根据六点定位原理分析图
机械制造工艺学习题参考解答(部分)

机械制造工艺学习题参考解答(部分)第一章1-8何谓六点定位原理?何谓“欠定位”?何谓“过定位”?举例说明之。
答:P.16,采用6个按一定规则布置的约束点,可以限制工件的6个自由度,实现完全定位,称为六点定位原理。
(P.17图1-12b));根据工件加工面的位置、尺寸要求必须限制的自由度没有得到全部限制,称为欠定位,欠定位是不允许的。
(P。
21,图1-16)同一个自由度被两个或两个以上约束点约束,称为过定位(或称定位干涉)。
在一定条件下过定位是允许的。
(P。
21,图1-17,P。
22,图1-18)1—9在图示的加工工件中,试分别确定应限制的自由度。
答:a)应限制、、、、5个自由度。
底面1限制了、、,(用支承钉或平板)外圆2限制了、,(用扁V形铁,自动定心)(b) 应限制全部6个自由度槽1(用短圆销)限制,平面2(用支承钉)限制,外圆面3(用厚V形铁)限制、、、(c) 限制所有6个自由度平面1限制(三个支承钉或平板)、、平面2限制(用支承条)、,平面3限制(一个支承钉)。
(d) 应限制全部6个自由度。
底面1限制(用支承板)、、,孔2限制(用短圆销)、,外圆弧3限制(用扁V形铁,可移动的)。
1-10 根据六点定位原理,分析各图示定位方案,并判断各定位元件分别限制了哪些自由度?答:(a)左端卡盘限制、,右端尾顶尖限制、、,共限制5个自由度;(b)左端顶尖限制、、,右端滑动顶尖限制、,共限制5个自由度;(c)心轴+开口弹性套限制、、、4个自由度;(d)左端圆锥销限制、、,右端滑动圆锥销限制、,共限制5个自由度;(e)左侧两个短V形块限制、、、4个自由度,右侧一个短V形块限制、2个自由度,共限制6个自由度,完全定位;(f) 底面两块长支撑板限制、、,侧面下端两个支撑钉限制、,侧面上端菱形销限制,共限制6个自由度,完全定位。
第四章4-3简述机械加工工艺规程的设计原则、步骤和内容.答:P。
12。
优质、高生产率、低成本、利用现有生产条件和减轻工人劳动强度;步骤与内容(10项标题,简写)。
44六点定位原理 - 44六点定位原理

夲讲主要内容
●六点定位原理; ●完全定位和不完全定位、过定位和欠定位;
第6章 机床夹具设计原理
机械制造 技术基础
6.2.1 六点定位原理
6.2 工件的定位
一个自由的物体相对 于三个相互垂直的空间坐 标系,有六种活动的可能 性(三种是移动,三种是转 动),习惯把这种活动的可 能性称为自由度。
物体的六个自由度
过定位现象
由于工件孔中心线与端面的垂直度误差,使得工件端面与 心轴端面不完全接触,当夹紧力朝向心轴端面时,则产生弯曲 力矩,这将造成心轴的变形,影响加工精度。
第6章 机床夹具设计原理
机械制造 技术基础
6.2.1 六点定位原理
避免产生这种不良后果的方法有三种:
第一种方法:消除过定位现象,将心轴端面的结构,改变为球面 垫圈的形式,如图(b),或将心轴的端面改小,即减小与工件 端面接触面积,如图(c),使它只起限制X方向的移动。
第6章 机床夹具设计原理
机械制造 技术基础
6.2.1 六点定位原理
过定位和欠定位现象
如果两种定位元件均能限制工件的同一个方向自由度时,
称为过定位或定位干涉。对于过定位的工件:
1)可能会导致工件放不
定位元件
工件(加 工孔)
进去或使接触点(定位点)
不稳定,增加了同批工件
去掉
在夹具中位置的不统一性;
2)施加夹紧力后,可能
结论:在设计夹具选择定位方式时,在保证工件加工质量 的前提条件下,应尽量选择不完全定位而使夹具结构简单便于 制造。
第6章 机床夹具设计原理
机械制造 技术基础
例6.1
6.2.1 六点定位原理
分析下图所示分别在球和圆柱上铣平面保证尺寸h时所 必须限制的自由度?
夹具实验
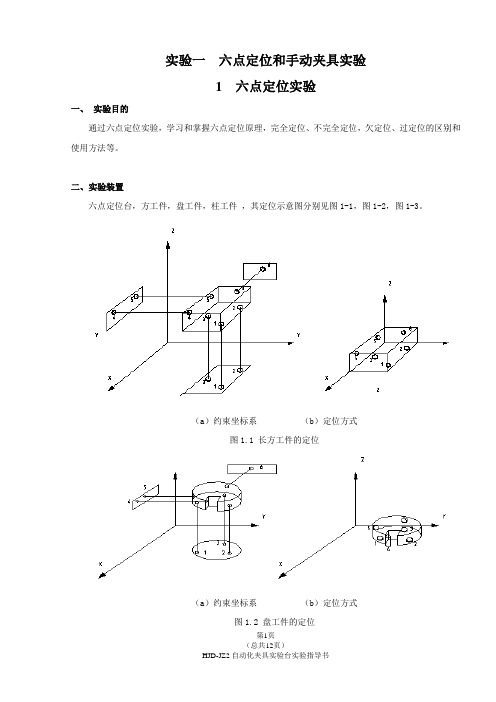
实验一六点定位和手动夹具实验1 六点定位实验一、实验目的通过六点定位实验,学习和掌握六点定位原理,完全定位、不完全定位,欠定位、过定位的区别和使用方法等。
二、实验装置六点定位台,方工件,盘工件,柱工件,其定位示意图分别见图1-1,图1-2,图1-3。
(a)约束坐标系(b)定位方式图1.1 长方工件的定位(a)约束坐标系(b)定位方式图1.2 盘工件的定位(a )约束坐标系 (b )定位方式图1.3 柱工件的定位三、 实验内容及步骤(一)方工件的定位实验内容和步骤1. 认识方工件定位实验的实验装置,支承钉,方工件;2.分别单独实现工件沿X 、Y 、Z 轴的移动及绕X 、Y 、Z 轴的转动;3. 在定位实验装置所确定的坐标平面中实现以下步骤:① 在XY 坐标平面中确定支承钉1、支承钉2、支承钉3的位置——消除,X Z Y , 三个自由度,② 在XZ 坐标平面中确定支承钉4、支承钉5的位置——消除Z Y,两个自由度,③ 在YZ 坐标平面中确定支承钉6的位置——消除X 一个自由度,至此,方工件的沿X 、Y 、Z 轴的移动和绕X 、Y 、Z 轴的转动自由度已被消除,实现了工件的完全定位;4.参照不完全定位,欠定位、过定位的定义并通过恰当的方法(增加或减少支承钉或其它)来实现上述定位方法;5. 清理实验台、装置、工具。
(二)盘工件的定位实验内容和步骤1. 认识盘工件定位实验的实验装置,支承钉,圆销,盘工件;2.分别单独实现工件沿X 、Y 、Z 轴的移动及绕X 、Y 、Z 轴的转动;3. 在由定位实验装置所确定的坐标平面中实现以下:① 在XY 坐标平面中确定支承钉1、支承钉2、支承钉3的位置——消除,X Z Y ,三个自由度, ② 在XZ 坐标平面中确定圆销4、支承钉5的位置——消除Z Y ,两个自由度,③ 在YZ 坐标平面中确定支承钉6的位置——消除X 一个自由度;至此,盘工件的沿X 、Y 、Z 轴的移动和绕X 、Y 、Z 轴的转动自由度已被消除,实现了工件的完全定位;4.参照不完全定位,欠定位、过定位的定义并通过恰当的方法(增加或减少支承钉或其它)来实现上述定位方法;5. 清理实验台、装置、工具。
11.3 工件的定位、安装与基准_配机械制造基础(第2版)

图
示
限 制 自由度
第11章
定位套
定位情况
1个短定位套
2个短定位套
1个长定位套
图
示
限 制 自由度
第11章
• 3.欠定位与过定位 • 根据工件加工要求必须限制的自由度没有得到限制的定位,称为欠 定位。欠定位是不允许的。 • 如果工件的某一自由度同时被两个或两个以上的支承点限制的定位, 称为过定位或重复定位。过定位是否允许,应根据具体情况分析。
定位情况
定位销
短圆柱销
长圆柱销
菱形销
图
示
限制自由度
第11章
圆锥销
定位情况 固定锥销 浮动锥销 固定与浮动组合
图
示
限 制 自由度
第11章
工件以锥孔定位
定位情况 固定顶尖 浮动顶尖 锥度心轴
图
示
限 制 自由度
3.工件以外圆柱面定位 第11章
定位元件
V 形块
定位情况 1个短V形块 2个短V形块 1个长V形块
直接找正法示例 a)磨内孔时工件的找正 b)刨槽时工件的找正
第11章
• • • 2.划线找正法 划线找正法是指工件安装时依据事先在工件上划好的找正线进行找正的方 法。 这种找正方法需要事先在工件上划线,即增加了划线工序,安装精度不高, 且受工人技术熟练程度影响;另外,由于线条具有一定宽度,一般安装精 度仅在0.3~lmm左右,所以划线找正只适用单件小批生产。在成批生产中, 对形状复杂或尺寸较大的工件,也常采用划线法找正。
正确处理过定位
提高工件定位表面与定位元件之间 的位置精度; 改变定位元件(或定位装置)的结 构;
第11章
分析讨论:
下列定位方案 中各定位元件 限制了那些自 由度?
根据六点定位原理分析图

1.根据六点定位原理分析图23(a)~(n)各定位方案中,各个定位元件1(根据六点定位原理分析图2。
3(a),(n)各定位方案中,各个定位元件所消除的自由度.122(根据图2(1l所示各题的加工要求,试确定合理的定位方案,并绘制草图. (1)在球形零件上钻一通过球心O的小孔D(图2(11(a))。
(2)在一长方形零件上钻一不通孔D(图2(11(b))。
(3)在圆柱体零件上铣一键槽b(图2(11(c)).(4)在一连杆零件上钻一通孔D(图2(11(d))。
(5)在一套类零件上钻一小孔O1(图2(11(e))。
(6)在图示零件上钻两个小孔O1及O2(图2(11(f))。
(7)在图示零件上车轴颈d(图2(11(g))33(有一批工件,如图2(16(a)所示,采用钻模夹具钻削工件上Φ5mm(O)1和Φ8mm(O)两孔,除保证图纸尺寸要求外,还要求保证两孔联心线通过2 0mm(D)的轴线,其偏移量公差为0.08mm.现采用如图2(16(b)、(c)、(d),60,0.1三种定位方案,若定位误差不得大于加工允差的1/2。
试问这三种定位方案是否都可行(α=90?)。
44(在图2(23所示的环形零件上铣一缺口(其尺寸要求见零件图2(23(a).采用三种不同的定位方案2(23(b)、(c)、(d)。
试分别计算它们的定位误差,并判断能否满足加工要求.55(图2(29为工件加工平面BD的三种定位方案,孔O,已加工,1,2,13为三个支承钉,分析计算工序尺寸A的定位误差,并提出更好的定位方案。
6006(工件尺寸如图2(30(a)所示。
mm与mm同轴度公差为,40,35,,0。
030.0200.02mm.欲钻孔O,并保证尺寸mm。
试分析计算图示各种方案的定位误30,0.1差(加工时工件轴线处于水平位置,α均为90?)。
707(加工如图2(47(a)所示零件,在工件上欲铣削一缺口,保证尺寸mm。
8,0.08现采用图2(47(b)、(c)所示两种定位方案。
机械制造技术基础期末试题与答案

名词解释避免空走刀;或是车削完后把工件从原材料上切下来。
(4.3)表面质量:通过加工方法的控制,使零件获得不受损伤甚至有所增强的表面状态。
包括表面的几何形状特征和表面的物理力学性能状态。
标注角度与工作角度刀具的标注角度是刀具制造和刃磨的依据,主要有:前角、后角、主偏角、副偏角和刃倾角。
切削加工过程中,由于刀具安装位置的变化和进给运动的影响,使得参考平面坐标系的位置发生变化,从而导致了刀具实际角度与标注角度的不同。
刀具在工作中的实际切削角度称为工作角度。
粗基准——未经过机械加工的定位基准称为粗基准。
常值系统误差当连续加工一批零件时,这类误差的大小和方向或是保持不变刀具耐用度:是指刃磨后的刀具从开始切削至磨损量达到磨钝标准为止所用的切削时间刀具标注后角:后刀面与切削平面之间的夹角刀具标注前角:基面与前刀面的夹角刀具寿命是指一把新刀具从开始投入使用直到报废为止的总切削时间定位:使工件在机床或夹具中占有准确的位置。
定位基准在加工时,用以确定工件在机床上或夹具中正确位置所采用的基准积屑瘤粘附到刀具的前刀面上靠近刀刃处,形成的一块很硬的楔状金属瘤,通常称为积屑瘤,也叫刀瘤,机械加工工艺系统在机械加工中,由机床、刀具、夹具与被加工工件一起构成了一个实现某种加工方法的整体系统,机械加工工艺规程把工艺过程的有关内容,用工艺文件的形式写出来,称为机械加工工艺规程。
机械加工表面质量,是指零件在机械加工后被加工面的微观不平度,也叫粗糙度精基准:用加工过的表面作定位基准,这种定位基准称为精基准。
基准:零件上用以确定其他点、线、面位置所依据的那些点、线、面。
(2.2)夹紧:在工件夹紧后用外力将其固定,使其在加工过程中保持定位位置不变的操作。
加工精度:零件加工后的实际几何参数和理想几何参数符合程度。
加工误差:零件加工后的实际参数和理想几何参数的偏离程度。
金属的可焊性——指被焊金属在采用一定的焊接方法、焊接材料、工艺参数及结构型式的条件下,获得优质焊接接头的难易程度。
汽车专业:汽车制造工艺学考试资料(题库版)

汽车专业:汽车制造工艺学考试资料(题库版)1、填空题()是在夹具完全标准化的基础上,根据积木化原理,针对不同对象和要求,拼装组合而成的专用夹具。
主要用于单件、小批生产或新产品试制。
正确答案:组合夹具2、问答?根据六点(江南博哥)定位原理分析图2-1中各定位方案中各个定元件所消除的自由度。
正确答案:3、问答题数控机床是什么?正确答案:数字控制机床是装备了数控系统,能用数控技术进行加工的机床。
4、填空题工件定位中由于定位基准和工序基准不重合而产生的加工误差,称为()。
正确答案:基准不重合误差5、判断题生产过程是将原材料转变为产品的过程。
正确答案:对6、填空题磨削时,砂轮的速度越高,工件表面的粗糙度值越()。
正确答案:小7、单选在一平板上铣通槽,除沿槽长方向的一个自由度未被限制外,其余自由度均被限制。
此定位方式属于()A:完全定位B:部分定位C:欠定位D:过定位正确答案:B8、问答?图示轴类零件加工的几种装夹情况,试分析各限制了哪些自由度?正确答案:(a)图三爪夹盘限制工件的五个自由度。
后顶尖限制两个自由度。
(b)图三爪夹盘限制工件的四个自由度,中心架限制了两个自由度。
(c)图三爪夹盘限制工件的两个自由度,后顶尖限制了两个自由度。
9、填空题零件的加工精度包含尺寸精度,形状精度和()三方面的内容。
正确答案:位置精度10、问答题表面质量的含义?正确答案:任何机械加工方法所获得的加工表面,都不可能是完全理想的表面,总存在一定的几何形状误差,表面层的物理机械性能也会发生变化。
包括:表面粗糙度及波度—其中较小的是粗糙度,较大的是波度。
它们影响零件的平稳性和耐磨性。
表面层的物理机械性能—机械加工时,由于切削力、切削热的作用,使表面层的物理机械性能发生变化,包括表面层的冷作硬化、表面层的残余应力和表面层金相组织的变化三个方面。
11、判断题每一道工序所切除金属层的厚度称为加工余量。
正确答案:对12、填空题()时一般应遵循保证相互位置要求、保证加工表面加工余量合理分配、粗基准一般不得重复使用原则和便于工件装夹原则。
3.2工件定位原理

(2)定位基准 加工工件时定位所用的基准。用夹具装夹时, 定位基准就是工件上直接与夹具的定位元件相接触的点、 线、面。
3.2 工件定位原理
图3- 6钻套零件车削工序简图
3.2 工件定位原理
2.自由度分类
工件定位时,影响加工要求的自由度必须加以限制,称为 第一种自由度;不影响加工要求的自由度,称为第二种自 由度。第二种自由度有时需要限制,如控制刀具行程或承 受切削力或夹紧力等,有时也可不必限制,视其具体情况 而定。 分析自由度的方法如下: (1)分析零件的加工要求,找出该工序的所有第一种自由度。 明确加工要求,建立空间直角坐标系,依次找出影响加工 要求的自由度并汇总,即为第一种自由度。在已经建立的 坐标系中,假设工件已定位,若工件某加工要求的工序基 准发生偏离理想位置,则该项加工要求的尺寸(或形状) 数值就一定会发生变化。这种影响加工要求的自由度即为 第一种自由度。 (2)找出第二种自由度,从六个自由度中去除第一种自由 度即为第二种自由度 。 (3)根据具体加工要求,判断哪些第二种自由度无需限制。
3.2 工件定位原理
不完全定位例子: 为保证槽底面与A面的平行度和尺寸mm两项加工要求, 必须限制 、 、 三个自由度;为保证槽侧面与B面的平 行度及尺寸30±0.1 mm两项加工要求,必须限制 两 个自由度;至于 ,从加工要求的角度看, 可以不限制
图3-7 加工零件通槽工序图
3.2 工件定位原理
3.2 工件定位原理
3.2.3 工件的定位方式
1 完全定位: 工件的六个支承点全部被限制, 工件在空间占有完全确定的惟一位置,称完 全定位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.根据六点定位原理分析图23(a)~(n)各定位方案中,
各个定位元件
1(根据六点定位原理分析图2.3(a),(n)各定位方案中,各个定位元件所消除的自由度。
1
2
2(根据图2(1l所示各题的加工要求,试确定合理的定位方案,并绘制草图。
(1)在球形零件上钻一通过球心O的小孔D(图2(11(a))。
(2)在一长方形零件上钻一不通孔D(图2(11(b))。
(3)在圆柱体零件上铣一键槽b(图2(11(c))。
(4)在一连杆零件上钻一通孔D(图2(11(d))。
(5)在一套类零件上钻一小孔O1(图2(11(e))。
(6)在图示零件上钻两个小孔O1及O2(图2(11(f))。
(7)在图示零件上车轴颈d(图2(11(g))
3
3(有一批工件,如图2(16(a)所示,采用钻模夹具钻削工件上Φ5mm(O)1和Φ8mm(O)两孔,除保证图纸尺寸要求外,还要求保证两孔联心线通过2 0mm(D)的轴线,其偏移量公差为0.08mm。
现采用如图2(16(b)、(c)、(d),60,0.1
三种定位方案,若定位误差不得大于加工允差的1/2。
试问这三种定位方案是否都可行(α=90?)。
4
4(在图2(23所示的环形零件上铣一缺口(其尺寸要求见零件图2(23(a)。
采用三种不同的定位方案2(23(b)、(c)、(d)。
试分别计算它们的定位误差,并判断能否满足加工要求。
5
5(图2(29为工件加工平面BD的三种定位方案,孔O,已加工,1,2,1
3为三个支承钉,分析计算工序尺寸A的定位误差,并提出更好的定位方案。
6
006(工件尺寸如图2(30(a)所示。
mm与mm同轴度公差为,40,35,,0.030.02
00.02mm。
欲钻孔O,并保证尺寸mm。
试分析计算图示各种方案的定位误
30,0.1
差(加工时工件轴线处于水平位置,α均为90?)。
7
07(加工如图2(47(a)所示零件,在工件上欲铣削一缺口,保证尺寸mm。
8,0.08现采用图2(47(b)、(c)所示两种定位方案。
试计算各定位误差,并分析能否满足加工要求。
若不能满足工序要求,请提出改进方案。
8
(注:可编辑下载,若有不当之处,请指正,谢谢!)。