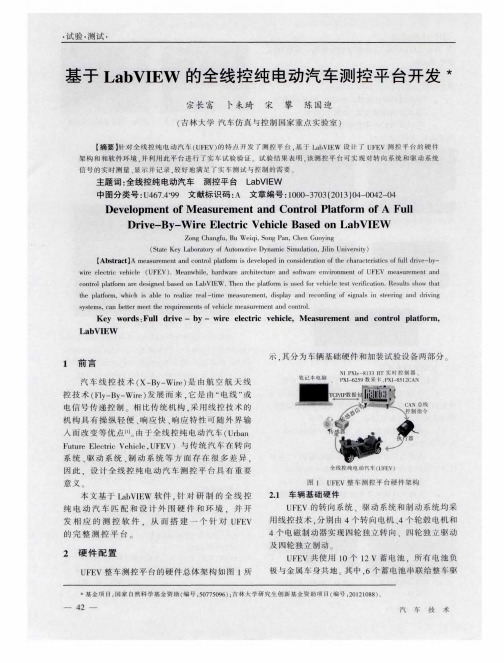
所 研 发 的全 线 控 纯 电 动汽 车 ( U F E V) 的转 向 系 统、 驱 动 系统 、 制动 系 统均 采 用线 控 技 术 , 并 可 实 现 四轮独立 转 向 、 驱 动及 制动 。 因此其 测控 平 台与传 统 车辆 有所 不 同 针对 U F E V特 点设计 了一套 全线 控 纯 电动 汽车 的测控 平 台 .并 利 用此 平 台进行 了实 车 试验 验证 。试 验 结果 表 明 ,该 测控 平 台能够 实现 对
Z h a n g Z h i b o , Yu a n L i n , Xi e Do n g mi n g , G u o Yo n g
( C h i n a A u t o mo t i v e T e c h n o l o g y a n d Re s e a r c h C e n t e r )
由图 8 ~ 图 1 1可看 出 , 在本 次试 验 中 , 轮毂 电 机
的 目标 电流 与 加 速踏 板 的开度 呈 线 性 关 系 : 而 轮 毂 电机 的实 际 电流 噪声 很 大 . 当轮 毂 电 机 的实 际 电 流 经过滤波后 。 与 目标 电 流 的趋 势 和数 值 接 近 : 驱 动 电机的转速变化也较平稳 . 在精确性 、 实 时性 上 满 足样 车 的要求
逞
蛰 煅 曩
痞l O
脚
s
ห้องสมุดไป่ตู้
∞ 踟 ∞ ∞ 加
0
-
5 2 O 2 4 6 8 l 0 1 2 1 4 1 6
—
( c ) 原地转 向
2 0
时间, s
( a ) 滤 波 前
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于Labview的智能小车控制平台摘要:该课程设计是基于Labview的智能汽车控制平台,该平台建立在飞思卡尔单片机及51单片机控制芯片基础上,基于Labview仿真。
采用无线控制小车转向,加速,刹车系统。
该设计是测控专业集单片机控制,电路,软件编程于一体的平台练习,是集测控专业所学的一门综合提高学生素质的课程设计。
关键词:Labview 智能汽车飞思卡尔单片机测控Abstract: the course is designed based on the intelligent vehiclecontrol platform Labview, this platform based on SCM and 51 single-chip microcomputer control freescale Labview, based on the chip. Using radiocontrol car accelerated, braking system, steering. This design is a professional sets single-chip microcomputer control, the control circuit and the software programming in one of the platform, which is a professional knowledge of measurement to improve students' comprehensive quality of the course design.Keywords:intelligent vehicle freescale microcontroller measure-control Labview一、单片机系统的组成1.改装原因:(1):市面上的游戏方向盘都是USB通信协议,用户不了解协议内容,无法用于自己控制要求。
(2):USB通信优势虽然非常明显,但由于其协议复杂,且受其通信距离限制,USB信号一般只能在几米的传输范围内,较串口较短,因此选择了简易可行的串口协议。
2. 设计步骤:(1):了解内部工作及传感原理。
拆开游戏方向盘,结果发现传感原理非常简单,仅靠变阻器和按键传递控制信号。
(2):使用一款自己熟悉的单片机(AT89S52)根据硬件电路接口电路设计自己的硬件控制电路板卡。
其中包括方向盘指挥输入部件和与PC机通信的串口通信模块。
(3):编写自己的用户应用程序,创建自己和PC的通信协议,发挥软件编程的灵活性。
3. 硬件原理图说明:(1):核心控制芯片选用AT89S52,其各接口使用情况如下图所示:0834_DI、0834_DO、0834_CLK、0834_CS 用于AD采样的接口。
图(7)核心控制芯片89S52(2)AD转换及采样接口电路说明:采样电路的等效电路图图所示:图(8)AD转换油门和刹车:注:刹车和油门的机械结构将脚下力转换为对应变阻器的阻止变化,只需采样阻值大小即可判断力的大小。
经测量知:刹力越大,电阻值越小。
图(9)油门和刹车等效图接口3、4之间接到游戏方向盘的刹车控制变阻器两端,相当于接一可变电阻。
接口1、2之间接到游戏方向盘的油门控制变阻器两端,相当于接一可变电阻。
AD_Brake和AD_Thtottle用于AD采样油门和刹车的模拟信号,R18,R19用于采样时分压。
方向盘:方向盘的转向信号仍是模拟信号,用AD采样之后即可判断转动方向及幅度。
接口的1、2、3分别对应于三端滑动变阻器的三个端子。
图(10)方向盘等效电路左转时1、2之间电阻逐渐变小,AD_L的分压将逐渐变大。
右转时2、3之间的电阻逐渐变小,AD_R的分压将逐渐变大。
AD转换电路图:AD芯片使用的是TI公司的一款8位4通道串行AD芯片,正好满足要求。
与单片机的接口为SPI的接口,具体说明和使用请参考芯片资料里的《TLC0834使用范例》文档,也可参考该芯图(11)AD转换电路片厂商提供的技术文档,内含具体操作时序。
图(12)按键电路(3)按键接口硬件说明按键的设计依赖于具体的硬件结构,在此给出说明。
下图为按键的设计原理(并非实际电路),由于游戏方向盘上按键单独设计已经由机械结构确定,故在主控制板上只是留出对应接口(J)即可。
分布在方向盘的各个按键小板原理图如下所示(GND、KEY1…KEYn为留出的插槽)该游戏方向盘上共计有19个用户按键使用(包含最中间的复位按键),具体排列如下。
图(13)按键小板对应于游戏方向盘上5、6、7、8、9、10、11、12和中间的cruise(我们设为复位键)的按键。
见下图:图(13)方向盘按键对应于对应于游戏方向盘上UP、DOWN、LEFT、RIGHT的按键。
见下图:图(14)UP、DOWN、LEFT、RIGHT的按键对应于对应于游戏方向盘上1、2、3、4的按键。
见下图:对应于对应于游戏方向盘上左右两个的按键,在此设为中断按键,方便用于处理实时信息。
见下图:另外由于单片机资源较多,仍有多余的IO口6个,在此引出以便于扩展外部功能。
见下图:(4)振动器驱动硬件电路为增强游戏者的手感,游戏方向盘上有两个振动器,在此给出驱动电路图及说明如下:三级管在此既作为单片机控制的开关,又充当功率放大的角色。
只需给Mor1、Mor2给出高电平即可驱动负载,低电平断开。
图(15)驱动电路(5)在系统编程接口现今单片机一般都支持ISP(在系统编程),这样大大方便了单片机开发用户,在此也引出了ISP的接口规范,供参考如下:该款下载线使用的是网上非常流行的USBASP,支持USB下载和供电双功能,并且可以同时下载AT89s5x和A VR单片机(Atmage16),详细可以参考网上相关资料。
图(16)系统编程图(6)串口通信硬件说明为了满足串口传输的电平规范,在此需要设计电平转换电路,电路原理来源于Maxim公司的max232芯片说明文档。
图(17)串口通信电路选用主要材料清单:注:材料清单中元件除发光二极管以外均要求贴片封装。
型号封装数量厂商说明AT89S52 TQFP44 12 ATMEL 单片机TLC0834 SOP-14 12 TI 8位串行AD 转换芯片MAX232 SOP-16 12 MAXIM 串口电平转换芯片7805(LM7805) TO-220 12 ST 5V电源稳压芯片9013(8050) SOT23 24(30) NPN三极管有极性贴片钽电容(1uF,10uF) 1206 有极性贴片电容二、Labview控制平台的设计1.基本界面组成(1)串口1:用于连接单片机和PC机,作为方向盘数据传送的枢纽。
(2)串口2:用于连接PC机和无线传输模块,主要是给小车发送相关的数据,实时调整小车的状态。
(3)显示控件:本次设计至少需要显示四个参数,方向(Direction)、转角(Angle)、速度(Speed)、刹车(Brake)。
(4)全局变量、美化界面相关控件。
2.串口1的协议:(1)PC机先往51单片机发送字符“1”,作为51单片机开始发送数据的命令。
(2)51单片机发送的一帧数据格式应为:Dx Ax3x2x1 Bx2x1 Tx2x1 S x x x xx:表示数据,范围为0 ~ 256,与ASCII码表一一对应。
(3)D为方向标识符,后面紧跟的数据必须为0或1(对应的十六制数为30H 和31H)。
0为前进,1为后退,默认为0.(4)A为方向标识符,后面紧跟的第一位数是左右转标识符,取值为0或1,为为右转,1为左转。
第二、三位分别为转角(Angle)的十位和个位,取值范围为0 ~ 60。
(5)B为刹车标识符,后面数据的第一、二位分别为刹车(Brake)值的十位和个位,取值范围为0 ~ 30,即把刹车档分为了30档。
(6)T为油门标识符,后面数据的第一、二位分别为速度(Speed)值的个位和小数点后的第一位,取值范围为0.0~ 3.0。
(7)S为传送到小车单片机的标识符,用于PC机识别该信息后向串口2发送由51单片机读取到的AD值。
(8)S后面的数据均由单片机得到的AD值,具体范围见串口2的协议。
3.设计思路根据制定的协议要求:小车发送上来的数据严格遵守一定的数据格式,在实际数据前面都有一个标识符:D为方向,A为转角,B 为刹车,T为油门,因此在Labview中就必须判断发送上来的字符(串口每次只能发送一个字符内容)中是4个的哪一个标识符,后面紧跟的数据便是需要送给程序处理的。
根据以上分析,在Labview的程序设计中采用并行程序的处理方式,判断从串口1送上来的数据应该送到哪个控件上显示,单片机再发送标识符S,PC机收到此信息后便把处理后的数据送到串口2,把相关的数据送到小车上,小车根据收到的信息做出相应的决策。
传送完一帧数据后开始下一帧数据的处理,不断循环执行。
4.界面程序图图(1)串口1和串口2初始化图(2)方向D处理程序图(3)转角A处理程序图(4)刹车B处理程序图(5)油门T和串口2处理程序5.前面板模型图(6)智能小车控制面板显示图三、智能小车的控制原理1. PC机Labview程序与小车通讯协议(1)、方式::PC机Labview程序通过无线串口与小车通讯。
(2)、系统串口协议内容:1、当PC机接到小车单片机发送的信号“1”(数据类型为unsigned char)时,PC机便开始发送一帧数据,此时PC机的Labview程序一次性给小车发送四个数据,发送完毕后直到小车下一次发送回来的信号“1”时才再发数据。
例如发送的数据为:0 35 70 -48分别代表:前进/后退油门刹车方向盘转角(注意顺序不能变)(3)、数据说明如下:前进/后退(DirectionFlag):0表示前进,1表示后退(数据类型为unsignedchar型),只有两种状态。
油门(ThrottleData):数据范围0~127,0表示小车速度为0,127表示速度为 3.0m/s,线性递增(数据类型为unsigned char型,共128档。
刹车(BrakeData):数据范围0~127,0表示未踩刹车板,小车速度为当前速度,127表示刹车板踩到底,小车停止(数据类型为unsigned char型)。
方向盘(AngleData):数据范围-60~60,-60表示小车左转60度,60表示右转60度,即左负右正,0表示正中间,小车未转向(数据类型为char型)。
2. 小车模型(1)小车模型简介模型车尺寸:四轮驱动,长×宽×高为270×170×96(单位:mm)电机参数为:DC 7.2V ND380舵机参数为:IPS017伺服器电池参数为:7.2V 2000mAh(2)核心芯片采用飞思卡尔公司生产的16位单片机mc9s12xs128作为主控芯片。