单片机机械手设计
单片机机械手设计PPT课件

第9页/共15页
系统控制电路图
第10页/共15页
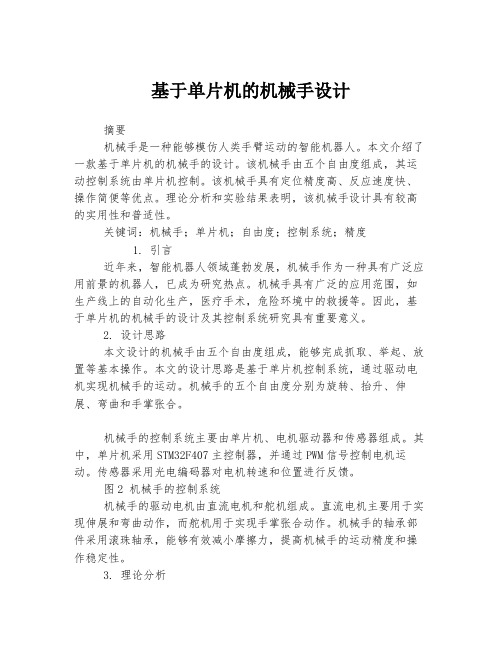
程序流程图
开始
系统 初始 化 检测有无 工件
检测工 件 是否红 色 电机M1 正传
电磁铁 通电
电机M1 反转
电机M2,M3 正传
位 置 检 测 电机M1 正传
电磁铁 断电
第11页/共15页
电机M1 反转
电机M2,M3 反传
位置 检测
循 环
控 制 结束
毕业设计任务与要求:
• 毕业设计主要内容:
生产线上有红黑两种直径为2cm厚1cm 的圆铁片,设计一种机械手,该手能自动筛选出 红色铁片,并把红色铁片放到指定位置。由伺服 电机控制,控制电路和电机电路实现光电隔离, 并要求机械手有判别铁片颜色的功能,且能准确 把握铁片位置因素。该手运行路径合理,接近指 定位置时能够减速运行。整个过程无人工操作, 系统通过传感装置检测机械手位置,工作结束能 自动停止。 • 完成该系统的硬件,软件设计; • 编写适当的语言程序;
传感器选择
颜色值或颜色 模拟量输出0-10V 最大颜色选择度 导向光束(红色) 响应时间,典型值:100µs 自 检功能 独立放大器,1种颜色自学功能 物体尺寸> 5 mm 信号强度0-10V 距离:5-200mm 白色光源 达到32色自学功能的FSK存储卡 任选附件 防护等级IP 65 光源,自适应颜色传感器和放大
第14页/共15页
感谢您的观看!
第15页/共15页
H
H
LT1、流出OUT2
L
X
L 流出OU1T、流出OUT2
H
H
H 流出OUT1、流出OUT2
H
L
H 流入OUT1、流入OUT2
基于单片机的机械手运动控制系统设计说明

毕业论文(设计)材料
题目:基于单片机的机械手运动控制系统
设计
学生:韬
学生学号: 0808020119 系别:电气信息工程系
专业:自动化
届别: 2012届
指导教师:苗磊
填写说明
1、本材料包括师学院本科毕业论文(设计)任务书、开题报告以及毕业论文(设计)评审表三部分容。
2、本材料填写顺序依次为:
(1)指导教师下达毕业论文(设计)任务书;
(2)学生根据毕业论文(设计)任务书的要求,在文献查阅的基础上撰写开题报告,送交指导教师审阅并签字认可;
(3)毕业论文(设计)工作后期,学生填写毕业论文(设计)主要容,连同毕业论文(设计)全文一并送交指导教师审阅,指导教师根据学生实际完成的论文(设计)质量进行评价;
(4)指导教师将此表连同学生毕业论文(设计)全文一并送交评阅教师评阅。
3、指导教师、评阅教师对学生毕业论文(设计)的成绩评定均采用百分制。
4、毕业论文(设计)答辩记录不包括在此表中。
一、毕业论文(设计)任务书
二、毕业论文(设计)开题报告
三、毕业论文(设计)评审表。
基于单片机控制的工业机械手控制系统课程设计
基于单片机控制的工业机械手控制系统课程设计(摘要与目录在最后)第一章绪论1.1机械手的概述1.1.1机械手的简介机械手是模仿着人手的部分动作,按照给定程序、轨迹和要求能实现自动抓取、搬运的自动机械装置。
在工业生产中应用的机械手叫做“工业机械手”。
在实际生产中,应用机械手可以提高生产的自动化水平和劳动生产率,可以减轻劳动强度、保证产品质量、实现安全生产。
尤其在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境下,它代替人进行正常的工作,意义更为重大。
随着生产的发展,功能和性能的不断改善和提高,在机械加工、冲压、锻、铸、焊接、热处理、电镀、喷漆、装配以及轻工业、交通运输业等领域得到了越来越广泛的应用。
国内外对机器人及机械手所作的定义不尽相同。
国际标准化组织对机器人的定义:机器人是一种能自动定位、可控的可编程的多功能操作机。
这类操作机具有几个轴在可编程序操作下,能处理各种材料、零件、工具和专用装置,以执行各种任务。
美国国家标准(NBS)对机器人的定义:“一种可编程,并在自动化控制下执行某种特定操作和移动作业任务的机械装置。
”日本工业机器人协会对工业机器人的定义:“一种装备有记忆装置和最终执行装置,能够完成各种移动来代替人类劳动的通用机器。
”它又分为以下两种情况来定义:(1)工业机器人:“一种能执行与人的上肢类似动作的多功能机器。
”(2)智能机器人:“一种具有感觉和识别能力,并能够控制自身行为的机器。
”机械手由执行机构、驱动-传动系统和控制系统这三部分组成,如下图所示。
1.1.2机械手的类型机械手一般分为三类。
第一类是不需要人工操作的通用机械手,它是一种独立的不附属于某一主机的装置。
它可以根据任务的需要编制程序,以完成各项规定工作。
它的特点是除具备普通机械的物理性能外,还具备通用机械、记忆智能的三元机械。
第二类是需要人工操作的,称为操作机。
它起源于原子、军事工业,先是通过操作机来完成特定的作业,后来发展到用无线电信号操作机械手来进行探测月球、火星等。
本科毕业论文-基于单片机的多自由度机械手臂控制器设计
本科毕业论文-基于单片机的多自由度机械手臂控制器设计摘要:随着自动化技术的不断发展,机械手臂在工业生产中扮演着越来越重要的角色,越来越得到人们的关注。
现代机械手臂控制器尤其是多自由度机械手臂控制器的设计与实现成为了本领域中的研究热点。
本文基于单片机芯片设计了一种多自由度机械手控制器,采用了串行通信的方式从计算机发送命令控制机械手臂的动作。
在硬件设计方面,使用了AT89S52单片机作为主控制器,引入了五个伺服电机控制模块作为机械手的动力源,以及一组角度传感器作为手臂的姿态测量元件。
在软件设计方面,采用C语言编写程序,实现了机械手臂自动运动、复位、姿态检测等功能。
同时,对机械手臂的自动防撞、误操作检测等进行了设计。
最终实验表明,本文设计的多自由度机械手控制器具有较强的动作准确性和鲁棒性。
关键词:多自由度机械手,单片机,控制器,硬件设计,软件设计Abstract:With the continuous development of automation technology, the role of robotic manipulators in industrial production is becoming more and more important, and it has attracted more and more attention from people. The design and implementation of modern robotic controller, especially multi-degree-of-freedom robotic controller, has become a hot research topic in this field.In this paper, a multi-degree-of-freedom robotic arm controller based on MCU chip is designed, and the motion of the robotic arm is controlled by serial communication from the computer. In terms of hardware design, AT89S52 MCU is used as the main controller. Five servo motor control modules are introduced as the power source of the manipulator, and a set of angle sensors are used as the posture measurement element of the arm.In terms of software design, the program is written in C language, and the functions of automatic movement, reset and posture detection of the robotic arm are realized. At the same time, the automatic anti-collision and misoperation detection of the robotic arm are also designed. Finally, the experiment shows that the multi-degree-of-freedom robotic arm controller designed in this paper has strong motion accuracy and robustness.Keywords: multi-degree-of-freedom robotic arm, MCU, controller, hardware design, software design一、引言机器人技术早产业生产中广泛使用,将传统的出产系统向自动化和智能化方向推进。
基于单片机的多自由度机械手臂设计

基于单片机的多自由度机械手臂设计近年来,机器人技术蓬勃发展,越来越多的高新机器人先后亮相。
在各种机器人中,带机械手臂类机器人应用最为广泛。
带机械手臂的机器人能模仿人的肢体动作,代替人的工作,特别是在重物装卸,精细加工中有着非常重要的优势。
机械手臂关节的自由度、灵活性和准确性是机械手臂机器人的工作前提。
文章基于单片机,设计一个小型机器人的一只手臂能在空间四个自由度转动。
加入机械手的机械结构,通过对四个电机的正反转实验论证方案的可靠性和可行性。
标签:单片机;四自由度;机械手臂;电机引言机器手臂作为一种工业技术装备,它能代替人搬运物件或货物分拣操作。
近年来工业机器人在工厂自动化改革中发挥着巨大的作用,代替人处理一些高危险、高危害、高工作负荷的工作,大大加快了生产效率,缩减了生产周期。
然而在这些自动化生产中,机械臂机器人占了最大的比重。
如汽车生产中的无缝焊接,钢厂里的钢材打包分拣,都用到了机器人机械臂。
机器手臂具有三个部分组成:机械臂、控制部分和工作部分。
机械臂的大小,规格决定了机械臂的应用,转角轴等,控制部分工业上一般是工控机,通过编程设计控制机械臂进行相应的操作。
工作部分由具体工作事项决定,如电焊机器人的电焊手,搬运机器人的挂钩。
1 系统功能介绍本设计采用电动式多自由度机器机器手臂模型,应用单片机控制,步进电动机的方式来驱动。
该手臂具有四个关节,每个关节可以前后转动,手臂转动采用4台微型步进电机驱动,可以完成前后左右360度摆臂等简单动作,系统控制图如图1控制部分采用80C51单片机,完成对电机的控制,即完成对手臂转动的控制。
2 软硬件设计机械手臂在动力传动方式上有连杆式、齿轮式和绳索式等。
采用齿轮结构是主流的机械手发展趋势,因为齿轮式机械手臂传动精度高、结构紧、承载高等优点。
随着工业的发展,对机械手臂要求越来越高,机械手臂向多自由度发展。
本设计为了简单起见,选用第三种传动方式——绳索式。
2.1 机械结构4自由度机械臂采用四个步进电机控制,如图2,步进电机1控制底座,实现自由旋转,步进电机2、3、4可自由旋转,完成伸展、收缩等动作。
单片机控制三自由度圆柱坐标机械手设计
单片机控制三自由度圆柱坐标机械手设计一、引言随着科学技术的不断发展,机械手在工业生产、科研等领域扮演着越来越重要的角色。
机械手的设计是其中的关键环节之一,而单片机是机械手控制的核心部分之一、本文将介绍一种基于单片机控制的三自由度圆柱坐标机械手的设计。
二、机械手的结构设计该机械手的结构主要由三个旋转关节组成,分别对应三个自由度。
每个旋转关节由步进电机驱动,通过直线传动装置实现转动,并带有相应的位置反馈传感器。
三、单片机的选取单片机是机械手控制的核心部分,控制机械手的动作和位置。
单片机的选择需要考虑其计算性能、接口资源等方面的要求。
本设计选择了STM32系列的单片机,具有大容量的存储器和强大的计算能力,同时提供多种通信接口和模拟/数字接口,满足了机械手控制的需求。
四、电路设计电路设计包括电源电路、电机驱动电路和控制电路三个模块。
电源电路为电机驱动和单片机提供稳定的电源。
电机驱动电路采用步进电机驱动芯片,通过信号电平控制电机的转动。
控制电路主要由单片机和传感器组成,负责接收传感器的反馈信号,并控制电机的转动。
五、软件设计在单片机软件设计方面,本设计采用C语言进行编程。
通过编写相应的程序,实现机械手的运动控制,包括正向运动、逆向运动和位置控制等功能。
同时,还可以为机械手增加一些智能化的功能,如碰撞检测、路径规划等。
六、实验与结果将设计好的电路板焊接好后,进行实验测试。
通过对机械手的不同输入信号进行测试,观察机械手的运动情况,并对其进行调试。
最终,可以实现通过单片机控制的三自由度圆柱坐标机械手的正常运行。
七、总结本文设计了一种基于单片机控制的三自由度圆柱坐标机械手。
通过对机械手的结构和电路进行设计,选取合适的单片机和编写相应的控制程序,实现了机械手的运动控制。
该设计具有较高的可靠性和灵活性,可以广泛应用于工业生产和科研等领域。
基于51系列单片机的数控机械手的设计
336许红岩 吉林省经济管理干部学院摘要:对人类来说太脏、太危险、太困难、太反复无聊的工作,往往都由机器人代劳。
机械手也称为工业机器人,多用于工业流水线等工业生产中。
本文通过采用51系列单片机为主控制,步进电机为主动力,具有键盘控制,自动显示,三维进给功能的数控机械手,实现数控上的机器人供给功能。
关键词:工业机器人;机械手;单片机;步进电机中图分类号:TP242 文献识别码:A 文章编号:1001-828X(2018)034-0336-01机械手也叫做工业机器人,它是通过传感器与电机之间实现的动作连结,可以说这个连结不是由人类直接进行控制的,而是通过单片机作为主线,步进电机为主动力,实现机械手的移动,张开手臂或是关闭手臂,从而实现数控加工中物件的抓放。
因此通过51系列单片机实现此种直接而详尽的数控机械手的控制。
一、本系统设计方案本设计采用单片机作为控制单元,与采用PLC 控制相比,其最大的特点是:成本较低,灵活较高,方便操作,更利于检修。
采用步进电机作为主动力,对于精度控制来说也是较高的。
控制电路的设计中驱动主电路 HD44780及其扩展驱动电路 HD44100。
显示电路设计采用了字符型液晶显示屏,即 LCD 显示屏。
二、数控系统硬件设计(一)程序存储器设计若是单片机无内部ROM 或者程序较长造成内部ROM 不够用时,就需要程序存储器外接,而且在数据量大,内部ROM 不够用时,还需进行数据存储器RAM 的扩展。
由于MCS-51系列单片机中程序和数据存储器分别放置在两个不同的存储区,均可扩展到64KB 空间用于存储,因此更便于使用。
(二)数据存储器设计由于MCS-51单片机内部数据存储器具有128个字节,CPU 对内部 RAM 可以实现较多的操作指令,因此该 RAM 区是特别有用的资源,可以用于工作寄存器、软件标志、堆栈和数据缓冲器等多种功能。
本设计采用6264静态RAM 来扩展数据存储器。
6264是采用 CMOS 工艺制造的8 K×8位静态随机存储器芯片,采用单向+5 V 供电,额定功耗为150 Mw,典型存储空间为150 ns,封装形式为28线双列直插式封装。
基于单片机的机械手设计
基于单片机的机械手设计摘要机械手是一种能够模仿人类手臂运动的智能机器人。
本文介绍了一款基于单片机的机械手的设计。
该机械手由五个自由度组成,其运动控制系统由单片机控制。
该机械手具有定位精度高、反应速度快、操作简便等优点。
理论分析和实验结果表明,该机械手设计具有较高的实用性和普适性。
关键词:机械手;单片机;自由度;控制系统;精度1. 引言近年来,智能机器人领域蓬勃发展,机械手作为一种具有广泛应用前景的机器人,已成为研究热点。
机械手具有广泛的应用范围,如生产线上的自动化生产,医疗手术,危险环境中的救援等。
因此,基于单片机的机械手的设计及其控制系统研究具有重要意义。
2. 设计思路本文设计的机械手由五个自由度组成,能够完成抓取、举起、放置等基本操作。
本文的设计思路是基于单片机控制系统,通过驱动电机实现机械手的运动。
机械手的五个自由度分别为旋转、抬升、伸展、弯曲和手掌张合。
机械手的控制系统主要由单片机、电机驱动器和传感器组成。
其中,单片机采用STM32F407主控制器,并通过PWM信号控制电机运动。
传感器采用光电编码器对电机转速和位置进行反馈。
图2 机械手的控制系统机械手的驱动电机由直流电机和舵机组成。
直流电机主要用于实现伸展和弯曲动作,而舵机用于实现手掌张合动作。
机械手的轴承部件采用滚珠轴承,能够有效减小摩擦力,提高机械手的运动精度和操作稳定性。
3. 理论分析本文采用MATLAB建立机械手的数学模型,并进行了理论分析。
机械手在执行任务时需要完成一系列位置和姿态变化,因此,机械手的位置和姿态控制是机械手设计的重要指标。
机械手的位置精度取决于电机性能和轴承部件的精度。
电机性能包括电机的输出电功率、转速、转矩等。
机械手的姿态精度取决于机械手的运动学性能。
在不同姿态下,机械手的姿态解算需要通过角度解算和矩阵变换等方法进行计算。
在机械手的设计中,需要考虑机械手的运动学性能和机械手的实际操作需求。
4. 实验结果本文通过实验验证了机械手设计的有效性和性能优越性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
系统控制电路图
开始
系统 初始 化
检测有无 工件
检测工 件 是否红 色 电机M1 正传
电磁铁 通电
程序流程图
电机M1 反转
电机M2,M3 正传
位 置 检 测 电机M1 正传
电磁铁 断电
电机M1 反转
电机M2,M3 反传
位置 检测
循 环
控 制 结束
仿真电路
机械手运动轨迹
生
产 线
小臂运动回转轨迹
大臂运动 大臂轨摆迹动轨迹
总体设计方案
光电传感器
单
独立键盘
片
机
计算机
增量式光电 编码器
机械手电磁铁 驱动芯片
机械手抓手 伺服电机 传动部件 机械手手臂
机械手组成
机械手3D设计图
单片机及驱动芯片的选择
LMD18200逻辑真值表
PWM 转向 刹车 实际输出驱动电流
H
H
L 流出OUT1、流入OUT2
H
L
L 流入OUT1、流出OUT2
机械手参数
抓手伸缩长度: 重复定位精度: 最大速度: 控制器类型: 机械手重量: 编码形式: 驱动:
抓手:
25 mm 0.02 mm
5,5 m/s 单片机
4.8 kg 增量式
直流伺服 齿轮驱动 电磁铁
L
X
L 流出OU1T、流出OUT2
H
H
H 流出OUT1、流出OUT2
H
L
H 流入OUT1、流入OUT2
L XH
NONE
电机工作状态 正转 反转 停止 停止 停止
LMD18200控制信号
伺服电机
传感器选择
❖ 颜色值或颜色 模拟量输出0-10V ❖ 最大颜色选择度 ❖ 导向光束(红色) ❖ 响应时间,典型值:100µs ❖ 自 检功能 ❖ 独立放大器,1种颜色自学功能 ❖ 物体尺寸> 5 mm ❖ 信号强度0-10V ❖ 距离:5-200mm ❖ 白色光源 ❖ 达到32色自学功能的FSK存储卡 ❖ 任选附件 ❖ 防护等级IP 65 ❖ 光源,自适应颜色传感器和放大器
题目:筛选机械手设计
答辩学生:武继坤 指导老师:费凌
专业:机械电子工程
毕业设计任务与要求:
❖ 毕பைடு நூலகம்设计主要内容:
生产线上有红黑两种直径为2cm厚1cm的圆 铁片,设计一种机械手,该手能自动筛选出红色 铁片,并把红色铁片放到指定位置。由伺服电机 控制,控制电路和电机电路实现光电隔离,并要 求机械手有判别铁片颜色的功能,且能准确把握 铁片位置因素。该手运行路径合理,接近指定位 置时能够减速运行。整个过程无人工操作,系统 通过传感装置检测机械手位置,工作结束能自动 停止。 ❖ 完成该系统的硬件,软件设计; ❖ 编写适当的语言程序;