px4飞控调试方法
PX4飞控使用手册-第四章:PX4的script以及七七八八
APM for PX4飞控使用手册第四章:PX4的script以及七七八八——sw笨笨总结1.前言感谢老天让我知道这样一款飞控,并给了我宝贵的两周闲时间专心鼓丘。
感谢PX4原作者的精心设计,虽然我不喜欢他的硬件。
感谢APM提供了成熟的固件,虽然我已经回归PX4固件。
感谢急速捕风将这样的硬件制作完毕完成硬件调试,然后卖到我手里。
作为一个航模爱好者,在我还没拿到这款飞控之前就有这么多人慷慨的给予了我帮助,我要再次感谢他们。
——sw笨笨2.为什么回归——强大的script功能a)什么是script?你需要定制你的飞控功能么?它可以实现。
从传感器,到接口,从存储到串口。
注意:script是在刚刚启动就介入了,改变了硬件的功能,所以只能在PX4原版固件下使用script,APM for PX4会消化不良死在那里。
b)Script在哪里?编写一个“rc.txt”文本文件,放在PX4上面TF卡的“etc”目录下。
就这样,无需其他工作和设置。
这个文件格式正确,那么系统有限执行其中的设置,而忽略原有的设置。
如果这个文件有语句错误——死在这里没的说。
c)Script能做什么?●停止USB节省资源。
●设置和启动自驾基本模式。
●设置TF卡,PX4还是保守的称其为“microSD”。
●设置通讯协议,并启动。
●设置FMU板接口功能。
●启动传感器、GPS、姿态结算、姿态控制、航迹控制、光流、IO等等。
●启动串口输出并设置参数。
●启动信息记录。
●还有很多等待你自己挖掘。
d)Script怎么写●它就像DOS的“autoexec”一样容易,别告诉我你没玩儿过DOS,感觉我是个老古董。
●首先最好从官网下几个script文件来节省时间,并用作参考。
https://pixhawk.ethz.ch/px4/users/apps/auto_starting_apps●全文以“#!nsh”开头,并以“exit”结束。
●全文使用顺序执行的基本执行顺序,逐句进行。
px4调参参数

px4调参参数(实用版)目录1.PX4 的概述2.PX4 的调参方法3.PX4 的参数设置4.PX4 的调参工具5.PX4 调参的注意事项正文【PX4 的概述】PX4 是一款用于自动驾驶的感知算法框架,全称为“Perception eXtraction from 4 sensors”,即“从四个传感器中提取感知信息”。
PX4 由感知、定位、地图和控制四个模块组成,可以同时处理来自激光雷达、相机、IMU 和 GPS 等多传感器的数据。
PX4 广泛应用于自动驾驶车辆的感知和决策,其高性能和灵活性使其成为业界首选的感知算法框架。
【PX4 的调参方法】PX4 的参数设置可以通过两种方式进行:一种是手动修改配置文件,另一种是使用调参工具。
手动修改配置文件需要对 PX4 的参数有较深入的了解,而使用调参工具则相对简单,即使对 PX4 的参数不熟悉,也可以通过调参工具进行有效的设置。
【PX4 的参数设置】PX4 的参数设置主要包括以下几个方面:1.传感器参数:包括传感器的类型、采样率、范围等。
2.感知参数:包括感知的类型(如点云、图像等)、感知的范围、感知的精度等。
3.定位参数:包括定位的方式(如 GPS、IMU 等)、定位的精度等。
4.地图参数:包括地图的类型(如 2D 地图、3D 地图等)、地图的精度等。
5.控制参数:包括控制的方式(如 PID 控制、模型预测控制等)、控制的参数等。
【PX4 的调参工具】PX4 提供了一款名为“PX4 Visualization and Configuration”的调参工具,该工具可以直观地显示 PX4 的各个模块的参数设置,用户可以通过拖动滑块或者填写数值的方式进行参数设置。
同时,该工具还提供了参数的实时显示和模拟功能,方便用户进行参数的调试和优化。
【PX4 调参的注意事项】在进行 PX4 的调参时,需要注意以下几点:1.确保传感器的正常工作:在调参前,需要确保所有的传感器都已经正确连接,并且工作正常。
px4磁罗盘校准算法 -回复

px4磁罗盘校准算法-回复如何进行PX4磁罗盘校准。
第一步:背景介绍和准备工作(约200字)PX4是一种开源的自动驾驶飞行控制系统,其中磁罗盘传感器起着重要的作用。
磁罗盘主要用于测量地球磁场,以帮助飞行器在导航过程中确定自身的朝向。
然而,飞行器周围的磁场干扰或是硬件问题可能导致磁罗盘数据不准确,因此进行磁罗盘校准非常重要。
本文将详细介绍如何进行PX4磁罗盘校准,确保飞行器在飞行过程中能够准确的判断自身朝向。
在进行PX4磁罗盘校准之前,我们首先要做一些准备工作。
首先,确保你已经安装并配置好PX4飞控系统,并且接入了磁罗盘传感器。
其次,找到一个较为开阔的空旷地方,以避免周围的金属物体对罗盘校准的干扰。
最后,使用PX4固件提供的Ground Control Station(GCS)软件,例如QGroundControl,用于对飞行器进行校准操作。
第二步:启动PX4 GCS软件并进入校准模式(约200字)在准备工作完成后,启动PX4 GCS软件,连接到飞行器的飞控系统。
然后,在软件界面的顶部选择校准模式。
进入校准模式后,系统会要求进行几个不同类型的校准,包括陀螺仪、加速度计、磁罗盘等。
第三步:校准陀螺仪和加速度计(约300字)首先进行的是陀螺仪的校准。
校准陀螺仪的目的是确定飞行器的角速度测量的准确性。
在校准过程中,系统要求将飞行器放置在静止的平面上,以便测量出地球的重力加速度方向。
校准过程中,要确保飞行器平稳静止,避免任何震动或倾斜。
接下来,进行加速度计的校准。
加速度计的校准目的是确定飞行器的加速度测量的准确性。
校准过程中,系统要求将飞行器移动到不同的位置和方向,以便测量出地球的重力加速度在不同方向上的分量。
校准过程中,要确保飞行器在每个位置和方向上静止一段时间,以便传感器稳定并测量准确。
第四步:校准磁罗盘(约500字)在完成陀螺仪和加速度计的校准后,现在可以进行磁罗盘的校准了。
磁罗盘的校准过程相对较为复杂,需要保证正确的步骤和准确的动作。
Pixhawk(PX4)遥控器和加速度校准教程
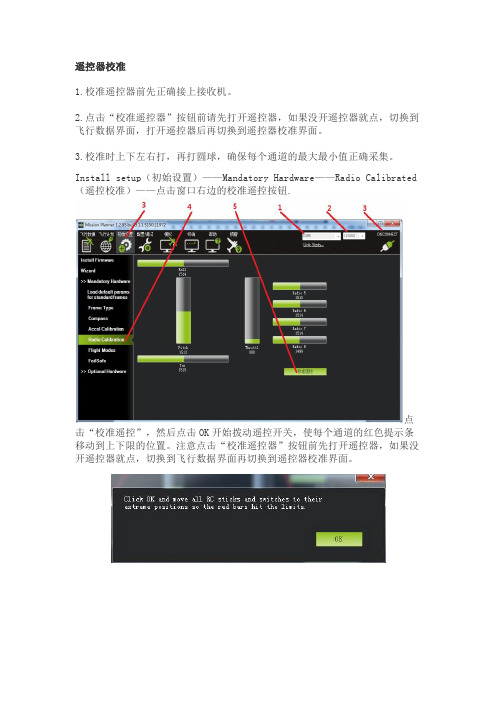
遥控器校准1.校准遥控器前先正确接上接收机。
2.点击“校准遥控器”按钮前请先打开遥控器,如果没开遥控器就点,切换到飞行数据界面,打开遥控器后再切换到遥控器校准界面。
3.校准时上下左右打,再打圆球,确保每个通道的最大最小值正确采集。
Install setup(初始设置)——Mandatory Hardware——Radio Calibrated (遥控校准)——点击窗口右边的校准遥控按钮.点击“校准遥控”,然后点击OK开始拨动遥控开关,使每个通道的红色提示条移动到上下限的位置。
注意点击“校准遥控器”按钮前先打开遥控器,如果没开遥控器就点,切换到飞行数据界面再切换到遥控器校准界面。
当每个通道的红色指示条移动到上下限位置的时候,点击Click when Done保存校准时候,弹出两个OK窗口后完成遥控器的校准。
如果你拨动摇杆时上面的指示条没有变化,请检查接收机连接是否正确,另外同时检查下每个通道是否对应.注意遥控各通道名称:附录:为什么要点击“校准遥控器”按钮前请打开遥控器?如果不这么做,可能会出现以下情况:例如油门的最小值实际比采集的飞控采集的要高,这样的校准结果是错的。
如何校准加速度飞控放平,箭头对向电脑屏幕,当点击“校准加速度”按钮时,飞控RGB灯会红蓝闪,这时我们不可以去移动飞控,等红蓝闪过后就会提示开始校准。
然后按照地面站提示,放置飞控水平,左,右,下,上。
例如地面站提示放平,飞控放平,点击键盘任意键或者地面站按钮。
飞控有箭头,校准前,飞控箭头对向电脑屏幕。
“LEVEL”,放平,一定要确保飞控所在位置是平的,这步很重要。
“LEFT” 飞控向左“RIGHT”飞控向右“DOWN”飞控箭头向下“UP”飞控箭头向上。
成功后提示“sucessful”,失败会提示"failed",失败一般是飞控没有准确放置方位。
成功后,飞控断电,重新连接。
连接后,飞控放平,点击“校准水平”校准加速度过程,每个方位放置的时候不要太快,最好间隔1秒左右再换下一个方位,也不能太久,太久会超时。
如何在PX4中配置遥控器和遥控器通道?

如何在PX4中配置遥控器和遥控器通道?
要在PX4中配置遥控器和遥控器通道,您可以按照以下步骤进行操作:
1. 连接遥控器:将遥控器通过接收机与飞行控制器连接。
确保遥控器和飞行控制器之间的连接是可靠的。
2. 启动飞行控制器:将飞行控制器连接到计算机上,并使用PX4固件启动。
3. 进入QGroundControl:打开QGroundControl地面站软件,并连接到飞行控制器。
4. 配置遥控器:在QGroundControl中,导航到“设置”>“遥控器”选项卡。
5. 校准遥控器:在遥控器设置选项卡中,选择“校准遥控器”按钮。
按照屏幕上的指示进行校准。
6. 配置通道:在遥控器设置选项卡中,您可以为每个通道分配特定的功能。
通过将每个通道与相应的控制选项关联,可以实现飞行器的各种操作。
7. 测试通道:在遥控器设置选项卡中,您可以使用“通道监视器”来测试每个通道的输入是否正确。
确保遥控器的输入与监视器中显示的通道值相匹配。
8. 保存并应用配置:完成遥控器和通道配置后,确保单击“保存”按钮以保存设置,并点击“应用”按钮以将配置应用于飞行控制器。
完成以上步骤后,您的遥控器和通道配置将在PX4中生效,并可以使用遥控器来操控飞行器。
2多旋翼无人机飞控调试技术_加载参数

二、加载参数
2.1、连接飞控到地面站软件
◆在PC设备管理器中查看当前飞控(PX4 FMU)使用的端口。
图示中是
COM3,不同PC可能有差异,需要自己查看。
图 2.1 设备管理器中查看端口
◆ Mission Planner中选择相应的端口,选择波特率为115200,然后点击“连接”。
图 2.2 端口设置和软件连接
2.2、加载参数
◆点开地面站软件的“配置/调试”菜单下的“全部参数表”。
图 2.3 全部参数表界面
◆点击右边的“加载”。
图 2.4 加载参数菜单
◆通过弹出的对话框,找到并打开“E360参数.param”文件。
图 2.5 默认参数
◆如果弹出提示,点击“OK”。
点击“Yes”
点击“Yes”
◆然后点击右边的“写入参数”。
图 2.6 写入参数菜单。
MCPIDTuningGuide·PX4UserGuide
MCPIDTuningGuide·PX4UserGuide多轴飞行器 PID 调参指南本教程介绍如何在 PX4 上调整多轴飞行器(四、六、八旋翼等) 的PID 参数。
通常, 如果您使用的是已经支持的机型(例如, QGroundControl 中的机身),则默认参数应足以安全地飞行。
为了获得最好的性能, 最好能整定新飞机的PID 参数。
例如, 不同的电调或电机需要不同的控制增益, 才能获得最佳飞行效果。
本指南仅适用于高级用户。
不合适的参数可能会导致飞行器不稳定,甚至炸机。
确保预先指定保护开关 ( Kill-switch ) 。
简介PX4 使用P 比例、 I 积分、 D 微分 (PID) 控制器, 是使用最广泛的控制技术。
The controllers are layered, which means a higher-level controller passes its results to a lower-level controller. The lowest-level controller is the the rate controller, then there is the attitude contoller, and then the velocity & position controller. The PID tuning needs to be done in the same order, starting with the rate controller, as it will affect all other controllers.前置条件•您已为您的飞行器选择了最接近的默认机型配置。
这应该可以让你的飞行器飞起来。
•您应该已经执行过电调(ESC)校准。
•PWM_MIN 正确设置。
它需要设置一个小值, 但当飞行器解锁时, 需要保证电机不停转。
可以在特技 Acro 模式或手动/自稳模式中进行测试:o卸下螺旋桨o解锁,并将油门杆拉到最低o把飞行器倾斜到各个方向, 大约60度o确保没有电机停转•可以通过SDLOG_PROFILE 参数,启用高速率日志记录配置文件, 以便使用日志来查看角速率和姿态跟踪性能 (之后可以禁用该选项) 。
px4调参参数
px4调参参数PX4是一款开源的无人机飞行控制器软件,广泛应用于各种无人机项目中。
调参是无人机使用中非常重要的一环,下面是一些关于PX4调参的参数和解释,希望对你有所帮助。
1、Roll/Pitch/Yaw Rate :这三个参数分别控制无人机的横滚、俯仰和偏航速率。
这些参数决定了无人机在空中的动态响应速度,如果设置得太高,无人机可能会过于敏感,导致难以控制;如果设置得太低,则可能导致无人机反应迟钝。
2、Thrust Scale :这个参数用于调整无人机的推力大小。
如果您的无人机有动力系统(例如,使用电动机),这个参数将影响无人机的起飞和降落速度。
3、Max Altitude :这个参数限制了无人机的最大高度。
设置一个合理的最大高度可以确保无人机的安全,防止其飞得过高或过低。
4、Min Altitude :这个参数设定了无人机的最低飞行高度。
确保无人机不会飞得太低,避免碰撞地面或其它障碍物。
5、Velocity Control :这个参数控制无人机的最大速度。
在速度控制模式下,无人机会根据设定的最大速度自动调整推力,以保持速度恒定。
6、Position Control :这个参数用于控制无人机的位置。
通过调整位置控制参数,您可以设置无人机的起飞和降落点,以及飞行轨迹。
7、Control Filter :这个参数用于控制无人机的稳定性。
通过调整控制滤波器的参数,您可以优化无人机的飞行性能和稳定性。
8、Barometer Calibration :这个参数用于校准气压计。
校准气压计可以提高无人机的定位精度和高度控制精度。
以上只是一部分重要的调参参数,实际上PX4还有很多其他参数可以调整,具体取决于您的应用场景和需求。
建议在进行任何调整之前都进行充分的研究和测试,以确保无人机的安全和性能。
px4 控制流程
PX4是一个开源的无人机飞行控制系统,它使用一种称为PX4Flow 的算法来控制无人机的飞行。
以下是PX4的控制流程:
1. 传感器读取:PX4通过传感器读取无人机的当前状态,包括位置、速度、姿态等。
2. 导航规划:根据无人机的目标位置和当前位置,PX4计算出无人机的导航路径。
3. 控制器设计:PX4使用一种称为PID控制器的算法来控制无人机的姿态和位置。
PID控制器是一种常用的反馈控制算法,通过调整无人机的输入信号来使其输出值与目标值一致。
4. 执行器控制:PX4将PID控制器的输出信号传递给无人机的执行器,如电机、舵机等,以控制无人机的运动。
5. 传感器融合:PX4使用传感器融合技术来提高无人机的定位精度和稳定性。
传感器融合是将多个传感器的数据进行综合处理,以提高其精度和可靠性。
6. 安全保护:PX4还具有安全保护功能,如避障、返航等,以确保无人机的安全飞行。
总之,PX4的控制流程包括传感器读取、导航规划、控制器设计、执行器控制、传感器融合和安全保护等方面,旨在实现无人机的稳定、精确和安全的飞行。
px4控制方法
px4控制方法
对于PX4控制方法,主要涉及姿态控制。
具体流程如下:
1. 外环产生角速率,内环产生期望加速度(电机推力)。
外环根据期望的位置、速度,计算输出相应的姿态信息。
2. 外环输出的姿态信息作为内环的输入,内环计算出期望的加速度。
3. 如果有三方向加速度(可用旋转矩阵进行变换)输入,则可以用于控制。
然而,PX4的setpoint_accel实际控制效果很差,建议参考阿木实验室的px4_command,使用attitude输出。
此外,在配置MNT_MODE_IN参数后重启飞控,释放出mount的设置参数控制信号输入为RC,则接收机必须连接对应的通道至AUX辅助通道,并通过MNT_MAN_*参数设置pitch/roll/yaw对应的AUX通道。
如果参数值为MAVLINK_ROI,则可以通过mavlink命令实现控制;如果参数值为AUTO,则控制方式取决于上一次控制的模式。
如需了解更多详情,建议咨询相关工程师或专家,以获得专业建议。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.双gps设置
2.BRD_SAFETYENABLE 0:禁用安全开关1:启用安全开关
3. 3.2这个界面是正常工作的界面,此时通过串口的数据是2进制数据,所以看到的是乱码
从Open com port之后就是乱码。
可以尝试在飞机刚复位时(就是点连接后),快速按Enter键3次以上,可能能够进入CLI 命令界面。
还有一种可能是编译时禁止了CLI,则不会出现CLI界面。
禁止后可以减少使用21K空间这个问题影响不大,可以不管它。
如果确实影响工作,也可以解决。
4.你发的文档我看了,对比3.3.2和3.2.1版本,确实是3.3.2才会发送这个信息。
3.2.1没有这个消息。
文档说“这个是地面站算出来的”是不对的。
这个消息是飞控发出的。
数学上就是磁场采样值方差超差。
它意味着磁场采样值变化太大(短时间),超过了一个预设的门限。
这最可能是磁场干扰问题。
也不排除某个磁场设备(一共有2个)有点问题。
最好是换一个飞控硬件及外部罗盘,在相同地点相同飞机的情况下比较测试一下,确定问题原因。
可以通过飞控日志及日志分析器定量评估这个问题。
可以把比较的日志发给我。
另外你可以尝试改变一下预设的门限值:对应飞控配置参数中的FS_EKF_THRESH
缺省是0.8,严格是0.6,宽松是1.0。
所以可以改为1.0,放宽门限。
如果改为1.0还报这个错可能需要认真查找原因了。
如果你们想用3.3.2版本最好对3.3.2做完整认真的评估测试,看都有一些什么问题,做到心中有数。
如果只是想在没有
GPS时禁止切换到定点模式(PosHold),避免问题。
我估计使用3.2.1修改应该也不难,具体我看一下代码。