第一章陀螺罗经原理
合集下载
航海仪器-第1节 陀螺罗经1

T=0 T=6h
T=12h
地球自转角速度的分解
Z。 We S E 以 北 纬 点 为 例 (We:地球自转角速度 We
•We分解为: W1=Wecosφ(水平分量) W2=Wesinφ (垂直分量)
φ :地理纬度)
W2 φ W O W1
φ
N
PN
•W1:在北纬使水平面 SENW的东半平面不断 下沉,西半平面不断上 升。(南纬相同) •W2:在北纬使子午面S Z。N的N点不断向W移 动。(南纬反之)
2、陀螺仪的特性
1)陀螺仪的定轴性(也称稳定性) 不受外力矩作用时,陀螺仪的主轴保持 其空间的初始方向不变。
定轴性实验录像
2、陀螺仪的特性
1.陀螺仪的定轴性(也称稳定性)
实验一:自由陀螺仪转子不转,转动陀螺仪基 座,主轴随基座一起转动。 实验二:自由陀螺仪转子高速旋转,转动陀螺 仪基座,主轴不随基座一起转动。 自由陀螺仪表现为定轴性的条件是:陀螺转子 高速旋转;陀螺仪不受外力矩作用。
1.人坐车前进时感觉到路两旁的树在不 断地向后运动,为什么? 2.地球的运动规律?地球上的人看到 太阳东升西落,是太阳的运动吗? 3.将陀螺仪的主轴初始指向地球上 某一方位,人会看到它的指向始终 不变吗?
自由陀螺仪在地球上的视运动
北半球,若将自由陀螺仪 放在A点,使其主轴位于 子午面内并指恒星S,由 于地球自西向东转,经 过一段时间后,它转到B 点,因定轴性,陀螺仪 主轴仍将指恒星S方向但 相对子午面来说,主轴 指北端已向东偏过了α 角。 北纬看自由陀螺仪视运动
三、发展历史
两千多年前,我国劳动人民在生活和生产实践中发现了陀螺 的基本特性。 1852年,法国科学家福科第一个利用陀螺特性并与地球自转 相联系,它利用三自由度陀螺仪的定轴性来观测地球自转; 并提出了创见性的理论。 1878年,美国科学家霍布金发明了用电机推动的陀螺罗经。 1908年,德国人安许茨创造了世界上第一台实用陀螺罗经。 成为一个罗经系列。陀螺罗经也由此开始出现。 1909年,美国人斯伯利也创造了单转子弹性支承的陀螺罗经, 并且也逐步发展成为一个罗经系列。 二十世纪五十年代,一个新的罗经系列逐渐形成,即美英两 国合作生产的阿玛勃朗型——电磁控制式陀螺罗经。
陀螺罗经指北原理

三、进动角速度与进动公式
进动角速度 :
MY ωP = H
My H ;
进动公式:
ω pz =
ω py
Mz =− H
四、赖柴尔定理(P6): 外力矩 = 动量矩矢端的线速度 即:M=up 结论:表示为当外力矩作用的方向与 动量矩的方向垂直时,在动量矩矢端 将产生一个线速度,该线速度的大小 与外力矩相等,方向与外力矩的方向 相同
阻尼的目的 将等幅运动变为减幅运动,最后衰减 至子午面上的某个稳定位置,以实现 稳定指北。 阻尼的方法 压缩长轴法——水平轴阻尼法 压缩短轴法——垂直轴阻尼法
水平轴阻尼法
1.定义:由阻尼设备产生水平轴的阻尼力矩以实 现阻尼的方法。 2.原理: •要求阻尼力矩引起的进动线速度(u3)总是指向 子午面 •在第1和第3象限内,主轴指北端抵达子午面时高 度角θ减幅<θ等幅 ;在第2和第4象限内,主轴指北端 到达水平面时α减幅<α等幅。渐次衰减至稳定位置r
二、陀螺仪的两个特性
1.定轴性:不受任何外力矩作用 的自由陀螺仪的主轴将保持其 初始空间方位不变。(即惯性 空间) 2.进动性:在外力矩M的作用 下,3自由度陀螺仪主轴动量矩 H矢端将以捷径趋向外力矩M矢 端作进动。(H→M) ¾角速度ω ¾动量矩H=Jω ¾外力矩M=r*F ¾右手定则
FHale Waihona Puke F1图1-14图1-15
主轴在方位上的变化
主轴在高度上的变化
地球自转角速度的水平分量和垂直分量 在北纬任意纬度处,可以将地球自转角速 度分解到ON轴和OZ0轴上,得到两个 分量ω1和ω2,在ON轴上的ω1称为水 平分量,在OZ0轴上的ω2称为垂直分 量。 ⎧ω1 = ω e cos ϕ 显然,在北纬 ⎨ω = ω sin ϕ
安许茨系列陀螺罗经资料课件

THANKS
罗经分类
按照用途可分为航向罗经、方位罗经等。
指向原理
罗经中的陀螺仪始终保持稳定的指向,通过测量陀螺仪的指向变化可以确定载体的方向或角度。 当载体发生方向改变时,罗经中的陀螺仪会产生一个与方向改变成正比的信号,通过处理这个信
号可以确定载体的新方向。
陀螺罗经优势
高精度
陀螺罗经利用陀螺仪的稳定性来 测量方向或角度,具有高精度和
掌握使用陀螺罗经时的注意事项和操作规范 ,确保其准确性和可靠性。
新型陀螺罗经技术展望
光纤陀螺罗经技术
介绍光纤陀螺罗经的原理、优点 和应用前景,展望其在航海领域 的发展趋势。
微机械陀螺罗经技
术
探讨微机械陀螺罗经的工作原理 、特点和发展趋势,预测其在未 来航海领域的应用前景。
智能化陀螺罗经系
统
研究智能化陀螺罗经系统的原理 、功能和优势,展望其在提高航 海安全和效率方面的作用。
化学清洁剂。
润滑处理
定期对陀螺罗经活动部 件进行润滑处理,确保 其转动灵活、无卡滞现
象。
常见故障排除方法
1 2 3
无法启动
检查电源连接是否可靠、开关是否处于正确位置 ,如仍无法启动请联系专业技术人员。
工作异常
密切关注陀螺罗经工作状态,如出现异常现象( 如指针抖动、偏差过大等),立即停机检查,必 要时请联系专业技术人员。
将主机安装在底座上,并连接好 相关电缆和接口。
安装传感器
根据实际需要,安装相应的传感 器,如航向传感器、姿态传感器
等。
注意事项
在安装过程中,要避免对设备造 成损坏或影响其性能,如避免过 度拧紧螺丝、避免拉扯电缆等。
调试过程与技巧分享
设备初始化
陀螺罗经指北原理综述
U2
X
在哪个轴上? N ?只能加于水平
轴(oY )上。
E
V2
?原则:必须人为施加水平轴控制力矩(M y),产生一个u2
使其与v2大小相等,方向相反,才能克服? 2影响。
陀螺罗经指北原理概述
(一)下重式罗经的控制力矩
1. 下重式罗经灵敏(指北)部分的结构:
陀螺转子
Z
核心-液浮、双转子陀螺球
(252mm )
量矩H 矢端以捷径趋向外力矩 M 矢端,作进动运动或
旋进运动。( H →M ) z
例: 1 - 1
M
?p? H
? py M y
P4 Fig1-4
? pz M z
o
y
My
F
H
进动方向: 右手定则
xF
二、 陀螺仪及其特性
陀螺罗经指北原理概述
?
pz
?
My H
;
?
py
?
?
Mz H
陀螺罗经指北原理概述
(一)地球自转产生的影响
液体连通器式:
My 产生方式: 重心下移
液体连通器某端 容器多余液体
M y 指向: 总是指北
总是指南
H指向: X轴正方向
X轴负方向
M y算式: M y ? ? M?
M y ? M?
u2 ? M y ? ? M?
u2 ? ? My ? ? M?
u2 ? ? M?
陀螺罗经指北原理概述
1 )主轴指北端投影图: (下重式罗经为例 )
4 )椭圆运动轨迹的特征:
Z。N的N点不断向W移 动。 南纬?反之
PS
陀螺罗经指北原理概述
?
e
? ?
陀螺罗经指北原理
a rv
=
V cos C
Rewe cos?
1.仅取决于航速(V)、航向(C)、和地理纬度( ? ), 与罗经结构参数无关。任何罗经均会产生速度误差。
2.随船速(V) 、纬度( ? )的增大而增大。
3.航向偏北,αrv>0, 西误差; 航向偏南, αrv<0, 东误差。
4 . 东西航向无误差,南北航向误差最大。
第二章 陀螺罗经误差及其消除
第二节 速 度 误 差(speed error)
五、速度误差的消除
V3
u2 r
V2
V1
(W )
V3
u2 r
V2
V1`
1.查表法: 2.外补偿法:移动刻度盘。 3.内补偿法:施加补偿力矩。
?可施加垂直轴补 偿力矩,产生V1` (E) 以抵消V3。
第二节 冲 击 误 差(Ballistic error)
? 将右手大拇指与四指垂直,四指顺着转 动的方向朝内弯曲,则大拇指所指的方 向即是角速度向量的方向'
Z
F
H X
My Y
? 进动角速度( w)、动量矩和外力矩三者之间是互相
垂直的,进动角速度的方向 (和大小取决于动量矩和外
力矩的方向和大小。
? Wpz = My/H
-Wpy = Mz/H
? Wpy和Wpz是陀螺仪相对于宇宙空间的绝对角速度在 OY
第二章 陀螺罗经误差及其消除
第二节 速 度 误 差(speed error)
二、船舶作恒速恒向运动时的旋转角速度及其在 地理坐标系各坐标轴上的分量;
N VN
C O
V VE E
?设船偏北航行,航速 V, 航向 C 。
VN=VCosC
罗经工作原理(讲义)

2009-05-01 哈尔滨工程大学 自动化学院 23
7.电控陀螺罗经的速度和纬度修正
• 前面的讨论都是在基座不动的情况下所做的分析。如果载 体具有北向速度V N 和东向速度 V ,则地理坐标系相对惯
E
性空间的变化速度(牵连运动)为
Xn
VN R
Yn
VE R
cos
Zn
• 由此两式可以看出,有了 V 和 的影响, 0 , S 0 , 即陀螺主轴并不“水平指北”,这就是所谓的“速纬误 差”。
S
2009-05-01
哈尔滨工程大学 自动化学院
26
• 由于 V 、 及相关的航向 K 都是可测量的,只要在计算机 控制量 和 中增加两个补偿项,就可以实现 S 0 和
• 电控罗经中的摆性是由加速度计或电磁摆输出的信号,经处理后施加 到X轴的力矩器中产生摆性,其作用与前述机械摆性的作用一样,产 生主轴的“上西下东”进动。 • 被陀螺信号器输出的信号经两条稳定回路使伺服环跟踪陀螺坐标系。 这种罗经很容易构成方位仪,只要使摆和水平力矩器(X轴)一起构 成修平回路,方位轴(Z轴)力矩器中施加电流补偿地球自转和载体 运动,使主轴跟踪子午面。因此这种罗经又称为二态罗经。
sin cos 0
X
0 0 1
Z
cos cos sin sin sin
sin cos cos sin cos
• 所以 在罗经坐标系中的分量为
X Y Z Xn T Yn Zn sin cos cos cos cos sin sin cos sin cos sin cos
7.电控陀螺罗经的速度和纬度修正
• 前面的讨论都是在基座不动的情况下所做的分析。如果载 体具有北向速度V N 和东向速度 V ,则地理坐标系相对惯
E
性空间的变化速度(牵连运动)为
Xn
VN R
Yn
VE R
cos
Zn
• 由此两式可以看出,有了 V 和 的影响, 0 , S 0 , 即陀螺主轴并不“水平指北”,这就是所谓的“速纬误 差”。
S
2009-05-01
哈尔滨工程大学 自动化学院
26
• 由于 V 、 及相关的航向 K 都是可测量的,只要在计算机 控制量 和 中增加两个补偿项,就可以实现 S 0 和
• 电控罗经中的摆性是由加速度计或电磁摆输出的信号,经处理后施加 到X轴的力矩器中产生摆性,其作用与前述机械摆性的作用一样,产 生主轴的“上西下东”进动。 • 被陀螺信号器输出的信号经两条稳定回路使伺服环跟踪陀螺坐标系。 这种罗经很容易构成方位仪,只要使摆和水平力矩器(X轴)一起构 成修平回路,方位轴(Z轴)力矩器中施加电流补偿地球自转和载体 运动,使主轴跟踪子午面。因此这种罗经又称为二态罗经。
sin cos 0
X
0 0 1
Z
cos cos sin sin sin
sin cos cos sin cos
• 所以 在罗经坐标系中的分量为
X Y Z Xn T Yn Zn sin cos cos cos cos sin sin cos sin cos sin cos
第一章 陀螺罗经指北原理

(3)阿玛-勃朗系列罗经获得控制力矩的 方式 采用电磁摆(electromagnetic pendulum)和 水平力矩器(horizontal momentat device) 的间接控制法获得控制力矩。 控制力矩的产生方式:
阿玛-勃朗系列罗经的控制设备由电磁摆 和位于陀螺球水平轴上的力矩器组成。 当陀螺球工作,t = t1时,若设陀螺球主 轴水平指东, = 0,电磁摆不输出摆信 号,陀螺球水平轴的力矩器不工作,不 向陀螺球施加控制力矩。
液体连通器产生的控制力矩的大小与罗 经结构参数和陀螺仪主轴高度角有关。 控制力矩M 沿oy轴的方向将随角的 方向而定,使主轴进动的速度用 u2表示, 它使陀螺仪主轴负端自动找北(向子午 面进动): u2 = My= M· 斯伯利系列罗经,为液体连通器罗经, 重力力矩,机械摆式罗经。
T0等于84.4min时,称为陀螺罗经的理 想自由摆动周期,这时若船舶机动航行, 船上的陀螺罗经将不产生第一类冲击误 差。 由摆动周期所对应的纬度称为陀螺罗经 的设计纬度(chosen latitude)(0),设 计纬度是设计罗经时所选取的一特殊纬 度。例如安许茨4型罗经的设计纬度为 60°。
陀螺仪之特性
定轴性(gyroscopic inertia)
在不受外力矩作用时,自由陀螺仪主轴保 持它的空间的初始方向不变。 进动性(gyroscopic precession) 在外力矩作用下,陀螺仪主轴的动量矩H 矢端以捷径趋向外力矩M矢端,作进动运 动或称旋进运动,可记为H→M。
3)陀螺罗经的启动过程 陀螺罗经在控制力矩作用下能够自动找 北,在此基础上,在阻尼力矩作用下, 经过一定的时间就能够稳定指北。 陀螺罗经的适用纬度一般为80以下, 否则罗经指向精度降低或不能正常指向。
第一章 第五节 阿玛-勃朗系列陀螺罗经-2011版

§5-1 概述
l 一、阿玛勃朗型陀螺罗经属于电磁控制式罗经,
是陀螺罗经三大系列产品之一。
l l l l l
l
1.由美国阿玛公司和英国勃朗公司联合研制的。 1 最初为陆用车辆设计,改进被应用于船舶。 2.早期有两种: 2
热形——工作的情况下,支承液体呈液态; —— l 不工作的情况下,支承液体呈固态。 l 冷形——支承液体呈液态。 后来均改进为冷形。 ——
浙江省精品课程 宁波大学海运学院 6
2011921
整套阿玛 勃朗MK10 型陀螺罗 经的组成 图
2011921
浙江省精品课程
宁波大学海运学院
7
§5-2 主罗经结构
l一、灵敏部分
l 灵敏部分由陀螺球、浮动平衡环及垂直
金属扭丝等组成。
2011921
浙江省精品课程
宁波大学海运学院
l 1)船电开关位于断的(OFF)位置 l 2)开关接线箱上的电源开关和分罗经开关
位于断的(OFF)位置 l 3)主罗经控制面板上的电源开关和照明旋 钮位于断的(OFF)位置 l 4)主罗经控制面板上的照明旋钮位于断的 (OFF)位置 l 5)旋转速率(SLEW RATE)的指针标记位于 垂直向上的位置
l 3.只能工作在陀螺罗经状态。 l 3 l
(无双态工作方式)
2011921 浙江省精品课程 宁波大学海运学院 5
三、阿玛-勃朗10型陀螺罗经 的主要技术性能
l l l l l l l l l l l l l l l l l l l l
1.直航指向精度为±0.75° 1 0.75 2.大风浪天气航行,指向精度≤±2° 2 3.适用航速0~60节 3 0~60 4.适用纬度80°N~80°S 4 80 5.稳定时间≤6h。 5 由偏北10°至稳定±0.5°内,只需40分钟 10 0 6.船电要求:380V 50HZ 3φ或440V 60HZ 3φ 6 380 V 50HZ 3 440 V 60HZ 3 7.陀螺马达:26V 400HZ 3φ 转速12000转/分 7 26 V 400HZ 3 寿命40000h 8.工作温度:0~+55° 8 0~+55 9.可带动20个分罗经。为直流步进式分罗经。 9 20
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Z
W2
S
E
H
N
只能加于水平 轴(oY)上。
结论:人为施加水平轴控制力矩(My)克服W2影响。
二、控制力矩的获得
重 力 控 制 力 矩 电 磁 控 制 力 矩
获 得 控 制 力 矩 的 方 法
重心下移法—下重式罗经 (如:安许茨系列罗经) 重心上移法—液体连通器式罗 经 (如:斯伯利系列罗经)
电磁控制法—电磁控制罗经 (如:阿玛勃郎系列罗经)
2.主轴指北端相对于水平面的视运动
(以主轴指北端初始偏子午面东侧为例) 由于W1y ,主轴指 北端一侧水平面不 断下沉,则人看到 主轴指北端将上升。
Z。 Z W1y S E W1x W
V1=H W1y =H W1sinα≈ HW1 α Y W1 V1 X H
若指北端初始 偏西呢?
N
•指北端初始偏西:
概述一:航海仪器的分类
无线电导航仪器:
航
海
仪
器
电航仪器: 陀螺罗经(Gyrocompass) 测深仪(Echo-sounder) 计程仪(ship’s log)
磁罗经(Magnetic-compass)
概述二:电航仪器的作用
指示航向
heading
真北 航 向
船 首 向
90
north
0 270
180
V1
4.椭圆运动轨迹的特征:
M •椭圆轨迹呈扁 平状。 •椭圆运动周期 (E) 又称等幅摆动 周期(T0)。 M’
(W)
N
T0 2
H MW 1
结论:下重式罗经在施加了控制力矩后,其 主轴指北端运动轨迹为一等幅摆动的椭圆,并 不能稳定在子午面上。 液体连通器罗经的等幅运动分析同下重式罗经
第五节
Z
Z X H X
My=-mgsinθa
= - M sinθ ≈ - M θ
Z0
O
U2= My =-M θ
a
H
G
•U2的方向:
东
O
西
1
mg
水平面之上,>0, 偏西 ;
θ
G
θ
2
地球自转
水平面之下,<0, 偏东 ;
四、液体连通器罗经的控制力矩
1.液体连通器罗经灵敏(指北)部分的结构:
N
Z
O
S
X
H
动量矩 H指南(ox轴负向)
三、下重式罗经的控制力矩
1.下重式罗经灵敏(指北)部分的结构:
Z
陀螺转子 O a G
动量矩 H 指北
H
重心G下移7-8mm X
重心 陀螺球
2.重心下移后如何使主轴自动找北?
A主轴初始水平指西
Z Z
O
Z0
H 西 mg
H
G X
东
G
X
1
θ 2
地球自转
B主轴初始水平指东
结论:在重力控制力矩的作用下主 轴指北端能自动找北。
Z
•My=2R2Sρgsinθ
N
O
X
西
1
•
=Mθ
•U2=-My=-M θ •U2的方向: 水平面之下,偏东 水平面之上,偏西
H
2
X 东
mg
地球自转
陀螺仪+视运动+控制力矩+阻尼力矩=陀螺罗经
五、下重式罗经的等幅摆动
M
1.主轴指北端投影图:
W M W θ M’ N
P(α, θ) E
α
N
M’ 投影面
We
2
H
E
H
W
H
E
(C)北纬任意某处
初始时,设主 轴水平指北。
N
N
α
S
T=0
S T=6h
随着地球自转, 主轴指北端与子 午面出现方位偏 角α 。
(C)北纬任意某处
初始时,设主 轴水平指北。 θ 经过12小时后, 主轴指北端与水 平面出现高度倾 角θ。 •结论:北纬处自 由陀螺仪在方位 和高度上均出现 变化。
Z 。
W2
先回顾自由陀螺仪的视 运动规律
S E
-W2
H
V2
W
x
W2使得自由陀螺仪指 N 北端产生相对于子午面的 运动,是其不能稳定指北 的主要原因。
•问题:如何克服W2的影响?
设法人为产生一个U2使其与V2大小相等,方向相反。
•问题:如何实现?
Z。 利用陀螺仪的进 动性,施加外力矩, 产生U2。 Y M y W U2 X V2 •问题:力矩施加 在哪个轴上?
PN
•W2:在北纬使子午面S Z。N的N点不断向W移 动。(南纬反之)
PS
五、自由陀螺仪主轴指北端的视运动规律
1.主轴指北端相对于子午面的视运动
以 北 纬 某 点 为 例 S
E
-W2
Z。
由于W2的影响, 人看到主轴指北端 将不断向东运动。 V2=HW2
W2
H
V2
W
N
南纬处呢?
赤道处呢?
S S N
N
O
G G
O
国产航海I型液体阻尼器
德国安许茨液体阻尼器
二、水平轴阻尼法
(为下重式罗经所采用)
1.定义:由阻尼设备产生水平轴的阻尼力矩以实现阻 尼的方法。 2.原理: 要求阻尼力矩引起 的进动线速度(U3) 总是指向子午面。 1、3象限 —θ减幅< θ等幅 2、4象限 —α 减幅< α等幅 渐次衰减至稳定位置r U3 M 2 1 U3
dH M u dt
1.定轴性 ( M =0 ) 2.进动性 ( M 0 )
五、进动角速度与外力矩的关系
Wp
H
u
F
O
M
根据:线速度 角速度 矢径 则:U WP H 又 M U M WP H M WP (进动公式) H
摆式罗经的减幅摆动
一、阻尼的目的与方法:
1.阻尼的目的
将等幅运动变 为减幅运动,最后 衰减至子午面上的 某个稳定位置,以 (W) 实现稳定指北。
M
N
(E)
2.阻尼的方法
压缩长轴法——水平轴阻尼法
M’
压缩短轴法——垂直轴阻尼法
3.下重式罗经水平轴阻尼的实现:
A阻尼器结构:液体阻尼器沿南北放置,内有高粘度硅油。
复习时记住的名词:
1.陀螺仪
2.平衡陀螺仪 3.自由陀螺仪 4.定轴性 5.进动性
一、转子及其动量矩( H)
H J
动量矩 转动惯量 角速度
o
H : 代表转子转动强弱的物 理量, 其 方向与 相同
H
—角速度
(J 转动惯量 )
(动量P mV )
在地球上的人 看到的主轴的运动与 人看到的太阳或恒星 的运动具有相似性。
三、地球上看到的陀螺仪视运动现象:
(A) 北
We
极
点 处
H
现象:地球自西向东旋转一周,陀螺仪 主轴在方位上指向改变360º 。
(B)赤道某处:
E 1 W
HW
E 4 W 3
现象:地球自西向东旋 转一周,陀螺仪主轴在 高度上指向改变360º 。
概述二:电航仪器的作用
测量水深(测深仪)
D
D M U
H h
概述二:电航仪器的作用
测量航速(计程仪)
V
D M U
第一部分
陀螺罗经
第一章 陀螺罗经的指北原理 第一节 预备知识
一、转子及其动量矩( H)
H J
动量矩 转动惯量 角速度
o
H : 代表转子转动强弱的物 理量, 其 方向与 相同
θ
P
E
西
北
南
东
线速度
2 主 轴 指 北 端 运 动 线 速 度
产 生 原因
W1
公式
规 律
.
V1 (上升/下降) V1=HW1α 方向:东升西降 大小:与α成正比 V2 (偏东/偏 西) W2 V2=HW2 方向: 北纬东偏,南纬西偏 大小:纬度一定,V2不 变 方向: 水平面之上,U2偏西 水平面之下,U2偏东 大小:与θ成正比 U2 (控制线速 度) My (控制 力矩) U2=Mθ
高度角θ:陀螺仪 主轴与水平面之间 的垂直夹角。
上负下正
Z。 Z X θ O 方位角α:陀螺仪 主轴与子午面之间 的水平夹角。 东负西正 N
W
S
E
Y
二、视运动概念:
Question:
1.人坐车前进时感觉到路两旁的树在不 断地向后运动,为什么? 2.地球的运动规律?地球上的人看到 太阳东升西落,是太阳的运动吗? 3.将陀螺仪的主轴初始指向地球上 某一方位,人会看到它的指向始终 不变吗?
二、转子所受的力矩( M )
M
r
O
已知F的方向可由右手定则 F 判定M的方向
M rF 力矩 力臂 力
二、转子所受的力矩( M )
M
r
O
已知F的方向可由右手定则 F 判定M的方向
M rF 力矩 力臂 力
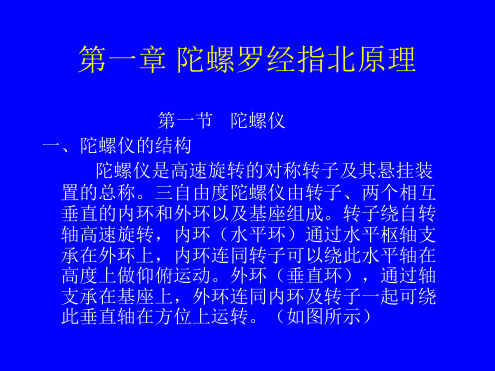
二、陀螺仪结构
1.转子
2.主轴(ox) 3.内环(oY—水平轴) 4.外环(oz—垂直轴) 5.主轴的三自由度 两个重要定义: 平衡陀螺仪
自由陀螺仪
二、陀螺仪结构
两个重要定义:
平衡陀螺仪: 若三自由度陀螺仪的重心与其 支架点相重合,这种陀螺仪称为平衡陀螺仪。 自由陀螺仪:不受任何外力矩作用的三自由 度平衡陀螺仪称为自由陀螺仪。
动量矩定理——
转动力学中的动量 矩定理: d dH M JJ dt dt