基于STM32的以太网通信模块设计
STM32的W5500以太网通信模块快速实现方法
接口外扩 W5500以太网控制器来搭建模块硬件,然后利用 STM32CubeMX 快速完成 STM32F407初 始 化 配 置 程 序 的 设
计,再利用 W5500官方库函数快速完成以太网通信 程 序 的 开 发,同 时 为 提 升 以 太 网 通 信 速 率,对 W5500 官 方 库 函 数 实
施了优化。最后为了验证设计方案的有效性及测试通信速率,设计 了 基 于 LabVIEW 的 测 试 软 件。 实 验 结 果 表 明,利 用
本 文 提 出 的 方 案 可 较 快 实 现 以 太 网 通 信 模 块 的 开 发 ,且 通 信 速 率 比 优 化 前 提 高 接 近 两 倍 。
关 键 词 :STM32CubeMX;W5500;LabVIEW;网 络 速 率 测 试 ;SPI
STM32的 W5500以太网通信模块快速实现方法
杨 红 波 ,朱 磊 ,张 博 ,鲁 露
(西 安 工 程 大 学 电 子 信 息 学 院 ,西 安 710048)
摘要:提出了一种基于 STM32CubeMX 的 W5500以太网通信模块快速实现方案。该方案先 以 STM32F407 处 理 器 SPI
近 年 来 开 发 STM32 比 较 流 行 的 一 个 工 具 STM32CubeMX,它是意 法 半 导 体 的 主 动 原 创 工 具,可 以 缩短开发的工作时 间,降 低 费 用,它 也 是 一 个 图 形 化 的 工 具,配置和完 成 开 发 初 期 关 于 芯 片 相 关 的 一 些 初 始 化 代 码 。 [8] 同 时 也 集 成 了 一 个 全 面 的 软 件 平 台 ,支 持 STM32 每一个系列的 MCU 开发。快速 完 成 初 始 化 代 码 的 配 置, 提高了代 码 编 写 速 度。 W5500 是 WIZnet公 司 推 出 的 一
基于STM32的水产养殖水质监测系统的设计

基于STM32的水产养殖水质监测系统的设计简介水产养殖业是一项重要的农业产业,而水质是养殖过程中需要特别关注的关键因素之一。
为了提高水产养殖的效益和可持续发展,我们需要对水质进行实时监测和控制。
基于STM32的水产养殖水质监测系统的设计旨在解决这一问题,通过测量水质参数,提供实时数据监测和远程控制功能,以帮助养殖户更好地管理养殖过程。
系统设计方案硬件设计STM32单片机选择为了满足水质监测系统的实时性和稳定性要求,我们选择了STM32系列单片机作为系统的主控芯片。
STM32单片机具有较高的计算能力和丰富的外设资源,适用于实时数据处理和控制。
传感器选择水质监测系统需要测量多种水质参数,例如温度、溶解氧、酸碱度等。
针对不同的参数,我们选择了相应的传感器作为监测模块的输入设备。
以温度传感器为例,我们可以选择DS18B20数字温度传感器,它具有较高的精度和稳定性。
通信模块选择为了实现远程监测和控制功能,我们需要选择合适的通信模块。
常用的通信方式包括以太网、Wi-Fi和蓝牙等。
根据实际需求,我们可以选择ENC28J60以太网模块进行网络通信。
软件设计系统架构基于STM32的水产养殖水质监测系统的软件架构采用分层设计,包括应用层、驱动层和硬件抽象层。
其中应用层负责实时数据处理和远程控制,驱动层负责与传感器和通信模块的交互,硬件抽象层提供底层硬件操作接口。
系统通过传感器实时采集水质参数数据,并通过驱动层将数据传递给应用层。
应用层对数据进行处理和分析,生成报表和图表,提供实时的水质监测结果。
远程监控与控制系统通过通信模块与服务器进行数据交互,实现远程监控和控制功能。
用户可以通过手机App或者Web页面查看实时的水质监测数据,远程控制养殖设备的运行状态。
功能实现实时数据监测基于STM32的水产养殖水质监测系统可以实时监测多个水质参数,如温度、溶解氧、酸碱度等。
通过传感器采集的数据可以准确反映养殖环境的水质状况。
报警机制系统在检测到水质异常情况时,可以发出报警信号,提醒养殖户及时采取措施。
基于STM32 CAN-Ethernet网关的设计
Ab s t r a c t :Th e me a s u r e o f s p l i t t i n g a n d r e p a c k a g i n g d a t a p a c k e t s i s u s e d t o p e r f o r m d a t a t r a n s f o r ma t i o n b e t we e n d i f f e r e n t n e t — wo r k p r o t o c o l s .Th e d r i v e p r o g r a ms o f C o n t r o l l e r Ar e a Ne t wo r k ( CAN )c o n t r o l l e r ,E t h e r n e t c o n t r o l l e r ,S D c a r d a n d r e l a t e d
t h e UCOS - I I OS . A c o mp l e t e CAN— Et h e r n e t g a t e wa y wi t h t h e f u n c t i o n o f r e a l - t i me d a t a s t o r a g e i s d e v e l o p e d o n t h e b a s i s o f t h e mi c r o c o n t r o U e r S TM 3 2 . Ke y w o r d s :CAN— Et h e r n e t ;CAN b u s p r o t o c o l ;RTOS;LW I P
STM32+CH395Q(以太网)基本控制篇(自建物联网平台)-硬件使用说明

STM32+CH395Q(以太⽹)基本控制篇(⾃建物联⽹平台)-硬件使⽤说明<p><iframe name="ifd" src="https:///resource/cnblogs/ZLIOTB/CH395Q/my.html" frameborder="0" scrolling="auto" width="100%" height="1500"></iframe></p>开发板原理图:开发板购置链接:所属系列: 指路者系列开发板型号: ZLIOTB板载说明:①主控芯⽚: STM32F103RET6②以太⽹模组: CH395Q(硬件TCP/IP协议栈,⽀持串⼝,SPI,并⼝通信)③基本外设: 液晶OLED(IIC); RGB三⾊灯; 温湿度传感器(DHT11); 光敏电阻(5516); 继电器(5脚10A); 蜂鸣器④通信接⼝: 485通信(SP485EEN); CAN总线(TJA1050T);串⼝分配情况⼀,单⽚机串⼝1和串⼝芯⽚连接(CH340),作为下载和调试使⽤⼆,单⽚机SPI2⼝和模组连接(程序默认使⽤SPI和模组通信)三,单⽚机使⽤PA0作为模块中断检测引脚四,单⽚机使⽤PA8作为复位模块引脚五,单⽚机串⼝3和TTL转485信号芯⽚连接下载单⽚机程序(串⼝⽅式)1.开发板使⽤的串⼝芯⽚为 CH340C,如果没有安装过CH340驱动,需要安装驱动2.安装步骤3.使⽤USB线(Micro)连接开发板4.如果电脑提⽰安装硬件驱动 ,等待安装完成,然后右击 "我的电脑" 选择管理5.点击设备管理器,点击端⼝查看当前电脑和开发板通信的端⼝号我的为 COM4 (不同的电脑端⼝号不⼀样,只要有端⼝号就可以)6.打开串⼝下载软件7.打开软件,选择对应的端⼝号8.选择随意⼀个⼯程⾥⾯的 hex⽂件注:所有⼯程hex⽂件路径⼯程⽬录--> Progect --> output9.短接BOOT 和 3.3V10.按下复位STM32按钮,然后松开11. 点击开始编程12.以下为烧录程序中,和烧录成功页⾯13.去掉短接,重新复位⼀下STM32即可运⾏程序下载单⽚机程序(SWD⽅式)预留了SWD接⼝下载单⽚机程序,⽤户可以使⽤ST-LINK或Jlink下载。
奋斗STM32开发板uIP1.0 以太网例程讲解
奋斗版 STM32 开发板例程文档———uIP1.0 ENC28J60 以太网例程uIP1.0 ENC28J60 以太网例程实验平台:奋斗版STM32开发板V2、V2.1、V3 实验内容:本例程演示了在奋斗STM32开发板上完成ARP,ICMP,TCP服务器、WEB 服务器以及UDP服务器,该实验学习了基于uIP1.0网络协议栈的程序编制。
预先需要掌握的知识1.ENC28J60ENC28J60是MICROCHIP公司的带SPI 接口的独立以太网控制器, 以太网控制器特性 • IEEE 802.3 兼容的以太网控制器 • 集成MAC 和10 BASE-T PHY • 接收器和冲突抑制电路 • 支持一个带自动极性检测和校正的10BASE-T 端口 • 支持全双工和半双工模式 • 可编程在发生冲突时自动重发 • 可编程填充和CRC 生成 • 可编程自动拒绝错误数据包 • 最高速度可达10 Mb/s 的SPI 接口 缓冲器 • 8 KB 发送/ 接收数据包双端口SRAM • 可配置发送/ 接收缓冲器大小 • 硬件管理的循环接收FIFO • 字节宽度的随机访问和顺序访问(地址自动递增) • 用于快速数据传送的内部DMA • 硬件支持的IP 校验和计算 介质访问控制器(MAC)特性 • 支持单播、组播和广播数据包 • 可编程数据包过滤,并在以下事件的逻辑“与” 和“或”结果为真时唤醒主机: - 单播目标地址 - 组播地址 广播地址 - Magic Packet - 由64 位哈希表定义的组目标地址 - 多达64 字节的可编程模式匹配(偏移量可由用户定义)淘宝店铺:1奋斗版 STM32 开发板例程文档———uIP1.0 ENC28J60 以太网例程• 环回模式 物理层(PHY)特性 • 整形输出滤波器 • 环回模式 工作特性 • 两个用来表示连接、发送、接收、冲突和全/ 半双工状态的可编程LED 输出 • 使用两个中断引脚的七个中断源 • 25 MHz 时钟 • 带可编程预分频器的时钟输出引脚 • 工作电压范围是3.14V 到3.45V • TTL 电平输入 • 温度范围:-40°C 到+85°C (工业级), 0°C 到 +70°C (商业级)(仅SSOP 封装) • 28 引脚SPDIP、SSOP、SOIC 和QFN 封装概述ENC28J60 是带有行业标准串行外设接口(SerialPeripheral Interface,SPI)的独立以太网控制器。
stm32与rmii通信原理
STM32与RMII通信原理1. 概述RMII(Reduced Media Independent Interface)是一种用于连接嵌入式系统和以太网物理层的接口标准。
STM32是一系列由STMicroelectronics开发的32位ARM Cortex-M微控制器。
本文将详细介绍STM32与RMII通信的基本原理。
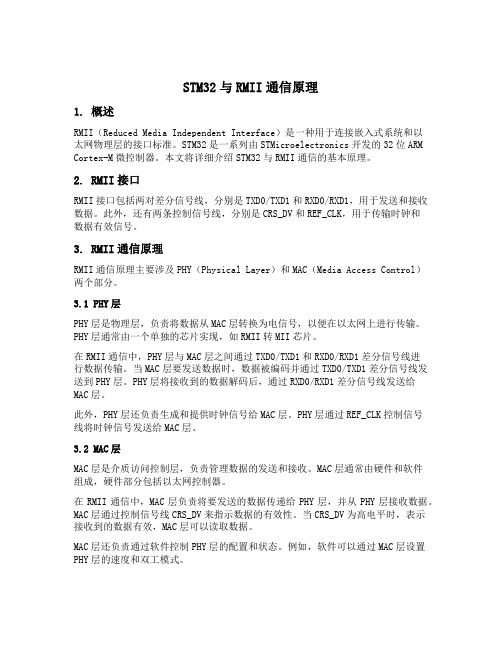
2. RMII接口RMII接口包括两对差分信号线,分别是TXD0/TXD1和RXD0/RXD1,用于发送和接收数据。
此外,还有两条控制信号线,分别是CRS_DV和REF_CLK,用于传输时钟和数据有效信号。
3. RMII通信原理RMII通信原理主要涉及PHY(Physical Layer)和MAC(Media Access Control)两个部分。
3.1 PHY层PHY层是物理层,负责将数据从MAC层转换为电信号,以便在以太网上进行传输。
PHY层通常由一个单独的芯片实现,如RMII转MII芯片。
在RMII通信中,PHY层与MAC层之间通过TXD0/TXD1和RXD0/RXD1差分信号线进行数据传输。
当MAC层要发送数据时,数据被编码并通过TXD0/TXD1差分信号线发送到PHY层。
PHY层将接收到的数据解码后,通过RXD0/RXD1差分信号线发送给MAC层。
此外,PHY层还负责生成和提供时钟信号给MAC层。
PHY层通过REF_CLK控制信号线将时钟信号发送给MAC层。
3.2 MAC层MAC层是介质访问控制层,负责管理数据的发送和接收。
MAC层通常由硬件和软件组成,硬件部分包括以太网控制器。
在RMII通信中,MAC层负责将要发送的数据传递给PHY层,并从PHY层接收数据。
MAC层通过控制信号线CRS_DV来指示数据的有效性。
当CRS_DV为高电平时,表示接收到的数据有效,MAC层可以读取数据。
MAC层还负责通过软件控制PHY层的配置和状态。
例如,软件可以通过MAC层设置PHY层的速度和双工模式。
基于STM32的以太网通信模块设计

基于STM32的以太网通信模块设计引言以太网通信是当今许多嵌入式系统中不可或缺的一部分。
它提供了快速、安全和可靠的数据传输方式,使得设备能够与其他设备或云服务进行通信。
STM32是常用的嵌入式系统开发板,具有强大的处理能力和丰富的外设接口,非常适合用于以太网通信模块的设计。
本文将介绍如何基于STM32设计一个简单的以太网通信模块。
1.系统架构设计在设计以太网通信模块之前,首先需要了解整个系统的架构。
一般来说,以太网通信模块由硬件和软件两部分组成。
硬件部分主要包括STM32开发板和以太网PHY芯片。
以太网PHY芯片负责将数字信号转换为模拟信号,并通过以太网接口与外部网络连接。
STM32开发板通过接口与PHY芯片进行通信,并负责处理网络数据的收发。
软件部分主要包括驱动程序和网络协议栈。
驱动程序负责与PHY芯片进行通信,控制数据的收发。
网络协议栈实现了TCP/IP协议栈,包括IP、TCP和UDP等协议。
它负责处理数据包的组装和解析,以及网络连接的建立和断开。
2.硬件设计硬件设计主要涉及PHY芯片与STM32开发板之间的连接和接口配置。
PHY芯片通常使用RMII(Reduced Media Independent Interface)接口与STM32开发板连接。
在STM32上配置相应的引脚和寄存器,使其与PHY芯片进行通信。
为了方便调试和监测网络状态,可以在硬件设计中添加LED指示灯,显示网络连接状态。
3.软件设计软件设计主要涉及驱动程序和网络协议栈的开发。
驱动程序可以使用STM32的标准外设库进行开发。
根据PHY芯片的型号和通信接口,编写相应的驱动程序,实现数据的发送和接收。
网络协议栈可以使用第三方库,如lwIP(Lightweight IP)等。
lwIP是一个开源的TCP/IP协议栈,提供了各种网络协议的实现,支持多种硬件平台。
在软件设计时,需要根据具体需求配置网络协议栈的参数,如IP地址、子网掩码、默认网关等。
基于STM32实现IEC61850标准转换器设计方案选择
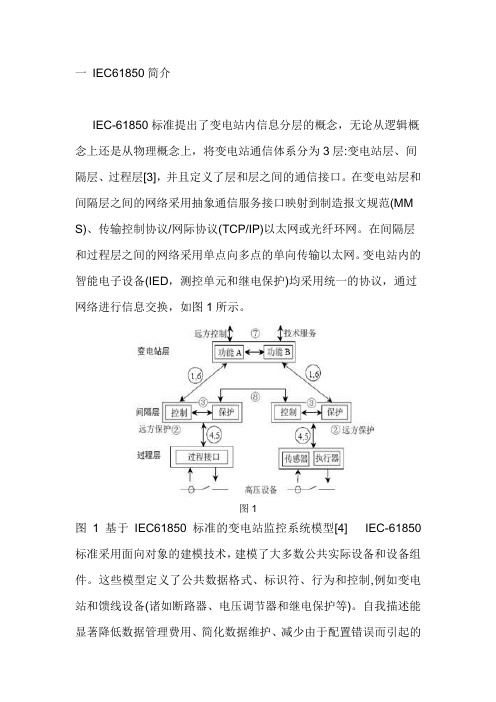
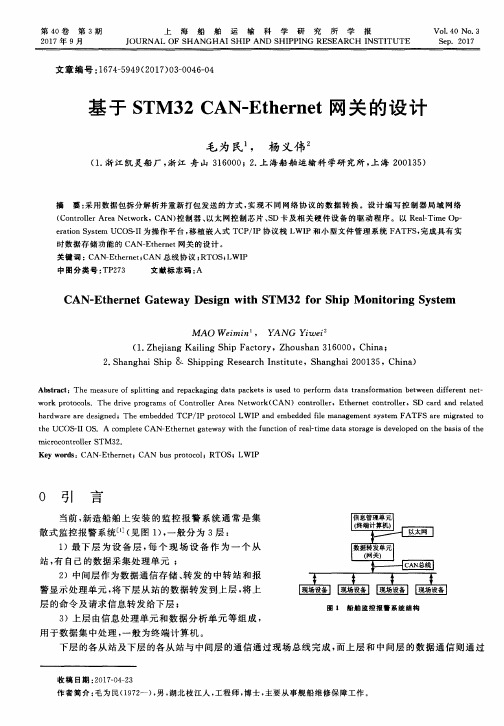
一IEC61850简介IEC-61850标准提出了变电站内信息分层的概念,无论从逻辑概念上还是从物理概念上,将变电站通信体系分为3层:变电站层、间隔层、过程层[3],并且定义了层和层之间的通信接口。
在变电站层和间隔层之间的网络采用抽象通信服务接口映射到制造报文规范(MM S)、传输控制协议/网际协议(TCP/IP)以太网或光纤环网。
在间隔层和过程层之间的网络采用单点向多点的单向传输以太网。
变电站内的智能电子设备(IED,测控单元和继电保护)均采用统一的协议,通过网络进行信息交换,如图1所示。
图1图 1 基于IEC61850标准的变电站监控系统模型[4] IEC-61850 标准采用面向对象的建模技术,建模了大多数公共实际设备和设备组件。
这些模型定义了公共数据格式、标识符、行为和控制,例如变电站和馈线设备(诸如断路器、电压调节器和继电保护等)。
自我描述能显著降低数据管理费用、简化数据维护、减少由于配置错误而引起的系统停机时间。
但是由于过程层的实现对于一次设备智能技术要求非常高,目前国内对于IEC-61850的应用还局限于在站控和间隔两个层面。
也就是说的IEC61850标准转换设备,要求能够达到承上启下的作用,实现IEC61850标准平台和每个底层设备不同通信协议的转换。
目前IEC61850使用以太网技术,不同的服务队时间要求有所不同,所以选用不同的通信协议栈。
采样值传输主要用于过程层和间隔层之间实时传输采样值,要求比较小的时间延时,所有应用层和逻辑链路之间不使用协议,使用以太网的多播方式。
GOOSE用于间隔层设备之间的横向逻辑闭锁,实时性要求很高,从发送到接受方要求小于4ms。
为达到高速传输目的直接将应用层数据映射到ISO/IEC8802-3定义的物理链路层。
通用变电站状态事件(GSSE)使用OSI协议。
核心的ACSI(抽象通信服务接口)在应用层使用MMS协议,在传输层使用TCP/IP协议。
二1EC61850标准转换设备实现要求和实现方案实现IEC61850标准,要求本设备能够使用变电站配置语言SCL 语言完整的描述IED或整个变电站数据模型、通信服务模型,并且映射到TCP/IP网络。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
软件给以太网控制器发送数据,以太网控制器将数据发送给 处 理 器 ,并 且 能 够 测 量 通 信 速 率 。
处
理
_行
器
通倌
模
接 11
块
串行
太
以太
通倌
网
网
接n
模
按 II
块
GUI软 件
以太 网
接 II
PC机
1 系统总体设计 本文提出的基于STM3 2 的以太网通信模块设计,是单片
机 的 配 套 系 统 设 计 ,可 以 使 单 片 机 拥 有 更 加 快 捷 方 便 的 实 现 以 太 网 功 能 的 模 块 。该 系 统 具 体 功 能 如 下 :
在 本 系 统 硬 件 设 计 过 程 中 ,处 理 器 模 块 与 以 太 网 模 块 通 过 串 行 通 信 接 口 连 接 ,以 太 网 模 块 与 P C 机 使 用 以 太 网 接 口 连
(3)
实现以太网数据通信时,必须满足处理器端处理后的接 ,实现数据传输,根据系统和设计的需求,分别对以太网控
图 1 基 于 STM3 2 的以太网通信模块的系统方案设计 2 系统硬件设计
基 于 STM3 2 的以太网通信模块的硬件设计主要包括处
(1)
在 满 足 以 太 网 TCP/IP协 议 的 情 况 下 ,实现 以 太 网 的 通理 器 模 块 和 以 太 网 模 块 的 硬 件 设 计 。
信功能; (2) 能够实现数据的接收与发送,且 传 输 速 率 为 300kb/S;
参考文献:
[ 1 ] 广东省智能软件与机器人分会、华南理工大学智能软件 与机器人教研室.《广东省机器人大赛-接力赛机器人说明 手册》2014.10.
[2] 赵姝颖,胡样梁,蓝冬英,刘朋.机器人比赛及其关键技术[J]. 机器人技术与应用,2012(6).
[3] 刘远明,高晓,胡瑞,李莉.感应式火炬接力机器人设计与制 作 [J].电子世界,2012(9).
统由以太网模块、处理器模块、上位机组成,上 位 机 通 过 GUI 足各种网络协议。考虑到通信模块的处理器需要占用硬件资
图 9 机器人拼装示例图
核 心 的 接 力 机 器 人 设 计 ,能 够 实 现 碰 撞 检 测 、电 机 控 制 、颜色 检测、接力竞赛的功能。该机器人经试验并获得2 0 1 6 年该项 比 赛 的 冠 军 ,表 明 运 行 较 为 可 靠 。另 外 ,制 作 简 单 ,调试方便, 这些特点有利于促进学生的机器人竞赛等科技活动的开展, 值得广泛推广。
图 1 0 颜色识别模块结构图及其改进 3 结论
本文提出一种使用兼容Arduino的 ATme),男 ,硕 士 ,广东省韶关市人,信息系 统 管 理 师 (高 级 ) 、嵌 入 式 系 统 设 计 师 ,专 业 带 头 人 ,研 究 方 向 : 人 工 智 能 、嵌 入 式 技 术 应 用 。 基金项目:2016-2017学年广东岭南职业技术学院科研重点课 题 (KA201602)、教育教学改革一般课题(JB201602)。
标达到了设计要求。
关 键 词 :以太网模块;处理器模块;CH395;STM32F407
中图分类号:TP332
文献标识码:A
文 章 编 号 :1673-1131(2017)12-0118-02
0 引言
以太网是当今居于主导地位的局域网技术,以太网是建 立 在 CSMA/CD机制上的广播线网络,以太网作为一种原理 简 单,便于实现同时又价格低廉的局域网技术,已经成为业界 的主流,而更高性能的快速以太网和千兆以太网的出现更使 其 成 为 最 有 前 途 的 网 络 技 术 ,越 来 越 追 求 传 输 的 速 度 和 质 量 。
可工作的系统。
序设计包括主程序设计、CH3 9 5 初始化程序、SPI驱动程序设
(2)
以太网模块。以太网模块主要选用以太网芯片CH395计 、中断服务程序设计,实现以太网通信功能进行数据的接收
连接供电电路、S P I串口连接电路和RJ4 5 接口电路实现以太
(1)
处理器模块。主 要使用 STM32F4 0 7 单片机最小系统,e M X 的 STM32F4 0 7 初 始 化 程 序 和 基 于 Keil MDK5 的
用供电电路、JTAG电路、时钟电路和复位电路搭建了 STM32F407
STM32F4 0 7 程序设计,其中基于Keil MDK5 的 STM32F4 0 7 程
大量数据能够实时、可 靠 和准确地传输到P C 端 ,保证数据包
制 器 、处理器作出了选择。为实现以太网的通信功能、网络协
在传输过程中的准确性。 为实现以上的系统功能,提 出 方 案 如 图 1 所示。整个系
议 的 简 单 化 ,要 使 得 以 太 网 芯 片 满 足 各 种 协 议 ,所以本设计中 采 用 以 太 网 协 议 芯 片 CH395,此 芯 片 中 内 置 各 种 协 议 ,可 以 满
与 基 于 CH3 9 5 的以太网模块通过串行通信接口连接,P C 机 与 基 于 CH3 9 5 的以太网模块使用以太网接口连接,单片机
STM32F4 0 7 直接通过命令调用CH3 9 5 自带的库函数,并 采 用 CH3 9 5 内置的TCP/IP协议栈把单片机配置成服务器,用
上 位 机 LabVIEW作为客户端与其进行数据通信。实验证明,基 于 STM3 2 的以太网通信模块能实现数据传输且参数指
2017年 第 1 2 期 (总第 180 期)
信息通信 INFORMATION & COMMUNICATIONS
2017 (Sum. No 180)
基 于 STM3 2 的以太网通信模块设计
张文潇,王 鑫 (西安工程大学电子信息学院,陕 西 西 安 710048)
摘 要 :设计的以太网通信模块能够实现以太网通信功能,完成数据的收发功能。该系统是 由 基 于STM32F4 0 7 的处理器
信息通信
张文潇等:基于STM3 2 的以太网通信模块设计
源较少且速率较快的SPI接口,满足设计的需求,因此我们选 3 . 2 基 于 STM32F4 0 7 服 务 器 的 程 序 设 计
用了 STM32F4 0 7 单片机。
基 于 STM32F4 0 7 的处理器程序设计包含基于STM32Cub-