《汽车车身控制系统》第5章汽车数据总线传输系统
汽车总线系统

汽车总线系统 具有实时性、 可靠性、可扩
展性等特点
汽车总线系统 可以降低汽车 电子系统的成 本提高汽车的 安全性和舒适
性。
汽车总线系统的应 用
控制汽车电子设备:通过总线系统控制汽车上的各种电子设备如发动机、变速箱、刹车 系统等。
数据传输:总线系统可以快速、准确地传输数据提高汽车电子设备的工作效率。
1980年代:CN总 线技术诞生用于 汽车电子控制系 统
1990年代:LIN 总线技术出现用 于汽车电子控制 系统的低成本解 决方案
2000年代: FlexRy总线技术 出现用于汽车电 子控制系统的高 速通信
2010年代:以太 网技术应用于汽 车电子控制系统 实现高速、实时、 可靠的通信
总线技术的发展: 从传统的CN总线到 更先进的FlexRy总 线
网络化:构建车 辆与车辆、车辆 与基础设施之间 的网络连接实现 信息共享和协同 控制
标准化:制定统 一的总线协议和 接口标准降低开 发成本和维护难 度
安全性:加强数 据加密和身份认 证确保车辆通信 和数据传输的安 全性
智能网ห้องสมุดไป่ตู้汽车:汽车总线系统将实现车 辆与车辆、车辆与基础设施、车辆与云 端的互联互通提高驾驶安全性和舒适性。
网络架构的发展: 从传统的分布式网 络架构到更先进的 集中式网络架构
安全性能的发展: 从传统的被动安全 到更先进的主动安 全
智能化的发展:从 传统的手动操作到 更先进的自动驾驶 技术
智能化:汽车总线系统将更加智能化实现车辆与外界的实时交互 安全性:汽车总线系统将更加注重安全性提高车辆的安全系数 节能环保:汽车总线系统将更加注重节能环保降低车辆的能耗和排放 集成化:汽车总线系统将更加集成化实现车辆各个系统的高效协同工作
车身控制系统-总线系统

班级:姓名:学号:评定:
班级:
姓名: 学号: 评定:
学习项目单
班级:
姓名: 学号: 评定:
)CAN-H对正极短路工作模式下CAN波形图采集与绘制(注意周期、幅值标注))CAN-H与CAN-L互短模式下CAN波形图采集与绘制(注意周期、幅值标注)
)CAN-L对地短路工作模式下CAN波形图采集与绘制(注意周期、幅值标注))CAN-L对正极短路工作模式下CAN波形图采集与绘制(注意周期、幅值标注)
3.LIN线正常工作模式下波形图采集与绘制(注意周期、幅值标注)
线工作模式下波形图采集与绘制(注意周期、幅值标注)
学习项目单
班级:
姓名: 学号: 评定:。
汽车车载网络技术详解(修订版)习题库答案
汽车车载网络技术详解(修订版)习题库第一章车载网络系统基础知识 (1)第二章CAN总线传输系统 (4)第三章子总线系统 (7)第四章网关与诊断总线 (9)第五章光学总线系统 (10)第六章以太网与FlexRay总线 (13)第七章大众奥迪车系车载网络系统 (15)第八章丰田多路通信系统 (16)第九章通用车系车载网络系统 (18)第十章汽车车载网络系统检修 (19)第十一章车联网 (20)第一章车载网络系统基础知识一、填空题1.导线长度和插接器数量的增加不但占据车内的有效空间、增加装配和维修的难度、提高整车成本,而且妨碍整车可靠性的提高。
2.车载电控系统经历了中央电脑集中控制、多电脑分散控制和网络控制三个阶段。
3.数据传输总线,就是指在一条数据线上传递的信号可以被多个系统共享,从而最大限度地提高系统整体效率,充分利用有限的资源。
4.通过接口连接不同设备时有点对点连接和多点连接两种连接方式。
5.如果将传输路径的控制功能主要分配给其中一个设备,则该设备就变为主控控制单元,而其他设备仅具有副控功能,因而,具有副控功能的这些设备亦称从属控制单元。
6.协议三要素是指语法、语义和定时规则。
7.总线上的比特编码(比特表示)可以通过非归零法(NRZ)、曼彻斯特法和脉冲宽度调制法(PWM)实现。
8.车用网络大致可以分为4个系统:动力传动系统、车身系统、安全系统、信息系统。
二、选择题1.以下(A )不是车载网络系统组成。
A.传输媒体B.拓扑结构C.通信协议D.数据总线2.通过一个转发器将每台入网计算机接入网络,每台转发器与相邻两台转发器用物理链路相连,此为(A )。
A.环形网拓扑结构B.星形网拓扑结构C.总线形网拓扑结构D.三角形网拓扑结构3.以一台称之为中心处理机为主组成的网络,各种类型的入网机均与该中心处理机有物理链路直接相连,此为( B )。
A.环形网拓扑结构B.星形网拓扑结构C.总线形网拓扑结构D.三角形网拓扑结构4.将所有的入网计算机通过分接头接入一条载波传输线上,此为(C )。
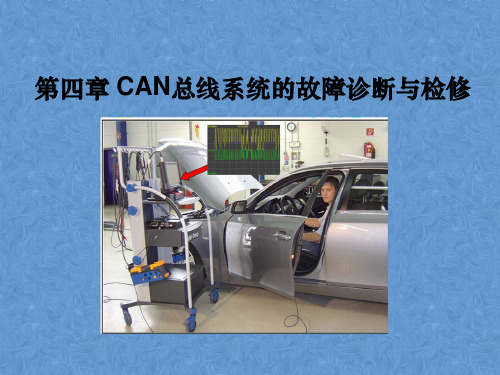
汽车车身电控系统检修-CANBUS总线系统结构及传输原理

CAN-BUS总线系统结构及传输原理
一、CAN-BUS总线系统的结构
(4)数据总线 CAN数据总线是用于传输数据的双向数据线,分为CAN高位(CAN-High)线和 CAN低位(CAN-Low)数据线。数据没有指定接收器,数据通过数据总线发送给各 控制单元,各控制单元接收后进行处理。
CAN-BUS总线系统结构及传输原理
一、CAN-BUS总线系统的结构
(4)数据总线 CAN数据总线采用两条线相互扭结成双绞线,两条线上的电位是相反的,如果一条 线的电压是5V,另一条线就是0V,两条线的电压总和等于常值。双绞线可以有效防 止对车辆内的其他设备产生电磁干扰,同时也可消除因为电压在CAN数据总线上快 速变换而产生的磁场干扰。
CAN-BUS总线系统结构及传输原理
一、CAN-BUS总线系统的结构
CAN-BUS数据总线的数据传输原理在很大 程度上类似电话会议的方式。一个用户 (控制单元)向网络中“说出”数据,而 其他用户“收听”到这些数据。若控制单 元认为这些数据对它有用,它就接收并且 应用这些数据,而其他控制单元也许不会 理会这些数据。故数据总线里的数据并没 有指定的接收者,而是被所有的控制单元 接收及计算。
CAN-BUS总线系统结构及传输原理
三、CAN-BUS数据总线的传输过程
数据的具体传输过程: ③ 接收数据。所有与CAN-BUS数据总 线相连构成网络的控制单元成为接收器, 从CAN-BUS数据总线上接收数据。 ④ 检查数据。控制单元对接收到的数据 进行检查,看是否是其功能所需。 ⑤ 接受数据。如果所接收的数据是需要 的,它将被认可及处理,反之将其忽略。
第五章can总线系统检修方法
对CAN进行测量时,例如:利用测试盒连接中央舒适电器控制单元,使用双通 道工作模式下进行检测。
两条CAN-BUS总线每一条线都通过一个通道进行测量。通过波形的分析可以很 容易地发现故障。由于需要单一的电压测量值,CAN的测量采用双通道测量是 必要的。CAN测量采用这形式的连接可以简单地判定“单线工作“ 故障。
当在车辆中存在电源电压过低状态时,同样也可能 (错误地) 记录为总线故障。 因此在分析总线故障之前应检查电源电压过低故障是否存储在超过两个控制单 元中。如果回答是肯定的就不用进行其他的总线故障分析了,而只在供电范围 内查询故障原因。
5).故障原因: CAN 总线上通信故障可能是下列原因: - .CAN Low 或 CAN High 通信线断路或者短路。 - .插头连接损坏 (触头损坏、污垢、锈蚀)。 - .车用电源系统中的故障电压 (例如由损坏的点火线圈或接地连接引起)。 - .某个控制单元中的通信部件故障。 - .某个控制单元的供电故障 (当蓄电池电量快耗尽时蓄电池电压缓慢下降可能 导致故障记录存储,因为不是所有的控制单元由于电压下降而同时关闭)。
3). 动力系统CAN-high对正极短路 CAN-high线的电压电位被置于12V.,CAN-Low线的隐性电压被置于大约12V.。 这是由于在控制单元的收发器内的CAN-high 和CAN-Low 的内部错接引起的。需 要将CAN线组(CAN-High 和 CAN-Low)从线节点处依次拔取,同时注意总线 的波形。当故障线组被取下后,的波形要恢复正常。
4.故障查询过程 一般性的查询前提: 1).对故障缺陷的检查。 2).查询故障存储。 3)检查车辆正确控制单元编码。 4)检查车辆正确电器元件匹配。 5).保险丝检查。
5.检查过程 1).用故障查询指南读取所有故障存储。 2)故障查询指南的结果(如果存在)。 3)用读取测量数据块确定故障存储记录(如果存在)。 4)用执行元件自诊断确定故障存储记录(如果存在)。 5)用检测仪确定故障存储记录。 6)用万用表进行电器检测,例如:线路通断。
汽车can总线工作原理及测量方法详解

汽车can总线工作原理及测量方法详解CAN总线的总体结构CAN总线由CAN控制器、CAN收发器、数据传输线、数据传输终端等组成。
CB311的ECU(发动机控制单元)、TCU(变速器控制单元)、FEPS(无钥匙进入和无钥匙启动系统)、组合仪表四个电控单元通过CAN总线连接,CAN控制器、CAN收发器均集成在电控单元中。
CB311CAN总线的结构如图1所示。
图1 CB311 CAN总线的总体结构1、CAN控制器CAN控制器集成在电控单元内部,接收由控制单元微处理器传来的数据。
CAN控制器对这些数据进行处理并将其传递给CAN收发器;同样CAN控制器也接收收发器传来的数据,处理后传递给控制单元微处理器。
2、CAH收发器CAN收发器集成在电控单元内部,同时兼具接收、发送和转化数据信号的功能。
它将CAN控制器发送来的电平信号数据转化为电压信号并通过数据传输线以广播方式发送出去。
同时,它接收数据传输线发送来的电压信号并将电压信号转化为电平信号数据后,发送到CAN控制器。
3、数据传输线为了减少干扰,CN总线的数据传输线采用双绞线,其绞距为20mm,截面积为0.5m,称这两根线为CAN-高线(CAN-H)和CAN-低线(CAN-L),如图2所示。
两根线上传输的数据相同,电压值互成镜像,这样,两根线的电压差保持一个常值,所产生的电磁场效应也会由于极性相反而互相抵消。
通过该方法,数据传输线可免受外界辐射的干扰;同时,向外辐射时,实际上保持中性(即无辐射)。
4、数据传输终端数据传输终端是一个电阻器,阻止数据在传输终了被反射回来破坏数据,一般数据传输终端为120Q的电阻。
CB311的数据传输终端为两个1202的电阻,分别集成在BCU和组合仪表中。
汽车CAN总线数据传输系统构成及工作原理现代汽车的电控单元主要有主控制器、发动机控制系统、悬架控制系统、制动防抱死控制系统(ABs牵引力控制系统、AsR控制系统、仪表管理系统、故障诊断系统、中央门锁系统、座椅调节系统等。
汽车车身CAN总线系统设计
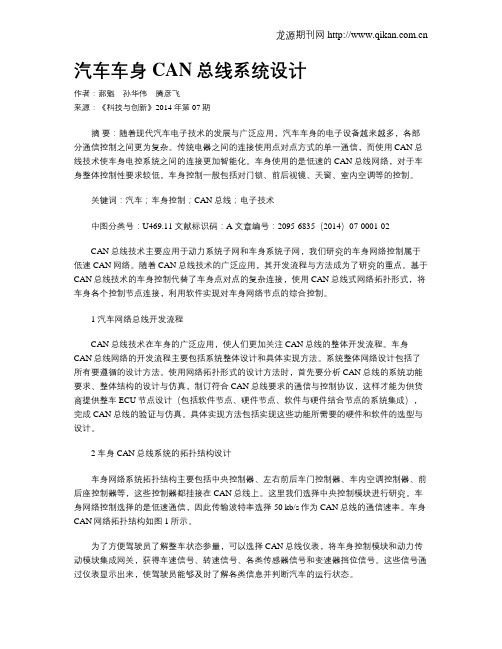
汽车车身CAN总线系统设计作者:郝魁孙华伟腾彦飞来源:《科技与创新》2014年第07期摘要:随着现代汽车电子技术的发展与广泛应用,汽车车身的电子设备越来越多,各部分通信控制之间更为复杂。
传统电器之间的连接使用点对点方式的单一通信,而使用CAN总线技术使车身电控系统之间的连接更加智能化。
车身使用的是低速的CAN总线网络,对于车身整体控制性要求较低。
车身控制一般包括对门锁、前后视镜、天窗、室内空调等的控制。
关键词:汽车;车身控制;CAN总线;电子技术中图分类号:U469.11 文献标识码:A 文章编号:2095-6835(2014)07-0001-02CAN总线技术主要应用于动力系统子网和车身系统子网,我们研究的车身网络控制属于低速CAN网络。
随着CAN总线技术的广泛应用,其开发流程与方法成为了研究的重点。
基于CAN总线技术的车身控制代替了车身点对点的复杂连接,使用CAN总线式网络拓扑形式,将车身各个控制节点连接,利用软件实现对车身网络节点的综合控制。
1 汽车网络总线开发流程CAN总线技术在车身的广泛应用,使人们更加关注CAN总线的整体开发流程。
车身CAN总线网络的开发流程主要包括系统整体设计和具体实现方法。
系统整体网络设计包括了所有要遵循的设计方法。
使用网络拓扑形式的设计方法时,首先要分析CAN总线的系统功能要求、整体结构的设计与仿真,制订符合CAN总线要求的通信与控制协议,这样才能为供货商提供整车ECU节点设计(包括软件节点、硬件节点、软件与硬件结合节点的系统集成),完成CAN总线的验证与仿真。
具体实现方法包括实现这些功能所需要的硬件和软件的选型与设计。
2 车身CAN总线系统的拓扑结构设计车身网络系统拓扑结构主要包括中央控制器、左右前后车门控制器、车内空调控制器、前后座控制器等,这些控制器都挂接在CAN总线上。
这里我们选择中央控制模块进行研究。
车身网络控制选择的是低速通信,因此传输波特率选择50 kb/s作为CAN总线的通信速率。
车身控制系统课件:汽车数据总线传输系统 -

控制單元 3
數據檢測 數據接收
控制單元 4
數據處理 數據Βιβλιοθήκη 測 數據接收3. 數據接收 在網路上其他所有的控制單元做好接 收數據的準備
4. 數據檢測 控制單元檢測它所接收到的數據對它 的功能是否有必要
數據匯流排
5. 數據接受 如果數據是重要的,接收並處理,否則忽 略
汽车车身控制系统
汽车数据总线传输系统
汽車中控制單元急劇增加
45
C6
40
35
30
C5
25
20
B5
15
10
5
B4
0 90 92 94 96 98 00 02 04
汽车车身控制系统
汽车数据总线传输系统
未採用數據匯流排系 統
➢ 線束總長: 3860米 ➢ 線束數量: 2110 ➢ 重量: 64 kg
汽车车身控制系统
採用最新電子技術和工業現場匯流 排技術 控制單元功能擴展 汽車局域網技術國際標準化
雨刮電機 J 400
車內監控 G 273
新鮮空氣鼓風機 J 126
無鑰匙天線單元 J 723
雨滴 / 陽光感測器J388
報警喇叭 H 12
製冷劑壓力和溫度 G 395
TV 調協器 R 78
語音輸入J 507
MOST CAN 組合儀錶 CAN驅動 CAN 診斷 CAN 舒適 CAN 車距調節 LIN 各種子匯流排系統
汽车数据总线传输系统
數據匯流排系統 MOST匯流 排
汽车车身控制系统
汽车数据总线传输系统
數據匯流排系統 MOST匯流 排
Media:媒體 Oriented:導向 System:系統 Transport:傳輸
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
车距调节 J 428
前部信息显示和 操纵单元 J523
数据总线诊断接口 J533
电话发送和接收器 R36
电话/ telematics J 526
导航 J 401
电话听筒 R 37
电能管理J 644 辅助加热 J 364
停车辅助系统 J 446
面板 供电 J 520 起动和授权 J 51
面板供电 J 519
第5章 汽车数据总线传输系统
培训目标 : 能掌握CAN总线的应用背景 能掌握CAN总线的分类 能掌握CAN各总线的原理 了解CAN总线的诊断与检测方法
汽车中控制单元急剧增加
联网的控制器个数(CAN, SUB-CAN, LIN)
45
C6
40
35
30
C5
25
20
B5
15
10
5
B4
0 90 92 94 96 98 00 02 04
TV 调协器 R 78
语音输入J 507
MOST CAN 组合仪表 CAN驱动 CAN 诊断 CAN 舒适 CAN 车距调节 LIN 各种子总线系统
左前传感器 J388
5.2 CAN-BUS汽车数据总线传输系统故障类型及检测诊断方法
汽车数据总线传输系统故障的原因有三种 一是汽车电源系统引起的故障; 二是汽车数据总线传输系统的链路故障; 三是汽车数据总线传输系统的节点故障。
诊断步骤
1.了解车型的汽车数据总线系统特点(包括:传输介质、几种 子网及汽车数据总线系统的结构形式等);
3. 数据接收 在网络上其他所有的控制单元做好接 收数据的准备
4. 数据检测 控制单元检测它所接收到的数据对它 的功能是否有必要
数据总线
5. 数据接受 如果数据是重要的,接收并处理,否则忽 略
数据总线通讯
语言
摩尔斯编码
二进制编码
信息:汽车运行所需的各种数据 信号:传递信息的运行方式,通常有电信号、光信号等 通讯:信息交换和处理 编码:汽车数据总线采用二进制和十六进制编码
5.3奥迪汽车数据总线系统
三条数据总线
CAN –驱动
500 kBaud
CAN – 舒适
100 kBaud
CAN – 信息娱乐 100 kBaud
A4 CAN 数据总线网络
连接部件
发动机控 制单元
自动变速器 控制单元
ESP控制 单元
安全气囊 控制单元
氧传感器 (美国)
驱动 CAN bus
舒适系统中 央控制单元 及四个车门 控制单元
2.汽车数据总线传输系统的功能,如:有无唤醒功能和休眠 功能等;
3.检查汽车电源系统是否存在故障,如:交流发电机的输出 波形是否正常(若不正常将导致信号干扰等故障)等;
4.检查汽车数据总线传输系统的链路是否存在故障,采用波 形和跨线法来进行检测;
5.检查汽车数据总线传输系统的节点是否存在故障,采用汽 车诊断仪进行检测,可以尝试采用替换法进行维修。
G85
5.1.1 CAN数据传输系统组成 控制单元
中央程序器(CPU) > 控制单元主要计算器
收发器(Tranceiver) > 发送器(Transmitter) > 接收器(Receiver)
控制器(Controller) > CAN通讯的控制单元 > 过滤接收指令 > 形成要发送的指令
数据总线终端电阻
Controller:控制器 Area:区域 Network:网络
控制单 元1
控制单 元3
汽车运行数据传递 经济、可靠、快捷、安全
控制单 元2
数据总 线
控制单 元4
数据总线系统 CAN总线
J104
J285
J220 J234
J217
CAN 总线的特点
• 传输速度快 • 相关控制单元可共用传感器 • 更少的线束、更小的控制单元,节省了空间
转向柱电气 控制单元
多功能方 向盘控制
单元
转向柱电气 控制单元
导航、电 视等
导航系统 接口
CAN data bus
驱动 CAN
High or/bk(桔黑) Low or/br(桔棕)
舒适 CAN
High or/gn(桔绿) Low or/br(桔棕)
wiring
信息娱乐 CAN
High or/vio(桔紫)
轮胎压力 驻车加热 空调控制 挂车识别 停车辅助 座椅调节 汽车电气 监控控制 控制单元 单元 控制单元 控制单元 控制单元 控制单元
单元
舒适 CAN bus
语音输入 控制单元
卡片阅读 器
远程通讯、 车载电话 电话控制 控制单元
单元
收音机
导航系统 控制单元
显示(信息娱乐) CAN bus
转向角度 传感器
Low or/br(桔棕)
奥迪A6L
组合仪表控制单元 J285
诊断接口 T16
NOX 传感器J 583
转速传感器 G 202
发动机电子 J 326
ABS 和EDL J 104
ቤተ መጻሕፍቲ ባይዱ
座椅占用识别 J 706
安全气囊J 234
右前大灯模块 J 668 左前大灯模块 J 667
自动变速箱 J 217
大灯照程调节 J 431
电动驻车 J 540
水平调节 J 197
司机侧门控单元 J 386
副司机侧 门控单元 J387
左后门 控制 单元 J388
右后门 控制单元 J388
座椅调节 J 136
副司机侧座椅 调节 J 521
挂车识别 J 345
转向角传感器 G 85
转向柱电气 J 527
门控单元, 后右 J389
多功能方向盘J 453
舒适系统 J 393
全自动空调 J 255
轮胎压力监控 J 502
CD 换碟机R 41
DSP放大器 J 525
收音机 R
使用和起动授权 E 415
雨刮电机 J 400
车内监控 G 273
新鲜空气鼓风机 J 126
无钥匙天线单元 J 723
雨滴 / 阳光传感器J388
报警喇叭 H 12
制冷剂压力和温度 G 395
5.1.2 CAN数据总线传输原理与过程
数据传输过程
1. 数据准备 CAN控制单元控制器为数据发送做准 备
2. 数据发送 CAN收发器从控制器得到数据,并将 之转为电信号发送出去
控制单元 1
数据处理 数据检测 数据接收
控制单元 2
数据准备
发送数据
控制单元 3
数据检测 数据接收
控制单元 4
数据处理 数据检测 数据接收
未采用数据总线系统
➢ 线束总长: 3860米 ➢ 线束数量: 2110 ➢ 重量: 64 kg
采用最新电子技术和工业现场总线 技术 控制单元功能扩展 汽车局域网技术国际标准化
5.1 CAN数据传输系统组成与工作原理
CAN 总线的特点 • 传输速度快 • 相关控制单元可共用传感器 • 更少的线束、更小的控制单元,节省了空间