常用三维移动扫描车型号及参数(精)
常用三维移动扫描车型号及参数(精)

常用三维移动扫描车型号及参数三维移动扫描车型号1:拓普康IP-S2移动测量系统仪器介绍:拓普康IP-S2移动测量系统成功解决了多维空间信息采集的瓶颈,采用卫星定位、惯导测量等融合定位方式,利用集成的360°相机和多重激光扫描设备,可以快速地提供精确的多元数据流,并且可在线进行数据更新,节省了大量的人力物力。
目前,在全球已有近千套IP-S2移动测量系统成功服务于城市景观漫游(如三维数字街景数据采集)、道路及管线设施普查、公众安全等领域。
产品特点:● 精确记录具有空间参照信息和时标信息的RGB点云及视频影像● 高精度GPS+GLONASS信号跟踪● 惯性测量单元辅助导航定位● 获取道路及周边地物的3D特征● 获取道路沿线360°全景影像● 快速、简易的安装和拆卸特性说明:可同时获取具有空间和时标信息的RGB点云及360°影像双频GPS+GLONASS 定位IP-S2主控单元使用多传感器实时获取精确的车辆位置和姿态。
由于双频GNSS接收机能同时跟踪GPS和GLONASS信号,从而使IP-S2应用范围更广,尤其在有遮挡的城市区域。
内置IMU连续不间断的监控车辆的运动和姿态,即使行驶在有障碍物、隧道等没有GNSS信号的情况下,IP-S2系统也能跟踪定位车辆的位置。
车轮编码器车轮编码器提高了定位精度和可靠性。
安装在后轮的车轴上,编码器可以检测每个轮子的转动。
车辆姿态是通过比较两轮之间的转动速度而精确计算得到。
激光扫描仪(可选)三个2D激光扫描仪能够获取道路路面及两侧的高分辨率3D点云,并且不受光线条件的影响。
IP-S2系统利用高精度的点云数据和GPS时间能够定期进行道路形状、位置和属性等的检测。
360°全景相机(可选)360°全景相机连续捕获球面影像。
影像与点云的完美结合大大提高了三维分析功能。
高度集成的安装支架,易于快速安装和拆卸IP-S2的安装支架将所有的传感器集成到一块,易于快速、简易安装和拆卸。
常用三维移动扫描车型号及参数3(精)
常用三维移动扫描车型号及参数2
三维移动扫描车型号3:Landmark移动测绘系统---美国Trimble
Landmark系统介绍:
Landmark移动测绘系统是美国天宝(Trimble)公司研制的一套完全基于陆路交通工具(汽车/火车)进行移动测绘的系统,能为各个行业信息化过程中的基础数据建设提供快速的、准确的高精度数据采集和三维建模解决方案。
Applanix Landmarks 系统(LMS)可以为数据生产公司和最终用户提高生产效率,是业内第一款移动制图和三维建模解决方案。
Landmark系统特点和优势:
1、可以快速移动制图,并可以得到三维地形数据,可以克服GPS信号失锁。
2、相对于GPS和全站仪等测量方式,Landmark可以实现小范围内的三维地形数据快速生成,对于机场、石油管线、市政管理等测绘数据生产具有较大的意义,可以大大缩短项目数据采集时间、节省大量的人工费用,减少工程的复杂度。
3、相对于航空摄影测量方式,机动灵活,成本低,更新数据快,周期短。
4、系统平台可以搭载多种遥感数据获取系统。
5、获取数据快速精准,并且信息量非常大。
Landmark系统技术参数:
1. 定位定姿系统(POS LV)
2. 数码相机
3.激光扫描仪-SICK。
3D扫描仪参数

江苏农林职业技术学院
机电工程学院
三维扫描仪技术参数
一、拍照式三维扫描仪
型号(项目)VTOP200B
二、手持式激光三维扫描仪
型号(项目)VTOP600H 生产企业天津微深科技有限公司品牌VTOP
型号600H
重量小于1kg
尺寸315*165*105毫米
光源形式三束交叉激光线以及一束可以单独工作的激光线,共计
7束激光线,高速扫描
激光发射位置所有激光由同一位置发出,最大限度避免多位置多角度发射激光而产生遮挡和相互干扰
白光补偿启动照度阀值35LX
切换单束激光扫描深孔及
死角
支持
扫描速率265,000次测量/秒
激光类别Ⅱ级(人眼安全)
分辨率0.05毫米
精度最高0.03毫米
体积精度1
(单独使用扫描仪)
0.02毫米+0.08毫米/米
基准距300毫米
景深250毫米
输出格式. ply、.xyz、.dae、.fbx、.ma、.obj、.asc、.stl等,可定制工作温度5~40℃
接口方式采用千兆网线连接,能支持远距离正常工作价格22.8万元
三、桌面SLA打印机
四、双喷头FDM印机。
手持式3d扫描仪参数

三维扫描仪的种类和型号不计其数,不同的扫描仪特点有所差别,用于的领域也不同,目前在检测领域比较主流的有三坐标测量仪、拍照式三维扫描仪和手持式三维扫描仪等,并且型号和参数又是大家选购的时候比较关心的问题,下文将会针对国内外几款好用的三维扫描仪的型号和特点和参数给大家做一个简单的介绍。
一、适合工业用的高精度手持三维扫描仪(国外款)
二、适合工业用的高精度手持三维扫描仪(国内款)
近年来,在国家政策的扶持下,国内三维扫描行业的发展也非常迅猛,雨后春笋版出现了诸多的厂家。
经过了几年的发展和沉淀,一些对研发力量比较重视的企业就慢慢开始凸显起来了。
三、可以扫描彩色的手持三维扫描仪(国外款)
四、可以扫描彩色的手持三维扫描仪(国内款)
市面上的三维扫描仪型号参数不胜枚举,往往让刚接触到的人眼花缭乱。
但是按照功能来划分,其大类的划分还是很清晰的。
如此一来,在同类型产品中,选择一个稳定性更高、更符合自身需求的产品,选择起来就容易很多了。
上海沪敖信息科技有限公司是一家致力于三维数字化行业解决方案的技术型企业。
公司以行业应用为出发点,为客户提供三维数字化采集、三维数据处理等一系列服务。
沪敖拥有手持三维扫描仪、小空间三维扫描仪、地面三维激光扫描仪、无人机实景三维系统、3D 打印机等多种技术手段,是行业内知名设备的签约合作伙伴。
从几厘米到几十米的对象、或从几米到上千米的三维空间,沪敖均可提供涵盖软硬件产品和技术服务的完整解决方案。
3D打印室
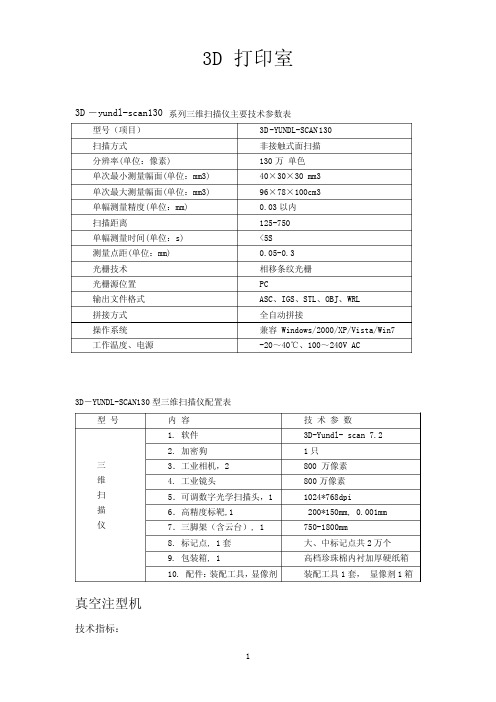
3D打印室3D-yundl-scan130系列三维扫描仪主要技术参数表型号(项目) 3D-YUNDL-SCAN130扫描方式 非接触式面扫描分辨率(单位:像素) 130万 单色单次最小测量幅面(单位:mm3) 40×30×30 mm3单次最大测量幅面(单位:mm3) 96×78×100cm3单幅测量精度(单位:mm) 0.03以内扫描距离 125-750单幅测量时间(单位:s) <5S测量点距(单位:mm) 0.05-0.3光栅技术 相移条纹光栅光栅源位置 PC输出文件格式 ASC、IGS、STL、OBJ、WRL拼接方式 全自动拼接操作系统 兼容 Windows/2000/XP/Vista/Win7 工作温度、电源 -20~40℃、100~240V AC3D-YUNDL-SCAN130型三维扫描仪配置表型 号 内 容 技 术 参 数三 维 扫 描 仪 1. 软件 3D-Yundl- scan 7.22. 加密狗 1只3.工业相机,2 800 万像素4. 工业镜头 800万像素5.可调数字光学扫描头,1 1024*768dpi6.高精度标靶,1 200*150mm, 0.001mm7.三脚架(含云台), 1 750-1800mm8. 标记点, 1套 大、中标记点共2万个9. 包装箱, 1 高档珍珠棉内衬加厚硬纸箱10. 配件:装配工具,显像剂 装配工具1套, 显像剂1箱真空注型机 技术指标:成型室成型室尺寸ZK550:550 mm×510 mm×1036 mmZK800: 800 mm×650 mm×1490mm 最大制件重量 2.5KG抽气时间 2~3分钟排气时间 25秒真空泵类型 X_63型单级旋片式真空泵 真空度 表压-0.092—0.095MPa设备外形尺寸ZK550:1300mm(L)×910mm(W)×1590mm(H)ZK800:1420mm(L)×1010mm(W)×1800mm(H) 电源 380VAC,50Hz,1.6KW,三相四线接地保护 设备重量 约800Kg激光快速成型机3D-YUNDL-SPS25技术参数:型号 3D-YUNDL-25最大激光扫描速度 6m/s焦平面光斑尺寸 ≤0.1mm成型空间 96×78×100cm打印层厚 ±0.008(L≤100mm)或±0.08%(L≥100mm)打印精度 0.2-0.3mm三色三维打印机多色打印3色打印头数3个成型尺寸96×78×150cm电源系统:220V、2.4A、标准接地面成型3D打印机主要技术参数:型号 3D-YUNDL成型空间 96×78×100cm加工精度 0.05mm分层厚度 0.25-0.05mm 可调打印速度 8~15mm/h外形尺寸技术 采用1920×1080分辨率面成型仪电力需求 12VDC/3A整机功率 450W3D 打印耗材:粉末材料;线性材料。
常用测量机器人型号及参数(精)
常用测量机器人型号及参数测量机器人型号1:SRX测量机器人仪器介绍:索佳超级测量机器人可实现对目标的快速判别、锁定、跟踪、自动照准和高精度测量,可以在大范围内实施高效的遥控测量。
使您在遥控测量操作中的那些烦恼成为历史。
该系统由索佳新一代全站仪SRX和索佳超级目标捕捉系统组成。
系统特点:索佳超级测量机器人可实现对目标的快速判别、锁定、跟踪、自动照准和高精度测量,可以在大范围内实施高效的遥控测量。
使您在遥控测量操作中的那些烦恼成为历史。
该系统由索佳新一代全站仪SRX和索佳超级目标捕捉系统组成。
超级目标捕捉系统由镜站端可发射扇形光束的RC遥控器和测站端SRX系列全站仪上的光束探测器组成;光束探测器能敏锐地感知RC遥控器所发出的瞬间光信号,并驱动全站仪快速地指向目标,对目标进行精确照准和测量。
系统内置智能方向传感器可以判别和锁定指定目标,实现对目标的智能跟踪。
超级目标捕捉系统驱动全站仪快速照准棱镜所在方位,并对目标实施高精度的自动照准和测量。
超级目标捕捉系统能够驱动全站仪自动照准和锁定目标棱镜,测量过程中移动棱镜时即使出现影响目标通视的障碍物(如建筑、树木、汽车等物体),仪器也能锁定目标棱镜,确保测量工作的正确进行。
在地形复杂的条件下作业时,测量人员只须注意脚下的路面,而不必太在意棱镜的姿态。
即使目标棱镜暂时失锁,只须在镜站方发出搜索指令,仪器便可快速地重新锁定目标。
即使镜站附近有其他反射棱镜也不会产生误测,超级目标捕捉系统会驱动全站仪锁定和照准正确的棱镜。
技术性能参数:测量机器人型号2:GPT-9000A彩屏 WinCE测量机器人仪器介绍:彩屏 WinCE测量机器人采用最安全的1级激光,无棱镜测距达2000m,再一次打破了无棱镜测距的极限。
系统特点:■ 采用最安全的1级激光,无棱镜测距达2000m,再一次打破了无棱镜测距的极限■ 配备自动追踪,自动照准功能和Windows CE操作系统;跟踪速度达15°/秒,可以用于几乎所有的测量领域■ 红色激光指向:装有红色、极小光点激光指示器,轻松可知被测点位置,方便用户定向或放样作业■ XTRAC 棱镜跟踪技术:●瞬间重捕跟踪锁定技术●拓普康第三代快速锁定技术●快速锁定技术和IR通讯技术的完美结合■ 高级系统设计:仪器端和反光镜端均为无线连接●Windows CE操作系统●彩色触摸屏幕●新型、超快速伺服马达驱动■ 内置无线电通讯系统:●内置2.4GHz SpSp无线电通讯系统●集成在仪器的侧面板中●可选配用于FC-200 的RS-1电台模块■ 新型的FC-200野外控制器:●内置蓝牙无线通讯模块●Inetl XScale520MHz CPU ●Windows CE操作系统●彩色触摸屏幕●可选配RS-1电台模块■ 真正无线连接的系统:●GPT-9000A测量机器人●FC-200野外控制器●RS -1电台模块●轻便的360°棱镜●功能强大的TopSURV 软件技术性能参数:测量机器人型号3:GTS-900A测量机器人产品特点:彩屏 WinCE测量机器人您工作中最佳助手,配备自动追踪,自动照准功能和Windows CE操作系统,跟踪速度达15°/秒;可以用于几乎所有的测量领域。
三维激光扫描系统技术参数

三维激光扫描系统技术参数一.仪器精度:(1)点位精度:3 mm @ 50 m; 6 mm @ 100 m(2)距离精度:1.2 mm + 10 ppm(3)角度精度:8" / 8"(垂直/水平)(4)标靶获取精度:2 mm @ 50 m(5)双轴补偿器:实时机载液态传感器形式的双轴补偿,可选开/关,分辨率1’,补偿范围+/- 5’,补偿精度1.5"二.激光扫描:(6)激光类型:脉冲式,超高速WFD(波形数字化)增强技术,颜色及波长:1550 nm (不可见的) /658 nm (可见的),激光等级1级(符合IEC60825:2014标准)(7)扫描距离,范围:最小距离0.4 m最大范围270 m(34 %反射率),范围噪音*0.4 mm rms @ 10 m,0.5 mm rms @ 50 m(8)扫描速率:1000000点/秒(9)激光光斑大小:前窗激光光斑直径≤3.5mm(10)数据储存容量:256 GB内置固态硬盘(SSD)或外接USB设备(11)数据传输:千兆以太网,集成WLAN USB 2.0设备(12)机载界面显示:触摸屏(触笔)控制,真彩色VGA图形显示(640 x 480像素)(13)激光对中器:激光安全等级:1级(IEC 60825:2014)对中精度:1.5 mm @ 1.5 m 激光光斑直径:2.5 mm @ 1.5 m可打开/关闭(14)激光发散角:<0.23mrad(15)视场角:水平:360°(max)垂直:270°(max)照准:无视差,可变焦(16)仪器可同时使用两块内置锂电池和一块外挂锂电池,支持热交换2块内电池内置电池> 5.5小时(2块电池)外挂电池> 7.5小时(常温下)以便适应长时间野外作业;外接电源:24 V直流电或100 - 240 V交流电,典型40w功耗;。
ESCAN-3三维扫描仪技术方案
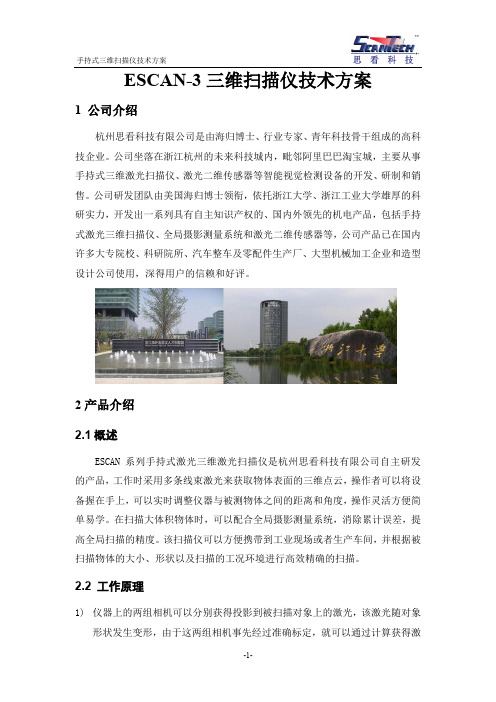
ESCAN-3三维扫描仪技术方案1 公司介绍杭州思看科技有限公司是由海归博士、行业专家、青年科技骨干组成的高科技企业。
公司坐落在浙江杭州的未来科技城内,毗邻阿里巴巴淘宝城,主要从事手持式三维激光扫描仪、激光二维传感器等智能视觉检测设备的开发、研制和销售。
公司研发团队由美国海归博士领衔,依托浙江大学、浙江工业大学雄厚的科研实力,开发出一系列具有自主知识产权的、国内外领先的机电产品,包括手持式激光三维扫描仪、全局摄影测量系统和激光二维传感器等,公司产品已在国内许多大专院校、科研院所、汽车整车及零配件生产厂、大型机械加工企业和造型设计公司使用,深得用户的信赖和好评。
2产品介绍2.1概述ESCAN系列手持式激光三维激光扫描仪是杭州思看科技有限公司自主研发的产品,工作时采用多条线束激光来获取物体表面的三维点云,操作者可以将设备握在手上,可以实时调整仪器与被测物体之间的距离和角度,操作灵活方便简单易学。
在扫描大体积物体时,可以配合全局摄影测量系统,消除累计误差,提高全局扫描的精度。
该扫描仪可以方便携带到工业现场或者生产车间,并根据被扫描物体的大小、形状以及扫描的工况环境进行高效精确的扫描。
2.2 工作原理1)仪器上的两组相机可以分别获得投影到被扫描对象上的激光,该激光随对象形状发生变形,由于这两组相机事先经过准确标定,就可以通过计算获得激光线所投影的线状三维信息;2)仪器根据固定在被检测物体表面的视觉标记点来确定扫描仪在扫描过程中的空间位置,这些空间位置被用于空间位置转换;3)利用第1步获得的线状三维信息和第2步的扫描仪空间相对位置,当扫描仪移动时,不断获取激光所经过位置的三维信息,从而形成连续的三维数据。
2.3产品特点三束平行线激光扫描,扫描速度快;超高性价比,定价远低于市场上同类型手持式激光扫描仪,性能与高端扫描仪类似;被扫描物体可以移动,无需固定;目标点自动定位,不需要额外机械臂或其他跟踪设备;采用千兆网线连接,能支持远距离正常工作;两个高分辨率的图像采集单元及一套激光发射器,扫描更清晰精确;点云无分层,自动生成三维实体图形(三角网格面);手持任意扫描,随身携带,重量小于一公斤;可内、外扫描,也可在狭窄的空间扫描,如飞机驾驶舱,汽车内部仪表板等无局限。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
常用三维移动扫描车型号及参数
三维移动扫描车型号1:拓普康IP-S2移动测量系统
仪器介绍:
拓普康IP-S2移动测量系统成功解决了多维空间信息采集的瓶颈,采用卫星定位、惯导测量等融合定位方式,利用集成的360°相机和多重激光扫描设备,可以快速地提供精确的多元数据流,并且可在线进行数据更新,节省了大量的人力物力。
目前,在全球已有近千套IP-S2移动测量系统成功服务于城市景观漫游(如三维数字街景数据采集)、道路及管线设施普查、公众安全等领域。
产品特点:
● 精确记录具有空间参照信息和时标信息的RGB点云及视频影像
● 高精度GPS+GLONASS信号跟踪
● 惯性测量单元辅助导航定位
● 获取道路及周边地物的3D特征
● 获取道路沿线360°全景影像
● 快速、简易的安装和拆卸
特性说明:
可同时获取具有空间和时标信息的RGB点云及360°影像双频GPS+GLONASS 定位IP-S2主控单元使用多传感器实时获取精确的车辆位置和姿态。
由于双频GNSS接收机能同时跟踪GPS和GLONASS信号,从而使IP-S2应用范围更广,尤其在有遮挡的城市区域。
内置IMU连续不间断的监控车辆的运动和姿态,即使行驶在有障碍物、隧道等没有GNSS信号的情况下,IP-S2系统也能跟踪定位车辆的位置。
车轮编码器
车轮编码器提高了定位精度和可靠性。
安装在后轮的车轴上,编码器可以检测每个轮子的转动。
车辆姿态是通过比较两轮之间的转动速度而精确计算得到。
激光扫描仪(可选)
三个2D激光扫描仪能够获取道路路面及两侧的高分辨率3D点云,并且不受光线条件的影响。
IP-S2系统利用高精度的点云数据和GPS时间能够定期进行道路形状、位置和属性等的检测。
360°全景相机(可选)
360°全景相机连续捕获球面影像。
影像与点云的完美结合大大提高了三维分析功能。
高度集成的安装支架,易于快速安装和拆卸IP-S2的安装支架将所有的传感器集成到一块,易于快速、简易安装和拆卸。
运输箱能够装入整个安装支架,为IP-S2系统提供了保护和安全运输。
一台笔记本即可完成任意工作,高集成度系统的配置仅需要车里放置一台笔记本。
从数据采集到处理再到分析都可以使用同一台笔记本完成。
技术指标:
配套软件:
IP-S2 Dashboard——数据采集软件
IP-S2 Dashboard是通过PC端的FireFox Web浏览器来操作的,具备友好的操作界面。
此软件通过网络使用户控制IP-S2主机和配置连接多种传感器。
它也能控制数据采集、存储和显示。
坐标系统转换
专业的坐标系统转换软件能够将WGS84坐标的点云数据转换成本地坐标系统,这将更适用于GIS或CAD平台的应用。
三维移动扫描车型号2:移动道路测量系统(MMS)---武汉立得
仪器介绍:
MMS代表着当今世界最尖端的测绘科技,它是在机动车上装配GPS、CCD、INS/DR等先进的传感器和设备,在车辆高速行进之中,快速采集道路及两旁地物的空间位置数据和属性数据,并同步存储在车载计算机中,经专门软件编辑处理,形成各种有用的专题数据成果,能满足市政城管、交通、公安/应急、铁路、公众位置服务等多领域用户对于实景三维地理信息快速采集与更新的需求。
系统在定姿定位子系统的辅助下,快速采集地貌、地物的点云与影像数据,实时计算出被测物的精确地理坐标,生成空间点云数据信息库,在点云数据库的支持下,与高分辨率实景影像数据进行精确匹配,生成精细、精准的三维地理空间模型,可输出成果:激光点云、高清街景、三维模型、矢量图。
技术指标:
系统指标
定位精度后处理:水平:0.01m 垂直:0.015mRMS
RTK水平:0.02m 垂直:0.05m RMS
GPS数据更新率5Hz
三维移动扫描车型号3:Landmark移动测绘系统---美国Trimble
Landmark系统介绍:
Landmark移动测绘系统是美国天宝(Trimble)公司研制的一套完全基于陆路交通工具(汽车/火车)进行移动测绘的系统,能为各个行业信息化过程中的基础数据建设提供快速的、准确的高精度数据采集和三维建模解决方案。
Applanix Landmarks 系统(LMS)可以为数据生产公司和最终用户提高生产效率,是业内第一款移动制图和三维建模解决方案。
Landmark系统特点和优势:
1、可以快速移动制图,并可以得到三维地形数据,可以克服GPS信号失锁。
2、相对于GPS和全站仪等测量方式,Landmark可以实现小范围内的三维地形数据快速生成,对于机场、石油管线、市政管理等测绘数据生产具有较大的意义,可以大大缩短项目数据采集时间、节省大量的人工费用,减少工程的复杂度。
3、相对于航空摄影测量方式,机动灵活,成本低,更新数据快,周期短。
4、系统平台可以搭载多种遥感数据获取系统。
5、获取数据快速精准,并且信息量非常大。
Landmark系统技术参数:
1. 定位定姿系统(POS LV)
2. 数码相机
3.激光扫描仪-SICK
对肉眼无害对肉眼无害功率30 W;140 W (加热状态下)20 W (最大)工作电压24V直流电24V直流电尺寸248 mmx 351 mm x 265 mm 155mmx 210mm x 156mm
重量9 kg 4.5 kg
三维移动扫描车型号4:iMMS移动实景测图系统
IMMS系统介绍:
iMMS移动实景测图系统核心技术:
CV(Camera Vector,相机矢量技术),类人眼的视觉识别、定姿定位技术;
脱颖而出的定位定姿技术,基于相机在移动过程中采集的特征点完成定位定姿,不依赖GPS/IMU/陀螺等定位定姿传感器;
自动解算相机的6个外方位元素,即三维位置坐标(X, Y, Z) 和三维姿态角(θX,θY,θZ=Y,P,R);
高精度的三维定位和识别技术,采集得到360度球幕影像视频,影像视频帧与帧之间间距小于1m;
持续自动跟踪不低于500个特征点,自动计算相机的位置和姿态,排除相机震动噪声干扰,根据GPS/IMU校准相机绝对位置(可选)根据地面控制点/地图校准相机绝对位置 (无GPS情况下)
iMMS移动测图系统主要优势:
硬件配置简便:主要为1个或2个全景相机,并辅以倾斜传感器或加速度计IMS2---相机系统、IMS3---双相机系统
平台灵活:可以是车辆、摩托、电瓶车、船、飞机、人背式…
安装校正十分简单:不同于基于POS、车轮传感器、激光扫描、相机的繁杂系统。
准自动三维建模,可视化量测与识别(一切工作在实景正射影像上展开)可引入计算机图形(便于现况模拟和规划)可引入各种控制点来进行比例尺调整和坐标转换(不仅仅是GPS)
二、三维GIS交互(可提供SDK)视觉定位(因为基于特征点)
应用广泛(GIS数据库更新、资产管理、模拟与规划、虚拟旅游、道路养护、三维导航…)GIS数据库创建/更新
资产管理、仿真演练、测量分析、虚拟旅游、旅游景区/场馆演示、实景导航、道路表面及附属设施盘查和养护、城市规划中的情景模拟、准自动化城市三维建模
iMMS移动测图系统应用领域:
行进速度:
城市、道路: 40 – 50 km / h
小巷、隧道:30 km / h
数据采集更新率:16 FPS / s
数据大小: 3-5 GB / Km
数据时间同步:1 PPS
车辆之间保持:距离5- 10 meter
数据精度:
10m处:绝对精度15 cm RMS,相对精度1-5 cm RMS 50m处:绝对精度20 cm RMS,相对精度15 cm RMS iMMS移动测图系统数据采集参数城市(每km) IMS3 –(3000 – 4000 帧)– 2 小时max
后处理生成CV影像
影像效果优化+去除死角
郊区(每km)
IMS3 – ( <3000帧) – 1小时max
后处理生成CV影像(45分钟)
影像效果优化+去除死角
iMMS移动测图系统数据后处理速度。