CATIAV人机培训应用
CATIA_V5培训教程
CATIA V5培训教程一. CATIA V5构架与模块1、CATIA V5构架总览构架分为四部分:(1) CATIA V5主程序:为核心,所有的设计、制图/加工和模拟等操作都是再次构架下完成。
(2) CATIA V5在线帮助:包含所有主程序模块的时用说明、技术文件和操作实例。
(3) CAA V5:CAA(Component Application Architecture)提供用户在开发的接口,使用户可以在Microsoft Vistual C++6.0下,通过API调用程序核心,并在此基础上进行开发。
(4) CATIA LUM:是CATIA的License(许可)管理工具,可以管理CATIA的许可使用,并建立License Server(许可服务器)。
2、CATIA V5的模块总览以CATIA V5.11为例,它提供以下几种模块,每种模块中又有数个子单元。
(1)基础构架Infrastructure提供管理整个CATIA 构架的功能,包括Product Structure、Material Library、Catalog Editor、Rendering等:(2)机械设计Mechanical Design包含机械设计的相关单元,主要有以下几部分组成:(3) 造型Shape提供曲面与逆向工程设计单元,可以自由塑造不规则曲面,利用手绘草图来构件曲面。
(4) 分析与仿真Analysis & Simulation提供实体的网格划分(mesh)与静力、共振等有限元分析功能,并可输出网格分割数据共其它分析软件使用。
(5)APC 工厂布局提供工厂的规划建制功能。
(6) 数控加工NC Manufacturing包含两轴到五轴加工的编程能力,并支持快速原型功能(STL Rapid Prototyping)。
(7) 数字化仿真Digital Mockup包含动态机构仿真、装配配合空间分析、产品功能分析与功能优化等。
CATIA_V5人机培训应用

CATIA V5人机培训与应用1.Human Builder(人体模型建立)人体模型的建立是基于最佳人体模型分类系统的。
人体模型能够非常精确地模拟人体以及人如何与产品互动,这样确保能够像真人一样在工作间自然地操作并完成各种作业。
“人体模型建立”模块侧重于建立一个用于互动分析的数字化人体模型。
此模块包含一些高级工具来创建、操作、分析一个人体模型(基于5th、50th、95th的人体百分比)是如何与产品发生互动的。
人体模型用来评估人与产品关于外形、相配、功能的适应性。
人体模型可以直观地创建和操作并结合DMU来检查诸如伸及范围、视野等特征。
简便易学的互动可以通过一个非人类学家来操作人体上面的各类参数。
工具栏中包括人体模型的生成、性别、百分位、正/反运动学操作、动画生成、单眼/双眼视野仿真以及视野圆锥。
1.1.Human Builder Menu Bar1.1.1.Standard Manikin Creation点击Manikin Creation图标,出现New Manikin对话框:1.1.1.1.Manikin Tab:Father Product:人体模型必须附加在左边树形图的一个Product内,这个Product可以是任何级别的,但不可以是其他任何人体模型。
Manikin name: 在这里为新建的人体模型命名,如:驾驶员、乘客、机械工等。
多个人体模型可以有同一个名字,如果将这栏空白,系统默认命名为Manikin1 (2, 3, etc.),并且保存为Manikin1.CATProduct。
Gender: 在这里选择人体模型的性别。
Percentile: 可以选择从1%至99%的人体百分位。
1.1.1.2.Optional TabPopulation:这里选择人体模型的国籍,系统默认有:美国、加拿大、法国、日本、韩国。
Model: 这里选择希望得到的人体模型的类别,系统提供三种:全身、只有左臂、只有右臂。
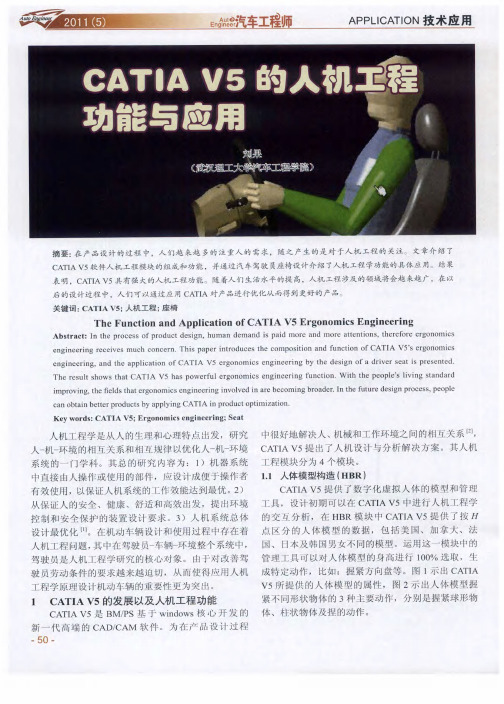
CATIA V5的人机工程功能与应用
2 0 : 5— 6 0 2 1 1.
由于 驾驶 人 员 的 身材 有 差 异 ,可 以再 选 取 9 5百
【】张 立 斌 . 机 工程 学 及其 在汽 车设 计 中 的应 用 []汽 车 运 用, 5 人 J.
20 9 ( ): 00百分 位 的人 体 模 型 ,确 定 出驾 驶 员座 椅 设
( 稿 日期 : 001 —8 收 2 1 .20 )
( 上接 第3页) 8
电动汽 车动 力传 动系 统参数 设 计及合 理 匹配对 其 性能有 很大 的影 响 。根 据 整车动 力 性要求 ,通 过理论
计 算 ,对 电动汽 车 电机 、电池和 传动 系统 进行 匹配计
誓 ¨ 凸 星 j
需将 人体 模型 直接 放入 到所 考 虑 的设备 之 中,减 少 了
制 作 人体 模 型 的过程 ,而 且在 C T A V5中可 以对 人 A I
图 2 人体 模 型 的 修 改
体数据 进 行调 整 ,如 图 1 图 2所 示 ,使得人 体 模型 和
1 人体 测量编辑 ( . 2 HME) 此 模块 可 以通 过人 体测 量 学工 具生 成较 为 高级 的
真 结果 表 明, 电动 汽车 的最 大车 速 、加 速 性和爬 坡性
等 动 力性能 能够满 足 设计 的要求 ,说 明整车 匹配 方案
【 4 】朱正礼,殷承 良,张建武 .基于遗传算法的纯电动汽车动力总成参 数优化 [] J.上海交通大学学报,2 0 ,3 1):10 -9 2 0 4 8(1 9 717 .
参 数满 足 实际要 求 。 由于 驾驶者 身 材各 异 ,所 以在设 计 时必须 对 人机
用 户 自定义人 体模 型 ,从 而使 人体 模 型与 驾驶 员 的模 工程 进行 仔 细研 究 ,确 定其尺 寸 J 于操 作姿 势来 。对 型 吻合 ,得到 更 为精确 的数 据 。在 此模 块 中系 统预 设 说 ,行驶 过程 中驾 驶 员 的脚 始 终放 在踏 板上 , 由于不 了立姿 、 平举 、延伸 平 举 、侧平 举 、坐姿 和跪 姿 6种 同工况 踏板 的角 度 也是有 变化 的,通过试 验 ,由座 椅 、 前 姿势 。可 以根据 实 际要 求先 预 设 1种姿 势 ( 驾驶 员 踏 板和 转 向盘 的位 置 以及驾 驶姿 势参 数 的变化 得 到驾 如 的坐 姿 )然 后在 该姿 势 的基础 上进 行修 改 。
CATIA V5培训教程

工程图设计
05
工程图设计基础
了解工程图的基本概念和术语 学习工程图的投影原理和视图表达方法 掌握工程图中常用的线条、符号和标注方法
工程图视图创建与编辑
1
学习创建基本视图、辅助视图和局部视图的方法
2
掌握视图的编辑和修改技巧,如移动、旋转、缩 放等
了解视图的显示和隐藏控制
了解CATIA V5草图 设计界面及工具栏
掌握草图设计的基本 流程和步骤
学习草图设计的基本 原则和规范
草图绘制工具
学习使用直线、圆弧、圆等基本图形 绘制工具
了解并练习使用样条曲线、螺旋线等 特殊图形绘制工具
掌握使用矩形、多边形等复杂图形绘 制工具
草图编辑与修改
学习使用修剪、延伸、倒角等编辑工具对草图进行修改 掌握使用镜像、阵列等变换工具对草图进行高效编辑
管件和阀门设计
创建各种管件和阀门的3D模型,并将其集成到管路系统中。
管路分析和验证
对管路系统进行流体动力学分析,验证设计的合理性和性能。
模具设计功能
模具分型面设计
利用CATIA V5的模具设计工具,进行模具分型面的设计和优化 ,确保模具的顺利脱模和产品质量的稳定性。
浇注系统设计
设计合理的浇注系统,包括主流道、分流道和浇口等,以确保塑 料在模具内的流动平衡和填充效果。
CATIA V5培训教程
contents
目录
• CATIA V5基础介绍 • 草图设计 • 零件设计 • 装配设计 • 工程图设计 • CATIA V5高级功能介绍
CATIA V5基础介绍
01
CATIA V5概述
CATIA V5是一款高端的三维 CAD/CAM/CAE软件,广泛应 用于航空航天、汽车、机械等领
CATIAV5人机基础培训5

每一个参数都可以通过点击 + 去定义: Auto (No or Yes) –指定使用RULA Yes –在指定情况下的部位强制使用RULA No –在非指定情况下的部位强制使用RULA
DELMIA V5 Training
D&A Technology (Shanghai) Co., Ltd.
在此章节中,我们将学习如何使用Lift-Lower Postural analysis ,并用结果作为参考 进行调整。
参考 online documentation
工作姿态
Time worked without a break
工作最大时间
:对于分析的结果,我们会以1-7的评分进行描述:
1 and 2 (绿色) –这个评分表示只要不是长时间的维持或重复的情况下,此姿态可以接受,符合要求。 3 and 4 (黄色) –.这个评分表示此姿态需要再评估,可能需要调整。 5 and 6 (橙色) – 这个评分表示此姿态需要调整。 7 (红色) –这个评分表示此姿态需要马上调整。.
这一章节我们将学习如何用RULA去分析,并用分析的结果去调整。
DELMIA V5 Training
D&A Technology (Shanghai) Co., Ltd.
4 人体行为分析
RULA上肢评估– 步骤
1 打开V5 2 选择Start / Ergonomics Design & Analysis / Human Activity Analysis. 3 打开 Product5.CATProduct
目标
我们将学习:
Rapid Upper Limb Assessment (RULA)快速上肢评估
CATIA V5人机 基础培训3

Module 2
DELMIA V5 Training
D&A Technology (Shanghai) Co., Ltd.
创建人体模型和工作区
概述
人体模型构造器是基于同类中最佳人体模型系统,该系统关联于已存物 理场景进行以人为中心设计论证的调查采集。人体模型构造器定位于在数字 化工作区内创建和操控人体数字模型,以进行人机交互分析。
7. 在当前工作环境里插入一个已存无用的人体模型,并将其定位在: Along X (-10.114in), Along Y (-45.062in), Along Z (0in)。
DELMIA V5 Training
D&A Technology (Shanghai) Co., Ltd.
创建人体模型和工作区
D&A Technology (Shanghai) Co., Ltd.
创建人体模型和工作区
创建工作区——插入人体模型流程
1. 通过主菜单选择“插入 / 新的人体模型”在工作区插入人体模型,弹出的“新人体模型” 对话框如下:。
人体模型选项包含的内容如下: 父层级产品 —— p人体模型在PPR结构树上所依附的产品 人体模型名称 —— 用户预定义标识 性别 —— 人体模型的性别 百分位 —— 标识人体模型所归属的百分位,其值决定着人体 模型的身高和体重。可选值的范围 在0.01到99.9.
DELMIA V5 Training
D&A Technology (Shanghai) Co., Ltd.
练习:搭建工作区
30 min.
内容:搭建工作区和插入人体模型 前提:必须打开DELMIA V5 人体模型构造器平台
详细操作:
基于CATIA V5人机工程学分析方法在康复器械中的应用研究
基于CATIA V5人机工程学分析方法在康复器械中的应用研究摘要基于人机工程学理论,利用CATIA V5为平台,以康复器械为对象,根据伤残患者对康复器械的需求,构建三维人机模型,模拟人使用康复器械的过程,并且对舒适性等指标进行测试,从而方便改进产品的缺陷和不足。
关键词人机工程;康复器械;仿真模型前言近几年来康复器械行业飞速发展,平均增速在25%到30%之间,远高于国民经济平均增长水平,我国庞大的人口基数决定了对康复器械的巨大需求。
以辅助器械为代表的残疾人服务产业兼具经济效益和社会效益,具有广阔的发展前景。
康复器械的设计与人体的各项生理参数及人机尺寸密切相关,本文中基于人机工程学理论,依据人体数据库建立人体模型,利用软件模拟人机过程,以数据为支撑分析人机环境,为康复器械优化提供科学依据,设计效率大幅提高,缩短开发周期,把康复产品真正的从理论到设计,制造一体化。
1 CATIA的人机工程模块1.1 标准人体模型的构造CATIA V5的HBR模块是在虚拟环境中建立和管理标准的数字化“虚拟”人体模型,在产品设计的初期阶段进行人机工程学交互分析。
HBR提供的工具包括:人体模型生成,性别和身高百分比定义,人机工程学产品生成,人机工程学控制技术,动作生成及高级视觉仿真等。
CATIA V5提供的人体数据库中包括美国人,法国人,韩国人,可以调用全身模型;提供的参考点包括:眼睛参考点,左脚参考点,右脚参考点,胯部参考点,最低脚参考点,默认参考点。
本文是根据中国男性的人体具体尺寸自行建立的人体模型,人体数据采用第50百分位[1]。
1.2 人体测量编辑CATIA V5的HME模块提供了6种预设姿势包括:立姿,侧平举,坐姿,跪姿,前平举,延伸平举。
可以对人体模型预先设定1种姿势,然后在此姿势的基础上进行修改。
HME模块允许设计人员通过人体测量学工具生成自定义的人体模型,模块可以对人体模型工作空间进行分析,评价人体和产品的吻合度。
2024年CATIAV5培训教程

CATIAV5培训教程一、引言随着科技的飞速发展,计算机辅助设计(CAD)软件在工业设计、建筑设计、航空航天、汽车制造等领域发挥着越来越重要的作用。
CATIAV5作为一款功能强大的CAD软件,已经成为全球众多企业和设计师的首选工具。
本教程旨在为初学者提供系统的CATIAV5培训,帮助读者快速掌握软件的基本操作和实用技巧。
二、CATIAV5简介1.CATIAV5概述CATIAV5是法国达索系统公司开发的一款CAD/CAE/CAM一体化软件,具有强大的三维建模、工程分析、制造仿真等功能。
自1982年问世以来,CATIAV5不断更新迭代,已经成为全球领先的CAD软件之一。
2.CATIAV5应用领域CATIAV5广泛应用于航空航天、汽车制造、造船、机械制造、建筑、消费品等领域。
通过使用CATIAV5,设计师可以更加高效地完成产品的设计、分析和制造。
三、CATIAV5基础操作1.界面布局CATIAV5的界面布局分为菜单栏、工具栏、工作区、命令提示栏和状态栏。
用户可以通过菜单栏访问软件的各项功能,通过工具栏快速执行常用命令,在工作区进行模型创建和编辑。
2.基本操作(1)新建文件:菜单栏“开始”→“机械设计”→“零件设计”,创建一个新的零件文件。
(2)选择对象:单击鼠标左键选择单个对象,拖动鼠标框选多个对象。
(3)移动、旋转、缩放:选中对象后,使用工具栏中的相应按钮进行移动、旋转和缩放操作。
(4)撤销和重做:工具栏中的撤销和重做按钮,可以撤销或恢复上一步操作。
3.视图操作(1)视图调整:通过工具栏中的视图控制按钮,可以切换正视、左视、俯视等视图。
(2)视图旋转:按住鼠标中键并拖动,可以自由旋转视图。
(3)视图缩放:滚动鼠标中键或按住Shift键并拖动鼠标中键,可以缩放视图。
四、CATIAV5功能模块1.零件设计零件设计是CATIAV5的核心模块,用户可以通过草图、拉伸、旋转、扫掠等命令创建三维模型。
2.曲面设计曲面设计模块提供了丰富的曲面创建和编辑工具,如放样、扫掠、填充等,可以创建复杂的曲面模型。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CATIA V5人机培训与应用1.Human Builder(人体模型建立)人体模型的建立是基于最佳人体模型分类系统的。
人体模型能够非常精确地模拟人体以及人如何与产品互动,这样确保能够像真人一样在工作间自然地操作并完成各种作业。
“人体模型建立”模块侧重于建立一个用于互动分析的数字化人体模型。
此模块包含一些高级工具来创建、操作、分析一个人体模型(基于5th、50th、95th的人体百分比)是如何与产品发生互动的。
人体模型用来评估人与产品关于外形、相配、功能的适应性。
人体模型可以直观地创建和操作并结合DMU来检查诸如伸及范围、视野等特征。
简便易学的互动可以通过一个非人类学家来操作人体上面的各类参数。
工具栏中包括人体模型的生成、性别、百分位、正/反运动学操作、动画生成、单眼/双眼视野仿真以及视野圆锥。
1.1.Human Builder Menu Bar1.1.1.Standard Manikin Creation点击Manikin Creation图标,出现New Manikin对话框:1.1.1.1.Manikin Tab:Ergonomics Design & AnalysisHuman Measurement EditorHuman Activity Analysis Human BuilderHuman Posture AnalysisFather Product:人体模型必须附加在左边树形图的一个Product内,这个Product可以是任何级别的,但不可以是其他任何人体模型。
Manikin name: 在这里为新建的人体模型命名,如:驾驶员、乘客、机械工等。
多个人体模型可以有同一个名字,如果将这栏空白,系统默认命名为Manikin1 (2, 3, etc.),并且保存为Manikin1.CATProduct。
Gender: 在这里选择人体模型的性别。
Percentile: 可以选择从1%至99%的人体百分位。
1.1.1.2.Optional TabPopulation:这里选择人体模型的国籍,系统默认有:美国、加拿大、法国、日本、韩国。
Model: 这里选择希望得到的人体模型的类别,系统提供三种:全身、只有左臂、只有右臂。
Referential:这里选择人体模型上面的参考点,有:眼点、H点(默认)、左脚、右脚、脚底、胯部。
Set Referential to Compass Location:如果这个参数是激活的,就可以使用罗盘指定人体模型的初始位置,如:一个平整的地板。
如果这个参数没有被激活,人体模型就会被放置在系统默认的位置中(坐标原点)。
1.1.2.Changing Manikin Display Attributes点击Display Attributes图标,里面包含:1.1.2.1.Manikin这个栏是空的直到鼠标选择了一个人体模型,选择后,人体模型的名字就会显示在这里。
在这个命令打开后,可以不断地选择其他人体模型,但是选择了新的模型后,前一个就被新的模型替代掉了,并更新相应的名字。
1.1.2.2.显示方式:segments, ellipses, and surfaces。
三种显示方式同时选择至少一种。
1.1.2.3.Center of gravity这里的重心是不可以被做任何操作的。
重心会随着人体各部分的变化而变化,1.1.2.4.Line of sight视线是用来方便处理人体模型的视野的,这条蓝色的线像其他部分一样可以被点选。
例如,它可以在Forward Kinematics 命令中被操作。
1.1.2.5.Resolution辨析率表示每一个绘制表征人体模型的曲面的椭圆上面的点的数量。
系统默认值为32,它的变化范围是4到128。
1.1.3.Inverse Kinematics Behaviors1.1.4.Assigning Descriptions (Memos)点选备忘录图标,选择要写备忘录的人体模型,备忘录窗口就会出现。
写下需要备注的内容后,点击OK。
如果要找回备忘录,重新点击备忘录图标。
备忘录还可以用于视野、人体测量学、人体模型的姿势等。
选择树形图上适当的节点(人体模型、人体测量、视野或身体),相应的备忘录就会显示出来。
ing the Vision Function选择视野图标,或双击树形图上的视野,点击人体模型后就会出现一个新的视野窗口。
在这个窗口中单击右键会出现视野菜单:Export As……输出作为一个图像文件Edit 使用视野对话框编辑视野Close 关闭此窗口视野对话框:1.1.5.1.Type Field就像真人一样,人体模型也可以看到它所在的环境。
它同样可以使用双眼或单只眼睛。
Type选项单允许使用者选择五种视野的表达方式。
当每一种方式选择后,视野窗口会做出相应的变化。
Binocular 双眼视野(左/右单眼视野的交集)Ambinocular 总视野(左/右单眼视野的并集)Right monocular 右眼视野Left monocular 左眼视野Stereo 立体视野(同时显示左/右眼视野)1.1.5.2.Vision TabA.Vision Window:Hide title 隐藏/显示视野窗口上边的台头。
Peripheral contour 此选项显示/隐藏窗口中的视野边界区域。
Central spot视点是视线的末端点,此选项显示/隐藏视点。
Blind spot盲点只表示在单眼的视野中,系统默认盲点为不显示状态。
Rendering...点击此选项,出现系统观察模式菜单,通过菜单可以改变所有窗口的观察模式。
Scale使用比例尺可以对窗口在原始大小至3倍大小之间进行缩放。
B.Display:Line of sight 视线可以被显示/隐藏,视线就像一个末端为控制点的片断,末端的控制点可以依靠IK操作视野。
三种视线:左/右眼视野中的左/右视线,双眼视野/总视野中的中心线。
Blind cone盲锥是用3D图形表示眼睛盲点边界,它只出现在单眼视野中。
系统默认盲锥为不显示状态。
Peripheral cone锥形边界是用3D图形表示视野的边界,系统默认的锥形边界是不显示状态,它依赖于视线是否激活。
Flat display:(平滑)Spherical display:(球面)Boundings display:(跳跃)Bounded cone display:(有界)1.1.5.3.Field of View TabHorizontal monocular:定义单眼模式下水平(XY平面)的视野范围,默认的角度范围是100度。
Horizontal ambinocular:定义总视野模式下水平(XY平面)的视野范围,默认的角度范围是120度。
Vertical top:定义所有视野模式中视点以上的垂直范围,默认的角度范围是35度。
Vertical bottom:定义所有视野模式中视点以下的垂直范围,默认的角度范围是35度。
Central:定义中心视野范围(视网膜中心凹)的范围。
因为这个中心视野是圆形的,所以它的特点是上下左右的范围是相同的一个值。
系统默认的值是6度,最大20度,最小0.5度。
1.1.5.4.Distance TabPonctum proximum:这个参数定义眼睛适应性调节距离范围的最小值,这个值等于距眼睛最近的能够被看清的点与眼睛的距离,默认值为100mm。
Focus distance:焦点距离与激活的视线的长度相等,默认值为300mm。
Ponctum remotum:这个参数定义眼睛适应性调节距离范围的最大值,5m至无穷远,系统定义为无穷远。
ing the Reach Envelope手伸及界面是一个表征人体模型仅仅使用大臂和前臂能够触及到的范围的空间曲面。
整个运动的中心是肩轴点。
可以创建两个伸及界面:左手和右手。
手伸及界面包括在干涉分析中。
点击手伸及界面图标,并且选择人体模型的左手或右手:手伸及界面可以转移到与人体模型绑定的物体上面。
使用Posture Editor(姿态编辑)改变人体模型的姿态,手伸及界面也会发生变化。
如果要删除生成的手伸及界面,右键点击此界面在扩展菜单Left/Right Reach Envelop Object中选择Destroy。
1.1.7.Attaching an Object to a Manikin Segment连接功能可以在人体模型片断与单一或多个物体之间创建一个单向关联。
连接的物体从属于人体模型,一旦被连接,物体随着人体发生位移。
但是要注意的是,这种单向关联意味着只能物体随人体运动。
在进行连接后如果物体发生位移,人体任何部分都不会随物体的位移而变化。
1.1.7.1.Attaching an object to a manikin segmentExample:将人体模型与要连接的物体摆放到合适的位置,点击连接/分离图标,点选要连接的物体,再选择人体模型上面要与物体连接的肢体片断(此例中的右手),此时,连接/分离对话框弹出,点击OK,完成连接。
1.1.7.2.Checking existing attaches on a specific manikin进入人体模型的属性菜单,点击Manikin tab标签,选择Attach tab察看连接管理信息。
下面列出连接的清单。
一个物体同时只可与一个人体模型片断连接,而多个物体可同时与一个人体模型片断连接。
1.1.7.3.Detaching an object from a manikin segment有两种方法断开已经做好的连接:在属性连接管理列表中点选要断开的连接,然后点击列表下面的Detach按键;或使用Attach/Detach命令。
使用Attach/Detach命令:点击命令,然后点选要断开连接的物体,在弹出的对话框中选择Detach Object。
1.2.Manikin Posture Toolbaring the Posture Editor姿态编辑是用来调节人体模型各个部分的正向运动的,人体片断或自由度(DOF)的运动是分步骤进行的,这里可以精确地给出具体的数值。
人体模型由68个铰接点组成,每个点的运动受邻近的点的位置的影响。
点击Posture Editor图标,再选择人体模型,弹出姿态编辑对话框:Segments:列表中为人体模型与人体各个部分一致的名称,点击激活。
Part:这里选择身体各不同的部分,共有3个选项:Hand:编辑手的片断。
Spine:编辑脊柱。
Other:编辑其他所有除了手合脊柱的身体片断。
Side:选择左右,比如左/右臂,左侧为系统默认。
Value使用数值功能可以精确地为人体姿态赋值。