基于solidworks工业机器人设计
基于SolidWorks的机械式工业机器人末端执行装置的设计与实现

基于SolidWorks的机械式工业机器人末端执行装置的设计与实现作者:朱宏兴王柏森李远航范素香来源:《河南科技》2018年第14期摘要:为解决现有技术中工业机器人末端执行装置结构复杂、生产成本高且通用性较弱等问题,本文设计了一种新型的机械式工业机器人末端执行装置。
该装置能满足工业机器人在单自由度移动下对工作对象抓取移动的要求,操作简单、成本低、通用性强、适应工业生产的不同需求和多种工况下的作业。
关键词:末端执行装置;SolidWorks;三维设计;实体制作中图分类号:TP241;TH164 文献标识码:A 文章编号:1003-5168(2018)14-0030-03 Design and Implementation of the Terminal End-effector ofMechanical Industrial Robot Based on SolidWorksZHU Hongxing WANG Baisen LI Yuanhang FAN Suxiang(North China University of Water Resources and Electric Power,Zhengzhou Henan 450000)Abstract: In order to solve the problems of complex structure, high cost, high maintenance cost and weak generality of the terminal execution device of industrial robot in the existing technology, a new type of mechanical industrial robot terminal execution device was designed in this paper. It could meet the industrial robot in the single degree of freedom of the work of the object to move the request. It was easy to control, simple to operate, low in cost, strong in versatility and widely used, and could adapt to the different needs of industrial production and the operation under a variety of working conditions.Keywords: end-effector;SolidWorks;three-dimensional design;entity production工业机器人末端执行装置安装于机器人手臂末端,直接作用于工作对象。
基于SolidWorks软件对工业机器人机械臂的结构优化设计和受力、模态分析
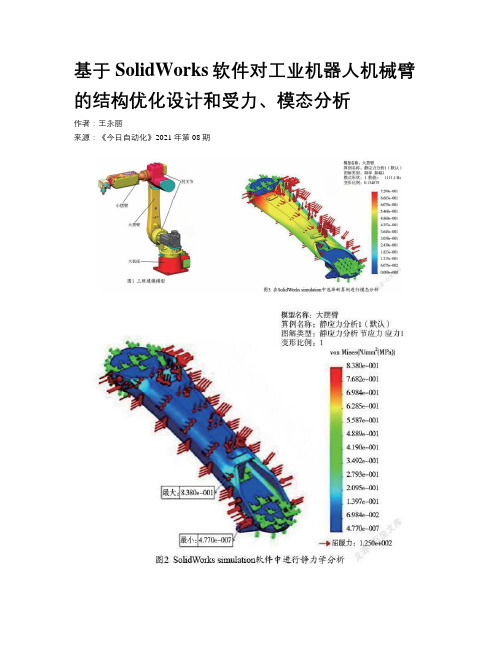
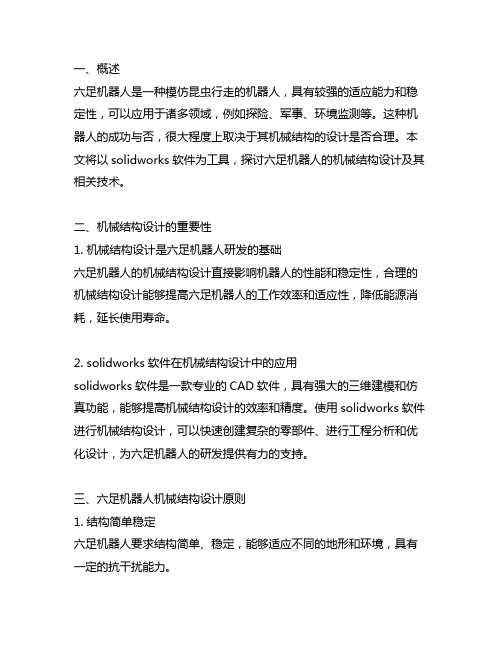
基于SolidWorks软件对工业机器人机械臂的结构优化设计和受力、模态分析作者:王永丽来源:《今日自动化》2021年第08期[摘要]随着现在软件技术的发展,三维建模、仿真软件越来越普及化,SolidWorks软件由其界面操作简单、功能强大被机械设计行业广泛应用,采用SolidWorks软件对某工业机器人机械臂的三维模型结构进行拓扑优化设计,采用SolidWorks simulation软件对机械臂进行静力学、模态仿真分析,几何清理和网格划分,通过计算,设计出较合理的肘关节减速机传动齿轮;达到了工业机器人机械臂高精度柔性运动,机械臂高强度、刚度、最小安全系数和减小应力集中的效果,解决了工业机器人机械臂的优化设计。
[关键词]SolidWorks;工业机器人;机械臂; 仿真分析; 优化设计[中图分类号]V279 [文献标志码]A [文章编号]2095–6487(2021)08–0–03[Abstract]With the development of software technology, three-dimensional modeling and simulation software are becoming more and more popular. SolidWorks software is widely used in mechanical design industry because of its simple interface operation and powerful function. SolidWorks software is used to optimize the topology of the three-dimensional model structure of anindustrial robot manipulator, and SolidWorks simulation software is used to optimize the statics and dynamics of the manipulator Through modal simulation analysis, geometric cleaning and mesh generation, a more reasonable transmission gear of elbow reducer is designed through calculation; It achieves the effect of high-precision flexible motion, high strength, stiffness, minimum safety factor and reducing stress concentration of industrial robot manipulator, and solves the optimization design of industrial robot manipulator.[Keywords]SolidWorks; industrial robot; robot arm; simulation analysis; optimal design工业机器人机械手臂由三部分组成,分别是机械部分、传感部分、控制部分。
利用SOLIDWORKS实现焊接机器人设计和仿真

2014年第12期47焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。
根据国际标准化组织(ISO)工业机器人术语标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机(Manipulator),具有三个或更多可编程的轴,具有生产效率高且产品品质稳定,劳动力成本低廉,操作环境好等优点,主要用于工业自动化领域。
随着社会的发展,我国已经出现了人口老龄化,劳动力成本不断上升。
随着国内外机械行业竞争的不断加剧,对产品的质量要求更严格,焊接方式也急需由传统的手工焊接逐渐由传统的人工焊接转变向机器人焊接。
国外厂商如FANUC、OTC、ABB和KUKA等对焊接机器人的研究较早,已经形成了系列化产品并投放占领大部分的国内外市场份额。
国内在近几年才开始进行机器人技术的研究,起步较晚,机器人的性能和技术都和国外厂商有一定的差距。
因此,国内市场也需要在借鉴国外同类型焊接机器人优点的基础上,立足于现有的加工制造业水平,从解决实际问题的角度出发,研究开发出满足中小企业实际需要的经济型可靠型焊接机器人。
SOLIDWORKS2014是由美国SOLIDWORKS公司研究开发的基于造型的三维机械设计软件,其特点是易学易用,在企业内部推广成本低,SOLIDWORKS Motion是嵌在SOLIDWORKS中的运动仿真模块,依托其强大的运动分析功能,能比较精确地对焊接机器人进行工件运动位置及运动参数的计算,并以动画的形式计算出虚拟现实的动画演示,能很直观地解决六自由度焊接机器人的运动规律问题。
通过建立虚拟仿真环境进行机器人的仿真实验研究,可以大幅度降低实验成本,提高实验效率,在运动状态下进行运动仿真,能有效地检查机器人本体结构设计的合理性等,对实际样机的设计具有重要的参考和指导价值。
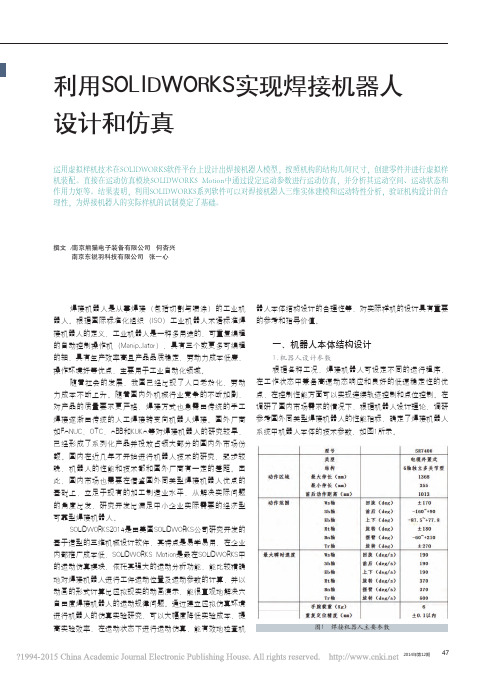
一、机器人本体结构设计1.机器人设计参数根据各种工况,焊接机器人可设定不同的运行程序,在工作状态中兼备高速动态响应和良好的低速稳定性的优点,在控制性能方面可以实现连续轨迹控制和点位控制。
SOLIDWORKS工业机器人数字化建模教程 简介

按住鼠标左键,拖动该按钮到要放置的工具栏上,然后松开鼠标左键
单击对话框中的【确定】按钮
二、工作环境与单位设置
3. 设置单位
1、系统默认的单位为: MMGS (毫米、克、秒)
2、设置单位的操作步骤:
图7 【文档属性】属性管理器的【单位】选项卡
【工具】→ 【选项】命令→ 【系统选项】对话框→ 【文档属性】选项卡→ 选择【单位】选项→ 选择【单位系统】为“MMGS”;在【小数】一栏中设置小数位数→ 【确定】
• 【主页】选项卡中可以打开最近使用过的文档。 • 【主页】选项卡中可以浏览最近的文件夹。 • 【登录】中可以用客户的账号进行云操作等。 • 【学习】选项卡中可以学习SOLIDWORKS提供
的教程、视频等。
一、启动软件与界面介绍
方法二:单击菜单【文件】→【新建】,弹出【新 建】对话框。 方法三:单击【标准】工具栏的【新建】按钮
一、启动软件与界面介绍
新建对话框如图所示
一、启动软件与界面介绍
• 2.新建文件
文件类型
零件 装配启动软件与界面介绍
• 选择新建零件,进入【零件】工作环境,主要的 功能区域如图所示
二、工作环境与单位设置
1. 设置工具栏
设置工具 栏方法
图4 【工具栏】快捷菜单
(1)工具栏区域鼠标右键→ 快捷键菜单单击【自定义】
(2)菜单栏中的【工具】→ 【自定义】
图5【自定义】属性管理器中的【工具】选项卡
二、工作环境与单位设置
2. 设置工具栏命令按钮 设置工具栏中命令按钮的操作步骤:
图6【自定义】属性管理器中的【命令】选项卡
【自定义】属性管理器中的【工具】选项卡中单击【 】选项卡
在【类别】选项组中选择工具栏
六足机器人的机械结构solidworks
一、概述六足机器人是一种模仿昆虫行走的机器人,具有较强的适应能力和稳定性,可以应用于诸多领域,例如探险、军事、环境监测等。
这种机器人的成功与否,很大程度上取决于其机械结构的设计是否合理。
本文将以solidworks软件为工具,探讨六足机器人的机械结构设计及其相关技术。
二、机械结构设计的重要性1. 机械结构设计是六足机器人研发的基础六足机器人的机械结构设计直接影响机器人的性能和稳定性,合理的机械结构设计能够提高六足机器人的工作效率和适应性,降低能源消耗,延长使用寿命。
2. solidworks软件在机械结构设计中的应用solidworks软件是一款专业的CAD软件,具有强大的三维建模和仿真功能,能够提高机械结构设计的效率和精度。
使用solidworks软件进行机械结构设计,可以快速创建复杂的零部件、进行工程分析和优化设计,为六足机器人的研发提供有力的支持。
三、六足机器人机械结构设计原则1. 结构简单稳定六足机器人要求结构简单、稳定,能够适应不同的地形和环境,具有一定的抗干扰能力。
2. 材料选择合理机械结构设计要选用强度高、重量轻的材料,以确保机器人的稳定性和工作寿命。
3. 运动学设计合理机械结构设计要符合六足机器人的运动学要求,确保机器人能够稳定地行走和执行任务。
四、solidworks软件的基本操作1. solidworks软件界面介绍solidworks软件界面清晰简洁,功能区域划分明确,用户可以直观地进行操作。
2. 创建零部件通过solidworks软件可以快速创建各种零部件,并进行参数化设计,便于后续的工程分析和设计优化。
3. 装配零部件solidworks软件提供了强大的装配功能,可以将各个零部件进行组装,检验机械结构的合理性和稳定性。
五、六足机器人机械结构设计实例1. 设计六足机器人的主体结构使用solidworks软件创建六足机器人的主体结构,包括机身、六条腿和相应的连接零部件。
2. 优化机器人的关节结构在solidworks软件中对六足机器人的关节结构进行优化设计,保证机器人能够灵活、稳定地进行运动,并提高机器人的适应能力。
SOLIDWORKS工业机器人数字化建模教程 项目八 机械手臂曲面数字化设计

项目要求
项目实施
3.绘制草图轮廓,并标注尺寸。
操作
草图全部为黑色, 说明完全定义。
草图轮廓并标注尺寸
项目要求
项目实施
二、退出草图绘制模式
单击图形区右上角的按钮
,退出草绘模式。完成“草图2”。
三、生成曲面-基准面2
操作
➢ 选择“FeatureManager设计树 ”中的“草图1”,生成曲面; ➢ 在【平面】属性管理器的【边界实体】选项卡中选择“草图2”。
SOLIDWORKS工业机器人数字化建模教程
项目八 机械手臂曲面数字化设计
项目要求
完成该零件的三维数字化设计
机械手臂曲面
项目要求
项目实施
任务一 基准曲面生成
一、进入草图绘制环境
1. 建立新文件并命名。
2. 确定草图基准面。选择【前视基准面】,进入草图绘制环境。
项目要求
项目实施
二、绘制草图
1. 绘制两条相互垂直中心线。
【平面】属性管理器
生成平面区域曲面2
项目要求
项目实施
任务四 放样生成封闭区域
放样曲面:指通过曲线之间的平滑过渡而生成曲面的方法。 放样曲面主要由放样的轮廓曲线组成,如果有必要可以使用引导线。
放样曲面的方法:
菜单【插入】→【曲面】→【放样曲面】。 单击【曲面】选项卡的【放样曲面】按钮 。 单击【曲面】工具栏的【放样曲面】按钮 。
草图轮廓并标注尺寸
4. 添加几何关系。 ➢添加椭圆的长轴端点为水平。
操作
草图线条都为黑色, 说明完全定义。
添加几何关系后草图完全定义
项目要求
项目实施
5.绘制直线。
绘制直线使草图封闭
二、退出草图绘制模式
工业机器人三维建模(SolidWorks)第4章 工业机器人装配

4.1.2 添加零件
第一种方法为直接导入零部件。 (1)首先导入一个装配体中的固定件。 (2)选择【插入】|【零部件】|【现有零件/装配体】菜单命令或者单击 【装配体】工具栏中的【插入零部件】按钮,系统弹出如右图所示的【插入零 部件】属性管理器。 (3)在【插入零部件】属性管理器中选择【浏览】按钮,系统弹出【打开 】对话框,在该对话框中选择要插入的零件,在对话框右上方可以对零件形成 预览。 (4)打开零件后,鼠标箭头旁会出现一个零件图标。一般固定件放置在原 点,在原点处单击插入该零件,此时特征管理器中的该零件前面会自动加有【 (固定)】标志,表明其已定位。 (5)按照装配的过程,用同样的方法导入其他零件,其他零件可放置在任 意点。
4.1 创建装配体
装配环境下另一个重要概念就是——【约束】。当零件被调入到装 配体中时,除了第一个调入的之外,其它的都没有添加约束,位置处于 任意的【浮动】状态。在装配环境中,处于【浮动】状态的零件可以分 别沿三个坐标轴移动,也可以分别绕三个坐标轴转动,即共有六个自由 度。当给零件添加装配关系后,可消除零件的某些自由度,限制了零件 的某些运动,此种情况称为不完全约束。当添加的配合关系将零件的六 个自由度都消除时,称为完全约束,零件将处于【固定】状态。
4.1.2 添加零件
制作装配体需要按照装配的过程,依次插入相关零件,有多种方法可以将零部件添加到 一个新的或现有的装配体中:
(1)使用【插入零部件】属性管理器。 (2)从任何窗格中的文件探索器拖动。 (3)从一个打开的文件窗口中拖动。 (4)从资源管理器中拖动。 (5)从Internet Explorer中拖动超文本链接。 (6)在装配体中拖动以增加现有零部件的实例。 (7)从任何窗格中的设计库中拖动。 (8)使用【插入智能扣件】命令来添加螺栓、螺钉、螺母、销钉、以及垫圈。
利用SOLIDWORKS实现焊接机器人设计和仿真_何杏兴
2014年第12期47焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。
根据国际标准化组织(ISO)工业机器人术语标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机(Manipulator),具有三个或更多可编程的轴,具有生产效率高且产品品质稳定,劳动力成本低廉,操作环境好等优点,主要用于工业自动化领域。
随着社会的发展,我国已经出现了人口老龄化,劳动力成本不断上升。
随着国内外机械行业竞争的不断加剧,对产品的质量要求更严格,焊接方式也急需由传统的手工焊接逐渐由传统的人工焊接转变向机器人焊接。
国外厂商如FANUC、OTC、ABB和KUKA等对焊接机器人的研究较早,已经形成了系列化产品并投放占领大部分的国内外市场份额。
国内在近几年才开始进行机器人技术的研究,起步较晚,机器人的性能和技术都和国外厂商有一定的差距。
因此,国内市场也需要在借鉴国外同类型焊接机器人优点的基础上,立足于现有的加工制造业水平,从解决实际问题的角度出发,研究开发出满足中小企业实际需要的经济型可靠型焊接机器人。
SOLIDWORKS2014是由美国SOLIDWORKS公司研究开发的基于造型的三维机械设计软件,其特点是易学易用,在企业内部推广成本低,SOLIDWORKS Motion是嵌在SOLIDWORKS中的运动仿真模块,依托其强大的运动分析功能,能比较精确地对焊接机器人进行工件运动位置及运动参数的计算,并以动画的形式计算出虚拟现实的动画演示,能很直观地解决六自由度焊接机器人的运动规律问题。
通过建立虚拟仿真环境进行机器人的仿真实验研究,可以大幅度降低实验成本,提高实验效率,在运动状态下进行运动仿真,能有效地检查机器人本体结构设计的合理性等,对实际样机的设计具有重要的参考和指导价值。
一、机器人本体结构设计1.机器人设计参数根据各种工况,焊接机器人可设定不同的运行程序,在工作状态中兼备高速动态响应和良好的低速稳定性的优点,在控制性能方面可以实现连续轨迹控制和点位控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
辽宁石油化工大学毕业设计(论文)Graduation Project(Thesis)for Undergraduate of LSHU题目基于SolidWorks工业机器人设计TITLE Base SolidWorks Industrial Equipment Human Design学院矿业工程学院School Schoolof Mining Engineering 专业班级机制1341Major&ClassMechanism1341姓名宋记峰NameSongJifeng指导教师浦艳敏Supervisor PuYanmin2017年06月20日论文独创性声明本人所呈交的论文,是在指导教师指导下,独立进行研究和开发工作所取得的成果。
除文中已特别加以注明引用的内容外,论文中不包含任何其他个人或集体已经发表或撰写过的研究成果。
对本文的工作做出重要贡献的个人和集体,均已在文中以明确方式标明并致谢。
本声明的法律结果由本人承担。
特此声明。
论文作者(签名):2017年6月20日摘要在当代所有全自动高智能的制造区域,工业用的机械人本领是在这几十年里发展而来的。
工业机器手是工业机器人的一类,它们是通过自己的手臂和机械结构性能的双方的结合来完成任务的,各种动作是通过编程来实现的特征,尤其是机器人的智力和接受性[1]。
在保证精度情况下,能在多样环境下完成操纵能力,多功能自动定位控制和变化性的控制,能适应多个自由度,不同环境的作业有不同的机器人工作。
本文作为设计对象选择汽车生产线轴锻造搬运的机械手设计,设计了手和身体的各部分设计,机械手采用液压气缸臂驱动,使用SolidWorks软件进行了组装图和零件图的设计,对机械手进行简单的3D造型、爆炸图、动漫。
关键词:SolidWorks;机械手;液压AbstractInthefield of automatic manufacturing, industrial robot technology ha sbeen developedhere for decades. Industrial robothandis a kindof in dustrial robot, whichis the completion of their ownhumanand mechanicalstructure and performance of bothsidesofthe task, for a variety ofprogrammingfeatures, especially human intelligence andadaptability. Inthe caseofguaranteed accuracy, the ability toperform manipulation,automation, positioning, control, andchange ina variety of environments, the taskof deliveringjobsin a wide varietyof environments with varyingdegreesof freedom, is something.The manipulator design ofautomobile productionspoolhandling thi sdraft forging asthe design object, thedesignof eachpart of the design of handand body, the mechanical hand adopts hydraulic cylinder arm drive, SolidWorks isused todesigntheassembly drawingand parts drawing, simple 3Dmodeling,animation of themanipulator, explosion diagr am.Keywords :SolidWorks; Manipulator; Hydraulic pressure目录引言...................................................................................................11总体方案设计 (4)1.1汽车半轴模锻生产线的总体方案 (4)1.2机器人总体方案 (6)2手臂的设计计算 (8)2.1 手臂直线运动的驱动力计算 (8)2.1.1手臂水平回转运动驱动力计算 (8)2.1.2手臂竖直升降运动驱动力计算 (11)2.2 手臂上下驱动的力矩计算 (12)2.3液压缸的选择 (13)2.3.1伸缩缸的选择 (13)2.3.2 摆动缸的选择 (15)2.4 手臂的结构及装配……………………………………………………………172.4.1连接摆动缸 (18)2.4.2安装伸缩缸………………………………………………………………192.4.3手臂连接 (20)3机身设计………………………………………………………………………223.1 机身材料选用 (22)3.2 机身结构设计…………………………………………………………………223.3 机械定位挡块设计 (24)3.3.1 竖直定位挡块……………………………………………………………243.3.2 水平定位挡块……………………………………………………………253.4机器人装配……………………………………………………………………254机器人So l idW o rks建模仿真 (27)4.1SolidWorks软件介绍…………………………………………………………274.2机器人SolidWorks三维建模及装配 (27)4.2.1 零件的建模………………………………………………………………27 4.2.2 机器人装配………………………………………………………………304.3机器人SolidWorks运动仿真.........................................................31结论 (34)参考文献 (35)致谢...................................................................................................36附录 (37)引言目前在我国民营企业中的汽车行业名列前茅,近些年每个家庭都会拥有汽车导致汽车发展迅速。
跟着社会的不断发展再加上各行业的竞争导致汽车行业不断地生产新型汽车,以先进的系统漂亮的外形经济实惠的车去拓展市场。
汽车的零部件半轴是汽车重要的传力零件之一,它的零件工艺质量水准会导致车的产品发生问题。
那么问题来了,怎样提高半轴的质量呢?这是个值得研究重要的课题。
调查得知半轴模锻生产线时遇到的问题:生产过程中劳动力大;工作环境中的安全隐患;产量问题得不到固定;要对半轴模锻生产线进行智能化设计及改善。
自动生产线上的应用近些年频繁用到工业机器人技术。
工业机器人现已是工业中的扛把子,现在频繁的能在车间里看到自动化的设备配合生产,工业机器人的出现解决了人的劳动力,起作用搬运、组装、喷漆的操作。
它通过编程可以做重复的作业、多个自由度的操作。
工业机器人的工作是模拟人的手臂来工作。
其构造及系统组成分别是由控制器及伺服驱动系统,当然还有检测传感装置这几个重要的核心件组装而成,它的行动像人的工作一样、自动控制、编程可循环、可以完成各操纵的三维机电一体化的高机械设备的自动生产[2]。
更加适合与多品种、高质量、大批量的成产,因为工业机器人的在工厂的出现不仅仅保证了数量问题,更重要的是质量得到了无法想象的提高,所以工人地劳动力自然也随之改善,在工业生产中起到了很重要的地位。
在20世纪50年代末的美国由约瑟夫·英格伯格他们的团队一起研发出世界上的第一台工业机器人。
自从有了它之后我们多半工厂里的搬运工作、喷漆工作、焊接工作等都有它来代替。
在过十年之后人们开始重点研究它的外部传感器还有控制方面的使用方法。
随着科学的不断进步和发展机器人得到了更广泛的应用,慢慢出现在各行各业的机器人给我们带来了更全面的服务即使用。
在当代工业中,自动化设备已成为加工中心的不可缺少的地位生。
每个行业的自动化水平都在不断提高,当代加工中心都会有工业机器人的出现,它出现的目的都是为了高效率的生产及代替工人做工作中会高难度的危险工作。
现实中的例子有:汽车都是由零件组成,它的零件在生产过程中需要搬运,这个时候我们的工业机器人就起到了关键的作用,它可代取工人来作业,它甚至能把加工完的工件自动取出、自动包装、自动堆放以及卸货等。
现在中国的汽车生产中的冲压生产线就采用搬运机器人,这就实现了自动化生产。
在1995年中国辽宁省沈阳自动化研究所开始对只能生产系统加以研究,便开始实现使用工作,就在1997年中国长春一汽大众汽车车间的冲压生产线已经投入了自动化设备。
焊接机器人的出现提高了生产效率,在汽车制造业起到了至关重要的地位,因为车门的各个焊点都需要高难度、高精度、高质量的焊接。
弧焊的时候机器人必须拥有多个自由度这样确保证它质量。
点焊的时候能仔复杂空间作业,在焊接的位置数量得到了准确性的保障,要是工人难免会有漏洞的时候。
在英国的MOTOMAN公司研究了两台高性能焊接机器人的设备。
它的出现为了生产新型Jaguar Saloon汽车制造过程中的需要,第1台有六个自由度以及一个手动地旋转工作台。
而第2台在它的基础上拥有标准的外形,自带报警器及电力线地载源,它的自由度也达到了六轴的机器人水平还有2个自动地工作台。
自从这两台设备的生产投入后,汽车的成产超出了预计。
生产零件后的组装是个复杂的工作,通常在装配的时候会遇到工件的误差,导致装配出现问题,自从工业机器人的出现解决了这难题还保证了自动组装的产量还提高了质量。
在1959年美国弄出世界第一台Unimate工业机器人之后,它在发达的工业国家中得到极其广泛的应用。
有个非常典型的例子,在目前的日本可以算是工业机器人应用较为多的国家,而且所占有的数量达到了全地球的50%左右。
没想到美国还没日本的数量多,但其技术水平还是非常高的。
我国的研发工业机器人工作在70年代开始的,当时处于经济科学落后的状态,研究的结果较为迟钝,后来通过了20多年得变化世界工业变化,得到了国家的重视,开展全方面的迅速对它实行钻研。
在“七五”时期的时候国家在工业机器人方向做了两件特大的工程项目,投资在辽宁沈阳成立了“机器人国家研究中心”“智能机器人中心”,正是有关高校,机械工业和科学院参加了工业机器人的科技研究,取得了的进步。