工业机械臂 ppt课件
合集下载
第七讲机器人的机械臂结构PPT课件

2021
38
1机械臂结构机械臂结构一臂部设计的基本要求一臂部设计的基本要求1承载能力足承载能力足n手臂是支承手腕的部件设计时不仅要虑抓取物体的重量或携带工具的重量还要考虑运动时的动载荷及转动惯性
机械臂结构
2021
1
一、臂部设计的基本要求
2021
2
1.承载能力足
手臂是支承手腕的部件,设计时不仅 要考虑抓取物体的重量或携带工具的 重量,还要考虑运动时的动载荷及转 动惯性。
2—连杆 3—手臂 4—支承架
活塞的行程就控制
了手臂摆角的大小。
2021
23
齿轮驱动回转机构图例:
2021
24
3.关节型机械臂的结构(1)
存在的运动型式:
机身的旋转运动; 肩关节和肘关节的摆动; 腕关节的俯仰和旋转运动;
各运动的协调: 称为5轴关节型机器人。
2021
25
五轴关节型机器人手臂运动图例(1):
3、工字钢的长度按长度系 列购买。如:5~19m。
2021
5
槽钢(GB707-88)
1、槽钢的型号与高度尺寸 h有关,如:10号槽钢即指 其高度尺为100mm。
2、其它参数如截面积、单 位长度的理论质量、截面 静力矩等可查相应的设计 手册。
3、《钢结构》
2021
6
3、导向性能好,定位精度高
为防止手臂在直线运动中,沿运动轴 线发生相对转动,应设置导向装置。 同时要采用一定形式的缓冲措施。
2021
12
3.关节型
由动力型旋转关节 和前、下两臂组成。 关节型机器人以臂 部各相邻部件的相 对角位移为运动坐 标。动作灵活,所 占空间小,工作范 围大,能在狭窄空 间内饶过各种障碍 物。
机器人的机械臂结构课件

三、典型机械臂结构
1.手臂直线运动机构
常见方式:
行程小时:采用油缸或气缸直接驱动;
当行程较大时:可采用油缸或气缸驱动
齿条传动的倍增机构或采用步进电机或 伺服电机驱动,并通过丝杆螺母来转换 为直线运动。
典型结构:
油缸驱动的手臂伸缩运动结构 电机驱动的丝杆螺母直线运动结构
油缸—齿条机构图例:
2.手臂的回转运动机构
常见方式:
常见的有齿轮传动机构,链轮传动机构,活塞及连 杆传动机构等。
曲柄滑块机构:
假设滑块是主动件,当滑块沿一定的导轨移动时, 可以推动曲柄做摆动或圆周运动。
典型机构:
液压缸—连杆回转机构: 齿轮驱动回转机构:
平面四杆构图例:
双曲柄机构
平面四杆机构
双摇杆机构
二、机械臂的运动形式
1.直角坐标型
臂部由三个相互 正交的移动副组 成。带动腕部分 别 沿 X、Y、Z 三 个坐标轴的方向 作直线移动。结 构简单,运动位 置精度高。但所 占空间较大,工 作范围相对较小。
2.圆柱坐标型
臂部由一个转 动副和两个移 动副组成。相 对来说,所占 空间较小,工 作范围较大, 应用较广泛。
3.关节型机械臂的结构(1)
存在的运动型式:
机身的旋转运动; 肩关节和肘关节的摆动; 腕关节的俯仰和旋转运动;
各运动的协调: 称为5轴关节型机器人。
五轴关节型机器人手臂运动图例(1):
偏转 肘转
俯仰
肩转
腰转
腰转姿态
五轴关节型机器人手臂运动图例(2):
肩关节、肘关节与手腕的协调
3.关节型机械臂的结构(2)
3、《钢结构》
3、导向性能好,定位精度高
为防止手臂在直线运动中,沿运动轴 线发生相对转动,应设置导向装置。 同时要采用一定形式的缓冲措施。
第七讲机器人的机械臂结构PPT课件
2021
20
平面四杆机构图例:
双曲柄机构
平面四杆机构
2021
双摇杆机构
21
平面四杆机构演变图例:
曲柄滑块机构
平面四杆机构的的演变不仅要满足运动方面的要求,而且要满足受力
和结构上的要求。
2021
22
双臂机器人手臂结构图例:
运动特点:
1—铰接活塞缸
手臂关节的回转运 动是通过液压缸-连 杆机构实现。控制
油缸驱动的手臂伸缩运动伸缩运动结构电机驱动的丝杆螺母直线运动直线运动结构同样大小的气缸容积可以发出更大的指示功气缸工作容积的利用程度越佳
机械臂结构
2021
1
一、臂部设计的基本要求
2021
2
1.承载能力足
手臂是支承手腕的部件,设计时不仅 要考虑抓取物体的重量或携带工具的 重量,还要考虑运动时的动载荷及转 动惯性。
2—连杆 3—手臂 4—支承架
活塞的行程就控制
了手臂摆角的大小。
2021
23
齿轮驱动回转机构图例:
2021
24
3.关节型机械臂的结构(1)
存在的运动型式:
机身的旋转运动; 肩关节和肘关节的摆动; 腕关节的俯仰和旋转运动;
各运动的协调: 称为5轴关节型机器人。
2021
25
五轴关节型机器人手臂运动图例(1):
肘关节摆动:
电机M3→两级同步带传动B3、B3′→减速器R3→肘关节摆动 n3
肩关节的摆动:
电机M2→同步带传动B2→减速器R2→肩关节摆动n2
2021
28
关节型机器人传动 系统图:
关节型机器人腕部旋转 局部图:
电机M5→减速器R5→链轮 副 C5→锥齿轮副G5→旋转运动n5
机械手臂教材ppt课件

三、机器手臂的组成
手臂由以下几部分组成: (1)运动元件。如油缸、气缸、齿条、凸轮等是驱
动手臂运动的部件。 (2)导向装置。是保证手臂的正确方面及承受由于
工件的重量所产生的弯曲和扭转的力矩。 (3)手臂。起着连接和承受外力的作用。手臂上的
零部件,如油缸、导向杆、控制件等都安装在手臂上。 此外,根据机械来自运动和工作的要求,如管路、冷却
多轴机械手臂研发方面,多轴式机械手臂广泛应用于汽车製造 商、汽车零组件与电子相关产业。机械手臂可以提昇产品技术 与品质,而这些初期工作大多可以藉由机械手臂来完成。
近年来,各先进国家为了提昇台机器人的技术水准,都会推广 机器人产业与创立相关联盟,并且特别针对工业以外的领域进 行推广,例如:医疗、服务、生活方面…等。
机械手臂教材
目录
一、演进与发展 二、种类与原理
三、组成 四、应用于发展
一.演进与发展
1921年捷克科幻作家卡雷尔·恰佩克的《罗素姆的万 能机器人》最早出现机器人。 1956年第一台专门应用于产业生产使用的机械手臂 则是由具有「机械手臂之父」之称的约瑟夫·恩格伯 格(Joseph F. Engelberger)所发明的。利用乔治·迪 沃尔(George Devol)所授权的专利技术,研发出第 一台工业用机械手臂,名为「Unimate」。
装置、行程定位装置和自动检测装置等,一般也都装 在手臂上。所以手臂的结构、工作范围、承载能力和 动作精度都直接影响机械手的工作性能。
四、应用与发展
机械手臂在产业自动化的应用已经相当广泛,主要是使用于人 工无法进行或者会耗费较多时间来做的工作,机械手臂在精度 与耐用性上可以减少许人为的不可预知问题。
乔治·迪沃尔
1963年日本不二輸送机工业株式会社制造出专门 使用在栈板装载(Palletizing)的机械手臂,研发出 针对栈板专用的搬运工具。 1973年德国库卡机器人集团(KUKA Robot Group) 就研发出第一台采用机电驱动的6轴机械手臂。
工业机械臂PPT幻灯片共24页文档

6、最大的骄傲于最大的自卑都表示心灵的最软弱无力。——斯宾诺莎 7、自知之明是最难得的知识。——西班牙 8、勇气通往天堂,怯懦通往地狱。——塞内加 9、有时候读书是一种巧妙地避开思考的方法。——赫尔普斯 10、阅读一切好书如同和过去最杰出的人谈话。——笛卡儿
Thank you
1、不要轻言放弃,否则对不起自己。
2、要冒一次险!整个生命就是一场冒险。走得最远的人,常是愿意 去做,并愿意去冒险的人。“稳妥”之船,从未能从岸边走远。-戴尔.卡耐基。
梦喝起来是苦涩的,回味起来却有 久久不会退去的余香。
工业机械臂PPT幻灯片 4、守业的最好办法就是不断的发展。 5、当爱不能完美,我宁愿选择无悔,不管来生多么美丽,我不愿失 去今生对你的记忆,我不求天长地久的美景,我只要生生世世的轮 回里有你。
机械臂结构设计原理ppt (1)

2.手臂的回转运动机构
常见方式:
常见的有齿轮传动机构,链轮传动机构,活塞及连 杆传动机构等。
曲柄滑块机构:
假设滑块是主动件,当滑块沿一定的导轨移动时, 可以推动曲柄做摆动或圆周运动。
典型机构:
液压缸—连杆回转机构: 齿轮驱动回转机构:
平面四杆机构图例:
双曲柄机构
平面四杆机构
双摇杆机构
齿条传动的倍增机构或采用步进电机或 伺服电机驱动,并通过丝杆螺母来转换 为直线运动。
典型结构:
油缸驱动的手臂伸缩运动结构 电机驱动的丝杆螺母直线运动结构
油缸—齿条机构图例:
油缸驱动的手臂伸缩运动结构图例:
特点: 工作行程长,抓重大, 适合于抓举工件形状不 规则、有偏转力矩的场 合。
电机驱动丝杆螺母直线运动结构图例:
电机M4→减速器R4→链轮副C4→俯仰运动n4
肘关节摆动:
电机M3→两级同步带传动B3、B3′→减速器R3→肘关节摆动 n3
肩关节的摆动:
电机M2→同步带传动B2→减速器R2→肩关节摆动n2
关节型机器人传动 系统图:
腕部旋转局部图例:
电机M5→减速器R5→链轮 副 C5→锥齿轮副G5→旋转运动n5
2.刚度高:
为了防止臂部在运动过程中产生过大 的变形,手臂的截面形状要合理选择。
工字型截面的弯曲刚度一般比圆截面
大,空心管的弯曲刚度和扭转刚度都 比实心轴大得多。
工字钢(GB706-88):
1、工字钢的型号与高度尺 寸h有关,如:10号工字钢 即指其高度尺寸为100mm。
2、其它参数如截面积、单 位长度的理论质量、截面静 力矩等可查相应的设计手册。
腕部俯仰局部图例:
电机M4→减速器R4→链轮副 C4→俯仰运动n4
机械臂结构设计原理ppt
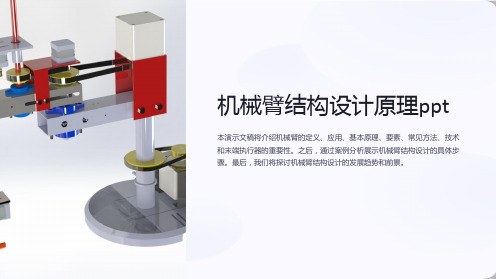
机械臂结构设计的基本原理
机械臂结构设计的基本原理包括运动学原理、力学原理和控制原理,通过优化设计来实现机械臂的高效运动。
机械臂结构设计的要素和考虑因素
载荷要素
根据应用需求确定机械臂的最大负载,确保结 构设计满足承载要求。
结构刚度
设计合适的结构来提高机械臂的刚度,提高运 动精度和控制性能。
工作空间
材料科学
采用新材料和工艺,提高机械 臂的轻量化和强度,改善整体 性能。
机械臂末端执行器设计和选择 的重要性
机械臂末端执行器是机械臂的关键组件,不同的执行器设计和选择会直接影 响机械臂的运动灵活性和工作效率。
机械臂结构设计的案例分析
工业自动化
通过合理的结构设计实现工业生 产线的自动化作业,提高生产效 率和品质。
考虑机械臂的活动范围和工作空间限制,确保 能够完成所需的各种任务。
安全因素
考虑机械臂运动过程中的安全性,确保不会对 人员和周围环境造成伤害。
机械臂结构设计的常见方法和技术
仿生设计
根据生物学原理,借鉴生物形 态和结构设计机械臂,提高机 械臂的柔顺性和适应性。
优化算法
使用优化算法来优化机械臂结 构设计,提高机械臂的性能和 效能。
医疗手术
精确的机械臂结构设计可用于辅 助医生进行精细的手术操作,提 高手术安全性和精准度。
物流业,自动完成物品的搬运和仓 储操作,提高效率和减少人力成 本。
机械臂结构设计的发展趋势和 前景
未来的机械臂结构设计将不断优化,包括更高的精度、更灵活的结构、更高 的负载能力和更智能的控制系统,为各行业带来更广泛的应用。
机械臂结构设计原理ppt
本演示文稿将介绍机械臂的定义、应用、基本原理、要素、常见方法、技术 和末端执行器的重要性。之后,通过案例分析展示机械臂结构设计的具体步 骤。最后,我们将探讨机械臂结构设计的发展趋势和前景。
《机器人手臂》PPT课件
h
34
五轴关节型机器人手臂运动图例(1):
偏转 肘转
俯仰
肩转
腰转
腰转姿态
h
35
五轴关节型机器人手臂运动图例(2):
肩关节、肘关节与手腕的协调
h
36
5.关节型机械臂的结构(2)
各运动的实现:
腕部的旋转:
电转机运M动5n→5 减速器R5→链轮副C5→锥齿轮副G5→旋 腕部俯仰:
电机M4→减速器R4→链轮副C4→俯仰运动n4 肘关节摆动:
h
5
工字钢(GB706-88):
1、工字钢的型号与高度尺 寸h有关,如:10号工字钢 即指其高度尺寸为100mm。
2、其它参数如截面积、单 位长度的理论质量、截面静 力矩等可查相应的设计手册。
3、工字钢的长度按长度系 列购买。如:5~19m。
h
6
工字钢
工字钢也称钢梁,是截面为工字形的长 条钢材。其规格以腰高( h)*腿宽(b)*腰 厚(d)的毫数表示,如“工160*88*6”, 即表示腰高为160毫米,腿宽为88毫米, 腰厚为6毫米的工字钢。工字钢的规格也 可用型号表示,型号表示腰高的厘米数, 如工16#。
h
25
丝杆螺母传动手臂升降机构
P47 图2.41
h
26
3.手臂俯仰运动机构
机器人手臂的俯仰运动一般采用活塞油 (气)缸与连杆机构联用来实现。手臂的 俯仰运动用的活塞缸位于手臂的下方, 其活塞杆和手臂用铰链连接, 缸体采用 尾部耳环或中部销轴等方式与立柱联接, 如图2.42、图2.43所示。此外,还有采用 无杆活塞缸驱动齿轮齿条或四连杆机构 实现手臂的俯仰运动。
电关节机摆M3动→n两3 级同步带传动B3、B3′→减速器R3→肘 肩关节的摆动:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ppt课“件桌面级”。
18
重复高精度机器人
ppt课件
19
新型多传感器机器人
摄像头识别和校正
ppt课件
碰撞检测:其精确的力反馈使机器人可以在 发生轻微碰撞的几毫秒内停下,保证安全
20
机械手可以减省工人、提高效率、降低成本、提高产品品质、 安全性好、提升工厂形象。
多关节机械手的优点是: 动作灵活、运动惯性小、通用性强、能抓取靠近机座的工件, 并能绕过机体和工作机械之间的障碍物进行工作。 随着生产的需要,对多关节手臂的灵活性,定位精度及作业空 间等提出越来越高的要求。多关节手臂也突破了传统的概念, 其关节数量可以从三个到十几个甚至更多,其外形也不局限于 像人的手臂,而根据不同的场合有所变化,多关节手臂的优良 性能是单关节机械手所不能比拟的。
ppt课件
21
ppt课件
谢谢!
Thanks for you listening .
22
ppt课件
7
十大工业机器人品牌
史陶比尔(Staubli)-瑞士 柯马(COMAU)-意大利
爱普生(DENSO EPSON) 机器人(机械手)-日本
安川(Yaskawa)-日本
新松(SIASUN)机器人-中国
ppt课件
8
工业机械手的组成:
机械手主要由执行机构、驱动系统、控制系统及位置检测装 置等组成,各部分之间的相互关系如下图示。
控制系统
驱动系统 位置检测
执行机构
工件
ppt课件
9
执行机构:包括手部、手腕、手臂和立柱等部件,有的还增设 行走机构。
手臂:支承手腕和手部
驱动系统
法兰盘:外接手 部的机械式接口
控制装置:控 制驱动系统
立ppt课柱件 :支承手臂
手腕:连接手部和手臂
10
驱动系统:驱动执行机构运动的动力装置,常用液
压、气动、电机三种形式。
5
工业机械臂是 拟人手臂及手功能
的机械电子装置。 它可把任一物件或 工具按空间位姿 (位置和姿态)的 时变要求进行移动, 从而完成某一工业 生产的作业要求。
ppt课件
6
十大工业机器人品牌
发那科(FANUC)-日本 库卡(KUKA)-德国 那智不二越(NACHI) -日本
川崎机器人-日本
ABB Robotics机器人-瑞典
控制系统:机械手动作的指挥系统,用来控制动
作的顺序、位置、时间、速度和加速度等。
ppt课件
11
典型电机机械臂的转动关节组成
t课件
12
ppt课件
13
协作型机器人 低成本机械臂 重复高精度机器人
新型多传感器机器人
ppt课件
14
协作型机器人(Co-Bot)是ABB以及众多机器人企业 瞄准的下一个热点
工业机械臂简介
16 吴
ppt课件
1
Fanuc的柔性制造单元主要 包括加工中心和工业机器人
美国M.E.Merchant提出计算机集成制造概念
ppt课件
2
ppt课件
3
ppt课件
4
在智慧工厂和智能生产的两大主题 下,生产设施也是重要的一环:
设施: 由整个 生产价 值链所 集成, 可实现 自组织
ppt课件
ppt课件
15
ppt课件
16
而视频中的打包礼物,则需要机器人同 时完成:
1. 与可变形(deformable环境交互) 2. 使用工具 3. 双臂协作 4. 保证人员安全
ppt课件
17
低成本机械臂
uArm 是一款桌面级四轴开源机迷你械臂,其灵感来自于 ABB 码垛机械
人 IRB460。团队将机械臂的价格做到了 “消费级”,尺寸都做到了