数字信号处理-时域离散随机信号处理(丁玉美)第二章习题答案
数字信号处理第二章习题答案

2-1 试求如下序列的傅里叶变换: (1))()(01n n n x -=δ (2))1(21)()1(21)(2--++=n n n n x δδδ (3)),2()(3+=n u a n x n10<<a(4))4()3()(4--+=n u n u n x(5)∑∞=-⎪⎭⎫⎝⎛=05)3(41)(k nk n n x δ(6)()6cos ,14()0,n n x n π⎧-≤≤=⎨⎩其他解: (1) 010()()j n j j nn X e n n ee ωωωδ∞--=-∞=-=∑(2) 2211()()122j j nj j n X e x n e e e ωωωω∞--=-∞==+-∑ωsin 1j +=(3) 2232()(2)1j j nj nn j nj n n a e X e a u n ea eaeωωωωω-∞∞---=-∞=-=+==-∑∑, 10<<a(4) []4()(3)(4)j j nn X e u n u n eωω∞-=-∞=+--∑∑-=-=33n nj e ω∑∑==-+=313n n j n nj e eωω(等比数列求解)ωωωωωj j j j j e e e e e --+--=--111134=⎪⎭⎫ ⎝⎛⎪⎭⎫⎝⎛=----ωωωωω21sin 27sin 1137j j j e ee ((1-e^a)提出e^(0.5a))(5) 3350011()(3)44nkj jn j k n k k X e n k e e ωωωδ∞∞+∞--=-∞==⎛⎫⎛⎫=-= ⎪ ⎪⎝⎭⎝⎭∑∑∑∑∞+=--⎪⎭⎫⎝⎛-=⎪⎭⎫⎝⎛=033411141k j kj e e ωω(6) 44336441()cos 32j j j jn jn n n X e nee e e ππωωωπ---=-=-⎛⎫==+ ⎪⎝⎭∑∑994()()4()()3333001122j j n j j n n n e e e e ππππωωωω--++===+∑∑ ()9()9334()4()33()()3311112211j j j j j j e e e e e e ππωωππωωππωω-+-+-+⎡⎤⎡⎤--⎢⎥⎢⎥=+⎢⎥⎢⎥++⎢⎥⎢⎥⎣⎦⎣⎦2-2 设信号}1,2,3,2,1{)(---=n x ,它的傅里叶变换为)(ωj e X ,试计算(1)0()j X e (2)()j X ed πωπω-⎰(3)2()j X e d πωπω-⎰。
数字信号处理课后习题答案(全)1-7章
第 1 章 时域离散信号和时域离散系统
(6) y(n)=x(n2)
令输入为
输出为
x(n-n0)
y′(n)=x((n-n0)2) y(n-n0)=x((n-n0)2)=y′(n) 故系统是非时变系统。 由于
T[ax1(n)+bx2(n)]=ax1(n2)+bx2(n2) =aT[x1(n)]+bT[x2(n)]
第 1 章 时域离散信号和时域离散系统
题4解图(一)
第 1 章 时域离散信号和时域离散系统
题4解图(二)
第 1 章 时域离散信号和时域离散系统
题4解图(三)
第 1 章 时域离散信号和时域离散系统
(4) 很容易证明: x(n)=x1(n)=xe(n)+xo(n)
上面等式说明实序列可以分解成偶对称序列和奇对称序列。 偶对称序列可 以用题中(2)的公式计算, 奇对称序列可以用题中(3)的公式计算。
(2) y(n)=x(n)+x(nN+1)k 0
(3) y(n)= x(k)
(4) y(n)=x(n-nn0)n0
(5) y(n)=ex(n)
k nn0
第 1 章 时域离散信号和时域离散系统
解:(1)只要N≥1, 该系统就是因果系统, 因为输出 只与n时刻的和n时刻以前的输入有关。
如果|x(n)|≤M, 则|y(n)|≤M, (2) 该系统是非因果系统, 因为n时间的输出还和n时间以 后((n+1)时间)的输入有关。如果|x(n)|≤M, 则 |y(n)|≤|x(n)|+|x(n+1)|≤2M,
=2x(n)+x(n-1)+ x(n-2)
将x(n)的表示式代入上式, 得到 1 y(n)=-2δ(n+2)-δ(n+1)-0.5δ(2n)+2δ(n-1)+δ(n-2)
数字信号处理课后习题答案(全)1-7章
将x(n)的表示式代入上式, 得到 1 y(n)=-2δ(n+2)-δ(n+1)-0.5δ(2n)+2δ(n-1)+δ(n-2)
+4.5δ(n-3)+2δ(n-4)+δ(n-5)
第 1 章 时域离系统的单位脉冲响应h(n)和输入x(n)分别有以下三种情况,
+6δ(n-1)+6δ(n-2)+6δ(n-3)+6δ(n-4)
1
4
(2m 5) (n m) 6 (n m)
m4
m0
第 1 章 时域离散信号和时域离散系统
(3) x1(n)的波形是x(n)的波形右移2位, 再乘以2, 画出图形如题2解图 (二)所示。
(4) x2(n)的波形是x(n)的波形左移2位, 再乘以2, 画出图形如题2解图(三) 所示。
(5)y(n)=x2(n)
(6)y(n)=x(n2)
(7)y(n)=
n
(8)y(n)=x(n)sin(ωxn(m) )
m0
解: (1) 令输入为
输出为
x(n-n0)
y′(n)=x(n-n0)+2x(n-n0-1)+3x(n-n0-2) y(n-n0)=x(n-n0)+2x(n—n0—1)+3(n-n0-2)
第 1 章 时域离散信号和时域离散系统
题2解图(四)
第 1 章 时域离散信号和时域离散系统
3. 判断下面的序列是否是周期的; 若是周期的, 确定其周期。
(1) x(n) Acos 3 πn A是常数
7 8
(2)
j( 1 n )
x(n) e 8
数字信号处理课后习题答案(全)1-7章
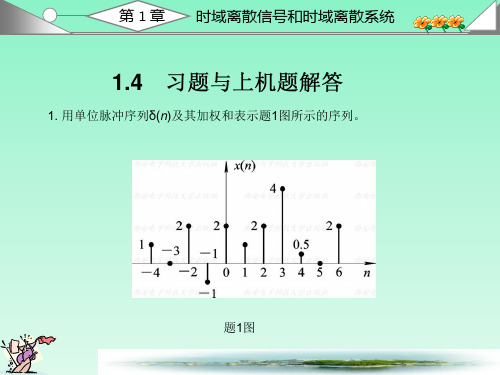
2. 给定信号:
2n+5
-4≤n≤-1
(x(n)=
6
0
0≤n≤4 其它
(1) 画出x(n)序列的波形, 标上各序列值;
(2) 试用延迟的单位脉冲序列及其加权和表示x(n)序列;
第 1 章 时域离散信号和时域离散系统
(3) 令x1(n)=2x(n-2), 试画出x1(n)波形; (4) 令x2(n)=2x(n+2), 试画出x2(n)波形; (5) 令x3(n)=x(2-n), 试画出x3(n)波形。 解: (1) x(n)序列的波形如题2解图(一)所示。 (2) x(n)=-3δ(n+4)-δ(n+3)+δ(n+2)+3δ(n+1)+6δ(n)
第 1 章 时域离散信号和时域离散系统
题8解图(一)
第 1 章 时域离散信号和时域离散系统
x(n)=-δ(n+2)+δ(n-1)+2δ(n-3)
h(n)=2δ(n)+δ(n-1)+ δ(n-2)
由于
x(n)*δ(n)=x(n)
1
x(n)*Aδ(n-k)=Ax(n-k)
2
故
第 1 章 时域离散信号和时域离散系统
y(n)=x(n)*h(n)
=x(n)*[2δ(n)+δ(n-1)+ δ(n-2) 1 2
, 这是2π有理1数4, 因此是周期序
3
(2) 因为ω=
,
所以
1
8
=16π, 这是无理数, 因此是非周期序列。
2π
第 1 章 时域离散信号和时域离散系统
4. 对题1图给出的x(n)要求:
(1) 画出x(-n)的波形;
数字信号处理第二章习题解答

数字信号处理第2章习题解答2.1 今对三个正弦信号1()cos(2)a x t t π=,2()cos(6)a x t t π=-,3()cos(10)a x t t π=进行理想采样,采样频率为8s πΩ=,求这三个序列输出序列,比较其结果。
画出1()a x t 、2()a x t 、3()a x t 的波形及采样点位置并解释频谱混淆现象。
解:采样周期为2184T ππ== 三个正弦信号采样得到的离散信号分别表示如下:1()cos(2)cos()42a n x n n ππ=⋅=2()cos(6)cos()42a n x n n ππ=-⋅=-3()cos(10)cos()42a n x n n ππ=⋅=输出序列只有一个角频率2π,其中1()a x n 和3()a x n 采样序列完全相同,2()a x n 和1()a x n 、3()a x n 采样序列正好反相。
三个正弦信号波形及采样点位置图示如下:tx a 1(t )tx a 2(t )tx a 3(t )三个正弦信号的频率分别为1Hz 、3Hz 和5Hz ,而采样频率为4Hz ,采样频率大于第一个正弦信号频率的两倍,但是小于后两个正弦信号频率的两倍,因而由第一个信号的采样能够正确恢复模拟信号,而后两个信号的采样不能准确原始的模拟信号,产生频谱混叠现象。
2.3 给定一连续带限信号()a x t 其频谱当f B >时,()a X f 。
求以下信号的最低采样频率。
(1)2()a x t (2)(2)a x t (3)()cos(7)a x t Bt π 解:设()a x t 的傅里叶变换为()a X j Ω(1)2()a x t 的傅里叶变换为22()[()]Ba a BX j X j d ππωωω-⋅Ω-⎰因为22,22B B B B πωππωπ-≤≤-≤Ω-≤ 所以44B B ππ-≤Ω≤即2()a x t 带限于2B ,最低采样频率为4B 。
数字信号处理第2章答案
=
系统的零点为z=0, 极点为z=0.9, 零点在z平面的原点,
不影响频率特性, 而惟一的极点在实轴的0.9处, 因此滤波 器的通带中心在ω=0处。 毫无疑问, 这是一个低通滤波器。
[例2.4.2]假设x(n)=xr(n)+jxi(n), xr(n)和xj(n)为实序列, X(z)=ZT[x(n)]在单位圆的下半部分为零。 已知
N 1
( z 1)
z
1
2 N 1
z 1 z 1
N
2
[例2.4.4]
时域离散线性非移变系统的系统函数H(z)为
1 ( z a )( z b )
H (z)
,
a 和 b 为常数
第2章
时域离散信号和系统的频域分析
(1) 要求系统稳定, 确定a和b的取值域。
第2章
时域离散信号和系统的频域分析
2.3 分析信号和系统的频率特性
求信号与系统的频域特性要用傅里叶变换。 但分析频 率特性使用Z变换却更方便。 我们已经知道系统函数的极、
零点分布完全决定了系统的频率特性, 因此可以用分析极、
零点分布的方法分析系统的频率特性, 包括定性地画幅频 特性, 估计峰值频率或者谷值频率, 判定滤波器是高通、 低通等滤波特性, 以及设计简单的滤波器(内容在教材第5 章)等。
Re[X(ejω)]=X(ejω) Im[X(ejω)]=0 [例2.4.3] 已知 0≤n≤N N+1≤n≤2N n<0, 2N<n
n x(n) 2 N n 0
求x(n)的Z变换。
第2章
时域离散信号和系统的频域分析
解: 题中x(n)是一个三角序列, 可以看做两个相同的矩
西安电子(高西全丁美玉第三版)数字信号处理课后答案第2章
这是时域卷积定理。
第2章 时域离散信号和系统的频域分析
(5) 若y(n)=x(n)h(n), 则
Y (e j ) 1 H (e j ) X (e j ) 2π
这是频域卷积定理或者称复卷积定理。
(6)
xe
(n)
1 2
[x(n)
滤波器是高通还是低通等滤波特性, 也可以通过分析极、 零点分布确定, 不必等画出幅度特性再确定。 一般在最靠近 单位圆的极点附近是滤波器的通带; 阻带在最靠近单位圆的 零点附近, 如果没有零点, 则离极点最远的地方是阻带。 参 见下节例2.4.1。
第2章 时域离散信号和系统的频域分析
2.4 例
[例2.4.1] 已知IIR数字滤波器的系统函数
c (Rx , Rx )
这两式分别是序列Z变换的正变换定义和它的逆Z变 换定义。
第2章 时域离散信号和系统的频域分析
(8)
x(n) 2 1
X (e j ) 2d
n
2π 2
x(n) y(n) 1
n
2π
c
X
(v)Y
(
1 v
)
dv v
max[Rx ,
H(z) 1 1 0.9z 1
试判断滤波器的类型(低通、 高通、 带通、 带阻)。 (某
解: 将系统函数写成下式:
H(z) 1 = z 1 0.9z 1 z 0.9
第2章 时域离散信号和系统的频域分析
系统的零点为z=0, 极点为z=0.9, 零点在z平面的原点, 不影响频率特性, 而惟一的极点在实轴的0.9处, 因此滤波 器的通带中心在ω=0处。 毫无疑问, 这是一个低通滤波器。
数字信号处理-时域离散随机信号处理(丁玉美)第2章
rxx (0) rxx (0) Rxx r ( M 1) xx
第二章 维纳滤波和卡尔曼滤波 (2.2.22)式可以写成矩阵的形式, 即
Rxd Rxxh
对上式求逆,得到
h Rxx1Rxd
(2.2.23)
(2.2.24)
第二章 维纳滤波和卡尔曼滤波 上式表明已知期望信号与观测数据的互相关函数及观测 数据的自相关函数时,可以通过矩阵求逆运算, 得到维纳滤
E[| e(n) |2 ] E[| e(n) |2 ] j 0 a j b j
记
j=0, 1, 2, … (2.2.6)
j j a j b j
j=0, 1, 2, …
(2.2.7)
第二章 维纳滤波和卡尔曼滤波 则(2.2.6)式可以写为
j E[| e(n) |2 ] 0
j 0
(2.2.16)
假定滤波器工作于最佳状态,滤波器的输出yopt(n)与期望信号d(n) 的误差为eopt(n),把(2.2.15)式代入上式,得到
* E[ yopt (n)eopt (n)] 0
(2.2.17)
第二章 维纳滤波和卡尔曼滤波
d(n) eo pt(n)
yo pt(n)
图 2.2.1 期望信号、 估计值与误差信号的几何关系
方法求解,简单易行,具有一定的工程实用价值,并且物理概
念清楚,但不能实时处理;维纳滤波的最大缺点是仅适用于一 维平稳随机信号。这是由于采用频域设计法所造成的, 因此人 们逐渐转向在时域内直接设计最佳滤波器的方法。
第二章 维纳滤波和卡尔曼滤波
2.2 维纳滤波器的离散形式——时域解
2.2.1 维纳滤波器时域求解的方法 根据线性系统的基本理论,并考虑到系统的因果性,可以 得到滤波器的输出y(n),