kmdf 驱动开发实例
嵌入式Linux驱动开发教程PDF

嵌入式Linux驱动开发教程PDF嵌入式Linux驱动开发教程是一本非常重要和实用的教材,它主要介绍了如何在Linux操作系统上开发嵌入式硬件设备的驱动程序。
嵌入式系统是指将计算机系统集成到其他设备或系统中的特定应用领域中。
嵌入式设备的驱动程序是连接操作系统和硬件设备的关键接口,所以对于嵌入式Linux驱动开发的学习和理解非常重要。
嵌入式Linux驱动开发教程通常包括以下几个主要的内容:1. Linux驱动程序的基础知识:介绍了Linux设备模型、Linux内核模块、字符设备驱动、块设备驱动等基本概念和原理。
2. Linux驱动编程的基本步骤:讲解了如何编译和加载Linux内核模块,以及编写和注册设备驱动程序所需的基本代码。
3. 设备驱动的数据传输和操作:阐述了如何通过驱动程序与硬件设备进行数据的传输和操作,包括读写寄存器、中断处理以及与其他设备的通信等。
4. 设备驱动的调试和测试:介绍了常用的驱动调试和测试技术,包括使用调试器进行驱动程序的调试、使用模拟器进行驱动程序的测试、使用硬件调试工具进行硬件和驱动的联合调试等。
通常,嵌入式Linux驱动开发教程的PDF版本会提供示例代码、实验步骤和详细的说明,以帮助读者更好地理解和掌握嵌入式Linux驱动开发的核心技术和要点。
读者可以通过跟随教程中的示例代码进行实际操作和实验,深入了解和体验嵌入式Linux驱动开发的过程和方法。
总之,嵌入式Linux驱动开发教程是一本非常重要和实用的教材,对于想要在嵌入式领域从事驱动开发工作的人员来说,具有非常重要的指导作用。
通过学习嵌入式Linux驱动开发教程,读者可以系统地了解和学习嵌入式Linux驱动开发的基本原理和技术,提高自己在嵌入式Linux驱动开发方面的能力和水平。
KMD(KernelModeDriver)的编写安装与调试

);
/*
* 在DDK文档中搜索DispatchWrite
*/
static NTSTATUS LoDispatchWrite
(
IN PDEVICE_OBJECT DeviceObject,
IN PIRP Irp
* 楚怎么回事,稳妥起见还是用INIT、PAGE算了。
*/
#ifdef ALLOC_PRAGMA
#pragma alloc_text( INIT, LoCreateDevice )
#pragma alloc_text( PAGE, LoDeleteDevice )
#pragma alloc_text( PAGE, LoDispatchClose )
☆ 编写dirs文件
☆ 编写sources文件
☆ 编写makefile文件
☆ 编译产生loopback.sys文件
☆ 编写loopback.inf文件
☆ 安装loopback.inf文件
☆ 卸载loopback.sys及相关设置
☆ installdriver.c
* Static Global Var *
* *
************************************************************************/
#pragma alloc_text( INIT, DriverEntry )
#endif
/************************************************************************
* *
KMDF驱动程序框架

第2章KMDF驱动程序框架由对象和事件回调例程构成。
KMDF框架中所有的事物都由对象来表示,各种事件处理都由事件回调例程来完成。
学习KMDF编程,主要是学习KMDF的各种对象、对象函数和事件回调例程的编程。
2.1 KMDF对象为了实现基于对象的技术,微软精心设计了对象模型并进行了封装,提供了属性、方法和事件。
无论是内核模式的驱动程序还是用户模式的驱动程序,都采用同一套对象模型构建,采用同一个基础承载。
2.1.1 对象概念对象是KMDF的基础,KMDF框架中所有的事物都由对象来表示,如Driver、Device、Request等。
下面介绍有关KMDF对象的基本知识。
1.对象包含属性、方法和事件属性(properties):可以获取或设置的一个数值。
13第2章KMDF驱动程序框架例如,IRP的对象是WDFREQUEST。
IRP的Information就是WDFREQUEST的一个属性,可以获取或设置,如下所示。
(1)ULONG_PTRWdfRequest Get Information(IN WDFREQUEST Request); //获取Information值(2)VOIDWdfRequest Set Information(IN WDFREQUEST Request,IN ULONG_PTR Information); //设置Information值上面两个属性操作没有失败一说,但有些属性操作可能会失败,由一个操作是否成功的Status状态来表示。
比如:Status = WdfRegistry Assign Value();Status = WdfRegistry Query Value();Status = WdfRequest Retrieve InputBuffer();方法(methods):对对象操作的函数。
比如:status = WdfDriverCreate(); //创建驱动对象事件(events):当特定事件发生时,KMDF调用事件例程。
windows设备驱动程序WDF开发(1)
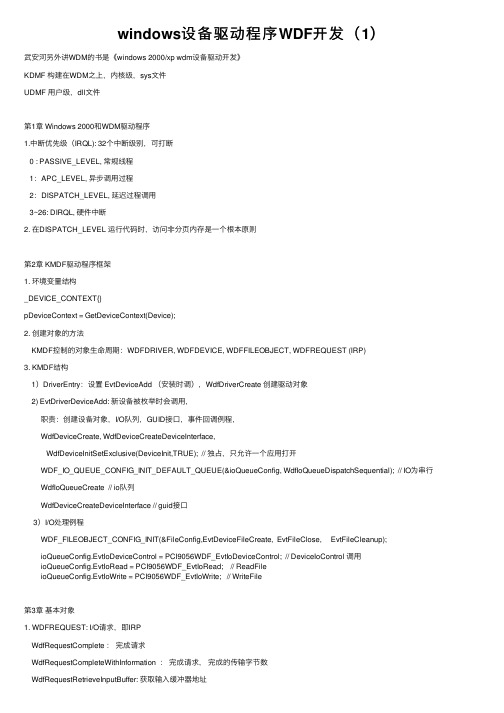
windows设备驱动程序WDF开发(1)武安河另外讲WDM的书是《windows 2000/xp wdm设备驱动开发》KDMF 构建在WDM之上,内核级,sys⽂件UDMF ⽤户级,dll⽂件第1章 Windows 2000和WDM驱动程序1.中断优先级(IRQL): 32个中断级别,可打断0 : PASSIVE_LEVEL, 常规线程1:APC_LEVEL, 异步调⽤过程2:DISPATCH_LEVEL, 延迟过程调⽤3~26: DIRQL, 硬件中断2. 在DISPATCH_LEVEL 运⾏代码时,访问⾮分页内存是⼀个根本原则第2章 KMDF驱动程序框架1. 环境变量结构_DEVICE_CONTEXT{}pDeviceContext = GetDeviceContext(Device);2. 创建对象的⽅法KMDF控制的对象⽣命周期:WDFDRIVER, WDFDEVICE, WDFFILEOBJECT, WDFREQUEST (IRP)3. KMDF结构1)DriverEntry:设置 EvtDeviceAdd (安装时调),WdfDriverCreate 创建驱动对象2) EvtDriverDeviceAdd: 新设备被枚举时会调⽤,职责:创建设备对象,I/O队列,GUID接⼝,事件回调例程,WdfDeviceCreate, WdfDeviceCreateDeviceInterface, WdfDeviceInitSetExclusive(DeviceInit,TRUE); // 独占,只允许⼀个应⽤打开WDF_IO_QUEUE_CONFIG_INIT_DEFAULT_QUEUE(&ioQueueConfig, WdfIoQueueDispatchSequential); // IO为串⾏ WdfIoQueueCreate // io队列WdfDeviceCreateDeviceInterface // guid接⼝3)I/O处理例程WDF_FILEOBJECT_CONFIG_INIT(&FileConfig,EvtDeviceFileCreate, EvtFileClose, EvtFileCleanup);ioQueueConfig.EvtIoDeviceControl = PCI9056WDF_EvtIoDeviceControl; // DeviceIoControl 调⽤ioQueueConfig.EvtIoRead = PCI9056WDF_EvtIoRead; // ReadFileioQueueConfig.EvtIoWrite = PCI9056WDF_EvtIoWrite; // WriteFile第3章基本对象1. WDFREQUEST: I/O请求,即IRPWdfRequestComplete :完成请求WdfRequestCompleteWithInformation :完成请求,完成的传输字节数WdfRequestRetrieveInputBuffer: 获取输⼊缓冲器地址WdfRequestRetrieveInputMemory: 获取输⼊缓冲器地址,形式为WDFMEMORYWdfRequestRetrieveInputWdmMdl: 获取输⼊缓冲器地址,形式为MDLWdfRequestGetIoQueue:返回队列对象WdfRequestGetFileObject: 返回⽂件对象WdfRequestGetInformation: 完成的传输字节数WdfRequestCreate: 创建IO请求2. IO请求(IRP)基本操作取消IO请求:编写取消例程向下传递IO请求3. WDFQUEUE 队列, WdfIoQueueDispatchSequential 串⾏初始化默认队列 WDF_IO_QUEUE_CONFIG_INIT_DEFAULT_QUEUEWdfIoQueueCreateWdfIoQueueStart : 启动接收和分发IRPWdfIoQueueStop:暂停分发,但还接收WdfIoQueueDrain: 停⽌接收,但分发WdfIoQueuePurge: 停⽌接收,取消队列中的IRP4. WDFTIMER, WDFDPC, WDFWORKITEM, WDFMEMORY5. 数据同步1)⾃旋锁运⾏在DISPATCH_LEVEL(⾃动提升),因此不能访问分页内存WdfSpinLockCreate, WdfSpinLockAcquire, WdfSpinLockRelease2)WDFWAITLOCK 运⾏在PASSIVE_LEVEL, 同步锁WdfWaitLockCreate, WdfWaitLockAcquire, WdfWaitLockRelease6. 字符串CHAR, WCHAR, STRING, UNICODE_STRINGWDFSTRING: WdfStringCreate串处理函数:strlen之类7. 队列编程 QueueSample// 因为取消例程等要⽤环境变量,所以⽤⼀个设备对象范围同步(重要)deviceAttr.SynchronizationScope = WdfSynchronizationScopeDevice;调⽤例程,取消例程,定时器回调例程,都⽤了设备对象范围同步,所以运⾏在DISPATCH_LEVEL,不能⽤分页内存。
欧姆龙控制伺服电机的程序实例
欧姆龙控制伺服电机的程序实例一、程序准备:1.准备欧姆龙 PLC 控制器,并通过计算机连接PLC,进行编程;2.伺服电机,其输入端和输出端分别接入控制器;3.控制器软件,包括指令模板及编程语言等。
二、程序的编写:1.编写控制程序,完成伺服电机操作。
2.为节点内部的内容定义一个可编程节点地址,以满足节点的要求。
3.设定伺服电机的输入参数,如输入电压、电流、电压限制等。
4.定义伺服电机的输出参数,如位置控制输出参数、速度控制输出参数等。
5.编写软件参数准备程序,来读取PLC上设定的伺服电机参数,并定义控制方式。
7.定义伺服电机运行中的状态,如模式选择、速度切换、运行时间等。
8.将控制及状态程序进行编程,实现与伺服电机的集成。
9.编写调试程序,检查程序功能,保证在正常运行过程中,伺服电机机械及控制系统的正常运行。
10.将程序下载到控制器中,然后检查程序是否运行正常,确认控制功能及状态输出是否准确无误。
三、启动操作:1.连接控制器,确保控制器与伺服电机的连接状态是正确的;2.开机,查看控制器的运行状态,确保控制器正常运行;3.运行下载的控制程序,开始伺服电机的运行;4.观察伺服电机的运行情况,如果发现问题,根据情况检查是否有对程序的设置错误;5.确认没有问题,持续观察控制器的运行情况,确保伺服电机连续正常工作。
四、总结:以上是欧姆龙 PLC 控制伺服电机的程序实例,它需要通过控制器上载编程软件,并通过程序的编写、参数设置、调试实现伺服电机的控制。
总之,欧姆龙 PLC 控制伺服电机的程序是一个复杂的系统,需要技术人员具备丰富的编程经验,才能完成控制伺服电机的任务。
关于WDK目录

关于WDK目录Microsoft Windows Driver Kit (WDK) 包含几个单独的组件。
如果您了解WDK 的结构,您就将知道各种支持文件和信息的查找位置。
默认情况下,WDK 组件将安装到计算机硬盘驱动器上的WDKInstallationPath\BuildNumber\ 文件夹中,其中WDKInstallationPath 为WDK 安装到的计算机上的根目录位置(例如,C:\WinDDK),而 BuildNumber 为安装的 WDK 的内部版本号(例如 5600)。
这些组件将在安装WDK 的过程中复制到计算机上,具体取决于您在WDK 安装向导中选择的选项。
最常见的WDK 组件将安装到主WDK 安装文件夹下的以下子目录(如 C:\WinDDK\5600)中:\ (the WDK root directory)WDK 根目录(如C:\WinDDK\5600\)包含WDK 发行说明(Relnotes.htm)。
这些发行说明包含有关WDK 的最新信息,并经常包含有关对头文件和生成环境的更改的有用信息。
虽然可以考虑忽略发行说明,但强烈建议您阅读WDK 发行说明(通常您值得花时间这样做)。
\bin\\bin 目录包含支持WDK 生成环境的可执行映像和命令过程。
该目录中的文件包括编译器、链接器和其他支持文件。
通常无需直接访问或修改该目录中的文件。
\debug\\debug 目录包含操作系统映像和硬件抽象层(HAL) 的调试版本及其关联的符号文件。
这些文件可在您调试驱动程序时为您提供帮助。
有关调试版本和符号文件的内容及其使用方式的更多信息,请参见 Windows 的调试版内部版本。
\help\\help 目录包含 Microsoft HTML Help 2.0 格式的 WDK 文档文件。
可通过以下操作查看帮助文件:单击“开始”按钮,再依次指向“所有程序”、“Windows Driver Kits”(Windows 驱动程序包)、“WDK 内部版本号”和“Help”(帮助),然后单击“WDK Documentation”(WDK 文档)。
单电机驱动实验报告(3篇)
第1篇一、实验目的本次实验旨在通过实际操作和数据分析,掌握单电机驱动的基本原理,了解电机驱动电路的设计方法,熟悉电机驱动实验的操作流程,并学会通过实验验证电机驱动系统的性能。
二、实验原理单电机驱动系统主要由电机、驱动电路、控制器和电源等组成。
实验中,我们采用直流电机作为驱动电机,通过PWM(脉冲宽度调制)信号控制电机的转速和转向。
驱动电路采用H桥电路,通过控制H桥电路中晶体管的导通与截止,实现对电机的正反转和调速。
三、实验设备1. 直流电机:型号为NMB 2406KL-04W-B36,额定电流0.14A。
2. 驱动电路:H桥电路,由四个晶体管组成。
3. 控制器:采用Arduino Uno开发板,通过编写程序控制PWM信号输出。
4. 电源:可调稳压电源,输出电压范围0-24V。
5. 测量仪器:万用表、示波器、光电反射式转速表等。
四、实验步骤1. 搭建实验电路:将直流电机、H桥电路、Arduino Uno开发板和电源连接起来,确保电路连接正确。
2. 编写程序:使用Arduino IDE编写程序,控制PWM信号的输出,实现对电机的正反转和调速。
3. 调试程序:通过调整程序中的参数,观察电机运行情况,确保程序运行稳定。
4. 测试电机性能:使用光电反射式转速表测量电机在不同PWM占空比下的转速,记录数据。
5. 分析实验结果:根据实验数据,分析电机驱动系统的性能,如转速稳定性、调速范围等。
五、实验结果与分析1. 转速稳定性:通过调整PWM占空比,观察电机转速的变化。
实验结果表明,电机转速随PWM占空比的增大而增大,且在稳定运行时,转速波动较小,说明电机驱动系统的转速稳定性较好。
2. 调速范围:实验中,我们测试了电机在不同PWM占空比下的转速,结果表明,电机驱动系统的调速范围较宽,可满足实际应用需求。
3. 转向控制:通过改变PWM信号的极性,实现电机的正反转,实验结果表明,电机转向控制准确,无抖动现象。
六、实验总结通过本次实验,我们掌握了单电机驱动的基本原理和实验操作流程,了解了电机驱动电路的设计方法。
基于windows的c++驱动程序编写过程

基于windows的c++驱动程序编写过程在 Windows 操作系统上编写 C++驱动程序需要遵循特定的步骤和使用相关的工具。
以下是一般的编写过程概述:1. 选择驱动程序类型:首先,你需要确定要编写的驱动程序类型,例如设备驱动程序、文件系统驱动程序或网络驱动程序等。
不同类型的驱动程序有不同的功能和要求。
2. 了解 Windows 驱动模型:Windows 提供了两种主要的驱动模型:WDM(Windows Driver Model)和 KMDF(Kernel-Mode Driver Framework)。
WDM 是较旧的驱动模型,而 KMDF 是推荐使用的现代驱动模型。
了解所选择的驱动模型的架构和概念对于编写驱动程序非常重要。
3. 安装开发工具和头文件:你需要安装适当的开发工具,如 Visual Studio,以及相关的 Windows 驱动开发工具包(DDK)或 Windows Driver Kit(WDK)。
这些工具包提供了必要的头文件和库文件。
4. 创建驱动程序项目:使用开发工具创建一个驱动程序项目。
你可以选择创建一个空项目或使用驱动程序模板。
5. 编写驱动程序代码:根据所选择的驱动模型,编写驱动程序的功能代码。
这包括设备初始化、设备控制、数据传输等。
你需要使用相关的 Windows API 和驱动程序特定的函数来实现所需的功能。
6. 配置驱动程序属性:在项目属性中,设置驱动程序的相关属性,如驱动程序类型、版本号、制造商等。
7. 构建和调试驱动程序:使用开发工具构建驱动程序,并进行调试。
你可以使用调试器来检查代码的执行情况,并解决可能出现的问题。
8. 测试和部署驱动程序:在开发环境中测试驱动程序,确保其正常工作。
然后,你可以将驱动程序安装到实际的设备上进行测试。
需要注意的是,编写 Windows 驱动程序需要深入了解操作系统的内部机制和相关的编程概念。
此外,驱动程序的开发和调试过程可能比较复杂,需要耐心和经验。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
kmdf 驱动开发实例
驱动开发是通过编写内核模块来与操作系统进行交互的一种技术。
而在Windows操作系统中,驱动开发的一种常见框架是Kernel-Mode Driver Framework(KMDf)。
本篇文章将以KMDf驱动开发实例为主题,逐步解释该实例的步骤和过程。
第一步:准备环境和工具
在进行KMDf驱动开发之前,首先需要准备好相应的环境和工具。
这包括一台运行Windows的计算机、安装好Windows Driver Kit(WDK)和Visual Studio等开发工具。
第二步:创建驱动项目
打开Visual Studio,选择新建项目(New Project),在模板(Templates)中找到"Kernel Mode Driver (KMDF)",然后填写项目名称和所需的目标Windows版本等信息。
这样就创建了一个KMDf驱动项目。
第三步:配置驱动项目
在创建驱动项目后,需要对其进行配置。
这包括设置编译选项、指定目标平台、选择所需的驱动框架版本等。
配置完成后,可以开始编写驱动代码。
第四步:编写驱动代码
在KMDf驱动项目中,主要的代码文件是驱动的入口点(DriverEntry),
该函数在驱动加载时被调用。
在该函数中,可以进行一些初始化操作,如注册驱动、创建设备对象、为设备对象添加I/O回调函数等。
接下来,可以根据实际需求,编写其他的驱动逻辑代码。
例如,可以添加设备控制代码、I/O处理代码、定时器代码等。
这些代码将在驱动运行时被调用,以实现相应的功能。
第五步:编译和生成驱动
在编写完驱动代码后,可以进行编译和生成驱动。
在Visual Studio中,选择生成解决方案(Build Solution),这将会将源代码编译成二进制文件。
生成的驱动文件会放置在指定的输出目录中。
第六步:安装和加载驱动
生成驱动文件后,需要将其安装到操作系统中并加载。
在Windows中,可以使用DevCon等命令行工具来完成这一步骤。
通过执行相应的命令,将生成的驱动文件复制到系统文件夹中,并使用sc命令加载驱动。
第七步:验证驱动功能
安装和加载驱动后,可以对其进行功能验证。
这可以通过编写相应的测试应用程序来完成。
测试应用程序可以使用驱动提供的接口进行设备访问、数据读写、功能测试等操作,以验证驱动的正确性和可靠性。
第八步:调试和优化
在验证驱动功能之后,可以进行调试和优化。
可以使用Visual Studio提供的调试工具来检查驱动的运行时状态、变量值等信息,以及进行断点调试、单步执行等操作。
在调试过程中,可以发现和修复潜在的问题,优化代码以提高性能和可靠性。
总结:
本文以KMDf驱动开发实例为主题,详细介绍了一步一步的驱动开发流程。
从准备环境和工具,到创建驱动项目、配置和编写驱动代码,再到编译和生成驱动,最后是安装、加载、功能验证和调试优化等步骤。
通过按照这个流程进行驱动开发,可以帮助开发者理清思路、降低开发难度,并且实现高效的驱动开发。
驱动开发是一项需要耐心和细心的技术,但只要掌握了基本的开发步骤和技巧,便能够很好地进行驱动开发工作。