第六章 雷达信号处理(1)-目标传输特征
雷达信号处理原理

雷达信号处理原理雷达(Radar)是利用电磁波传播的原理,通过接收和处理信号来探测、定位和追踪目标的一种技术。
雷达信号处理是指对接收到的雷达回波信号进行解调、滤波、增强、特征提取等一系列处理操作,以获取目标的位置、速度、形状、材料等信息。
本文将介绍雷达信号处理的基本原理及其主要方法。
一、雷达信号处理基本原理雷达信号处理的基本原理可以归纳为以下几个步骤:回波信号采集、信号预处理、目标检测、参数估计和跟踪。
1. 回波信号采集雷达将发射出的脉冲信号转化为电磁波,通过天线向目标发送,并接收目标反射回来的回波信号。
回波信号会包含目标的位置、形状、速度等信息。
2. 信号预处理由于雷达接收到的回波信号存在噪声、多径干扰等问题,需要对信号进行预处理。
预处理的主要目标是消除噪声、降低多径干扰,并使信号满足后续处理的要求。
3. 目标检测目标检测是指在预处理后的信号中判断是否存在目标。
常用的目标检测算法包括:恒虚警率检测、动态门限检测、自适应门限检测等。
目标检测的结果通常是二值化图像,目标区域为白色,背景区域为黑色。
4. 参数估计参数估计是指根据目标检测结果,对目标的位置、速度、方位角等参数进行估计。
常用的参数估计方法包括:最小二乘法、卡尔曼滤波等。
参数估计的结果可以用来进一步对目标进行跟踪和识别。
5. 跟踪目标跟踪是指根据参数估计的结果,对目标在时间上的变化进行预测和跟踪。
常用的目标跟踪算法包括:卡尔曼滤波、粒子滤波等。
目标跟踪的结果可以用来对目标进行轨迹分析和行为预测。
二、雷达信号处理方法雷达信号处理方法主要包括:滤波、相关、谱估计、目标识别等。
1. 滤波滤波是对信号进行频率或时间域的处理,常用于去除噪声、消除多径干扰等。
常见的滤波器包括:低通滤波器、高通滤波器、带通滤波器等。
滤波的方法有时域滤波和频域滤波两种。
2. 相关相关是利用信号的自相关或互相关性质,计算信号之间的相似度。
在雷达信号处理中,相关常用于目标的距离测量和速度测量。
雷达信号处理

雷达信号处理在第二次世界大战之后,特别是近几十年来随着电子技术的发展,无线电子技术在现代武器装备的使用中越来越广泛,使得雷达技术得到了突飞猛进的发展,目前雷达在军事和民用领域已经被广泛的应用,使用雷达不仅能够进行目标的探测、定位和跟踪,而且还可以进行导航、遥感、天气预报及空中交通管制等方面的应用。
雷达已成为信息获取和精确制导领域中使用最广泛、地位最重要的装备,它能够在广大作战地域内及时、准确、全面地获取各目标信息。
雷达发现并测定目标的位置是利用目标对电磁波的反射现象实现的[1]。
通常,雷达要探测的目标是运动着的飞机、导弹、舰艇、坦克等物体。
当雷达将目标探测到后,就要从目标回波中提取有关信息,但是目标的周围不可避免的存在着地物、云雨、海浪及金属箔条等背景。
进行目标的探测会受到这些背景所产生的回波带来的负面影响,将其称为杂波或无源干扰。
如果目标处在杂波背景中,弱的目标可能会淹没在强杂波中,而且强的杂波还会使雷达接收机过载。
由于强度通常比有用信号大几十分贝的杂波伴随着目标信号一同进入雷达接收机,给目标的检测造成了很大的干扰,因此,信号检测的关键技术之一就是杂波抑制技术[1]。
目前,有很多用于杂波抑制的措施,其中与信号处理相关的抑制杂波的方法主要包括:动目标显示(MTI)技术、动目标检测(MTD)技术和脉冲多普勒(PD)技术等,统称为频域处理,它们的机理是利用目标和杂波相对雷达运动速度的不同而引起多普勒的差异,进而通过滤波来抑制杂波,从而进行动目标的信息的提取。
随着超大规模集成电路(VLSI)技术和计算机辅助设计(CAD)技术的发展,现场可编程门阵列(FPGA,Field programmable Gate Array)出现了。
FPGA于1985首次推出,它是一种新型的高密度PLD,采用CMOS-SRAM工艺制作。
与门阵列PLD不同,FPGA内部由许多独立的可编程逻辑模块(CLB)组成,逻辑块之间可以灵活地相互连接。
【重要】雷达信号处理

16
4
有效照射深度
近似圆柱体
V = π ⎜⎛ r θ ⎟⎞⎜⎛ r ϕ ⎟⎞ h = π⎜⎛ rθ ⎟⎞2 h , h =τc ⎝ 2 ⎠⎝ 2 ⎠ 2 ⎝ 2 ⎠ 2
33
Rain Attenuation
The expected percentage of drops of specific sizes over precipitation rates is shown below.
34
4 强度回波积累及平均概念
35
36
9
驻留时间
• 天线扫描经历同一气象目标所花费的时间。 通常以天线波束3dB宽度作为驻留同一目标的 有效宽度。
5
天线有效接收面积
Ae
=
λ2 4π
G
Pr
=
Ss (π ) Ae
=
PtGσ (4πr2)2
Ae
6
不计衰减 回到雷达处的散射功率密度
7
8
2
目标接收到的功率
计入损耗 天线接收的功率
9
基本点目标雷达方程
10
点目标雷达方程推导过程总结
11
12
3
2、分布式目标雷达方程
• 点目标雷达方程是进行推导面散射、体散射雷达方 程的起点。对此,必须考虑天线功率增益随方位和 仰角的变化。那么发射的能流密度可写为:
37
径向内的雷达数据样本采集
驻留时间与样本数
样本数: M = PRF ×θ3dB
ω
PRF : 脉冲重复频率 θ3dB :3dB波束宽度(deg) ω :天线扫描速率(deg/s)
精品文档-雷达对抗原理(第二版)(赵国庆)-第6章
6.1 概述 6.2 射频噪声干扰 6.3 噪声调幅干扰 6.4 噪声调频干扰 6.5 噪声调相干扰
第1章 绪 论
6.1 概 述 雷达获取目标信息的过程可用图6-1来表示。首先,雷达向 可能存在目标的空间发射电磁波信号sT(t),当该空间存在目标 时,sT(t)信号会受到目标距离、角度、速度等参数特性的调制, 形成回波信号sR(t)。在雷达接收机中,通过对接收信号sR(t)的 放大、滤波和解调,可得到有关目标距离、角度、速度等信息。 图中增加的c(t)是因为雷达接收机中的信号除了目标回波sR(t) 以外,还存在各种内外噪声、杂波、多径回波等。正是由于这 些噪声才影响了雷达检测目标的能力。可见,如果在sR(t)中引 入人为噪声干扰信号或利用吸波材料减小目标回波信号的功率, 都可以阻碍雷达探测目标,达到干扰的目的。
3) 扫频式干扰
扫频式干扰一般满足:
(6-3)
Δfj≤(2~5)Δfr,fs=fj(t),t∈[0,T]
即0m干tinT扰f信jt号,0m中taxT心f j频t率fj(t)是覆盖fs、以T为周期、在扫频范围
[
]内连续调谐的函数。扫频式干扰可以对
干扰频带内的各雷达形成周期性间断的强干扰。由于扫频范围
较大,也可以降低对频率引导的要求,同时干扰扫频范围内的
f fL f fL
HI f 2 df
2
HI f df
(6-20)
式中, fL为本振频率,HI(f)为中放及接收前端的频率响应。
当接收机为理想的匹配滤波器时,HI(f)=kF*s(|f-fL|)e-
j2πft0,中放输出的信号峰值功率为
SI
Fs
f fL HI
雷达信号处理过程说明文档
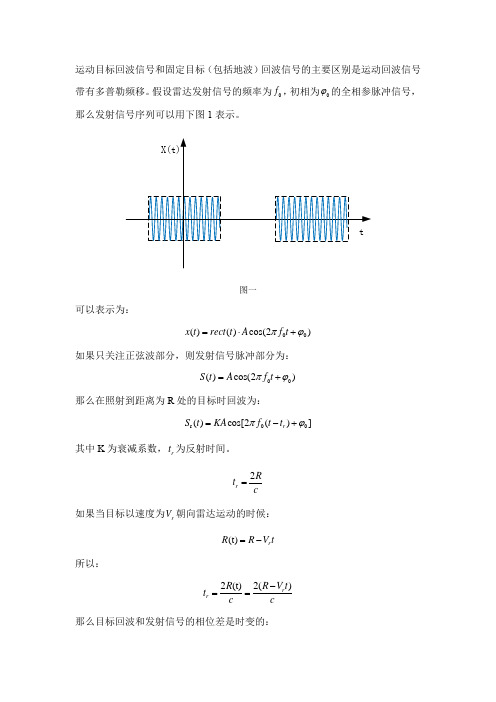
运动目标回波信号和固定目标(包括地波)回波信号的主要区别是运动回波信号带有多普勒频移。
假设雷达发射信号的频率为0f ,初相为0ϕ的全相参脉冲信号,那么发射信号序列可以用下图1表示。
图一可以表示为:00()()cos(2)x t rect t A f t πϕ=⋅+如果只关注正弦波部分,则发射信号脉冲部分为:00()cos(2)S t A f t πϕ=+那么在照射到距离为R 处的目标时回波为:r 00()cos[2()]r S t KA f t t πϕ=-+其中K 为衰减系数,r t 为反射时间。
2r R t c= 如果当目标以速度为r V 朝向雷达运动的时候:(t)r R R V t =-所以:2()2(t)r r R V t R t c c-== 那么目标回波和发射信号的相位差是时变的:0024()/c r r f t f R V t ϕππ=-=--当目标是运动的时候,发射与接收的信号之间有一个频率差,用d f 表示:21d =2d r d V f t ϕπλ=⨯ 假设基频为0f 雷达信号经过反射之后变为0d f f +,接收之后对信号进行数字下变频(DDC )将原有的信号的载频0f 去除,获得只含有频移d f 的信号。
图二 所以在全相参雷达中,可以使用正交相位检波器来获得中频信号的基带信号()x t ,有时也称()x t 为中频信号的复包络。
即:(t)()=()+j ()()j I Q x t x t x t a t e ϕ=上式中:()()cos (t)()()sin (t)I Q x t a t x t a t ϕϕ==通过低通滤波器之后,输出的双正交通道信号分别为:()()cos (t)(t)cos(2)()()sin (t)(t)sin(2)I d Q d x t a t Ka f t x t a t Ka f t ϕπϕπ====脉冲压缩: 此时正交两路信号为经过调制(线性调制,非线性调制或相位编码)的大时宽带宽信号。
雷达系统的信号处理与目标识别算法分析

雷达系统的信号处理与目标识别算法分析一、引言雷达(Radar)系统是一种利用电磁波对目标进行跟踪和探测的设备。
随着科技的进步和各个领域对雷达系统的需求增加,雷达的信号处理和目标识别算法变得更加重要。
本文将对雷达系统的信号处理和目标识别算法进行深入分析。
二、雷达原理和信号处理雷达系统利用发送出去的电磁波与被目标反射回来的电磁波之间的时间差和频率差来测量目标的距离和速度。
在雷达信号处理中,需要对接收到的信号进行一系列的处理,以提取出有用的信息。
1. 预处理预处理是信号处理的第一步,其目的是将原始信号转换为能够提供更多信息的形式。
其中包括抗干扰处理、时延或频率的补偿、动态范围的优化等。
2. 目标检测目标检测是雷达信号处理中的核心环节。
常用的目标检测算法包括:常规滤波器法、匹配滤波器法、CFAR(恒虚警率)检测法等。
这些算法可以利用雷达信号与背景噪声之间的差异来检测出目标的存在。
3. 脉冲压缩脉冲压缩是为了提高雷达系统的距离分辨率。
通过对返回的一系列脉冲信号进行加权和积累,可以将相邻脉冲之间的能量对比增大,从而提高目标分辨能力。
4. 构建回波信号的径向速度信息雷达系统可以利用多普勒效应测量目标的速度。
在信号处理中,可以通过采用FFT(快速傅里叶变换)等算法,将时间域的信号转换到频率域,从而得到目标的速度信息。
三、目标识别算法分析目标识别是在得到目标的距离、速度等信息后,进一步对目标进行分类和识别的过程。
目标识别算法需要从海量的目标数据中提取出有效特征,并进行合理的分类和判别。
1. 特征提取特征提取是目标识别的重要环节。
常用的特征包括目标的形状、反射率、运动轨迹等。
常用的特征提取算法有:HOG(方向梯度直方图)、SIFT(尺度不变特征变换)、CNN(卷积神经网络)等。
2. 分类和判别在得到目标特征后,需要通过分类和判别算法将目标进行识别。
常用的分类算法有支持向量机(SVM)、最近邻(k-NN)和深度学习等。
雷达信号处理概述
雷达信号处理概述雷达信号处理是指对观测到的信号进行分析、变换、综合等处理,以达到抑制干扰、杂波等非期望信号,增强有用信号,并估计有用信号的特征参数,或是将信号变成某种更符合要求的形式。
随着微电子技术的迅速发展,信号处理的方式也从早期的模拟域发展到几乎都采用数字域。
数字信号处理以数字或符号序列表示信号,用数值计算的方法完成对信号的各种处理。
模拟信号转换为数字信号的过程(采样、量化)如下图所示。
数字信号处理的主要方法有数字卷积(时域处理)、频谱分析(频域处理)、数字滤波(包括有限冲激响应滤波器(FIR)和无限冲激响应滤波器(IIR))等。
雷达信号处理的任务雷达信号处理的任务就是最大程度地抑制噪声和干扰,提取与目标属性有关的信息。
从狭义上讲,雷达信号处理是指对经接收机处理后的信号进行处理,在多种干扰背景中完成目标检测与信息的提取,主要包括干扰抑制、目标检测、信息提取。
从广义上讲,雷达信号处理涉及各种不同发射波形的选择、检测理论、性能评估以及天线和显示终端或数据处理计算机之间的电路装置(硬件和软件),以完成所要求的信号之间的变换和参数提取。
具体来说,信号处理包括信号产生、信号提取、信号变换三大类,其中信号产生包括调制、上变频、倍频、合成、放大和波束形成等;信号提取包括解调、下变频、分频、滤波、检测和成像等;信号变换包括频率变换、A/D变换、相关、放大及延时等。
根据雷达的任务及其工作环境,对雷达信号处理的要求是:•能够处理海量信息,即不仅能够获取目标的位置和数量等常规信息,还能获取目标的属性或图像信息•实时性强,使完成一次处理所用的时间与雷达的数据率相匹配•鲁棒性好,能够在复杂的电磁环境(特别是强电磁干扰环境)下正常工作实现上述要求取决于雷达的以下能力:•有效抑制杂波和干扰的能力•目标回波能量的有效收集能力,主要措施有:①改善天线的主瓣增益,降低旁瓣②降低天线转速,增加每个波位的驻留时间③选择能量利用率高的信号形式④提高雷达发射信号的峰值功率⑤距离维匹配滤波(脉冲压缩)⑥方位维一次扫描周期内对个波位的多个脉冲的相干和非相干积累⑦扫描周期间的积累(航迹提取)•高效的空间搜索能力•良好的空间分辨能力,主要措施有:①尽可能地增大天线的功率孔径积,提高角分辨能力②改进测角方式,提高角度测量精度③使用距离波门(时域滑窗)进行距离跟踪,减小多目标在频域的混叠④使用大带宽信号和脉冲压缩技术,提髙距离分辨能力⑤采用频率滤波,提高速度分辨能力⑥通过合成孔径,提高方位分辨能力⑦两天线干涉合成,提高俯仰角分辨能力•良好的环境适应能力:①自适应杂波抑制(自适应滤波、自适应CFAR、杂波图等)②自适应数字波束形成③智能化特征抽取和目标识别算法④多模式协同工作(例如预警机、多模式SAR)雷达信号处理的分类雷达信号处理的分类方法较多,按处理域分为时域信号处理、空域信号处理、频域信号处理、极化域信号处理和多域联合信号处理。
雷达系统中的信号处理技术
主要内容
关键技术
小结
雷达脉冲压缩技术
脉冲压缩的程度用脉冲压缩系数D表示,它定 义为:
D 0
D即压缩后的脉冲宽度τ比发射脉冲宽度τ0缩小的 倍数,亦称脉压比。它是衡量脉压处理的主要技 术指标之一。
13
目录
Contents
雷达系统概述
主要内容
关键技术
小结
动目标检测MTD
MTD也就是一种相参积累和多普勒滤波的结合,相干积 累的目的为:
目录
Contents
雷达系统概述
主要内容
关键技术
小结
设加在第k个滤波器的第i个输出端头的加权值为:
wik e-j[2 (i1)k / N],i 0,1, N 1
k表示标号从0到N-1的滤波器,每一个k值对应一组不同的加权 值,相应地对应一个不同的多普勒滤波器响应。图10中所示滤 波器响应是N=8时加权所得各标记k的滤波器频率响应,k取 0~7。该滤波器的频率覆盖范围为0到 fr 。 在仿真实验中,通 常是通过快速傅里叶变换FFT来实现的。
雷达系统概述
主要内容
关键技术
小结
三、雷达系统信号处理 关键技术及分析
6
目录
Contents
雷达系统概述
主要内容
关键技术
小结
雷达系统信号处理关键技术
1 数字正交相干检波
2
3 动目标检测MTD
4
脉冲压缩技术
恒虚警检测CFAR
7
目录
Contents
雷达系统概述
主要内容
关键技术
小结
数字正交相干检波
相干检波 技术的优 点
雷达系统中的信号处理技术
雷达信号与数据处理整理多媒体
(3)雷达脉冲压缩技术
窄脉冲宽度可提高距离分辨率,但影响平均功率而降低了测量距离。 发射大时宽带宽积(Bt)信号,可以提高雷达的距离分辨率,同时提
高发射信号的平均功率,即那个地发射脉冲的峰值功率。
接收时对大时宽进行进行匹配滤波,可使接收信号回波信号变窄,成 为脉冲压缩。
雷达可分为陆基、机载、星载或舰载雷达系统; 按雷达波形分,可分为:连续波(CW)雷达、脉冲 (PW)雷达。
2.2 距离
简化的脉冲雷达框图
时间 控制
发射机/调制器 信号处理器
双工器 接收机
发射接收脉冲串
发射脉冲
脉冲1
IPP
τ
脉冲2
脉冲3
接收脉冲
△t τ 脉冲1回波
脉冲2回波
脉冲3回波
时间
IPP:通常被标为PRI脉冲重复间隔
(6)雷达成像技术
机载或星载雷达,距离和方位的高分辨成像。 距离分辨率,通过脉冲压缩技术实现;方位分辨率通过合成孔径技术
实现。 移动雷达,如SAR;地面雷达,ISAR。
(7)雷达目标的识别和分类
目标识别,判别目标类型。
主要通过信号处理实现。
(8)雷达抗电子干扰技术
无源干扰:箔条,可利用抑制气象杂波的方法。
雷达信息显示包括各种原始回波和处理回波的显示; 雷达回波显示与雷达整机控制设计为一体,通过画面显示、重要目
标三维放大显示等,辅助目标识别。
(7)雷达数据处理系统设计技术
输入/输出接口设计; 系统处理能力设计; 核心算法设计; 显示与控制一体化设计; 人-机接口与人性化界面设计; 系统各设备集成设计等。
ERP PJ GJ LJ
雷达信号处理中的目标识别技术
雷达信号处理中的目标识别技术雷达作为现代武器系统中不可缺少的一部分,具有广泛的应用。
在使用过程中,雷达需要将接收到的信号进行处理,以实现对目标的探测与识别。
其中,目标识别技术是雷达信号处理中的重要组成部分,也是决定雷达性能和作战效果的关键因素之一。
一、目标特征提取目标识别技术的核心是目标特征提取,即通过对雷达接收到的信号进行分析和处理,提取出与目标相关的特征信息。
目标特征主要包括散射特征、运动特征和形态特征等。
其中,散射特征是指目标使雷达接收到的电磁波在空间和时间上的分布特性,通常用雷达截面积(RCS)来描述;运动特征是指目标运动的速度、方向和加速度等,可以通过多普勒频移和相位变化等特征进行提取;形态特征是指目标的几何形状、轮廓和纹理等,常用的提取方法包括边缘检测、轮廓提取、特征点匹配等。
目标特征的提取方法有很多种,如时域分析、频域分析、小波分析、深度学习等。
其中,时域分析是最基本和常用的方法之一,目标的散射信号通常通过时域信号处理进行分析和处理,得到目标的距离、径向速度和加速度等信息;频域分析则是通过傅里叶变换等方法将信号变换到频域,从而获得目标的频率和幅值等信息;小波分析是一种新型的信号处理方法,它通过小波变换将信号分解为多个不同频率的子带,以提高信号处理的精度和效率;深度学习则是近年来兴起的一种人工智能技术,通过神经网络等方法对海量数据进行学习和训练,以实现目标特征的高效提取和识别。
二、目标分类和识别目标特征提取后,还需要对目标进行分类和识别,即根据特征信息将目标归类到不同的目标库中,并判断目标是否是敌我识别。
目标分类和识别的方法主要包括基于特征匹配、基于统计分类、基于神经网络等多种方法。
基于特征匹配的方法是将目标特征与目标库中已知的目标特征进行比对,通过一定的相似度判断将目标归类到相应的目标类型中。
该方法需要建立大量的目标库,对目标特征的匹配精度以及库中目标的类型和数量要求较高,适用于目标类型比较固定的场景。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
气象雷达原理与系统电子工程学院大气探测学院1第六章气象雷达信号处理基础(一)——气象目标特征1.气象目标散射现象及散射特性2.后向散射截面3.单个小球形粒子的散射——瑞利散射4.单个球形粒子的散射——米散射(Mie散射)5.粒子群的散射6.球形水滴和冰粒的散射7.晴空回波的散射和反射机制8.雷达电磁波及其传播环境9.衰减234一、气象目标散射现象及散射特性气象目标对电磁波的散射粒子产生散射的原因•散射波:粒子在入射电磁波极化下作强迫的多极振荡,从而发出次波•粒子对入射电磁波的散射,只改变电磁波的传播方向,没有使电磁形式的能量转化为别的形式的能量•粒子散射电磁波的能力,和粒子的大小、形状、以及它的电学特性有关散射波入射波5散射求解•由于数学处理上比较困难,目前只能对圆球形、圆柱形、椭球形等少数几种几何形状比较简单的粒子的散射能做出精确的解析解•气象上云滴、雨滴等粒子一般可以近似地看作是圆球形或椭球形•67⏹设有一理想的散射体,其截面为:⏹它能全部接收射到其上的电磁波能量,并全部均匀地向四周散射,若该理想散射体返回雷达天线处的电磁波能流密度,恰好等于同距离上实际散射体返回雷达天线的电磁波能流密度,则该理想散射体的截面就称为实际散射体的后向散射截面。
二、后向散射截面-衡量散射能量822)4()(r G P S t s πσπ=922()()44:.:.:i S S ii S S S S r r S S S r σππσππ=⇒=则有:到达降水粒子的入射波能流密度粒子后向散射到雷达天线的能流密度粒子到雷达的距离由于实际粒子不是理想的散射体,所以粒子的后向散射截面积不等于它的几何截面积。
通常小于几何截面积。
后向散射截面与几何截面的比值称为标准化的后向散射截面,用表示b σ1b σ≤•后向散射截面常用来表示雷达观测中向后方的散射能量,或回波强度。
•说明:1.假想面积2.描述目标在一定入射功率下后向散射功率能力的量。
3.该量以面积单位来描述。
面积越大,后向散射能力越强,产生的回波功率也就越大。
1011'σσ雷达目标1目标2雷达发射功率及天线增益相同,如果目标的等效散射截面积不同,则后向散射强度不同,即目标2的回波强度大于目标1的回波强度•当雷达波长λ确定后,球形粒子的散射情况主要取决于粒子直径d和入射波长λ之比。
•对于d<<λ的小球形粒子的散射,称为瑞利散射。
•d≈λ的大球形质点的散射,称为米散射1213•是复折射指数;n是普通的折射指数,K是吸收系数λπra 2=iK n m -=可见,Rayleigh散射时,散射截面的大小与粒子的物理性质、粒子半径r、波长有关。
225622264221281213232i r m m a m m πλσλπ--==++瑞利散射是对于d<<λ的小球形粒子的散射。
当满足瑞利散射条件时,散射截面积可由下式表示:对于瑞利散射而言,a<0.13三、瑞利散射14以3mm(直径)雨滴为例,不同波段的散射特性判断2,0.13ra πλ=作为判据0.3 3.140.314030.3 3.140.188450.3 3.140.094210c m c m c m c m c m c mααα⨯==⨯==⨯==X 波段C 波段S 波段四、米散射•当a>0.13时,用瑞利公式计算会产生误差,a越大,瑞利散射误差就越大。
•Mie散射建立了包括大、小粒子在内的普遍的球形粒子散射理论。
15•(1)粒子是球形的,粒子内外都不含自由电荷,散射粒子不是导电体;•(2)粒子内、外介质是均匀各向同性的,粒子外介质一般是空气或真空;•(3)入射电磁波随时间作简谐变化。
16(1)散射波是以粒子为中心的球面发散波;(2)散射波是横波,且是椭圆偏振波;(3)散射波和入射波同频率;(4)散射波能流密度是各向异性的;大部分能量集中在0度附近的方向上,a越大,向前散射的能量占全部散射能量的比重越大。
(5)散射波性质与入射波波长λ、散射粒子半径r、粒子及环境的物理特性等有关。
a a=1()()17b a=318小球形粒子的散射方向性图10cm 雷达测小于4mm 的雨滴;3cm 雷达测小于1.2mm 的雨滴Mie散射理论参阅:•大气辐射导论(第2版)丛书:•作者:(美)廖国男郭彩丽周诗健•出版时间:2004-10-1•ISBN:7502938648•气象出版社19五、粒子群的散射粒子群散射造成的回波功率的脉动•表现特征:•在PPI显示器上,表现为这种涨落使降水回波边缘显得模糊。
•雷达波长越小,波动性越大。
•原因:•由于散射能量同时到天线处的许多降水粒子之间相对位置不断变化,从而使各降水粒子产生的回波到达天线的行程差也发生不规则的变化。
•探测云时也有同类情况,但回波的脉动要弱。
2021•各粒子的散射波符合叠加原理•合成回波的场强:•通过以上的分析可知,粒子群内各粒子之间的无规则运动,导致粒子群造成瞬间的回波功率脉动。
个回波的初相是第i R t E kR t E t E ii Ni i i Ni i i :2)cos()cos()(11λπϕϕωω=-=-=∑∑==粒子群散回波场强解析22•2、平均回波功率•粒子群造成的回波功率对时间的平均值是较稳定的,在数值上等于每个粒子各自产生的回波功率的总和。
•该式说明:在一个体积块内,N个粒子回波功率的时间平均值,等于各个粒子的回波功率的和。
•为了得到比较稳定的数值,只需要对回波功率Pr进行时间上的平均。
∑=∝Ni imr EP 12各粒子回波功率之和六、球形水滴和冰粒的散射•大气中气象粒子的尺寸分布——滴谱极广,因此散射归属不好确定•雷达回波为全部粒子散射的综合,难于得到完全意义上的解析公式和解析解•反射率(因子)与滴谱只有定性关系2324•米散射的后向散射函数:普遍的球形粒子•其中,a n 、b n 为散射场的系数212))(12()1(41)(∑∞=-+-=n n n nb a n kπβλπ2=k 粒子的后向散射函数2524624220.13161()2ra rm m πλπβπλ=<<-=+在时瑞利散射经过距离R 散射到天线处的散射能流密度为:)()(2πβπRS S iS =单个球形粒子的瑞利散射截面积262()4():,::4()S iS i S R S S R S ππσπσπβπ==从粒子发出的各向同性散射功率到雷达距离入射波功率所以,2562421,2D m m n iK m πσλ-==-+瑞利散射下的雷达截面计算公式27•雷达反射率:单位体积内全部降水粒子的雷达截面之和。
i Ni i功率大小子在天线处造成的回波反映单位体积内气象粒大小在天线处的回波功率的反映一个粒子后向散射:1ησση∑==引进反射率的概念不仅是为了考虑单位体积内的云、雨粒子的数目,还考虑到它们的滴谱的分布造成的每个粒子回波截面积的不同。
雷达发射率与反射率因子28iK n m m m D m m r-=+-=+-=,212164222465222465λπλπσ单位体积内的粒子数粒子密度大小在天线处的回波功率的反映一个粒子后向散射:)(:)(21)()(0622245dD D ,n n dDD D n m m dD D D n i σλπση⎰⎰∞∞+-==雷达观测到的回波功率Pr 的均值是一个与气象粒子、雷达相关的物理量。
不同的雷达、不同的距离上观测出的功率不相同。
因此不能简单地通过回波功率来比较云、雨的不同。
为了使不同波长的雷达所观测到的云雨等情况可以直接比较,使观测回波与雷达无关,引入雷达反射率因子这个量29Zm m 2224521+-=λπη关系:反射率因子:⎰∞=06)(dDD D n Z 所以,Z的大小取决于云、雨滴谱的情况,可以通过对云雨观测求得。
也可以通过雷达气象方程求算。
同时Z与D的六次方成正比,说明少数大水滴将提供散射回波功率的绝大部分。
30312.N D i 分布6i1.粒子大小分布雨滴数()m /0.4m m 3()m /mm /0.4m m 63N D i 6i 1041031021011.00 0.8 1.6 2.4 3.21041031021011.0雨滴谱与Z32/ 与a的关系M σRσMσR σ2.01.00.30.030.10.3 1.03.0=λ10cm3cm1.7cm 0.9cm=RMaλπra 2=瑞利后向散射截面与米后向散射截面33•云滴半径:只有5~10um,最大也不超过50um•雨滴半径:一般都在0.25~1.5mm之间,其中以0.35~0.45mm范围内为最多。
也有大于2mm的,但当半径大于3mm时水滴有时会在气流作用下发生破裂•厘米波测雨雷达对于云滴,瑞利公式完全适用•C波段[5.6cm]和S波段[10cm]雷达,瑞利公式对绝大多数的雨滴也适用• 3.2cm波长雷达,要订正•水滴半径在0.5~1.0mm内时,用瑞利公式计算的雷达截面误差不超过20%~30%滴谱与雷达散射截面表3.3.2采用瑞利近似时的水滴临界大小(cm )105.53.20.86r (mm) 2.0 1.10.60.17D (mm)4.02.21.20.34阅读教材p11234衰减造成回波失真35C波段X波段36S波段C波段非瑞利散射的等效反射率因子•如果在散射体积内包含大粒子或其他非瑞利散射粒子的情况下,则引入等效反射率因子概念.•反射率因子Z是用瑞利散射公式推导出来的,只适用于小粒子探测。
•当气象雷达探测大粒子时,由于不符合瑞利条件,因此得到的数据也不能真实表示大粒子的回波强度。
•如冰雹等大粒子,此时气象雷达方程所求出的Z不能代表真实的滴谱分布,只是一个与之对应的等效Z值。
用Ze来表示。
3738•Ze的意义:•能够产生同样回波功率,与小球粒子的等效的Z的数值•从而在Mie散射下,只要以Ze代替Z值,气象雷达方程仍可保持瑞利散射的简单形式。
•等效反射率因子 Mie散射下的气象雷达方程保持瑞利散射的简单形式()2426521102Mim Ze Z m λσπ--=+∑∑6iD rP39()2426521102Mim Ze Z m λσπ--=+∑式中:波长单位:cm ,面积单位:cm 2Ze 的单位:mm 6/m 3因此,在直接计算Ze 时,1)应先测定实际粒子的滴谱2)再计算雷达截面积(由瑞利散射公式算,及比较图表计算)3)再计算Ze.i σi M σ40Ze•小雨:•中雨:•雷暴雨:•冰雹、龙卷:)/(10362m mm Z e <)/(10103643m mm Z e <<)/(10103675m mm Z e <<)/(10103654m mm Z e <<41•瑞利散射区:•冰粒满足的瑞利散射的半径可以比水滴大•水滴散射是同半径冰粒散射的五倍•当时,雷达截面比粒子几何截面要小得多。