陆地钻机桅杆式钻杆自动排放系统研究
陆地钻机立柱式钻杆自动传送系统研究

机床 与液 压
MACHI NE O0L & HYDRAUL CS T I
Jn 2 2 a . 0l
Vo. 0 N0 2 14 _
第4 0卷 第 2期
D :1 . 9 9 j i n 1 0 OI 0 3 6 / .s . 0 1—3 8 . 0 2 0 . 0 s 8 12 1. 20 1
K e w o ds Pi u o tc ta fri g s se ; La d rg y r : pe a t mai r nsern y t m n i
近年来 ,世 界 各 国为 揭 开 大 陆地 壳 演 化 奥秘 , 更加 有效地 寻 找资 源 、保 护 环境 、减 轻灾 害 ,纷 纷 进行 深部科学 钻探 。因此 ,需要 研 制适 合 复 杂地 层 取心 钻进 的多工艺 钻进 方法 的深 部 大 陆钻 探 专用 钻 机 。随着探测 深度 的增 加 ,钻井 所 需 的钻 杆 数量 相 应增 加 ,钻井 作业 时 间 、作 业 费 用和 劳动 强 度也 随
Z HU Jl n S ia g , HA n b i Z i Yo g a , HAO Xio ig a yn
( . ol eo c a i l c nead E gnei ,Ji nvri ,C a gh nJ i 3 0 5 hn ; 1 C l g f e Meh n a Si c n n ier g inU iesy h n cu in1 0 2 ,C ia c e n l t l ห้องสมุดไป่ตู้ C a gh nC l g f o a o n eh ooy h nc u in1 0 3 ,C ia . h nc u o eeo ct nadT cn l ,C a gh nJ i 3 0 3 hn ) l V i g l
钻杆自动排放转运和移运系统分析及结构设计
第4 2卷
第 9期
张
敬: 钻 杆 自动排 放转 运 和 移 运 系 统 分 析 及 结 构 设 计
S u m ma r y o f Dr i l l Pi p e Au t o ma t i c S y s t e m An a l y s i s a n d De s i g n ZHA NG J i n g
张 敬
( 渤海 装 备辽 河 重 工有 限 公 司 , 辽 宁 盘锦 l 2 4 0 1 0 )
摘要: 针 对海 上钻 井作业 工作环 境 恶劣 、 钻杆排 放操 作 具有 危 险性 等 问题 , 设 计 了钻 杆排 放 自动 转
运 和 自动移运 系统 。在钻 杆转 运和移 运过程 中都 采 用了液压 系统 , 以 实现 较 高的稳 定性 和精 确性 。
2 O 1 3, 十 第 4 2卷 第 9期 第 4 4页
石 油 矿 场 机 械
OI L F 1 EI D EQUI P M ENT
文章编号 : 1 O 0 1 — 3 4 8 2 ( 2 0 1 3 ) 0 9 0 0 4 4 0 4
钻 杆 自动排 放 转 运 和移 运 系统 分 析 及 结构 设 计
机 的动力传 动模 式 , 它 没有游 动 系统 , 提 升装置通 过 电机驱 动齿轮 与 固定在 井架 上 的齿 条 啮合转动来 实
现 提 升 装 置 上 下 游 动 。 动 力 装 置 通 过 顶 驱 与 钻 柱 直
接 连接 , 便 于控 制钻 柱 方 位 , 既 具有 提 升 能力 , 又 可
~
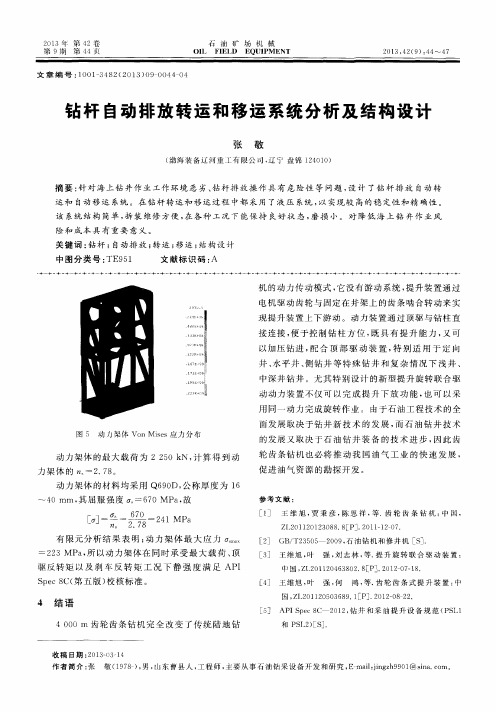
4 O mm, 其屈服 强度 一6 7 0 MP a , 故
~
参考文献 :
L o ' J 一 一
举升式动力猫道的研制

40科技2018年.第8期举升式动力猫道的研制◊长江大学机械工程学院吴文秀马勇超姜姗针对钻井现场钻杆上钻台 与甩钻作业中作业人员劳动强 度大、危险性高、作业效率低 下等问题,本文提出了举升式 动力猫道系统,并对其系统主 要机械结构进行设计,比如四 连杆滑块机构、翻转机构、猶 道小车等。
应用该系统可实现钻具从地面到钻台面的操作过程更安全、更高效举升及甩钻自动化操作,可显著减轻现场工作人员的劳动强度及作业风 险。
1引言近年来,国外先进钻机均要求配有井场钻具自动上、下钻台的装置称为动力猫道。
国外的钻杆自动化传送技术已经发展 的比较成熟;同样国内海上钻井投入资金密集,对其海上平台 设备要求高其设备已经实现了钻杆传送的自动化操作。
而目前 国内陆地钻机在钻杆排放等钻具处理方式上采用最多的是传统 的猫道系统,它主要由钻台面上和猫道尾部的2台5汽动绞车配 合,以人力作业为主要操作模式,作业时需要多名工人配合完 成,作业人员劳动强度大、危险性高、作业效率低下。
本文正 是针对于上述现状,提出一种新型举升式动力猫道,将实现上 钻杆和甩钻杆过程中的自动化以此来减轻劳动力。
由一人进行 远程控制,另一人现场协助,有效降低工人劳动强度和减少起 下钻时间。
2猫道国内外现状研究钢丝绳拉升式钻机动力猫道是目前我国现役的钻机中使用 最多的钻杆上、下钻台设备。
而国外自动化动力猫道相关方面 的研究与应用相比国内要早很多年,国外的很多大型钻机大部 分都装有自动猫道系统,使得管具在上下钻台时,可以实现自 动化。
该系统主要有以下三种类型:①固定式动力猫道。
其主 要特点是猫道和坡道固定不动,在猫道和坡道上开有V形槽作 为钻井管具的运动轨道。
②#升式动力猫道。
其特点是猫道或 者坡道部分不固定,当管柱置于猫道中部的V形槽中,放于V 形槽中的管柱可一同被举升到一定的高度位置,然后再由V形 槽后部的猫道小车把钻杆推送至井口的相应位置。
③大臂旋转移送型。
钻井自动化装备“一键联动”系统
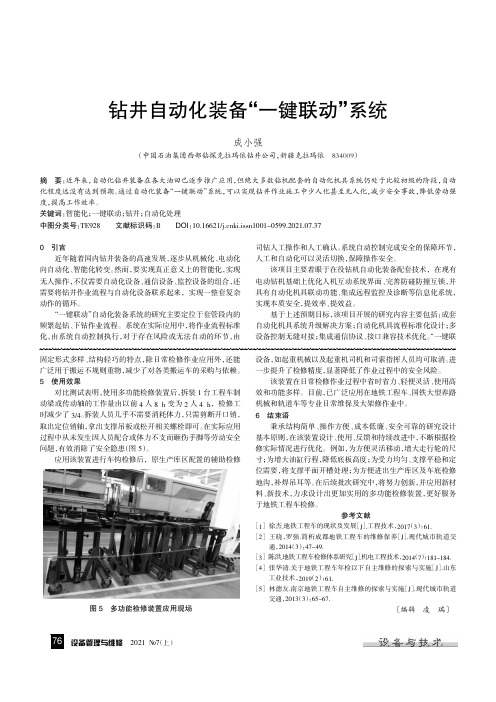
固定形式多样、结构轻巧的特点,除日常检修作业应用外,还能 广泛用于搬运不规则重物,减少了对各类搬运车的采购与依赖。 5 使用效果
对比测试表明,使用多功能检修装置后,拆装 1 台工程车制 动梁或传动轴的工作量由以前 4 人 8 h 变为 2 人 4 h,检修工 时减少了 3/4。拆装人员几乎不需要消耗体力,只需剪断开口销, 取出定位销轴,拿出支撑吊板或松开相关螺栓即可。在实际应用 过程中从未发生因人员配合或体力不支而砸伤手脚等劳动安全 问题,有效消除了安全隐患(图 5)。
司钻人工操作和人工确认。系统自动控制完成安全的保障环节, 人工和自动化可以灵活切换,保障操作安全。
该项目主要着眼于在役钻机自动化装备配套技术,在现有 电动钻机基础上优化人机互动系统界面、完善防碰防撞互锁,并 具有自动化机具联动功能、集成远程监控及诊断等信息化系统, 实现本质安全,提效率、提效益。
基于上述预期目标,该项目开展的研究内容主要包括:成套 自动化机具系统升级解决方案;自动化机具流程标准化设计;多 设备控制无缝对接;集成通信协议、接口兼容技术优化。“一键联
(1) 起钻作业流程:上提钻具至二层台位置寅坐好井口卡 瓦寅卸开钻杆立柱寅将钻杆立柱坐在立根盒寅打开吊卡寅将立 柱拉入二层台。
(2)下钻作业流程:将二层台立柱拉出寅放入吊卡寅上提立 柱寅与井口钻柱连接寅打开井口卡瓦寅下放钻杆。 2 钻井自动化装备动作流程
机械自动化毕业论文选题
毕业论文(设计)题目学院学院专业学生姓名学号年级级指导教师教务处制表二〇一三年三月二十日机械自动化毕业论文选题本团队专业从事论文写作与论文发表服务,擅长案例分析、仿真编程、数据统计、图表绘制以及相关理论分析等。
机械自动化毕业论文选题:基于面向服务构架的机械自动化处理系统的设计与实现BP网络在机械自动化加工参数自动选择中的应用研究机械自动化控制系统中RS485—光-CAN通信模块设计与开发集装箱自动化堆场物流系统仿真与分析感应加热磁热耦合场数值模拟及温度回归分析HEV再生制动系统与ABS协调控制建模与仿真的研究舞台空间姿态控制系统的研究基于激光导航的果园拖拉机自动控制系统研究中国传统家具镶嵌艺术及现代化技术的研究新型修井作业油管移运自动化系统设计与仿真人工清扫街道的环卫工人作业疲劳研究D公司变频器在中国纺织业业务拓展策略研究耳机插头注塑自动化设备的开发新型修井作业起升系统设计及仿真研究智能化工程机械机群状态监测与故障诊断系统研究盘形滚刀破岩过程有限元数值模拟乳化液泵站变频恒压控制系统的研究陆地钻机立柱式钻杆排放系统设计ZJ50D型陆地钻机钻杆自动排放系统的方案设计研究碳纳米管改性聚甲醛的研究弧面分度凸轮机构参数优化设计和仿真远程控制井口作业装置的设计与仿真点焊构件焊点布置的优化设计镍氢动力电池正极极板生产线控制系统研究与开发我国煤矿安全管理体制研究基于Plug—in的苗木嫁接机切削机构的研究自动行走机器人视觉导航系统仿真及行走控制系统设计浪形轴承保持架正反面自动分离技术研究利用测试反拨效用提高独立学院英语教学质量的模式研究电机风机控制器测试系统温室穴盘苗移栽机的设计及试验研究基于多传感器分布式信息融合的AGV定位方法研究铝合金轮毂局部难加工表面砂带抛磨方法研究交流液压系统管道特性及流场分析交际性听力测试在高职高专英语听力测试中的应用丝网凸焊质量实时监测分析系统的研制基于全矢谱的旋转机械轴振与瓦振关系研究基于三菱FX2N的自动弯管机控制系统的设计与实现永磁同步电动机伺服驱动器产品化设计摆动式机械手机构运动与PLC控制的研究基于WCDMA的视频监控系统的设计与实现基于EDEM的垂直螺旋输送机性能参数仿真研究土壤快速采集装置研究棉花打顶机打顶高度自动控制系统基于机器视觉的番茄图像匹配算法研究玻璃钢缠绕机控制系统设计基于现场总线的多梳经编机集成控制系统研究干壳莲子螺杆分级机设计与主要参数试验研究基于图像处理的水稻成熟期密度检测焦炉机械设备控制系统的设计与研究。
钻杆自动排放系统的发展及典型结构

井过 程 中井 口到排 放 架 之 间 钻 杆 排 放 的 自动 化操 作, 避免人 与 钻杆 的直 接 接 触 , 可 加快 起 下 钻 速 并 度 , 降低海 上钻井作 业成本 发挥 了重要作 用 。 对
似 。2 0世纪 4 0年代末 , 一套样 机系统 安装到 Hu m~
ta d e r — e pwa e il i s Thi a e ntod c d t i t r fpi e r c i ys e ,f c o fis t rdrli rg . ng sp p ri r u e he h s o y o p a k ng s t m a t ro t de e o v l pm e ta e e a y c ls t m sa o d n nd s v r lt pia ys e br a . K e r s:p per c i g s t m ;m e h nia i n i e lo e i y wo d i a k n ys e c a z to n w l p n ng;de e o m e ;s r c u e a d t — v lp nt t u t r n he
or Y
在起 下钻过 程 中需 要将钻杆 从井 口移送 到排放
架 或从排放 架移 送 到井 口 , 即钻 杆排 放 操作 。特 点
是具 有危 险性 ; 一个 重 复性 高
14 9 9年 , 研制半 自动化 钻机 时就 采 用 了钻杆 在 排放 系统 。该 系统 可 以通 过 液压 和 气动 阀来进 行 ,
pr v ng t a e y a c o y o iln p r to o i he s f t nd e on m fdrli g o e a in,h s be n wi e y u e n de p t r a d ul a e d l s d i e wa e n —
钻井平台钻杆自动化排放系统方案设计

管机移动及 回转完成钻杆 在井 口与指梁 间运送 , 根 立 设 计独立的 固定装置 , 这种 布局 有效利用 了井架 内空
点是 具有 危险性 ; 一 个 重 复性 高 而 劳动 强 度 大 的 是
过程 , 多人合 作共 同完成 。在海 上钻 井作业 中 , 要 常 遇风浪, 工作 环 境恶 劣 , 全 问题 更 为突 出 。 同时 , 安 海 上钻 井成本 很高 , 加快 钻井速 度 , 短钻 井周期 显 缩 得 尤为 重要 。因此 钻杆 自动化 排放 系统将 会发挥 重 要 作用 。 钻 杆 自动 化排 放 系 统主 要 由排 管 机 、 指梁 2部
钻杆 运送 排放 工作 , 指梁存 放立 根 。
2 2 1 排 管 机 方 案 分 析 ..
排 管机 由排 放臂 、 柱 、 立 扶持 臂 、 吊卡 、 驱 动 、 下
上 驱 动 及 上 、 驱 动 轨 道 组 成 , 液 压 驱 动 。 排 管 机 下 全
为立柱 结构 , 在立 柱 顶 端 和底 端 各 有 1个 驱 动 机 构
何 鸿
( 鸡石 油机 械 有 限责 任 公 司 , 宝 陕西 宝 鸡 7 1 0 ) 20 2
摘 要 : 杆 自动 排 放 系 统 在 提 高钻 井 效 率 、 低 作 业 成 本 方 面 成 效 显 著 。通 过 对 国 内 外 技 术 调 研 , 钻 降
分析排 管 系统典 型结构 , 出一种适 用 于海上钻 井平 台的 自动化 钻 杆排 放 系统 总体 方案 。通 过 方 提
使 其沿 轨道 移 动 , 部 小 车 可 使 立 柱 旋 转 2 7 , 底 9 。排
放 臂安 装在立 柱 导轨 上, 过 安 装 于立 柱 底 部排 放 通
陆地钻机钻杆自动化处理系统方案设计

s i o n a n d s c r e wi n g u p a n d s c r e wi n g o f f a n d t h r e e — j o i n t u n i t t r a n s mi s s i o n . Ke y wo r d s : d r i l l p i p e r a c k i n g b a c k d e v i c e ; a u t o ma t i c s y s t e m; p r o j e c t
3 . C h u a n q i n g Dr i l l i n g En g i n e e r i n g Co . , Lt d ., Ch e n gd u 6 1 0 0 5 1 , C h i n a )
Ab s t r a c t : Au t o ma t i c d r i l l p i p e h a n d l i p g ma d e f a v o r a b l e e f f e c t i n i mp r o v i n g t h e d r i l l i n g e f f i c i e n c y
通 过 自主研 发 的桥 塞与 引进 的桥 塞对 比钻 磨试
验, 可 以得 到 , 自主研 发桥塞 的钻 磨性 能 与引进 桥塞 的钻磨 性 能相 当 。
3 ) 该 桥塞 可 提 高气 田水 平 井 的试 气 效 果 , 具
有 良好 的市场前 景 。1 ) 自主研 发 的 1 1 4 . 3 mm 水 力泵 人式 桥 塞可 满足 常温 及高 温 1 2 0℃下 , 双向 7 0 MP a液 压 密 封 性能 的要 求 。
白丙 建 , 谭 刚 强。 , 栾 苏 。 , 杨 海 刚 。 , 刘春宝l ,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
道 , 时 需要 对猫 道 进行 改 造 , 原 有 的猫 道 凹槽 加深 同 将
1 总体 结构 方 案 设 计
11 技 术 参 数 . 最 大 起 升 重 量 : 0 g; 30 0k
系 统 的 主要 供 应 商 , 产 品最 为 成熟 , 表 了世 界 的先 其 代 进 水 平 。研 制 的 一 系 列 钻 杆 自动 传 送 系 统 已得 到 了 广 泛应 用 , 产 品线 主要 为 海钻 平 台使 用 的排 杆 系统 , 其 陆 地 钻 机 所 用 排 杆 系 统 较 为 少 见 。 国 内 对 钻 杆 自动 传 送 系 统 的 研 究 和 应 用 较 少 ,只 有 个 别 单 位 做 过 一 些 研 究 和 设 计 的 尝 试 , 均 未 投 入 批 量 生 产 和 使 用 。目 前 国 内 但 尚 无 一 家 制 造 企 业 正 式 推 出 面 向 市 场 的 钻 杆 自动 排 放
12 . 总 体 结 构 方 案
如 图 1 桅 杆 式 钻 杆 自 动 排 放 系 统 具 有 桅 杆 式 柱 . 形立 式 结构 , 杆 是该 系统 的核心 承重 部 件 , 时 也是 桅 同 中 心 回 转 轴 。 10 回转 。 统 顶 部 和 底 部 各 有 一 个 可 可 8。 系 滑 动小 车 系统 , 部小 车 为整 个 系统提 供 牵 引动 力 , 底 可 沿 钻 台 上 的 轨 道 凹 槽 水 平 运 动 , 部 小 车 为 从 动 , 随 顶 伴 桅杆 移 动 , 要 起 平衡 作用 , 过 顶部 滑轨 使桅 杆 保持 主 通 竖 直 。 顶 部 小 车 上 同 时 安 装 有 两 部 绞 车 。 部 的 绞 车 在 顶 系 统 主 要 控 制 整 个 上 悬 臂 的 高 度 , 以 适 应 不 同 长 度 钻 具 的 高 度 需 求 。 杆 上 桅 安 装 两 套 悬 臂 式 伸 缩 机 械 手 , 中 上 悬 臂 可 其
车 作 用 下 沿 桅 杆 上 下
竖 直 滑 动 。 悬 臂 装 有 上
可分 离 的机 械 手夹 具 . 通 过 绞 车 线 缆 与 上 悬 臂 连 接 . 到 提 升 钻 具 起 的 作 用 。 悬 臂 机 械 手 下 作 为 辅 助 的 扶 正 机 械 手 , 到 在 作业 中保证 起
中E 4
文 献 标 识 码 : A
文 章 编 号 :0 0 4 9 ( 1 )2 0 4 - 2 10 — 9 82 20 - 0 3 0 0
陆 地钻 机桅 杆 式钻 杆 自动排 放 系统 主要 是 在钻 井 过 程 中 实 现 钻 杆 在 井 口 与 钻 杆 排 放 架 间 的 往 返 输 送 功 能 。 及 起 钻 和 完 井 时 自动 运 输 钻 杆 上 下 钻 台 的 功 能 。 以 还 能与 铁钻 工 、 力辅 助 鼠洞等 系统 配 合使 用 , 成离 动 完 线 单 根 接 立 根 操 作 .不 再 需 要 使 用 传 统 的 独 立 起 升 绞 车 ,可 以 提 高 钻 井 效 率 。 该 系 统 本 身 可 以 与 现 有 的 星 型 、 平 型 及 X— 型 钻 杆 排 放 架 配 合 , 现 自动 运 行 。 水 Y 实 钻 杆 自动 排 放 系 统 在 国 外 有 较 长 的 研 究 和 应 用 历
由上 下部 支撑 行 走 机 构 、 转桅 杆 、 下 悬臂 机 械 手 等 组 成 , 装 在 钻 台轨 道 上, 实现 对 钻 具 的 夹持 、 升 、 转 、 移 和 回 上 安 可 提 回 平 排 放 作 业 。具 有 结构 简单 、 局合 理 , 于操 控 等 特 点, 安 装 在 各 种 陆 地 石 油 钻机 上 。 布 便 可 关 键词 : 杆 排 放 系 统 钻 陆地 钻 机 结 构 设 计
陆 地 钻 机 桅 杆 式 钻 杆 自动 排 放 系 统 研 究
口 张 洪 生 口 杨 帆 口 姚璐 璐 口 邵 兵
兰 州理 工 大 学 机 电工 程 学 院 兰 州 705 30 0
摘 要 : 减 少起 下钻 作 业 时 间, 高 钻 井 效 率 , 出 了一 种 桅 杆 式 陆 地 钻 机 钻 杆 自动 排 放 系统 的 设 计 方 案 。该 装 置 为 提 提
系统 。 然最 近两 年 陆续 有部 分产 品 投产 。 其 模式 都 虽 但
是 国 外 较 早 的 半 自动 分 段 式 , 且 结 构 庞 大 , 件 运 行 而 组 程 序 复 杂 , 造 和 运 行 成 本 比 较 高 , 能 完 全 自动 化 作 制 不
业 。
钻 具 相 对 平 衡 的 作 用 , 使 钻 具 对 正 井 口 鼠洞 或 钻 杆 能
拓 宽 , 钻 具 在 起 吊过 程 中 , 于 自身 重 力 作 用 钻 具 尾 使 由 端 可 以受 到 猫 道 凹槽 的 约 束 , 少 晃 动 和 摆 动 的 幅 度 , 减 以便顺 利 与下 臂 的扶正 机 械手实 现对 接 。
13 工 作 原 理 -
最 大 提 升 高 度 ( 杆 高 度 ) 3 . ; 桅 : 75 m 机 械 臂 水 平 伸 展 距 离 : ; 业 半 径 : ~ ; 2m 作 2 4m
在 顶 部 小 车 安 装 的 绞
史 , 全 球 的 石 油 钻 具 制 造 商 中 。 国 Nain lOi wel 在 美 t a l l o —
Va e ( r o N0V) 司 、 e a r e 公 Ak r Kv e n r公 司 、 l e d I n v — Oi l n o a i f t r i td( L) 司 和 T S 0 公 司 是 钻 杆 自 动 排 放 o s L mi e OI 公 E C