蓝牙模块的使用_蓝牙模块小车的制作步骤
循迹避障蓝牙小车设计思路与方案
循迹避障蓝牙小车设计思路与方案近年来,随着科技的飞速发展,智能机器人逐渐走进我们的生活。
其中,循迹避障蓝牙小车成为了人们关注的焦点之一。
它不仅可以通过循迹技术实现沿指定路径行驶,还能够通过避障技术避免与环境中的障碍物发生碰撞。
本文将介绍循迹避障蓝牙小车的设计思路与方案。
一、硬件设计1. 主控模块:选择一块性能稳定、功能丰富的主控板,如Arduino Uno。
它具有较强的扩展性,能够满足蓝牙通信和传感器接口的需求。
2. 电机驱动模块:选择合适的电机驱动模块,如L298N。
它能够提供足够的电流和电压来驱动小车的电机。
3. 电机:选择高性能的直流电机,根据小车的重量和所需速度进行合理选择。
4. 轮胎:选择具有较好摩擦力和抓地力的轮胎,以确保小车能够稳定行驶。
5. 循迹模块:选择适用的循迹模块,如红外传感器或巡线传感器。
它可以通过检测地面上的黑线来实现循迹功能。
6. 避障模块:选择合适的避障模块,如超声波传感器或红外避障传感器。
它可以通过检测前方的障碍物来实现避障功能。
7. 电源模块:选择合适的电源模块,如锂电池或干电池。
它能够为整个系统提供稳定的电源供应。
二、软件设计1. 循迹算法:利用循迹模块检测地面上的黑线,通过编程实现小车沿着指定的路径行驶。
可以采用PID控制算法来调整小车的转向角度,保持在黑线上行驶。
2. 避障算法:利用避障模块检测前方的障碍物,通过编程实现小车避开障碍物。
可以采用距离测量和路径规划算法来确定避障的方向和距离。
3. 蓝牙通信:通过蓝牙模块与手机或电脑进行通信,实现对小车的控制和监控。
可以编写相应的手机应用或电脑软件来实现远程控制和实时监测。
三、系统集成1. 连接硬件:将主控模块、电机驱动模块、电机、循迹模块、避障模块和电源模块按照设计连接起来,确保各模块正常工作。
2. 编程调试:编写相应的程序代码,并进行调试。
通过串口或无线通信方式将程序烧录到主控模块中,保证系统的稳定性和可靠性。
蓝牙小车使用说明

蓝牙小车使用说明
产品名称:蓝牙小车
使用范围:空旷地方10米内
使用时间:电池在充满电的情况下可以持续使用大约20分钟
一、使用前准备
1、打开手机蓝牙以及小车的电源键;
2、将手机与小车的蓝牙进行配对,小车的蓝牙名车为HC-06,配对码(PIN码)为1234;
3、下载应用“蓝牙重力小车”,并安装在安卓手机上;
4、运行蓝牙重力小车应用,点击建立连接。
蓝牙模块上的LED灯停止闪烁并且长亮代表连接成功。
二、使用操作
建立连接后,可以点击上、下、左、右以及停止(中间)按键操作小车,按下后手不离开屏幕,小车则会做相应方向的运动,离开屏幕小车停止运动。
如果需要使用重力感应控制小车,请先点击“开启重力”按键,关闭重力感应控制则点击“关闭重力”按键。
手机屏幕朝上小车向前运动,朝下向后运动,屏幕垂直地面往左侧转至水平向左转,右侧转值水平向右转。
三、注意事项
1、使用前请保证电池电量充足,如果开启电源后蓝牙模块不闪烁或者建立连接控制小车不运动,请重启小车、应用或者为电池充电;
2、使用结束后请小车关闭电源手机蓝牙以节能;
3、使用重力感应控制小车的功能时,如果在小车正在运动时关闭此功能,小车会继续运动,此时可以点击“停止”按键使小车停止。
教育拼装积木机器人教程5小车走起来

教育拼装积木机器人教程5小车走起来引言:拼装积木机器人不仅能够激发孩子们的创造力和动手能力,还可以培养他们的逻辑思维和解决问题的能力。
本文将为你详细介绍如何使用教育拼装积木来制作一个小车,并教会它行驶。
一、材料准备:1.教育拼装积木套件2.电机模块3.蓝牙模块4.电池盒和6节5号电池5.手机或平板电脑6.一台个人电脑二、组装小车底盘:1.打开教育拼装积木套件,选择适当的积木组装一个长方形底盘,做好固定。
2.在底盘上选择合适的位置,将电机模块连接到底盘上,确保电机轴与轮子对齐。
3.将蓝牙模块与电机模块连接,确保连接稳固。
三、连接电路:1.将电池盒连接到电机模块上,注意正负极的对应关系。
2.连接蓝牙模块到电机模块,以便与手机或平板电脑进行通信。
四、安装控制程序:1.打开个人电脑上的积木机器人编程软件,创建一个新项目。
五、编写控制程序:2.在程序中选择“小车行驶”功能,设置小车前进、后退、左转和右转的指令,并确定速度。
3.运行程序,调试确保指令和速度设定正确。
六、进行实验:1.将电池放入电池盒中,并将电源接通。
2.打开控制程序,与蓝牙模块进行连接。
3.查看程序界面,通过按钮或手势控制小车的行驶。
前进、后退、左转、右转和停止。
七、进一步改进:1.在小车上增加传感器,如避障传感器或寻线传感器,以提高小车的智能化程度。
2.设计一个遥控器,使用无线遥控来控制小车的行驶。
3.添加其他功能,如语音控制或跟随功能,来增加小车的乐趣和实用性。
结论:通过拼装教育积木机器人,我们可以制作一个可以前进、后退、左转和右转的小车。
通过编写控制程序,我们可以通过手机或平板电脑来控制小车的行驶。
这个项目不仅可以帮助孩子们学习电路知识和编程思维,还可以培养他们的创造力和解决问题的能力。
希望通过这个教程,你能够成功制作一个可爱又聪明的小车!。
蓝牙小车实习报告
一、实习背景随着科技的发展,单片机技术逐渐成熟,各种智能设备层出不穷。
蓝牙作为一种无线通信技术,因其传输速度快、距离远、功耗低等优点,被广泛应用于各类智能设备中。
本实习报告以蓝牙技术为核心,设计并实现了一款蓝牙控制的多功能智能小车。
二、实习目的1. 熟悉单片机原理及编程方法;2. 掌握蓝牙通信技术;3. 学习传感器应用及小车控制算法;4. 提高动手实践能力,培养创新思维。
三、实习内容1. 蓝牙小车系统设计(1)硬件设计蓝牙小车硬件主要包括以下部分:1)单片机:选用STC89C52单片机作为核心控制器;2)蓝牙模块:选用HC-05蓝牙模块,实现手机与单片机的无线通信;3)驱动电路:采用L298N电机驱动器,驱动两个直流电机;4)传感器模块:包括红外传感器、超声波传感器、光电传感器等,用于检测小车周围环境;5)其他元件:如电源模块、按键、蜂鸣器等。
(2)软件设计蓝牙小车软件设计主要包括以下部分:1)主程序:初始化蓝牙模块、传感器模块、电机驱动器,实现小车的基本功能;2)蓝牙通信模块:实现手机与单片机的数据传输,控制小车前进、后退、左转、右转等功能;3)传感器数据处理模块:对传感器采集到的数据进行处理,实现避障、循迹等功能;4)电机控制模块:根据蓝牙接收到的指令和传感器数据处理结果,控制电机转速,实现小车运动。
2. 蓝牙小车功能实现(1)蓝牙控制通过蓝牙模块,用户可以使用手机发送指令,实现小车的前进、后退、左转、右转等功能。
具体操作如下:1)连接蓝牙:打开手机蓝牙功能,搜索并连接HC-05蓝牙模块;2)发送指令:在手机上输入相应的指令(如“前进”、“后退”等),蓝牙模块将指令发送给单片机;3)执行指令:单片机接收到指令后,控制电机驱动器,使小车按照指令进行运动。
(2)避障功能当小车遇到障碍物时,超声波传感器会检测到障碍物距离,并将距离信息发送给单片机。
单片机根据距离信息,控制小车进行避障。
具体实现如下:1)检测障碍物距离:超声波传感器发射超声波,当超声波遇到障碍物反射回来时,计算反射时间,得到障碍物距离;2)判断障碍物距离:根据预设的距离阈值,判断是否需要避障;3)控制小车运动:如果需要避障,单片机控制小车进行相应的转向,绕过障碍物。
单片机蓝牙小车实习报告
一、实习背景随着科技的发展,单片机技术得到了广泛应用。
为了提高自己的动手能力,拓宽知识面,我们选择了单片机蓝牙小车作为实习项目。
本项目旨在利用单片机技术,通过蓝牙通信实现小车的无线遥控,使其具备基本移动和避障功能。
二、实习目的1. 掌握单片机的基本原理和编程方法。
2. 熟悉蓝牙通信技术及其应用。
3. 培养团队合作精神和动手能力。
4. 提高解决实际问题的能力。
三、实习内容1. 硬件设计(1)主控芯片:选用STC89C52单片机作为小车的主控芯片,具有丰富的I/O口,便于扩展。
(2)蓝牙模块:选用HC-05蓝牙模块,实现手机与单片机的无线通信。
(3)电机驱动:采用L293D电机驱动芯片,为直流电机提供足够的驱动能力。
(4)传感器:选用红外传感器作为避障传感器,检测前方障碍物。
(5)电源:采用两节3.7V锂电池为小车提供电源。
2. 软件设计(1)主控程序:编写单片机主程序,实现蓝牙通信、电机控制、避障等功能。
(2)手机端程序:编写手机端蓝牙控制程序,实现小车的无线遥控。
3. 系统调试(1)硬件调试:检查电路连接,确保各模块正常工作。
(2)软件调试:通过串口调试助手,观察程序运行状态,发现问题并修改。
四、实习过程1. 硬件制作(1)根据电路图,焊接各元器件,包括单片机、蓝牙模块、电机驱动芯片、红外传感器等。
(2)组装小车底盘,将各模块安装到位。
2. 软件编程(1)编写单片机主程序,实现蓝牙通信、电机控制、避障等功能。
(2)编写手机端蓝牙控制程序,实现小车的无线遥控。
3. 系统调试(1)硬件调试:检查电路连接,确保各模块正常工作。
(2)软件调试:通过串口调试助手,观察程序运行状态,发现问题并修改。
五、实习成果1. 成功制作了一台单片机蓝牙小车,具备基本移动和避障功能。
2. 掌握了单片机编程、蓝牙通信、电机控制等技术。
3. 提高了动手能力和团队合作精神。
4. 为今后的学习和工作打下了基础。
六、实习总结通过本次单片机蓝牙小车实习,我们深刻体会到理论与实践相结合的重要性。
stm32小车蓝牙模块原理

stm32小车蓝牙模块原理
本文将简要介绍STM32小车蓝牙模块的原理。
STM32小车蓝牙模块是利用STM32单片机控制小车运动方向和速度的一种外围装置,通过蓝牙模块与手机进行通讯控制小车运动。
其原理主要包括以下几个方面:
1. STM32单片机控制小车运动
STM32单片机作为小车的控制核心,通过GPIO口输出控制小车
电机的转动方向和速度,从而实现小车的运动。
通过编写相应的程序,可以实现小车的前进、后退、左转、右转等基本运动。
2. 蓝牙模块实现与手机的通讯
蓝牙模块作为小车与手机之间的通讯接口,主要负责接收手机发来的指令,并将指令传输给STM32单片机进行处理。
同时,蓝牙模块也可以将小车的状态信息反馈给手机,以便用户了解小车的运行状态。
3. 手机APP控制小车运动
用户通过手机APP向小车发送指令,控制小车的运动。
指令通过蓝牙模块传输给STM32单片机进行处理,从而实现小车的运动控制。
用户可以通过手机APP调整小车的运动速度和方向,以便适应不同的运动环境。
综上所述,STM32小车蓝牙模块实现了通过手机控制小车运动的功能,为用户提供了一种方便、灵活的控制方式。
未来,随着物联网技术的发展,STM32小车蓝牙模块有望成为物联网领域的重要应用之一。
蓝牙模块使用操作步骤
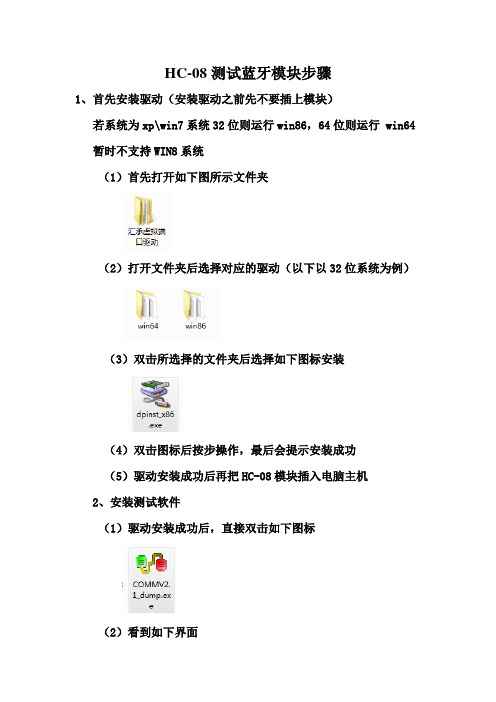
HC-08测试蓝牙模块步骤
1、首先安装驱动(安装驱动之前先不要插上模块)
若系统为xp\win7系统32位则运行win86,64位则运行 win64 暂时不支持WIN8系统
(1)首先打开如下图所示文件夹
(2)打开文件夹后选择对应的驱动(以下以32位系统为例)
(3)双击所选择的文件夹后选择如下图标安装
(4)双击图标后按步操作,最后会提示安装成功
(5)驱动安装成功后再把HC-08模块插入电脑主机
2、安装测试软件
(1)驱动安装成功后,直接双击如下图标
(2)看到如下界面
(3)只需要修改一下端口号(端口号可在电脑设备管理器中查看),然后点击打开串口
(4)在发送区输入大写字母AT+ROLE=M,
若接收区显示 OK,则修改主机成功
(5)在发送区输入大写字母AT 若接收区显示OK ,则HC-08主机正常
(6)将HC-08从机(即要测试的模块)接收端和发射端短接,上电后在发送区随便输入什么数据,接收区显示输入的数据则从机正常
(7)测试完上一个从机后,按一下主机侧面的按键,清除主机的记忆,否则将一直保留上一个从机的MAC地址。
智能小车蓝牙控制技术设计方案

智能小车蓝牙控制技术设计方案一、引言智能小车是一种可以通过蓝牙进行远程控制的无人驾驶车辆。
在本设计方案中,我们将介绍智能小车蓝牙控制技术的设计和实现方法。
二、设计目标本设计方案的目标是实现通过蓝牙控制智能小车的前进、后退、转向和停止等功能。
同时,还要保证通信的可靠性和稳定性。
三、硬件设计1.MCU选择我们选择一款性能强大且低功耗的MCU芯片,如STM32系列。
该芯片具有高度集成、高性能和低功耗的特点,适合用于嵌入式系统的设计。
2.传感器智能小车需要依靠传感器来获取周围环境信息,以实现自主导航和避障功能。
常用的传感器包括红外线传感器、超声波传感器等。
这些传感器将与MCU进行连接,提供实时数据。
3.电机驱动为实现小车的运动控制,我们需要选择合适的电机驱动器件。
DC电机驱动器件常用的有L298N、L293D等,可以方便地控制电机的运动方向和速度。
4.蓝牙模块我们需要选择一款蓝牙模块,实现小车与远程设备的通信。
常用的蓝牙模块包括HC-05、HC-06等,它们可以通过串口与MCU进行通信。
四、软件设计1.系统架构我们将使用C语言编写嵌入式系统的固件代码,实现小车的运动控制、通信和传感器数据的处理等功能。
固件代码将运行在MCU上,通过与蓝牙模块和传感器的交互,实现智能小车的控制和数据处理。
2.蓝牙通信协议为了实现蓝牙控制功能,我们需要定义一套通信协议。
例如,可以通过串口发送指令来控制小车的运动,如前进、后退、左转、右转和停止等指令。
同时,小车也需要可以向远程设备发送传感器数据,如距离、温度等信息。
3.控制算法小车的运动控制算法可以根据具体的需求进行设计。
例如,可以根据传感器数据判断小车是否遇到障碍物,并进行相应的避障动作。
同时,还可以根据远程设备传输的指令实现运动控制。
五、测试和优化在完成硬件和软件设计后,我们需要对设计的智能小车进行测试并进行优化。
首先,我们可以通过调试工具和调试指令来验证代码的正确性。
然后,我们可以通过模拟实际场景来测试小车的功能和性能,例如在不同的地形和环境下测试小车的运动控制和避障功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
蓝牙模块的使用_蓝牙模块小车的制作步骤
一、引言
蓝牙模块是一种无线通信模块,可以在短距离内构建起稳定的蓝牙通信连接。
在电子制作中,蓝牙模块常常被用于与手机或其他蓝牙设备进行通信,实现远程控制等功能。
本文将介绍如何使用蓝牙模块制作一辆蓝牙模块小车。
二、材料准备
1. Arduino开发板
2.直流电机驱动模块
3.直流电机
4.4个轮子
5.蓝牙模块
6.电池盒和电池
7.连接线及焊接工具
三、电路连接
1. 将Arduino开发板与蓝牙模块通过跳线连接。
将蓝牙模块的VCC 引脚连接到Arduino的5V引脚,GND引脚连接到Arduino的GND引脚,TX引脚连接到Arduino的RX引脚,RX引脚连接到Arduino的TX引脚。
2. 将直流电机驱动模块与Arduino开发板连接。
将电机驱动模块的IN1、IN2、IN3和IN4引脚分别连接到Arduino的数字引脚2、3、4和5上。
3.将直流电机与电机驱动模块连接。
将电机驱动模块的OUT1和OUT2引脚连接到一侧电机的正负极,OUT3和OUT4引脚连接到另一侧电机的正负极。
4. 将电池盒与Arduino开发板连接。
将电池盒的正负极分别连接到Arduino的5V和GND引脚上,为Arduino供电。
四、编写程序
1. 打开Arduino IDE开发环境,新建一个空白程序。
2.引入必要的库文件。
在程序的开头部分添加以下代码:
```
#include <AFMotor.h>
#include <SoftwareSerial.h>
```
3.定义蓝牙串口对象和电机对象。
在程序的全局变量部分添加以下代码:
```
SoftwareSerial mySerial(2, 3); // 蓝牙串口对象
AF_DCMotor motor1(1); // 电机对象1,连接到电机驱动模块的OUT1和OUT2引脚
AF_DCMotor motor2(2); // 电机对象2,连接到电机驱动模块的
OUT3和OUT4引脚
```
4. 初始化程序。
在程序的setup(函数中添加以下代码:
```
void setu
mySerial.begin(9600); // 初始化蓝牙串口波特率为9600
motor1.setSpeed(255); // 设置电机1的速度为最大(0~255)
motor2.setSpeed(255); // 设置电机2的速度为最大(0~255)
```
5. 实现蓝牙控制小车的功能。
在程序的loop(函数中添加以下代码:
```
void loo
if (mySerial.available( > 0) { // 如果蓝牙串口接收到数据
char cmd = mySerial.read(; // 读取数据
stop(; // 停止小车运动,避免碰撞
switch(cmd)
case 'F':
forward(; // 小车前进
break;
case 'B':
backward(; // 小车后退
break;
case 'L':
left(; // 小车左转
break;
case 'R':
right(; // 小车右转
break;
}
}
//小车前进函数
void forwar
motor1.run(FORWARD); // 电机1正转motor2.run(FORWARD); // 电机2正转//小车后退函数
void backwar
motor1.run(BACKWARD); // 电机1反转
motor2.run(BACKWARD); // 电机2反转
//小车左转函数
void lef
motor1.run(BACKWARD); // 电机1反转
motor2.run(FORWARD); // 电机2正转
//小车右转函数
void righ
motor1.run(FORWARD); // 电机1正转
motor2.run(BACKWARD); // 电机2反转
//停止小车运动函数
void sto
motor1.run(RELEASE); // 电机1停止
motor2.run(RELEASE); // 电机2停止
```
五、上传程序
将Arduino开发板通过USB连接到电脑上,选择适合的开发板类型和串口号,点击上传按钮将程序上传到开发板中。
六、测试运行
将蓝牙模块与手机或其他蓝牙设备连接,打开蓝牙串口调试助手或类似的手机APP,发送对应的指令来控制小车前进、后退、左转、右转等动作,观察小车是否按照指令正确运动。
七、总结。