第六章二系悬挂.pdf
CRH2型动车组转向架二系悬挂装置

CRH2型动车组转向架二系悬挂装置5.6.1结构布置及特点CRH2型动车组转向架二系悬挂装置主要由空气弹簧系统、牵引装置、横向减振器、抗蛇行减振器及横向缓冲橡胶止挡等零部件组成,如图5.22所示。
每辆车体及其以上所有重量通过4个空气弹簧传递给两个转向架,纵向力(牵引力或制动力)由单牵引拉杆传递,而横向力则由空气弹簧和横向缓冲橡胶止挡共同传递。
空气弹簧是车体与转向架之间的重要悬挂元件,主要作用除支承车体载荷外,还可以隔离转向架构架的振动,并在通过曲线过程中通过变位实现车体与转向架间的相对旋转和横移。
因此,空气弹簧是二系悬挂中的关键零部件,是影响车辆运行平稳性的关键因素。
5.6.2空气弹簧装置空气弹簧装置主要包括空气弹簧及其附属的高度调整阀、调整阀保温箱及差压阀等。
空气弹簧采用自由膜式气囊,与下部的叠层橡胶堆组成一体。
该空气弹簧的特点:(1)垂向变形由空气弹簧本体(即气囊)和其下面的叠层橡胶堆共同承担,确保垂向大变形量;(2)在水平方向,一方面利用叠层橡胶堆进一步降低刚性,另一方面通过改变气囊形状,可以产生一定的阻尼,以改善乘坐舒适性。
5.6.2.1工作原理一般空气弹簧装置由列车主风管、T形支管、截断塞门、滤尘止回阀、空气弹簧贮风缸、连接软管、高度控制阀、空气弹簧本体、差压阀和附加空气室等组成,空气弹簧系统工作原理(即压力空气传递过程)见图5.23。
压力空气由列车主风管1→高度阀截断塞门3→高度控制阀4→空气弹簧截断塞门2→空气弹簧5→节流阀8→附加空气室7。
5.6.2.2空气弹簧结构空气弹簧主要由橡胶气囊、上下盖板、橡胶堆等零部件组成,如图5.24所示。
空气弹簧采用上进气设计,压缩空气经过高度调整阀进人橡胶气囊和构架内腔形成的附加空气室,橡胶气囊和附加空气室间设直径为φ14mm的节流孔,空气通过节流孔时产生的节流效应构成二系悬挂的垂向阻尼。
当空气弹簧上盖板相对于底座产生垂向位移时,空气弹簧内的气体容积发生变化,引起压力的变化。
第六章 第2讲 动能和动能定理-2025届高中物理

第六章机械能第2讲动能和动能定理课标要求核心考点五年考情核心素养对接1.理解动能和动能定理.2.能用动能定理解释生产生活中的现象.动能和动能定理的基本应用2023:新课标T15,山东T15;2022:上海T19;2020:浙江1月T20;2019:北京T24,天津T101.物理观念:理解动能和动能定理,会用动能定理分析问题.2.科学思维:利用功的表达式、牛顿第二定律与运动学公式推出动能定理的表达式.3.科学探究:通过对动能定理的学习,探索功与动能的关系.4.科学态度与责任:能用动能定理解决实际问题,激发学习兴趣,提高应用能力.动能定理与图像的综合应用2023:新课标T20;2022:江苏T8;2021:湖北T4;2020:江苏T4;2019:全国ⅢT17命题分析预测动能和动能定理是历年高考的热点,题型为选择题或计算题,命题背景可能是生产生活、体育运动等实际情境.预计2025年高考可能会结合图像或实际问题考查动能和动能定理相关知识.考点1动能定理的理解和基本应用1.动能定义物体由于运动而具有的能叫动能公式E k =[1]12mv 2.单位为焦耳,1J =1N·m =1kg·m 2/s 2标矢性动能是[2]标量,只有正值状态量动能是状态量,因为v 是瞬时速度2.动能定理内容力在一个过程中对物体做的功,等于物体在这个过程中[3]动能的变化表达式W =[4]12m v 22-12m v 12或W =E k2-E k1物理意义[5]合力做的功是物体动能变化的量度适用条件①既适用于直线运动,也适用于[6]曲线运动②既适用于恒力做功,也适用于[7]变力做功③力可以是各种性质的力,既可以同时作用,也可以[8]间断作用如图,一架喷气式飞机,质量m 为7.0×104kg ,起飞过程中从静止开始滑跑.当位移l 达到2.5×103m 时,速度达到起飞速度80m/s .在此过程中,飞机受到的平均阻力是飞机所受重力的150,g 取10m/s 2.(1)飞机起飞时的动能是2.24×108J.(2)此过程飞机的动能变化量是2.24×108J.(3)飞机的平均牵引力是 1.036×105N.解析(1)E k=12mv 2=2.24×108J(2)ΔE k =E k -E k0=2.24×108J(3)在此过程中对飞机由动能定理可知F 牵l -150mgl =12mv 2-0,解得飞机的平均牵引力F牵=1.036×105N.命题点1动能定理的理解1.[直线运动中动能定理的理解]如图,某同学用绳子拉动木箱,使它从静止开始沿粗糙水平路面运动至具有某一速度.木箱获得的动能一定(A)A.小于拉力所做的功B.等于拉力所做的功C.等于克服摩擦力所做的功D.大于克服摩擦力所做的功解析由动能定理有W F-W f=E k-0,可知木箱获得的动能一定小于拉力所做的功,故A正确.2.[曲线运动中动能定理的理解]滑雪运动深受人民群众喜爱.如图所示,某滑雪运动员(可视为质点)由坡道进入竖直面内的圆弧形滑道AB,从滑道的A点滑行到最低点B的过程中,由于摩擦力的存在,运动员的速率不变,则运动员沿AB下滑过程中(C)A.所受合力始终为零B.所受摩擦力大小不变C.合力做功一定为零D.机械能始终保持不变解析运动员做匀速圆周运动,所受合力指向圆心,故A错误;由动能定理可知,合力做功一定为零,故C正确;运动员所受滑动摩擦力大小随运动员对滑道压力大小的变化而变化,故B错误;运动员动能不变,重力势能减少,所以机械能减少,故D错误.命题拓展命题条件不变,一题多设问运动员沿AB下滑过程中(C)A.重力做的功大于摩擦力做的功B.运动员的动能变化量大于摩擦力做的功C.支持力不做功D.运动员的加速度为零解析运动员下滑过程中速率不变,由动能定理可知重力做的功等于摩擦力做的功,故A 错误;运动员的动能没有变化,动能变化量小于摩擦力做的功,故B错误;运动员做圆周运动,支持力不做功,故C正确;运动员做匀速圆周运动,加速度不为零,故D错误.命题点2动能定理的简单计算3.[动能定理在选择题中的简单计算/2024河北石家庄模拟]“转碟”是传统的杂技项目,如图所示,质量为m的发光物体(可看作质点)放在半径为r的碟子边缘,杂技演员用杆顶住碟子中心A,使发光物体随碟子一起在水平面内绕A点转动,角速度从0增大至ω的过程中,发光物体始终相对碟子静止.已知发光物体与碟子间的动摩擦因数为μ、重力加速度为g,此过程发光物体所受的摩擦力(D)A.方向始终指向A点B.大小始终为μmgC.做的功为12mωrD.做的功为12mω2r2解析角速度从0增大至ω的过程中,发光物体的线速度逐渐增大,可知发光物体有切向加速度,摩擦力等于发光物体所受的合力,提供发光物体切向加速度和向心加速度,可知摩擦力方向不是始终指向A 点,故A 错误;角速度从0增大至ω的过程中,发光物体未发生滑移,所受摩擦力小于等于最大静摩擦力,发光物体做圆周运动所需的向心力在增大,切线方向的合力在变化,故发光物体所受摩擦力大小不是始终为μmg ,故B 错误;根据动能定理有摩擦力做的功为W =12mv 2-0=12mω2r 2,故C 错误,D 正确.4.[动能定理在计算题中的简单计算/2024陕西西安模拟]如图,用打夯方式夯实地面的过程可简化为:两人通过绳子对重物同时施加大小相等、方向与竖直方向成37°角的力F ,使重物恰好脱离水平地面并保持静止,然后突然一起发力使重物升高0.4m 后立即停止施力,重物继续上升0.05m ,最后重物自由下落把地面砸深0.05m.已知重物的质量为40kg ,取重力加速度g =10m/s 2,sin37°=0.6,cos37°=0.8.忽略空气阻力,求:(1)F 的大小;(2)从两人停止施力到重物恰好接触地面的时间;(3)地面对重物的平均阻力的大小.答案(1)250N(2)0.4s(3)4000N解析(1)重物处于平衡状态,则有2F cos37°=mg代入数据解得F =250N.(2)设停止施力时,重物的速度为v ,发力使重物上升的高度为h 1,停止发力后重物继续上升的高度为h 2,从两人停止施力到重物恰好接触地面所经历的时间为t ,则有v 2=2gh 2vt -12gt 2=-h 1联立解得t =0.4s .(3)设地面对重物的平均阻力为f ,重物落地后把地面砸深h 3,重物从最高点到最低点的过程,由动能定理有mg (h 1+h 2+h 3)-fh 3=0解得f =4000N.方法点拨动能定理的使用及注意事项应用动能定理解题应抓住“两状态,一过程”“两状态”即明确研究对象的始、末状态的速度或动能情况“一过程”即明确研究过程,确定在这一过程中研究对象的受力情况和位置变化或位移信息注意事项(1)动能定理中的位移和速度必须是相对于同一个参考系的,一般以地面或相对地面静止的物体为参考系(2)当物体的运动包含多个不同过程时,可分段应用动能定理求解,也可以对全过程应用动能定理求解(3)动能是标量,动能定理是标量式,解题时不能分解动能命题点3利用动能定理求变力做功5.[动能定理求变化的摩擦力做功]如图,一半径为R、粗糙程度处处相同的半圆形轨道竖直固定放置,直径POQ水平.一质量为m的质点自P点上方高度R处由静止开始下落,恰好从P点进入轨道.质点滑到轨道最低点N时,对轨道的压力为4mg,g为重力加速度的大小.用W表示质点从P点运动到N点的过程中克服摩擦力所做的功.则(C)A.W=12mgR,质点恰好可以到达Q点B.W>12mgR,质点不能到达Q点C.W=12mgR,质点到达Q点后,继续上升一段距离D.W<12mgR,质点到达Q点后,继续上升一段距离解析根据牛顿第二定律得4mg-mg=m2,解得质点运动至半圆形轨道最低点时的速度v N =3B,从质点由静止释放到运动至最低点N,根据动能定理得mg·2R-W=12m2-0,解得W=12mgR.从P到N和从N到Q,分析可知相同高度处,从N到Q过程的速率较小,支持力较小,对应的滑动摩擦力较小,故从N到Q过程中质点克服摩擦力做的功W'较小,即W>W'.从N到Q利用动能定理得E k Q-12m2=-mgR-W',解得E k Q=12m2-mgR-W'=12mgR-W'>0,所以质点到达Q点后,还能继续上升一段距离,故C正确,A、B、D错误.6.[动能定理求变化的弹力做功]如图所示,在轻弹簧的下端悬挂一个质量为m的小球A,若将小球A从弹簧原长位置由静止释放,小球A能够下降的最大高度为h.若将小球A换为质量为2m的小球B,仍从弹簧原长位置由静止释放,则小球B下降h时的速度为(重力加速度为g,不计空气阻力,弹簧在弹性限度内)(B)A.2KB.KC.K2D.0解析小球A下降h过程,根据动能定理,有mgh-W=0,小球B下降h过程,根据动能弹=12×2mv2-0,联立解得v=K,故B正确.定理,有2mgh-W弹考点2动能定理与图像的综合应用五类图像中所围“面积”或斜率的意义对下列相关图像的说法进行判断.(1)W -x 图线的斜率表示的是W 对应的力F .(√)(2)E k -x 图线的斜率表示的是物体所受的拉力.(✕)(3)P -t 图线与坐标轴围成的面积表示物体的动能增加量.(✕)(4)F -x 图线与坐标轴围成的面积表示物体的动能增加量.(✕)命题点1E k -x 图像7.[2024湖北武汉摸底/多选]我国民用无人机技术发展迅速,目前已占据全球市场一半以上,某品牌无人机出厂前进行竖直飞行测试,无人机发动机启动一段时间后关闭,再经一小段时间上升到最高点.该过程无人机的动能E k 随上升高度h 的关系如图所示.已知无人机发动机提供的升力大小恒定,空气阻力恒为重力的四分之一.则下列结论正确的有(ACD)A.无人机的升力大小为75NB.空气阻力的大小为40NC.无人机的重力大小为40ND.加速与减速的加速度大小之比为1:2解析由动能E k 与上升高度h 的关系图,可知图像斜率绝对值表示合力的大小,故加速阶段的合力大小为F 合=F 升-mg -f =502N =25N ,减速阶段的合力大小为F'合=mg +f =501N =50N,又f=0.25mg,联立解得F升=75N,f=10N,mg=40N,故A、C正确,B错误;根据牛顿第二定律可知,加速与减速的加速度大小之比为='=2550=12,故D正确.命题点2F-x图像8.[多选]在某一粗糙的水平面上,一质量为2kg的物体在水平恒定拉力的作用下做匀速直线运动,当运动一段时间后,拉力逐渐减小,且当拉力减小到零时,物体刚好停止运动,图中给出了拉力随位移变化的关系图像.已知重力加速度g=10m/s2.根据以上信息能精确得出或估算得出的物理量有(ABC)A.物体与水平面间的动摩擦因数B.合力对物体所做的功C.物体做匀速运动时的速度D.物体运动的时间解析物体做匀速直线运动时,拉力F与滑动摩擦力f大小相等,物体与水平面间的动摩擦因数为μ=B=0.35,故A正确;减速过程中,由动能定理得W F+W f=0-12mv2,根据F-x 图像中图线与坐标轴围成的面积可以估算拉力F做的功W F,而W f=-μmgx,由此可求得合力对物体所做的功及物体做匀速运动时的速度v,故B、C正确;因为物体做变加速运动,所以运动时间无法求出,故D错误.命题点3其他图像9.放在粗糙水平面上的物体受到水平拉力的作用,在0~6s内其速度与时间的关系图像和该拉力的功率与时间的关系图像分别如图甲、乙所示,下列说法正确的是(C)图甲图乙A.0~6s内物体位移大小为36mB.0~6s内拉力做的功为30JC.合力在0~6s内做的功与0~2s内做的功相等D.滑动摩擦力大小为5N解析v-t图线与t轴围成的面积表示位移,结合题图甲可知,0~6s内物体的位移大小为30m,故A错误;P-t图线与t轴围成的面积表示拉力做的功,结合题图乙可得,0~6s内拉力做的功为70J,故B错误;0~6s内与0~2s内动能变化量相等,由动能定理可知,合力做的功相等,故C正确;由题图甲知物体在2~6s内做匀速直线运动,此时拉力等于滑动摩擦力,结合题图乙,得F==53N,故D错误.方法点拨解决动能定理与图像问题的基本步骤1.[v-t+F-t图像/2023福建/多选]甲、乙两辆完全相同的小车均由静止沿同一方向出发做直线运动.以出发时刻为计时零点,甲车的速度—时间图像如图(a)所示,乙车所受合力—时间图像如图(b)所示.则(BC)A.0~2s内,甲车的加速度大小逐渐增大B.乙车在t=2s和t=6s时的速度相同C.2~6s内,甲、乙两车的位移不同D.t=8s时,甲、乙两车的动能不同解析v-t图像中图线的斜率表示加速度,由图(a)可知0~2s内甲车的加速度大小不变,选项A错误;F-t图像中图线与横轴围成的面积表示动量的变化量,由图(b)可知2~6s内乙车的动量变化量为零,所以t=2s和t=6s时速度相同,选项B正确;在v-t图像中图线与横轴围成的面积表示位移,在2~6s内,由图(a)得甲车位移为零,将图(b)转换为v-t图像,如图(c),可知乙车位移不为零,选项C正确;由图(a)、图(c)可得,当t=8s时,甲、乙两车速度均为零,选项D错误.2.[Ek-x图像/2022江苏]某滑雪赛道如图所示,滑雪运动员从静止开始沿斜面下滑,经圆弧滑道起跳.将运动员视为质点,不计摩擦力及空气阻力.此过程中,运动员的动能E k与水平位移x的关系图像正确的是(A)解析3.[W-L图像/多选]质量为2kg的物体,与水平面间的动摩擦因数μ=0.1,在水平拉力的作用下由静止开始运动,水平拉力做的功W和物体发生的位移L之间的关系如图所示,重力加速度g取10m/s2,则此物体(BD)A.在位移L=9m时的速度大小是33m/sB.在位移L=9m时的速度大小是3m/sC.在OA段运动的加速度大小是2.5m/s2D.在OA段运动的加速度大小是1.5m/s2解析由图像可知当L=9m时,W=27J,而W f=-μmgL=-18J,由动能定理有W合=W+W f=12mv2,解得v=3m/s,故A错误,B正确;在A点时,W'=15J,W'f=-μmgL'=-6J,由动能定理可得W'+W'f=12m2,解得v A=3m/s,则a=22'=1.5m/s2,故C错误,D正确.4.[动能的分析/2023山东]电磁炮灭火消防车(图甲)采用电磁弹射技术投射灭火弹进入高层建筑快速灭火.电容器储存的能量通过电磁感应转化成灭火弹的动能,设置储能电容器的工作电压可获得所需的灭火弹出膛速度.如图乙所示,若电磁炮正对高楼,与高楼之间的水平距离L=60m,灭火弹出膛速度v0=50m/s,方向与水平面夹角θ=53°,不计炮口离地面高度及空气阻力,取重力加速度大小g=10m/s2,sin53°=0.8.(1)求灭火弹击中高楼位置距地面的高度H;(2)已知电容器储存的电能E=12CU2,转化为灭火弹动能的效率η=15%,灭火弹的质量为3kg,电容C=2.5×104μF,电容器工作电压U应设置为多少?答案(1)60m(2)10002V解析(1)设灭火弹由炮口运动至高楼处的时间为t,则在水平方向上有L=v0cosθ·t在竖直方向上有H=v0sinθ·t-12gt2解得H=60m(2)根据题意可知E k=ηE=15%×12CU2又因为E k=12m02联立可得U=10002V.1.[2024江西万安中学校考]下列有关动能的变化说法正确的是(C)A.物体只有做匀速运动时,动能才不变B.物体做平抛运动时,水平方向速度不变,物体的动能也不变C.物体做自由落体运动时,重力做正功,物体的动能增加D.物体的动能变化时,速度不一定变化,速度变化时,动能一定变化解析物体做非匀速运动时,动能也可以不变.例如做匀速圆周运动的物体,其动能不变,故A错误;物体做平抛运动时,水平方向速度不变,竖直方向速度一直增加,其动能一直增加,故B错误;物体做自由落体运动时,重力做正功,物体的动能增加,故C正确;根据E k=12mv2可知物体的动能变化时,速度一定变化,速度是矢量,大小不变,方向变化时,动能是不变的,故速度变化时,动能不一定变化,故D错误.2.质量不等,但有相同动能的两个物体,在动摩擦因数相同的水平地面上滑行,直至停止,则(B)A.质量大的物体滑行的距离大B.质量小的物体滑行的距离大C.它们滑行的距离一样大D.它们克服摩擦力所做的功不相等解析由动能定理可得-F f x=0-E k,即μmgx=E k,由于动能相同,动摩擦因数相同,故质量小的物体滑行的距离大,它们克服摩擦力所做的功都等于E k,故B正确.3.[2023新课标]无风时,雨滴受空气阻力的作用在地面附近会以恒定的速率竖直下落.一质量为m的雨滴在地面附近以速率v下落高度h的过程中,克服空气阻力做的功为(重力加速度大小为g)(B)A.0B.mghC.12mv2-mghD.12mv2+mgh解析结合题意可知,雨滴在地面附近下落过程做匀速运动,对雨滴下落高度h的过程分析,由动能定理有mgh-W f=0,即W f=mgh,B正确,A、C、D错误.4.如图所示,固定在竖直平面内的14圆弧轨道与水平轨道相切于最低点B,质量为m的小物块从圆弧轨道的顶端A由静止滑下,经过B点后沿水平轨道运动,并停在到B点距离等于圆弧轨道半径的C点.圆弧轨道粗糙,物块与水平轨道间的动摩擦因数为μ,重力加速度大小为g.物块到达B点前瞬间对轨道的压力大小为(C)A.2μmg B.3mgC.(1+2μ)mgD.(1+μ)mg解析设圆弧轨道的半径为r,物块从B到C的过程,由动能定理得-μmgr=0-12m2,在B 点,由牛顿第二定律得N-mg=m2,联立解得N=(1+2μ)mg,由牛顿第三定律可知,物块到达B点前瞬间对轨道的压力大小为N'=N=(1+2μ)mg,故C正确.5.[图像创新/2024安徽名校联考]如图甲所示,光滑斜面倾角θ=30°,以斜面底端为坐标原点,沿斜面方向建立x轴.一质量为2kg的物体(视为质点)在沿斜面方向的拉力作用下,从斜面底端由静止开始沿x轴正方向运动,拉力做的功W与物体坐标x的关系如图乙所示.重力加速度g=10m/s2,斜面足够长.物体沿x轴正向运动过程中,下列说法正确的是(C)A.物体沿斜面向上运动的最大位移为22mB.物体沿斜面向上运动的时间为4sC.在x=5m时,拉力的功率为1002WD.拉力的最大功率为300W解析由于拉力沿斜面方向,则拉力做的功为W=Fx,可看出W-x图像的斜率大小代表拉力大小F.则对物体由O点运动到x=5m的过程,根据动能定理有,W1-mg sinθ·x1=12m12,结合题图乙可解得物体的速度v1=52m/s,在x=5m时,拉力F1=ΔΔ=20N,则此时拉力的功率P1=F1v1=1002W,故C正确.物体运动到x=10m时,拉力的功率最大,则对物体由O点运动到x=10m的过程,设运动的时间为t1,根据动能定理和运动学公式有W2-mg sinθ·x2=12m22,x2=22t1,结合题图乙可解得v2=10m/s,t1=2s,则此时拉力的功率P2=F1v2=200W,故D错误.对物体由x=10m处向上运动到最高点的过程,设运动的时间为t2,受到的拉力F2=Δ'Δ'=2N,由牛顿第二定律有mg sinθ-F2=ma1,解得物体的加速度a1=4m/s2,运动的时间t2=21=2.5s,该过程运动的位移x3=22t2=12.5m,则物体沿斜面向上运动的最大位移x max=x2+x3=22.5m,故A错误.物体沿斜面向上运动的总时间为t=t1+t2=4.5s,B错误.6.[多选]如图所示,一内壁粗糙程度相同、半径为R的圆筒固定在竖直平面内,圆筒内一质量为m的小球沿筒壁做圆周运动.若小球从最低点算起运动一圈又回到最低点的过程中,两次在最低点时筒壁对小球的弹力大小分别为10mg和8mg.设小球在该过程中克服摩擦力做的功为W,经过最高点时筒壁对小球的弹力大小为F,重力加速度为g,则(BD)A.W=2mgRB.W=mgRC.3mg<F<4mgD.2mg<F<3mg解析对小球进行受力分析,先后两次在最低点所受的合力分别为9mg和7mg,方向指向圆心.设小球先后两次经过最低点的速率分别为v1和v2,根据牛顿第二定律有9mg=B12和7mg=B22,小球在整个过程中,由动能定理得-W=12m22−12m12,联立解得W=mgR,故A 错误,B正确;小球在上升和下降过程中的等高处,由于上升过程中的速度大于下降过程中的速度,所以上升时所需向心力大于下降时所需向心力,故上升时筒壁对小球的弹力大于下降时筒壁对小球的弹力,因此上升时受到的摩擦力较大,而下降时受到的摩擦力较小,故上升时克服摩擦力做功W1>2,下降时克服摩擦力做功W2<2,设小球上升到最高点时的速度为v3,筒壁对小球的弹力满足F+mg=B32,上升过程由能量守恒定律得12m12=12m32+2mgR+W1,解得F<3mg,由W1<W,解得F>2mg,故C错误,D正确.7.如图(a)所示,一物块以一定初速度沿倾角为30°的固定斜面上滑,运动过程中摩擦力大小f恒定,物块动能E k与运动路程s的关系如图(b)所示.重力加速度大小取10m/s2,物块质量m和所受摩擦力大小f分别为(A)图(a)图(b)A.m=0.7kg,f=0.5NB.m=0.7kg,f=1.0NC.m=0.8kg,f=0.5ND.m=0.8kg,f=1.0N解析0~10m内物块上滑,由动能定理得-mg sin30°·s-fs=E k-E k0,整理得E k=E k0-(mg sin 30°+f)s,结合0~10m内的图像得,斜率的绝对值|k|=mg sin30°+f=4N;10~20m 内物块下滑,由动能定理得(mg sin30°-f)(s-s1)=E k,整理得E k=(mg sin30°-f)s-(mg sin30°-f)s1,结合10~20m内的图像得,斜率k'=mg sin30°-f=3N,联立解得f=0.5N、m=0.7 kg,故A正确,B、C、D错误.8.[多选]如图所示为一滑草场.某条滑道由上下两段高均为h、与水平面数均为μ.质量为m的载人滑草车从坡顶由静止开始自由下滑,经过上、下两段滑道后,最后恰好静止于滑道的底端(不计载人滑草车在两段滑道交接处的能量损失,重力加速度大小为g,sin37°=0.6,cos37°=0.8),则(AB)A.动摩擦因数μ=67B.载人滑草车最大速度为2K7C.载人滑草车克服摩擦力做功为mghD.载人滑草车在下段滑道上的加速度大小为35g解析对载人滑草车从坡顶由静止开始滑到底端的全过程分析,由动能定理可知mg·2h-μmg cos45°·ℎsin45°-μmg cos37°·ℎsin37°=0,解得μ=67,故A正确;滑草车通过上段滑道末端时速度最大,根据动能定理有mgh-μmg cos45°·ℎsin45°=12m m2,解得v m=2K7,故B正确;载人滑草车克服摩擦力做功为2mgh,故C错误;载人滑草车在下段滑道上的加速度为a=Bsin37°−Bvos37°=-335g,故加速度大小为335g,故D错误.9.[2023江苏]滑块以一定的初速度沿粗糙斜面从底端上滑,到达最高点B 后返回到底端.利用频闪仪分别对上滑和下滑过程进行拍摄,频闪照片示意图如图所示.与图乙中相比,图甲中滑块(C)A.受到的合力较小B.经过A 点的动能较小C.在A 、B 之间的运动时间较短D.在A 、B 之间克服摩擦力做的功较小解析设斜面倾角为θ、滑块与斜面间的动摩擦因数为μ,对滑块受力分析有F 合上=mg sin θ+μmg cos θ,F 合下=mg sin θ-μmg cos θ,故图甲中滑块受到的合力较大,A 错;滑块由A到B 的过程,有2a 上x AB =上2,由B 到A 的过程,有2a 下x AB =下2,又F 合上>F 合下,则a 上>a 下,故v A 上>v A 下,图甲中滑块经过A 点的动能较大,B 错;将滑块由A 到B 的过程逆向思维为由B 到A 的初速度为0、加速度大小为a 上的匀加速运动,则x AB =12a 上上2,又x AB =12a 下下2,a 上>a 下,故t 上<t 下,即图甲中滑块在A 、B 之间的运动时间较短,C 对;上滑和下滑过程摩擦力大小相等,经过AB 的距离相等,根据W =fx 可知在A 、B 之间克服摩擦力做的功相等,D 错.10.[2023山东青岛统考/多选]如图甲所示,在水平面上建立正方向水平向左的一维坐标,质量为M =1kg 的木板在x =0位置时有水平向左、大小为4m/s 的初速度.长木板受到的水平拉力F 与其位移的关系如图乙所示.已知木板与地面的动摩擦因数为0.6,重力加速度大小g 取10m/s 2,关于木板在0~8m 内的运动,下列说法正确的是(ABD)A.长木板的最小速度为2m/sB.x =4m 时长木板的速度大小为4m/sC.2~6m 内,长木板动能的增量为15JD.x =6m 和x =8m 时的速度大小相等解析当拉力小于摩擦力时,木板减速,摩擦力f =μMg =6N ,根据题图乙可知2m 处拉力为6N ,所以2m 前木板减速,2m 后木板加速,2m 时速度最小,图线与坐标轴所围图形的面积代表拉力做的功,根据动能定理有12M min2−12M02=-fx0+0×02,解得v min=2 m/s,故A正确;在0~4m内,根据动能定理有12M12−12M02=-fx1+1×12,F1=12N,解得v1=4m/s,故B正确;在2~6m内,根据动能定理可知,长木板动能的增量ΔE k=6+122×2J+8+122×2J-6×(6-2)J=14J,故C错误;在6~8m内,合外力做的功W合=4+82×2J-6×2J=0,所以木板在x=6m和x=8m时的动能不变,速度大小相等,故D正确. 11.[2024四川绵阳江油中学校考/多选]一辆汽车以额定功率沿倾角不变的斜坡向下匀速行驶,速度为v1,牵引力为F1.现让该车沿该斜坡从静止开始向上匀加速行驶,达到额定功率时速度为v2,牵引力为F2,以后保持额定功率行驶,最终速度为v3,牵引力为F3.斜坡足够长,汽车所受阻力大小在向上和向下行驶时相同,则(AD)A.v1>v3>v2B.v1<v2<v3C.在向上匀加速行驶过程中,任意相等时间内,汽车动能变化相等D.F1<F3<F2解析设斜坡的倾角为θ,汽车向下匀速行驶时,有F1+mg sinθ-μmg cosθ=0,P=F1v1,汽车向上匀加速行驶时有F2-mg sinθ-μmg cosθ=ma,P=F2v2,汽车向上匀速行驶时,有F3-mg sinθ-μmg cosθ=0,P=F3v3,联立可得F1<F3<F2,v1>v3>v2,故A、D正确,B错误;在向上匀加速行驶过程中,任意相等时间内,汽车动能变化量ΔE k=12m(v+at)2-12mv2=2B+222m,故在向上匀加速行驶过程中,任意相等时间内,汽车动能变化不同,故C错误.12.[2024河北名校联考]如图1所示,一质量为0.4kg的小物体静止在水平台面上,在水平推力F的作用下从坐标原点O开始沿x轴运动,F与物体坐标x的关系如图2所示.在x=4m时撤去力F,同时物体从平台飞出,落到距离台面h=0.45m的水平地面上.物体与水平台面间的动摩擦因数为34,重力加速度g取10m/s2,不计空气阻力.求:(1)x=1m时,物体的加速度大小a;(2)x=2m时,力F的功率P;(3)物体落地点离平台的水平距离x'.答案(1)12.5m/s2(2)602W(3解析(1)由F-x图像知,在0~2m内有,F=(4+4x)N,x=1m时,F=8N滑动摩擦力f=μmg=34×0.4×10N=3N。
悬挂系统27159
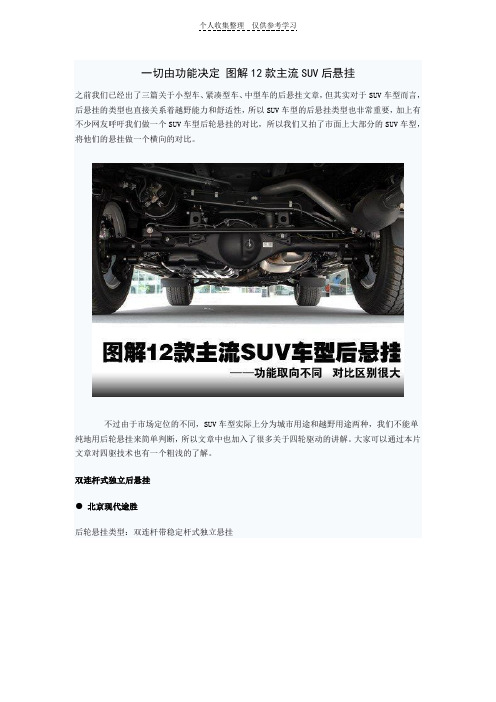
一切由功能决定图解12款主流SUV后悬挂之前我们已经出了三篇关于小型车、紧凑型车、中型车的后悬挂文章,但其实对于SUV车型而言,后悬挂的类型也直接关系着越野能力和舒适性,所以SUV车型的后悬挂类型也非常重要,加上有不少网友呼吁我们做一个SUV车型后轮悬挂的对比,所以我们又拍了市面上大部分的SUV车型,将他们的悬挂做一个横向的对比。
不过由于市场定位的不同,SUV车型实际上分为城市用途和越野用途两种,我们不能单纯地用后轮悬挂来简单判断,所以文章中也加入了很多关于四轮驱动的讲解。
大家可以通过本片文章对四驱技术也有一个粗浅的了解。
双连杆式独立后悬挂● 北京现代途胜后轮悬挂类型:双连杆带稳定杆式独立悬挂为什么先说双连杆式独立悬挂呢?因为我研究了所有拍到的SUV车型的后轮悬挂,没有发现比这种悬挂更“柔弱”的了。
途胜虽然是所谓独立悬挂,但双连杆仅仅是比凯越的连杆粗了一点点,而凯越在紧凑型车中可以说是垫底的车型,如此可见作为SUV车型,途胜的悬挂怎么样。
途胜的悬挂显然完全不是用来越野的,根本经受不起侧面的冲击力,所以只不过是一辆“升高悬挂的轿车”,更完全没有必要买四驱车型,也千万不要开着它去和别的车一起玩越野。
另外,狮跑因为是和途胜相同的平台,所以悬挂类型也是一样的。
●广汽丰田汉兰达后轮悬挂类型:双连杆式独立悬挂众所周知,汉兰达使用的是和中型车凯美瑞相同的底盘,那么他们的后轮悬挂类型是不是也一样呢?凯美瑞使用的双连杆后悬在中型车中可有点拿不出手,汉兰达那么大块头,怎么也得比凯美瑞的后悬强一些吧?不过当我们看到汉兰达和凯美瑞一样粗细的双连杆时,一切疑问就都没有了,取而代之的是失望。
毫无疑问,这么细的连杆根本不能指望它来抵御越野时强大的侧向冲击力,一次弹跳甚至都有可能让它的双连杆彻底变形,更不要说别的高难度越野动作了。
这样的悬挂只有一种好处:在市区里行走的时候很轻盈,悬挂的感觉很软很舒适。
如果必须要找汉兰达的一些优点的话,那么唯一值得一说的就是全系标配的HAC上坡辅助,不过一定要记得:这个功能是电脑系统的功劳,和汉兰达羸弱的底盘功力没有任何关系。
汽车悬挂系统结构原图解汇总

Part Five
悬挂系统的发展趋 势
空气悬挂系统
空气悬挂系统是一种利用空气弹簧 和减震器组成的悬挂系统,能够根 据车辆载重和行驶状态自动调整高 度和阻尼,提高行驶舒适性和稳定 性。
空气悬挂系统的优点包括提高乘坐 舒适性、提高行驶稳定性、降低油 耗等,因此受到广泛欢迎。
添加标题
添加标题
添加标题
添加标题
Part Three
悬挂系统的类型
独立悬挂
定义:独立悬挂是指每一侧的车轮通过 弹性悬挂系统单独连接在车架或车身下 方,使两侧车轮可以独立地运动而不互 相干扰。
类型:常见的独立悬挂系统包括麦弗逊悬 挂、双叉臂悬挂、多连杆悬挂等。
优点:提高汽车的操控性和舒适性,减少 车身的振动和噪音,增加轮胎的抓地力, 提高行驶安全性。
麦弗逊悬挂结构原理解析
组成:由下控制臂、弹簧、减震器和转向节等部件组成
作用:提供车辆横向和纵向支撑,吸收来自路面的震动,提高行驶稳定性 工作原理:通过下控制臂和减震器的组合作用,实现车轮的上下运动和转 向功能 特点:结构简单,占用空间较小,适合用于前驱车和横置发动机车型
多连杆悬挂结构原理解析
组成:由连杆、减震器和弹簧等部件组成 作用:通过连杆的连接,使车轮与车身保持恒定的接触状态,减少车身的 振动和侧倾 优点:能够更好地控制车轮的运动轨迹,提高车辆的操控性和舒适性
弹性元件:缓冲和减震作用
导向机构:传递车轮与车身之间的 力和扭矩
添加标题
添加标题
添加标题
添加标题
减震器:吸收震动能量,减少车身 震动
悬挂系统还包括横向稳定杆、纵向 稳定杆等辅助部件
悬挂系统的作用
连接车轮与车身,传递力矩和载荷 缓冲减震,提高乘坐舒适性 维持车身姿态稳定,保证车辆操控性能 吸收和衰减振动和冲击,提高行驶平顺性
汽车电子控制技术 第2版 教学课件 ppt 作者 周云山 第六章 电子控制悬架
电子空气悬架:用低 刚度的气囊式空气弹 簧代替大刚度机械弹 簧,根据车载质量的 变化,自动调节车身 高度。
电子空气悬架是基于汽车的行驶状态(如制动、加速、转 向等)和装载质量来调节阻尼力和刚度,是有级的非实时调节 过程,对执行机构的响应速度不高,消耗的能量极低。故从工 作方式来看,电子空气悬架实际上是车身高度可调、汽车运动 状态突变时可实现姿态调节的被动悬架。
H T1
1.0
H Xr ~ Xs
悬架平顺性和轮胎接地传递函数的理想幅频特性如图6-10 所示。对于悬架的动挠度,由于汽车结构的限制,悬架最大动 挠度非常有限,理想幅频特性是不可能实现的。
二、方均根值评价法
由路面冲击引起悬架的变形,用传递函数表示为
xs ( s) xt ( s) H d ( s) xr ( s)
当传递函数确定以后,可得到相应的幅频特性函数,如
x s ( j ) H x r ~ x s ( j ) x r ( j ) xt ( j ) H tl ( j ) x r ( j )
半主动悬架:根据路面冲 击、车轮与车体的加速度、速 度及位移信号仅实时调节悬架 的阻尼系数。此方式消耗来自 不平路面的冲击能量,而不需 要提供能量。这种悬架在结构 上更接近传统的机械悬架。 主动悬架:根据路面冲击、车轮与车体的加速度、速度及位 移信号同时实时调节悬架的阻尼和刚度以及车身高度。此调节方 式由外部提供能量,结构相对复杂,工作原理如图6-7。
传递函数(幅频特性)评价法
方均根值评价法
常 用 的 几 种 车 体 简 化 模 型
一、传递函数(幅频特性)评价法
(1)平顺性传递函数
由路面冲击引起车体位移变化,用平顺性传递函数表示为
二系悬挂名词解释

二系悬挂名词解释
嘿,咱今儿来聊聊二系悬挂呀!你说这二系悬挂,就好比是一辆车的腿儿。
咱人走路得靠两条腿协调配合吧,车要跑得稳当也得靠这二系悬挂好好发挥作用呢!
想象一下,车在路上跑,要是没有个靠谱的悬挂,那不得颠得七荤八素的呀!二系悬挂呢,就负责让车在行驶过程中既能稳稳地抓住地面,又能灵活地应对各种路况。
它就像是一个神奇的魔术师,能把那些颠簸啊、晃动啊都给变没了。
你看啊,这二系悬挂里有各种零件,就像咱身体里的骨头、关节啥的,各自有着重要的职责。
弹簧就像有弹性的肌肉,能吸收震动;减震器呢,就像是个小卫士,把多余的晃动给消除掉。
它们相互配合,多默契呀!要是其中一个出了问题,那车开起来可就别扭啦,就好像咱走路一瘸一拐似的,多难受呀!
咱平时开车的时候,可能感觉不到二系悬挂在默默工作,但它可真的是功劳大大的呢!它让我们坐车的时候更舒服,开车的时候更安全。
要是没有它,那车开起来不就跟坐过山车似的,谁受得了呀!
你说这二系悬挂是不是很重要啊?它可不只是一些冷冰冰的零件,它是让车变得更好开、更舒适的关键呢!咱可得好好爱护它,就像爱护自己的身体一样。
定期检查检查,看看有没有啥问题,该保养就保养。
这样,它才能一直好好地为我们服务呀!所以说啊,别小看了这二系悬挂,它可是车的重要组成部分呢!没有它,车可就没法好好跑啦!。
二系悬挂装置名词解释
二系悬挂装置名词解释1.引言1.1 概述本文旨在对二系悬挂装置进行解释和说明。
二系悬挂装置作为一种重要的工程技术装置,广泛应用于交通、建筑、机械工程等领域。
它通过一系列的结构组成,能够在两个或多个点之间提供支撑和悬挂的功能。
悬挂装置在现代工程领域起到了至关重要的作用。
最常见的例子就是桥梁悬索,通过将悬索和桥梁主体相连接,可以实现桥梁的悬挂和支撑。
除此之外,还有电力线路的悬挂装置、起重机悬挂装置等。
这些装置通过合理的结构和力学原理,能够承受相应的重量和强度,保证了工程的正常运行和安全性。
在本文中,我们将详细介绍二系悬挂装置的定义和原理。
首先,我们将给出一个准确的定义,解释二系悬挂装置的特点和功能。
接着,我们将深入探讨其工作原理和相应的力学模型,以了解其运作机制和性能表现。
此外,我们还将总结二系悬挂装置在工程领域的重要性,并展望其未来的发展方向。
随着科学技术的不断进步和工程领域的发展,对于二系悬挂装置的需求也将不断增加。
我们有理由相信,未来二系悬挂装置将会在设计、结构和材料等多方面有所创新和突破,以满足更加复杂和多样化的工程需求。
综上所述,本文将为读者提供关于二系悬挂装置的详细解释和说明。
通过阅读本文,读者能够对二系悬挂装置有一个全面的认识,理解其定义、工作原理和重要性,并对其未来的发展方向有所了解。
让我们一起深入探索二系悬挂装置的奥秘!1.2 文章结构文章结构部分是对整篇文章的组织和安排进行描述,它有助于读者更好地理解和阅读文章。
以下是对文章结构部分的具体内容的描述:在本文中,将以二系悬挂装置为主题,通过对其定义和原理的解释,探讨其重要性以及未来发展的展望。
本文的结构分为引言、正文和结论三个部分。
引言部分将介绍本文的背景和目的。
在引言的开头,将对二系悬挂装置进行简单概述,以引起读者的兴趣。
接着,将详细介绍本文的结构,以便读者能够清晰地了解整篇文章的组织和内容。
最后,将明确本文的目的,即对二系悬挂装置进行解释和探讨。
第六章 二系悬挂

回转中心
(15+5)
±
牵引杆装置结构图
§4 摆式支承装置+旁承的连接装置
——韶山1型电力机车
一.位置
(如图示)
车体
二.组成
由中央支 承、复原 装置、旁 承和侧档 等组成
摇摆旁承
30±2mm
中央摆式支承
构架
摩擦旁承
弹性侧档
30±2mm
复原弹簧
韶山1型电力机车车体与转向架间的连接装置 ——中央摆式支承装置+旁承 结构示意图
CRH5 动力转向架
驱动装置 枕梁 动力轮对
构架
轴箱 二系悬挂 基础制 动装置 一系悬挂
非动力 轮对
横向减振器
CRH5二系悬挂系统
——两套抗侧滚扭杆装 置; 牵引中心销+“Z”字型 牵引杆装置
抗蛇行 减振器 垂向减振器 抗侧滚扭杆
垂向减振器 吊索
“Z”字形牵 引杆装置 横向弹 性侧挡
枕梁结构及与转向架 连接部件的安装
牵引拉杆
牵引拉杆和橡胶弹性侧档
牵引拉杆(转向架已翻过来)
CRH1动车 转向架
空气弹簧 二系垂向 液压减振器 4、构架
抗侧滚 扭杆装置 牵引拉杆
6、驱动装置
横向 液压减振器
高度调整装置 1、驱动轮对 5、二系悬挂 抗蛇行减振器 横向弹性侧挡 7、盘形制动装置 (基础制动装置) 牵引电动机 3、一系悬挂 2、轴箱
CRH1的渐进式横向侧档
渐进式机械横向侧档安装在与车架相固结的横向减振器安 装架的内侧,它与横梁连接梁的外侧面配合来阻止转向架 相对于车体的横向运动,传递转向架和车体间的横向力。
Secondary suspension 二系悬挂 横向减震器安装架 Secondary suspension 二系悬挂
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§1 概述 §2 有心盘(或牵引销)+旁承的连接装置 §3 牵引杆装置+旁承的连接装置 §4 摆式支承装置+旁承的连接装置
§1 概述
一.作用
1. 传力——包括:垂向力,纵向力和横向力 2. 均重——通过合理的旁承数量和布置来保
持轴重均匀分配 3. 安定——保证静态时转向架的稳定(转向
其中: 空气弹簧作为旁承传递垂向力; 单牵引拉杆传递纵向力(牵引力或制动力); 横向弹性侧档和空气弹簧共同传递横向力; 横向液压减振器控制横向振动; 抗蛇行减振器(纵向水平布置在转向架侧梁外 侧)衰减蛇行运动。
CRH2动车转向架
——无垂向减振器和抗侧
滚扭杆装置
横向液压减振器
横向弹性侧档
为什么不要抗 侧滚扭杆?
产生摩擦力矩Mf≈1400kgm,而复原力矩Mb
由橡胶旁承产生但很小;
③ 车体与转向架间可相对横动±60mm,且为弹
性横动——可降低轮轨间的侧向动作用力;
④ 车体与转向架间设有横向液压减振器——可 衰减横向振动。
§3 牵引杆装置+旁承的连接装置
——东风4系列内燃机车(韶山3B机车与DF4相同)
一.位置
五.摇摆旁承和摩擦旁承结构
六.特点
1. 重量由中央摆式支承和旁承共同承担,其中: 每个中央摆式支承装置承重12t,每个摇摆旁 承承重3.5t,每个摩擦旁承承重3.5t
2. 纵向力由中央摆式支承传递;
3. 横向力的传递过程:
当车体相对于转向架的横向相对位移小于 30mm时,由复原装置和摩擦旁承传递横向 力;
② 在曲线上(或进曲线时),机车必须克服 Mb+ Mf ,故设计时必须选择合适的Mb和 Mf ;
③ 出曲线时,力矩Mb- Mf 可使转向架与车体 恢复原位;
④ 现代机车上,一般取Mb=0,但Mf 对衰减 蛇行振动有利,故通常保留,但当使用抗 蛇行减振器来衰减蛇行时,可取消Mf。
二.韶山3型电力机车(与ND4内燃机车相同)
拉杆座
车体
拉杆
旁承 构架 连接杆
拐臂
15+5
弹性侧档
东风4型内燃机车车体与转向架间的连接装置 ——牵引杆机构+弹性旁承 结构示意图
• 牵引杆机构简图
二.旁承——平面摩擦式弹性旁承
由4块橡胶垫、球头 杆、球头座、上摩擦 板、下摩擦板和旁承 座等组成。
其中:上摩擦板材料 为MC尼龙,下摩擦 板材料为45#钢。
而当车体相对于转向架的横向相对位移达到 30mm时,则由弹性侧档传递横向力;
4. 复原装置产生复原力矩,复原弹簧刚度 k=100kg/mm;
5. 摩擦旁承产生摩擦力矩Mf;
6. 车体与构架间可弹的连接装置
我国引进并合作生产的高速动车组CRH1和CRH2 均采用单牵引拉杆+空气弹簧作为车体与转向 架间的连接装置。
2. 结构
复原力Fb
复原力Fb
3. 特点
① 刚性旁承传递全部重量,而心盘传递全部纵 向力和横向力;
② 车体与转向架有相对回转时,旁承会产生较 大的摩擦力矩Mf和复原力矩Mb:
Mf≈1500kgm;Mb≈1800kgm;
③ 车体与构架间不能横动(因上、下心盘间在 水平面内无间隙)。
3. 摩擦力矩Mf和复原力矩Mb的作用 ① 在直线上,Mf可用以衰减蛇行振动,而Mb 用以控制蛇行产生;
牵引销
牵引销
牵引块 转 向 架 横 梁
尼龙衬套 纵向
牵
引
点
距
轨
传力框
面 高
度
横
横
梁
横向
梁
60mm
60mm
横向止档(橡胶)
750mm
纵向
垫板 牵引销装置结构示意图
60mm
横向止档
3.特点
① 高挠橡胶堆旁承传递全部重量,牵引销传递 纵向力,而横向力由牵引销(弹性侧档)和旁 承共同承担;
② 车体相对于转向架回转时,纵向摩擦减振器
1. 位置
车体
前旁承
后旁承
60mm 60mm
构架 车体
牵引销装置
纵向摩擦减振器
横向减振器
韶山3型电力机车车体与转向架间的连接装置 ——牵引销装置+弹性旁承 结构示意图
2.结构
①旁承 旁承——无摩擦式 高挠橡胶堆旁承
由2块端板、7块隔 板和橡胶硫化成一 个整体
无摩擦式高挠橡胶堆旁承
②牵引销装置 由牵引销、牵引销座、传力框、牵引块、横向止 挡、垫板和尼龙衬套等组成
该旁承无复原力矩即 Mb=0,但可产生摩擦
力矩Mf ≈ 1900~
3800kgm
三.牵引杆装置
牵引杆机构+弹性侧档 ⇒ 牵引销(或心盘)
1. 可传递纵向力(牵引 力或制动力):由牵
拉杆座, 与车体底 架相连
引杆机构承担; 也可传递横向力:由
弹性侧档,与 构架侧梁相连
弹性侧档承担;
固定支座,与
2. 可实现回转(但回转 构架侧梁相连
3. 中央摆式支承 + 旁承 ——韶山1型电力机车
§2 有心盘(或牵引销)+旁承的连接装置
¾ 心盘(或牵引销)仅传递纵向力和横向力
¾ 旁承传递全部重量
一.东风型机车
1. 位置
旁承
车体
心盘
旁承
心盘
Ф2730
东风型内燃机车车体与转向架间的连接装置 ——心盘+刚性旁承 结构示意图
四个刚性旁承布 置在与心盘同一 转向架 圆心、直径为 φ2730mm的圆周 上,且滚子轴线 与半径间的夹角 β=5°。
30±2mm 中央摆式支承
构架
承、复原
装置、旁
承和侧档
等组成
30±2mm
摩擦旁承 弹性侧档
复原弹簧
韶山1型电力机车车体与转向架间的连接装置 ——中央摆式支承装置+旁承 结构示意图
三.中央摆式支承结构
由减振橡胶垫、支承体、复原装置、上锥体、
下锥体和垫块等组成
前后方向
左右方向
车体
转向架
四.复原装置结构
中心在一定范围内变
中间连接杆
回转中心
(15+5)
化);
±
3. 可容许车体相对于转 向架横动:
拐臂
牵引拉杆
横动量=±(自由间隙 +侧档被压缩量) =±(15+5)mm。
牵引杆装置运动原理示意图
¾ 牵引杆装置结构图
§4 摆式支承装置+旁承的连接装置
——韶山1型电力机车
一.位置
(如图示)
车体
二.组成
由中央支 摇摆旁承
架依靠一系悬挂不能保持稳定,必须通过 旁承的数量配合来满足稳定的要求) 4. 允许横动——使转向架与车体间实现横向 弹性连接 5. 容许相互回转——即转向架相对于车体回 转,以满足转向要求
二.形式
1. 有心盘(或牵引销)+ 旁承 ——东风、韶山3型机车
2. 牵引杆装置 + 旁承 ——东风4系列、东风8和东风11型机车 韶山3B型电力机车