两相混合式步进电机建模与仿真
基于Modelica_Dymola的二相混合式步进电动机建模与仿真

基于Modelica/Dymola 的二相混合式步进电动机建模与仿真*何义姚锡凡(华南理工大学机械与汽车工程学院,广州510640)Modeling and simulation of two-phase hybrid stepping motor based on modelica/dymolaHE Yi ,YAO Xi-fan(Department of Mechanical and Automobile Engineering ,South China University of Technology ,Guangzhou 510640,China )文章编号:1001-3997(2010)06-0074-02【摘要】Dymola 是基于统一建模语言Modelica 对物理系统进行建模与仿真的平台。
Dymola 充分发挥Modelica 语言的优点,并能够快速、形象地建立模型。
在二相混合式步进电动机数学模型建立的基础上,运用Modelica 语言在Dymola 上建模和仿真。
仿真结果表明,二相混合式步进电动机模型效果良好,能够满足实际要求。
关键词:Modelica ;Dymola ;二相混合式步进电动机【Abstract 】Dymola is the platform of modeling and simulation for physical system based on the uni -fied modeling language Modelica.Dymola gives full play to the advantages of Modelica language and is able to set up the model quickly and visually.Modeling and simulation is implemented in Modelica lan -guage under Dymola environment on basis of mathematical model of two -phase hybrid stepping motor.Simulation results showed that the model of two-phase hybrid stepping motor was fine and could meet the practical requirements.Key words :Modelica ;Dymola ;Two-phase hybrid stepping motor中图分类号:TH16,TP391.9,TM383.6文献标识码:A*来稿日期:2009-08-08*基金项目:国家“863”高技术研究发展计划(2007AA04Z111)1引言二相混合式步进电动机应用最为广泛,是步进电动机的主流。
两相混合式步进电机系统研制
两相混合式步进电机系统研制1课题研究背景步进电动机是一种受电脉冲信号控制的无刷式直流电动机,也可以看作是在一定频率范围内转速与控制脉冲频率同步的同步电机。
具有定位精度高、可控性好、工作稳定可靠、控制简单、造价便宜、性能可靠的特点。
因而其被广泛应用在数控设备、机械手、绘图机、印刷和包装设备等工业、军事和医疗自动化领域中。
进电机及其系统存在低速容易振荡、高速转矩变小、失步等缺点,阻碍和制约了步进电机的发展,因而其常用于低速驱动。
2系统组成与CortexM3微控制器分析2.1系统组成整个系统由上位机、步进电机驱动器、步进电机、220V交流电转5V直流电变压器、STM32微控制处理器、控制板等部分组成。
2.2CortexM3微控制器CortexM3内核既包含了适用于传统的Thumb指令译码器又拥有新型Thumb2指令译码器,同时,它还拥有一个支持硬件乘法和硬件除法的先进ALU、控制逻辑和用于连接处理器其他部件的接口。
CortexM3处理器与系统部件之间的连接时通过紧耦合的方式来实现的,这么做的好处是减小了芯片面积,与现有的三级流水线内核相比,其面积可以缩小了30%左右。
同时,CortexM3处理器实现了Thumb2指令集构架,代码密度高,既能满足32位ARM指令集的性能,同时也能降低存储器的需求。
3电源电路设计电源电路的设计采用具有稳压精度高,输出电压稳定,电压纹波很小,输出电流能力强等特性的线性集成稳压电源芯片。
电源系统采用数字电源和模拟电源分开设计,分别为控制板上的数字电路模块和模拟电路模块供电。
为保证较好的电源整体以及保证电路板的穩定性和可靠性,在所设计的直流电源电路中需要抑制噪声电压,这就需要我们配置去耦电容。
我们采用在大电容和小电容并联的方法来实现电源电路的去耦设计。
其原理是通过电容的等效电感值的减小,将频率较高的不需要的电流通过小电容短接到地,这时所起的作用也称电源高频干扰退耦。
本文的电路图中,通过设计一个1~10μF的大电容来使得低频噪声被过滤,同时再并联一个大小为0.01~0.1μF的小电容来使得高频噪声被过滤,通过这样相差两个数量级的电容来实现预期的功能。
双电动机驱动伺服系统的动力学建模及齿隙非线性仿真分析

双电动机驱动伺服系统的动力学建模及齿隙非线性仿真分析骆骁;杨武森【摘要】The dynamic model of dual-motor drive servo system was built, the nonlinear system of gear backlash was transformed to no backlash linear system. Dynamic model of dual-motor synchronous linkage servo system was established, through MATLAB simulation and analysis, got rotation curve and torque curve of gear output under the condition with backlash, verified the superiority of dual-motor drive servo system.%建立双电动机驱动伺服系统的动力学模型,将齿隙的非线性系统转化为一个近似无齿隙的线性系统.建立双电动机同步联动伺服系统的动力学模型,通过Matlab仿真分析,得到含齿隙条件下的齿轮输出转角曲线和转矩曲线,验证了双电动机驱动伺服系统的优越性.【期刊名称】《新技术新工艺》【年(卷),期】2013(000)001【总页数】4页(P106-109)【关键词】伺服系统;动力学建模;非线性;仿真分析【作者】骆骁;杨武森【作者单位】上汽通用五菱汽车股份有限公司,广西柳州545007;上汽通用五菱汽车股份有限公司,广西柳州545007【正文语种】中文【中图分类】TG47双电动机同步联动伺服系统的结构简图如图1所示,其中ωc1、ωc2是2个驱动齿轮的角速度,Jc1、Jc2是2个驱动齿轮的转动惯量,ω1、ω2是2个驱动电动机的角速度,U1、U2是2个驱动电动机的电枢电压,ωm是大齿圈的角速度,Jm是大齿圈的转动惯量。
步进电机调速系统的建模与仿真

步进电机调速系统的建模与仿真步进电机调速系统的建模与仿真步进电机调速系统是一种常见的工业控制系统,它通常用于控制电机的转速和位置。
本文将按照步骤思考的方式,介绍步进电机调速系统的建模与仿真方法。
1. 确定系统需求和参数在开始建模之前,我们首先需要确定步进电机调速系统的需求和参数。
例如,我们需要知道电机的额定转速、最大转矩以及负载的惯性等。
这些参数将对系统的建模和仿真过程产生重要影响。
2. 绘制系统框图根据步进电机调速系统的工作原理,我们可以绘制出系统的框图。
框图是由各个组成部分和它们之间的关系组成的图形,有助于我们理清系统的功能和信号流动。
在步进电机调速系统中,通常包括电机、驱动器、编码器和控制器等组件。
3. 建立数学模型在建模过程中,我们需要将系统转化为数学模型。
对于步进电机调速系统,可以采用转子惯性、电机动力学方程和电机驱动器的特性等来建立数学模型。
根据这些模型,我们可以得到系统的状态方程和输出方程。
4. 设计控制策略设计控制策略是步进电机调速系统建模的重要一步。
根据系统的需求和数学模型,我们可以选择适合的控制策略。
常见的控制策略包括比例积分控制(PID)和模糊控制等。
选择合适的控制策略可以提高系统的稳定性和性能。
5. 进行仿真分析完成步进电机调速系统的建模和控制策略设计后,我们可以进行仿真分析。
使用仿真软件,我们可以将系统的数学模型输入,并模拟系统的运行情况。
通过仿真分析,我们可以评估系统的性能,例如转速响应、位置控制精度等。
6. 优化和调试在仿真分析过程中,我们可能会发现系统存在一些问题,例如过大的超调、不稳定等。
这时,我们需要进行优化和调试,尝试调整控制策略的参数,以改善系统的性能。
通过多次优化和调试,最终得到满足系统需求的步进电机调速系统。
总结通过以上步骤,我们可以建立步进电机调速系统的数学模型,并进行仿真分析。
这种建模与仿真的方法可以帮助我们更好地了解步进电机调速系统的工作原理和性能,为实际系统的设计和控制提供参考。
基于MATLABSIMULINK的混合动态模拟线性步进电机
基于MATLAB/SIMULINK的混合动态模拟线性步进电机Szabó Loránd1 – Ioan-Adrian Viorel2 – Józsa János3摘要:直线电机的主要优点是,他们不把电能转换为旋转运动,而直接转换为线性运动。
发动机的电枢负载直接耦合,提供了另外几个优势的性能,高速度,高精度,无隙,高刚度,快速响应和时间稳定。
在这种情况下,它是对新型的高性能混合线性直接驱动步进电机的模块化的一种研究。
用MATLAB / Simulink ®环境对计算机模拟得到的结果仿真,并对电机的配置进行研究。
1.引言线性电机由旋转音圈电机和负荷直接刚性连接的。
不用的有滚珠、齿轮、皮带、和滑轮。
所有这些创造出优势是简单、高效、定位精度。
特别是加速度,可以显著的从这些旋转的直线运动发动机和传统的转换发动机比较中看出。
通过一些众所周知的文献和广泛的利用中也发现了线性步进电动机的一些缺点。
在任何一个位置原动机中的一个极都会引起很大的破坏力,减少了切向力。
这种方式,其总体的效率是降低了。
此外磁通量通过原动机和在两个电枢之间两极的滚筒通过引起了很强的法向力之间的吸引力。
最大的法向力是上述两个相同电极发生破坏力所产生的。
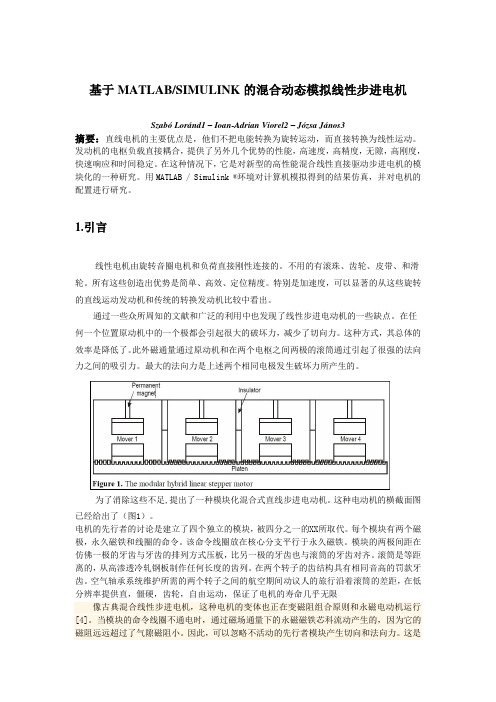
为了消除这些不足,提出了一种模块化混合式直线步进电动机。
这种电动机的横截面图已经给出了(图1)。
电机的先行者的讨论是建立了四个独立的模块,被四分之一的XX所取代。
每个模块有两个磁极,永久磁铁和线圈的命令。
该命令线圈放在核心分支平行于永久磁铁。
模块的两极间距在仿佛一极的牙齿与牙齿的排列方式压板,比另一极的牙齿也与滚筒的牙齿对齐。
滚筒是等距离的,从高渗透冷轧钢板制作任何长度的齿列。
在两个转子的齿结构具有相同音高的罚款牙齿。
空气轴承系统维护所需的两个转子之间的航空期间动议人的旅行沿着滚筒的差距,在低分辨率提供直,僵硬,齿轮,自由运动,保证了电机的寿命几乎无限像古典混合线性步进电机,这种电机的变体也正在变磁阻组合原则和永磁电动机运行[4]。
两相异步电机的数学模型及动态特性仿真

两相异步电机的数学模型及动态特性仿真汪敏【摘要】通过对两相异步电机绕组结构的分析,在理想化假设的情况下推导了两相电机的电磁关系,建立了电机在任意速旋转坐标系dqn下的通用数学模型,并在分析电机数学模型的基础上,应用搭建模块法建立了Matlab/Simulink软件环境下两相异步电机的动态模型.并以实际应用中的小功率电机为例,对电机运行进行了仿真分析.对其启动后突加负载及带负载启动等多种瞬态过程进行了仿真计算.仿真结果表明应用此数学模型对电机运行过程进行仿真具有较高的精度、较好的通用性等优点,具有一定的实用价值.【期刊名称】《三峡大学学报(自然科学版)》【年(卷),期】2016(038)002【总页数】5页(P75-78,96)【关键词】两相异步电机;dq变换;Simulink仿真【作者】汪敏【作者单位】江汉大学数学与计算机科学学院,武汉 430056【正文语种】中文【中图分类】TM343小功率单相异步电机在家用电器和工农业生产中获得了广泛应用[1-3],如水泵、空调、洗衣机等设备所采用的单相异步电机结构具有结构简单、控制方便、运行可靠等优点.小功率异步电机很多场合都希望能调节速度,比如空调用电机运行于高精度温度调节、洗衣机运行于洗衣或者甩干模式时,都希望电机能在很宽的范围内调节速度,同时又希望电机的输出转矩不要出现太大的波动,很显然单相电机偏软的机械特性已不能满足实际需求,由于单相电机只有一个主绕组,通电后所产生的磁场是脉振磁场,不是旋转磁场,不能使鼠笼式转子产生启动转矩.因此一般利用电容启动的单相异步电机都设置了一个在空间上与主绕组相差90°电角度的副绕组,利用交流电路中电容的电流超前电压90°相角这一原理产生旋转磁场.单相异步电机的这种结构导致调速控制方法受到很大的限制,实际控制中一般采用较为简单的调压或调频的方式,其转速调节密度较低,导致效率低、经济性差;在实行变频调速时,频率变化将导致电机内部磁场由圆形变成椭圆,造成转子转矩波动,电机运行效率降低,不能满足家电和工业用电机不断增长的性能需求[4-6].而采用对称绕组的两相异步电机则可以解决以上这些问题,两相异步电机内部有两个主绕组,可用变频器输出对称两相电压来直接驱动,因此可以实现精确、灵活而连续的速度控制,并且运行非常平稳.随着电力电子技术、微处理器及现代控制技术的发展,实现两相异步电机的变频调速系统非常方便,同时具有结构简单、运行可靠、调速性能好、工作寿命长等优点.既可以获得和三相异步电机相近的动态性能,结构又相对简单.两相异步电机绕组由定子绕组和转子绕组两部分构成,定子绕组采用相差90°电角度的结构,转子绕组采用鼠笼式结构.两相异步电机是一个高阶、强耦合、非线性的多变量系统,其基本结构如图1所示,由理想化电机的假设可以推导出两相异步电机的绕组电感.异步电机的基本模型参数计算中,对于p对极电机x相绕组和y相绕组电感系数lxy的一般化计算公式为[2]:式中,Λg为气隙磁导,Nx,Ny分别为x绕组和y绕组的匝数,αxy为x绕组和y绕组轴线的夹角.由绕组之间电感表达式(1)可以计算出定子主电感和转子主电感分别为)/(4p),定子绕组之间的互感、转子绕组之间的互感均为零.令ls=lσs+lms、lr=lσr+lmr(lσs、lσr分别为定子和转子每相绕组漏电感)可得定转子绕组电感矩阵分别为:定、转子绕组之间的互感矩阵为:式中,θr为定、转子绕组之间夹角.可以看出两相异步电机与三相异步电机的数学模型的区别在于两相电机定子绕组两相之间和转子绕组两相之间互感为零,消除了耦合.建立旋转坐标系如图2所示[2],从相坐标系到dq坐标系的变换矩阵为:式中,α为d轴与定(转)子A(a)相绕组轴线之间的夹角.由旋转变换得dq坐标系中的磁链方程为:式中,ψdqs、ψdqr为dq系统中定、转子磁链矩阵;Idqs、Idqr为dq系统中定、转子电流矩阵;为Lsr的转置矩阵.工作原理即异步电机定子绕组通入相差90°的正弦交流电,即可产生旋转的气隙磁场,旋转磁场切割转子即可在转子上产生感应电势和感应电流,转子感应电流与旋转磁场相互作用产生电磁转矩从而驱动电机转动.由此可知两相异步电机和三相异步电机有相同的数学模型及解耦表达式,理论上具有相似的动态特性.但两相异步电机只需两相供电,驱动控制电路相对简单,只是功率密度稍低.根据参照系理论,采用旋转变换并令ω=0即可得出在静止参照系中的状态方程为:式中,uαs、uβs、uαr、uβr为αβ系统中定子、转子相电压,rs、rr为定、转子绕组电阻,为αβ坐标系旋转角速度,ωr为转子电角速度,Δω=ω-ωr,p为微分算子.忽略电机内部的铁磁损耗及磁饱和等因素可以简化电机模型,在静止坐标系中以定子电流和磁链作为状态变量建立两相鼠笼式异步电机的动态数学模型,由式(6)中的数学模型[7-8]得两相异步电机在αβ静止坐标系下的表达式:电磁转矩和转子运动方程为:式中,Te、TL为电磁转矩、负载转矩;np为电机极对数;J为转子转动惯量.可以在Simulink中利用丰富的模型库建立两相鼠笼式异步电机的数学模型,将电机模型分解为独立的子模块,由式(7)(8)建立定子侧α轴电流、磁链仿真子系统如图3所示,类似地可以建立定子侧β轴电流、磁链仿真模块、转子侧α轴电流、磁链仿真模块和转子侧β轴的电流、磁链仿真模块如图4~6所示.根据两相异步电机数学模型中的电磁转矩方程式(9)(10),可建立电机电磁转矩及转子运动仿真子系统如图7所示,图中Te为电机输出转矩,TL为负载转矩.由两相异步电机的数学模型和Simulink信号流图,可以建立两相异步电机的仿真模型如图8所示.根据图8在Simulink环境下建立两相异步电机的数学模型,选取工业小型电机作为仿真对象,参数为:功率1.1 kW,相电压220 V,频率50 Hz,极对数np=2,定子转子电阻rs=4.67 Ω,rr=4.85 Ω,定转子电感ls=lr=0.65 H,互感lm=0.63 H,转动惯量J=0.02 kg·m2.定子电压sin(ωt-π/2),仿真结果如下.1) 空载启动,在0.5~0.6 s时间段加上6 N·m负载,定子A相电流、电磁转矩Te、转子转速ω如图9所示.空载启动时,起动过程冲击电流较大,幅值可达额定值的4倍,电机转速在0.3 s左右上升到额定值,0.5~0.6 s加上负载时电机转速开始下降,电磁转矩迅速上升,具备很强的转矩跟踪能力,负载波动造成的影响能很快消除,转速下降幅度很小,并能很快恢复到稳定值.这主要是由于电机具备较大的惯性,稳定运行时态已存储一定的电磁能和机械能,因此负载突变造成的影响不明显.2)电机带负载启动,负载转矩为6 N·m,a相电流、电磁转矩Te、转子转速ω仿真结果如图10所示.带负载启动时电机冲击电流比较大,和空载启动时相比电流持续时间和转速上升到稳定值的时间都相对有所延长,大概需要0.4 s左右,有转矩扰动时,两相异步电机只需0.2 s左右就能达到新的稳态.在启动转矩波动及稳定性方面有很大提升.仿真结果验证了模型的有效性,由于两相异步电机的定子磁链轨迹接近圆形,启动转矩大,转速上升快,消除了单相异步电机中脉动磁场缺陷而导致的较大幅度的转矩脉动,运行更加平稳,理论上稳态运行可以保证机械转矩恒定;同时两相结构和单相相比,具有较大的空间利用率,可以获得更大的功率密度,因此可以获得较强的带载能力,带负载启动时,电流和转矩脉动较小;稳态运行时,抗干扰能力也很强.目前单相异步电机的控制主要通过控制电磁转矩和磁链来实现,将转矩和磁链经坐标变换后等效为直流电机进行控制.由于主副绕组匝数的不对称性,磁链矢量不能以固定幅值旋转,使电机内部磁场为椭圆型磁场而非圆形磁场,因此单相异步电机运行中转矩脉动较大.而采用两相模型的异步电机系统,很好地消除了磁场脉振、转矩脉动过大等问题,由数学模型可知两相结构内部磁场为圆形磁场,稳态运行没有转矩脉动,采用两相结构的电机模型具有良好的运行稳态性能,控制精度高,实用性较好.介绍了两相异步电机矢量变换的数学模型,并在Simulink环境下建立了电机的数学模型并完成了仿真分析,采用该两相异步电机的仿真模型,可以十分便捷地对两相电机的启动性能进行了分析和仿真,得出该交流电机的转矩、转速等运行曲线,波形符合理论分析.仿真结果表明两相异步电机具有较好的静态、动态性能,同时两相异步电机驱动系统可由变频器直接产生对称两相电压,直接驱动两相绕组,采用对称绕组的两相异步电机和三相异步电机相比,结构相对简单,却能够获得和三相异步电机相近的动态性能.两相异步电机可以克服单相电机转矩脉动的情况,在功率较大的情况下有明显的优势,可应用在空调、水泵等设备上,能在满足性能要求的前提下降低系统成本.【相关文献】[1] 傅海涛,杨长安.两相异步电机的动态特性仿真[J].中小型电机,2005,32(4):10-13.[2] 辜承林.机电动力系统分析[M].武汉:华中科技大学出版社,1998.[3] 顾德英,季正东,张平.基于Simulink的异步电机的建模与仿真[J].电力系统及其自动化学报,2003,15(2):71-73.[4] Yu X,Dunnigan M W,Williams B W.A novel rotor resistance identification method for an indirect rotor flux orientated controlled induction machine system[J]. IEEE. Transactions on Power Electronics,2002,17(3):353-364.[5] Avdiu N Z. Modeling of the induction motor with two sets of three phase windings in the stator and squirrel cage rotor. IECON 2012-38th Annual Conference on IEEE Industrial Electronics Society[J]. IEEE Conference Publications, 2012 , 1900-1907.[6] 杨祖泉,姚绪梁,舒小芳.异步电动机直接转矩控制系统的仿真研究[J].电机与控制学报,2004,8(4):329-332.[7] 周力求,等.基于MATLAB/SIMULINK的异步电动机建模与仿真[J].电机电器技术,2003(4):32-35.[8] Jezernik K. Robust Induction Motor Control for Electric Vehicles. Advanced Motion Control[C]. Tsu-City, Japan:1996. AMC '96-MIE. Proceedings.。
【设计】两相混合式步进电动机驱动控制系统设计毕业论文

【关键字】设计毕业论文(设计)2010届电气工程及其自动化专业班级题目两相混合式步进电动机驱动控制系统设计姓名学号指导教师职称二О一二年五月二十五日摘要本文源于解决步进电动机的失步问题。
论文在了解步进电动机的特点及工作原理的基础上,重点研究两相步进电动机的单片机控制技术。
根据两相混合式步进电动机的驱动控制特点,本文采用了双极性驱动方式,通过脉冲分配合理控制绕组中的电流保证步进电动机内部合成磁场的幅值恒定,合成磁场的角度均匀,并在此基础上设计了一种两相混合式步进电动机驱动器。
该驱动器以单片机8098为控制核心,选用PBL3717、H桥驱动器件等构成驱动电路,论文从驱动技术方案、硬件电路、控制软件设计方面进行了详细地描述。
在反馈检测电路设计时,采用光电编码器来进行步进电动机的转速。
通过8279扩展键盘显示电路来显示电动机的转速和给定速度;另外利用ISD1420语音芯片实现语音报速功能。
最后对所设计的两相混合式步进电动机驱动器进行了性能测试分析,结果表明:该驱动器达到了系统设计前所提出的各项指标。
系统运行安全、可靠、稳定。
整个系统电路简单实用、性能优良、通用性强。
设计原则适用于各种步进电动机,有一定的实用价值。
关键词:2相混合式步进电动机,非线性动态模型,单片机,细分控制AbstractThis dissertation is about a fundamental research that solve the problem of desynchronizing, Based on the characteristics and the work principle of stepping motor, the paper emphasizes the control technology of stepping motor which controlled by the 8098 SCM.According to the character, the paper uses dual bridge driving control technology. Through analyzing and establishing the subdivision model, this paper controls the winding current reasonably, and guarantees constant magnetic field value, even angle.A new driver for 2-phase stepping motor is designed.The driver takes single chip 8098 as the control core, selects BPL3717 and H-bridge as the driver circuit. The paper discusses the technology of driver, the hardware and software designing in detail .In order to design the feedback of the current and speed of 2-phase hybrid stepping motor, using speed monitor to detect the speed of stepping motor. At the same time, using key- board to input the speed and output by LED, which is taken by chip 8279.In the other way, we use pronunciation chip ISD1420 to report the current steep.At last, a whole test for driver is made. The experiment result indicates that this driver reaches the qualities required. The system runs smoothly and safety. The circuit is simple, and has a good performance. The design principle fits many kinds of stepping motor, and has a good practical value.Key Words: 2-phase hybrid stepping motor, Nonlinear dynamic model Single chip,Subdivision control目录绪论 (1)1.1课题研究背景及主要内容............... 错误!未定义书签。
基于单片机和FPGA的两相混合式步进电机控制系统设计

摘要步进电机是一种将电脉冲信号转换成相应的角位移或线位移的机电元件,具有易于开环控制、无积累误差等优点,因此广泛应用于工业、办公自动化等领域。
本文以两相混合式步进电机作为研究对象,分析了步进电机的工作原理并建立了步进电机的数学模型。
在控制器的选择方面,本文综合考虑了不同控制器的优缺点。
由于单片机技术成熟,并且编程简单,价格低廉;FPGA 性能优越,集成度高,并且无需A/D转换芯片,最终采用单片机和FPGA作为控制芯片。
单片机主要实现了步进电机调速控制、转向以及细分数的设定,而FPGA主要实现了对步进电机的细分驱动。
最后,本文给出了设计的最终方案。
本设计结合了简单廉价的单片机和高性能的FPGA,在很大程度上提高了步进电机的低频和高频性能,有很高的实用价值。
关键词步进电机FPGA 单片机AbstractStepping motor is a kind of mechanical electronic components driving electric pulse signal into corresponding angular displacement or line displacement. Because of having the advantage of easy to open-loop control and no accumulated error, etc., stepping motor is widely applied to the industry, office automation, etc. This paper is based on the two-phase hybrid stepping motor, analyses the working principle of stepping motor and establishes the mathematical model of stepping motor. In the choice of controller, this paper considers the advantages and disadvantages of different controller synthetically. The technology of MCU is mature, the program is easy, and the price is cheap; FPGA has superior performance, high integration level, and no A/D transformation chip. So finally I picks the MCU and FPGA as the control chip. MCU mainly realizes the stepping motor speed regulation control, steering and subdividing number settings, while FPGA mainly realizes the subdivision drive of stepping motor. Finally, this paper gives the final design of the project. This design combined the simple and inexpensive MCU with the high performance FPGA, and improved the low frequency and high frequency performance of stepping motor. It has high practical value.Key words Stepping motor FPGA Chip microcomputer目录摘要 (I)Abstract (II)第1章绪论 (1)1.1步进电机研究背景 (1)1.2 步进电机发展现状 (1)1.3 设计目的 (2)1.4 设计意义 (3)1.5 论文内容 (4)第2章两相混合式步进电机 (4)2.1 两相混合式步进电机简介 (4)2.2 混合式步进电机的技术指标 (4)2.2.1 静态参数 (5)2.2.2 动态参数 (5)2.3 两相混合式步进电机结构及原理 (6)2.4 两相混合式步进电机的数学模型 (8)2.4.1 电感和磁链的推导 (8)2.4.2转矩与运动方程的建立 (14)2.5 本章小结 (15)第3章整体设计方案 (16)3.1 控制器的选择 (16)3.2单片机控制电路设计 (18)3.2.1单片机选型 (18)3.2.2 时钟电路设计 (19)3.2.3 复位电路 (20)3.3 FPGA细分驱动电路 (21)3.3.1 FPGA选型 (21)3.3.2 VHDL语言介绍 (22)3.3.3 VHDL语言设计过程 (23)3.3.4 Quartus II软件 (23)3.3.5 细分驱动电路设计 (24)3.4 本章小结 (30)第4章软硬件设计 (31)4.1硬件设计 (31)4.1.1 硬件设计注意事项 (31)4.1.2 PCB板设计 (31)4.2 软件设计 (34)4.2.1 单片机部分软件结构 (34)4.2.2 FPGA部分软件结构 (36)4.3 本章小结 (37)结论 (38)致谢 (39)参考文献 (40)第1章绪论1.1 步进电机研究背景步进电机是一种感应电机,它可以将电脉冲转化为角位移的执行机构。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Abstract:In order to improving control perform ance of two-phase hybrid stepping motor,its modeling was set up by
one of fuzzy control parameter on-line adjusting control tactic.It was based on logical predigesting and linear disposing,
combine advanced fuzzy control theory and PID control tactic w ere adopted,fuzzy control has better adaptability on—line
adjusting control parameter was applied to PID parameter real—time adjusting.Modeling and simulation under M atlab
·48 ·
兵 工 自 动 化 Ordnance Industry ห้องสมุดไป่ตู้utom ation
2016一O2
35(2)
两相 混合 式步进 电机建 模 与仿真
余 驰 ,李健 仁 ,张 刚峰
(庆 安集 团有 限公司 航空 设备 研 究所 ,西 安 710077)
摘要 :为提 升两 相 混合 式步 进 电机 的控 制性 能 ,建立 一 种基 于模 糊控 制在 线参 数 调节 控制 策 略的 两相 混合 式步 进 电机 数 学模 型 。在合 理简 化和 线性 化 处理 的基 础上 ,采 用先 进 的模 糊控制 理 论和 PID 控 制 结合 的控 制策 略 ,将模 糊 控制 对 环境 的适 应性 强 ,可 在线 调整 控制 参 数应用 于对 PID参 数 的实 时调节 。在 Matlab仿 真环 境下 进行 建模 与 仿 真 ,对 比分析 了常 规 PID 与模 糊 PID 控制 的仿 真特 性 。仿 真结 果表 明:在不 同响应 和精度 要 求 的两相 混合 式步 进 电 机 控 制系 统 中 ,通 过模 糊 参数 在线 调节 控制 比常 规参 数 PID 控 制可 以达 到 更优 的技 术指 标 ,实现 了对 两相 混合 式 步 进 电 机 的 快 速 精 确 控 制 。
environm ent w as set up,sim ulation characteristic of general PID and fuzzy PID w as analyzed.Sim ulation of result show,
with different response an precision in two—phase hybrid stepping motor control system.fuzzy parameter on·line adjusting
could be realized better technical index,it was realized fast precision control in two—phase hybrid stepping m otor. K eyw ords:hybrid stepping m otor;PID control;fuzzy control;m odeling and sim ulation
O 引 言
步进 电机 又称 脉 冲 电机 或 阶 跃 电机 。接 收 脉 冲 信 号 通 过 励 磁 状 态 的 改 变 ,实 现 对 应 角 度 执 行 的机 电元 件 。具 有 易 于 实 现 数 字 控 制 、步 距 角误 差 不 累 积 、 在 相 当宽 的范 围 内调 速 平 滑 、 自锁 能 力好 等 优 点 】。步 进 电机 在 机 器 人 、液 压 数 字 阀 、 多维 伺 服 转 台 、航 空 白适 应 机 翼驱 动 系统 、 数 控 机 床 等 方 面 已有 广 泛 的应 用 ]。可 根 据 具 体 的 使 用 需 求 进 行 开 环 或 闭环 控 制 工程 应 用 。步 进 电机 按 照 结 构 形 式 可 分 为永 磁 式 步进 电机 (PM 型)、混合 式 步 进 电机 (HB 型)和 反 应 式 步 进 电机 (VR 型 )。永 磁 式 步 进 电机 的 转 矩 和 体 积 较 小 、成 本 较 低 、分 辨 率 较 低 、步 距 角 较 大 一 般 在 7.5。~ 15。,适 合 应 用 在 负 载 较 小 、精 度 较 低 的 控 制 系 统 中 。反 应 式 步 进 电机 转 矩 较 大 ,但 噪 声 和 振 动 过 大 ; 因此 ,在 20世 纪 80年 代 就 已经 被 一 些 发 达 国家 淘 汰 。 混 合 式 步进 电机 综 合 了永 磁 式 和 反 应 式 电机 的优 点 , 具 有 分 辨 率 高 、转 矩 较 大 和 调 速 平 滑 的特 点 ,适 合 应 用 在 高 精 度 的机 电伺 服
关键 词 :混 合式 步进 电机 ;PID控 制 ;模糊 控制 ;建模 与仿 真 中 图 分 类 号 : TP273 文 献 标 志 码 :A
M odeling and Simulation of Tw o—phase Hybrid Stepping M otor
Yu Chi,Li Jianren,Zhang Gangfeng viation Equipment Institute,Qing’an Group CD., td,,Xi’an 710077,China)
控制 系统中,是 目前应用最广泛的步进 电机 。
基 于 此 ,笔 者 以广 泛 应 用 的两 相 混 合 式 步 进 电 机 为 对 象 ,在 建 立 数 学 模 型 的基 础 上 , 为 了适 应 快 速 响 应 和 高 精 度 的跟 踪 使 用 要 求 和 发展 需求 ,将 步 进 电机 伺 服 控 制 与 调 试 的经 验 ,通 过运 用 模 糊 控 制 在 线 参 数 调 节 的控 制 策 略施 加 于 两 相 混 合 式 步 进 电 机 的控 制 ,以提 升 两 相 混 合 式 步 进 电机 的控 制 性 能 。